Добычная установка, в частности для горных разработок, и способ управления добычной установкой
Номер патента: 17215
Опубликовано: 30.06.2013
Авторы: БЕКЕР, Уве, БОЙМЛЕР, Манфред, МЕРТЕН, Герхард, ШЮРЕР, Карл-Хайнц, ВИРТЦ, Йорг
Текст
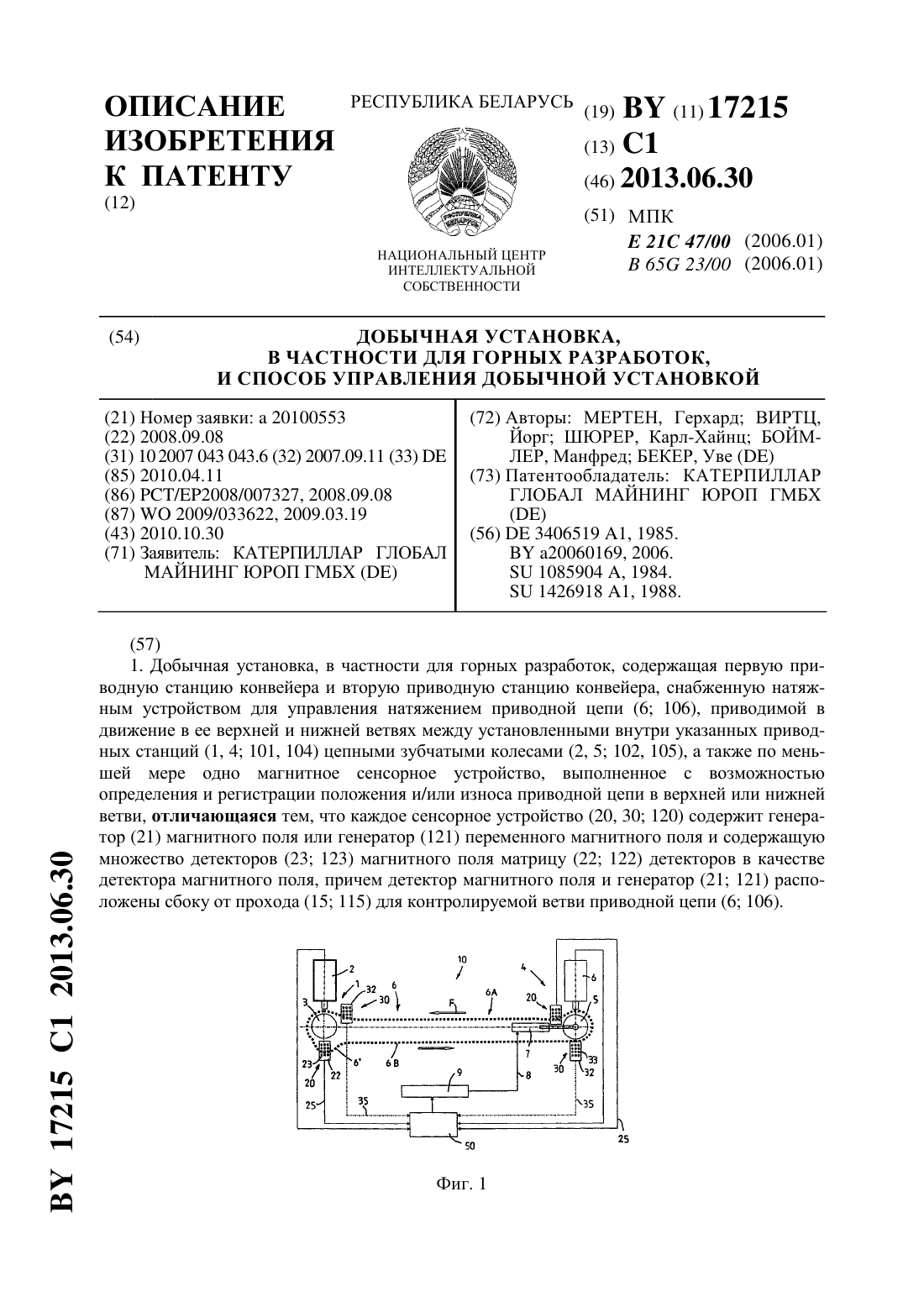
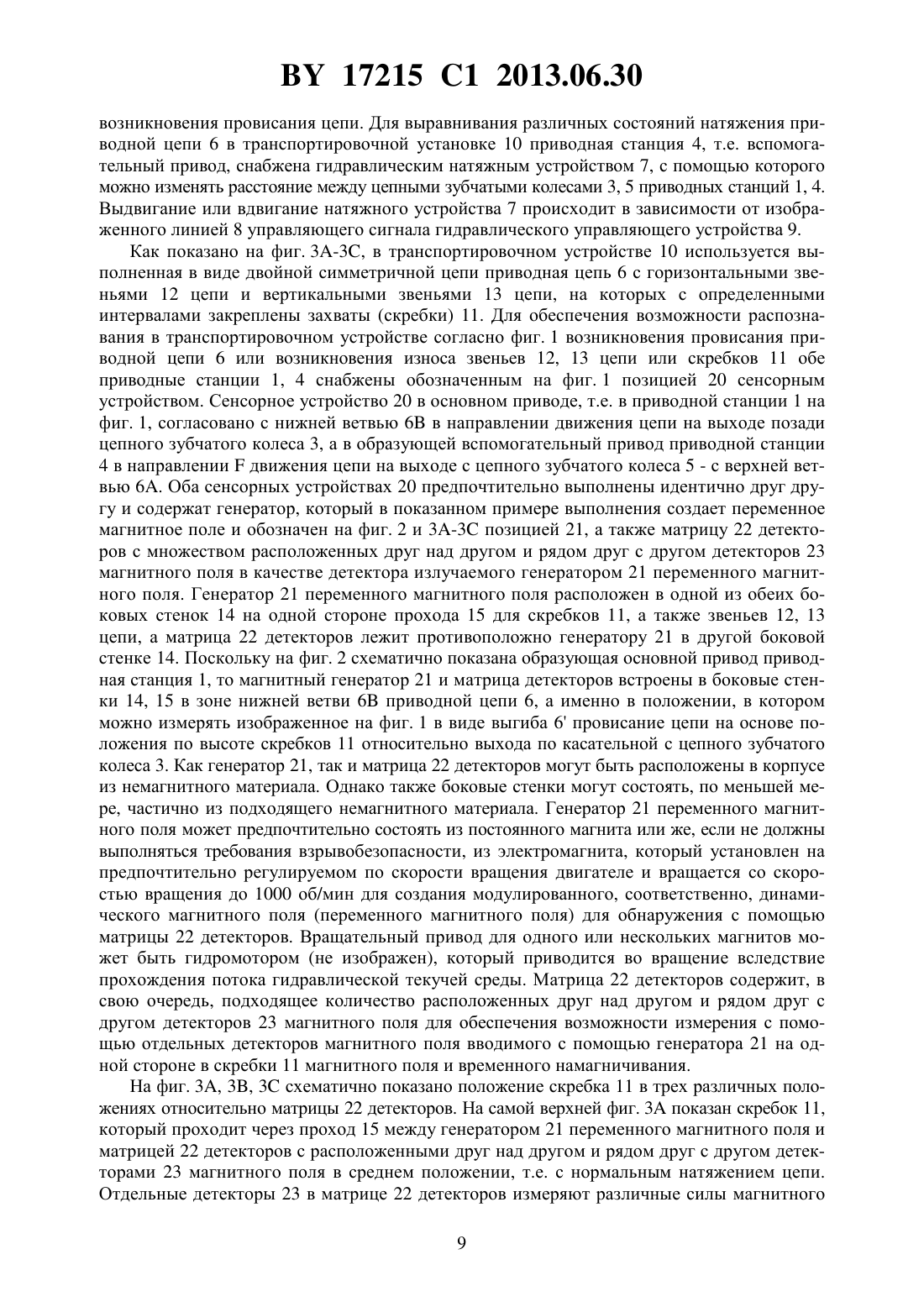
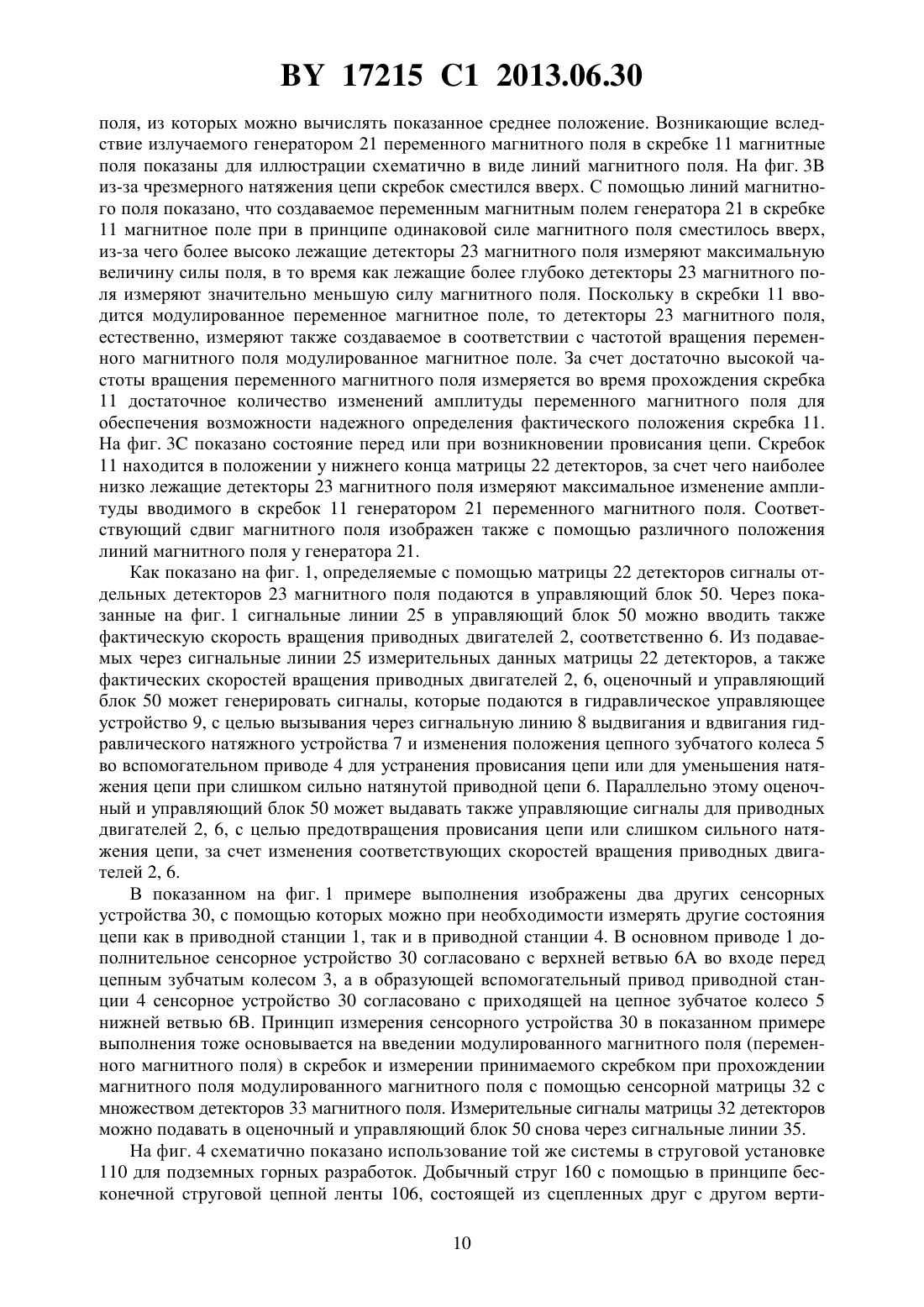
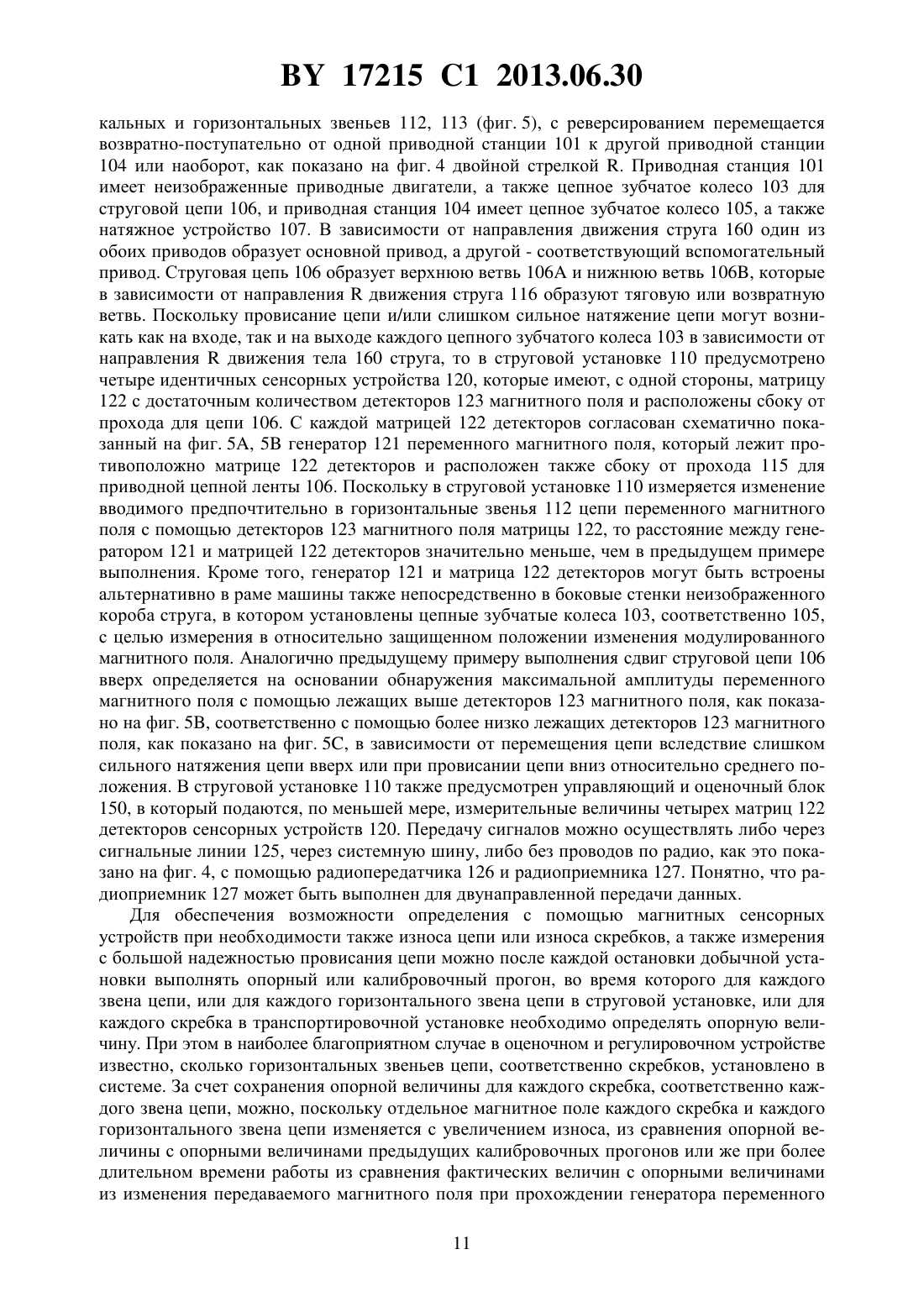
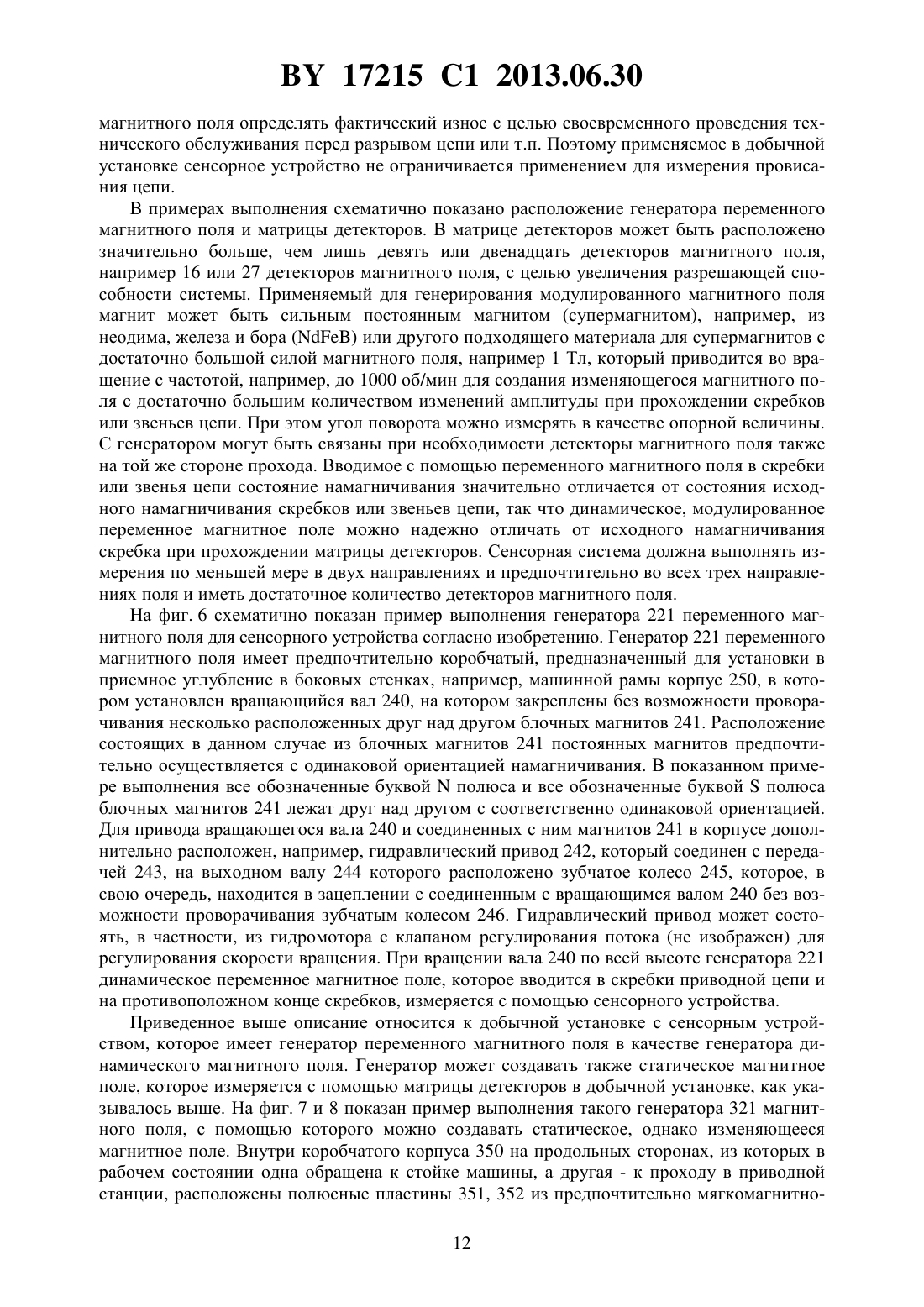
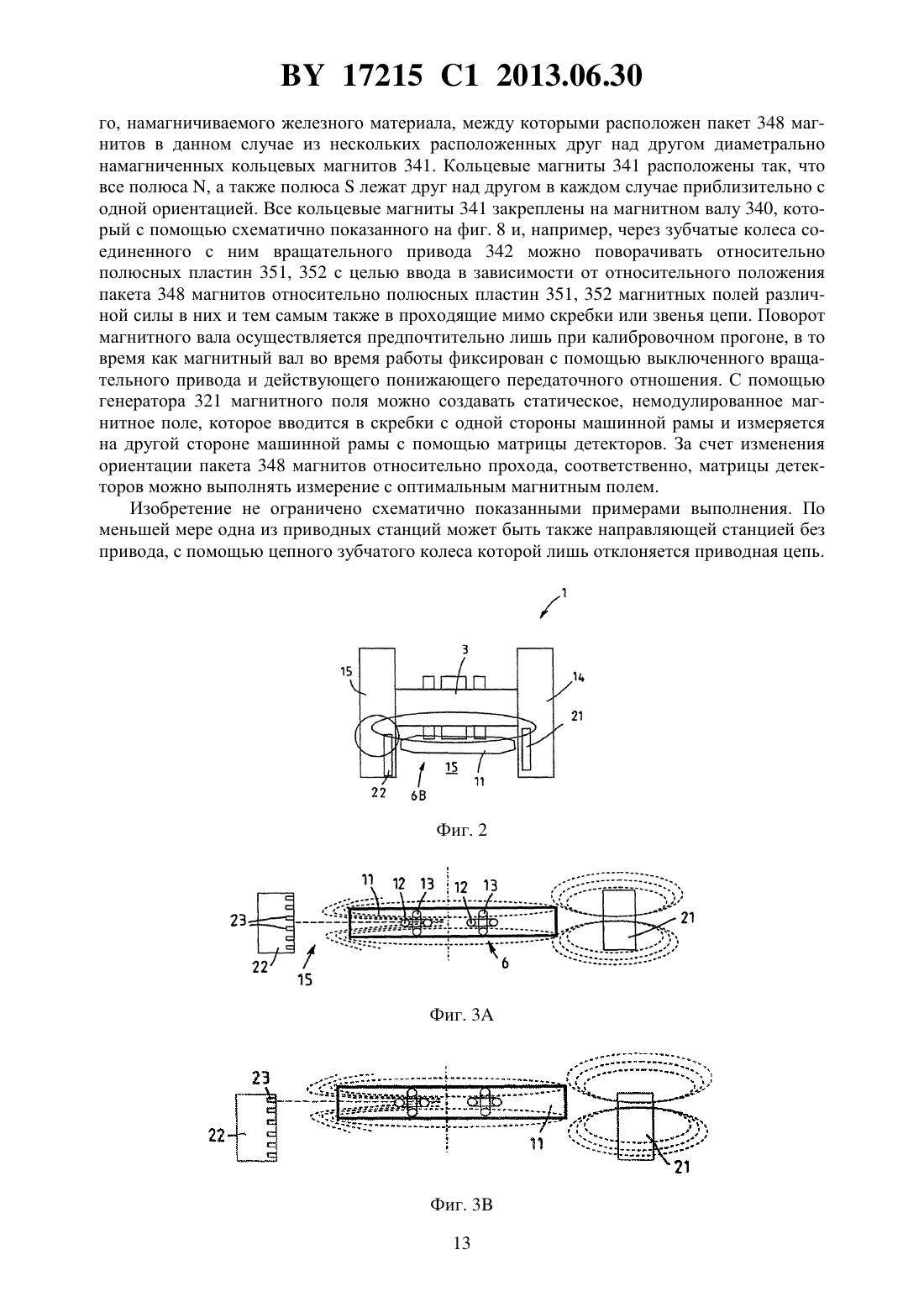
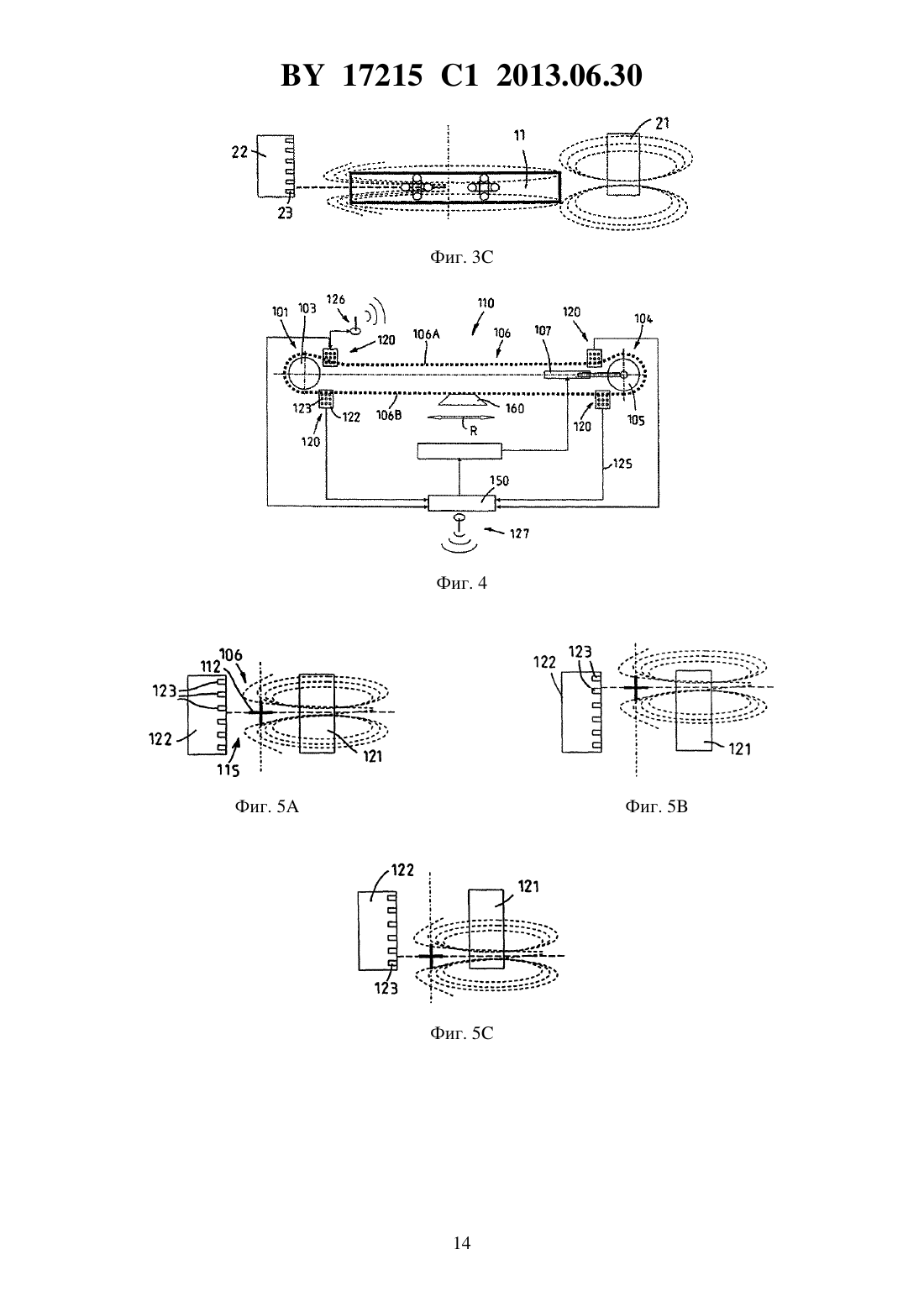
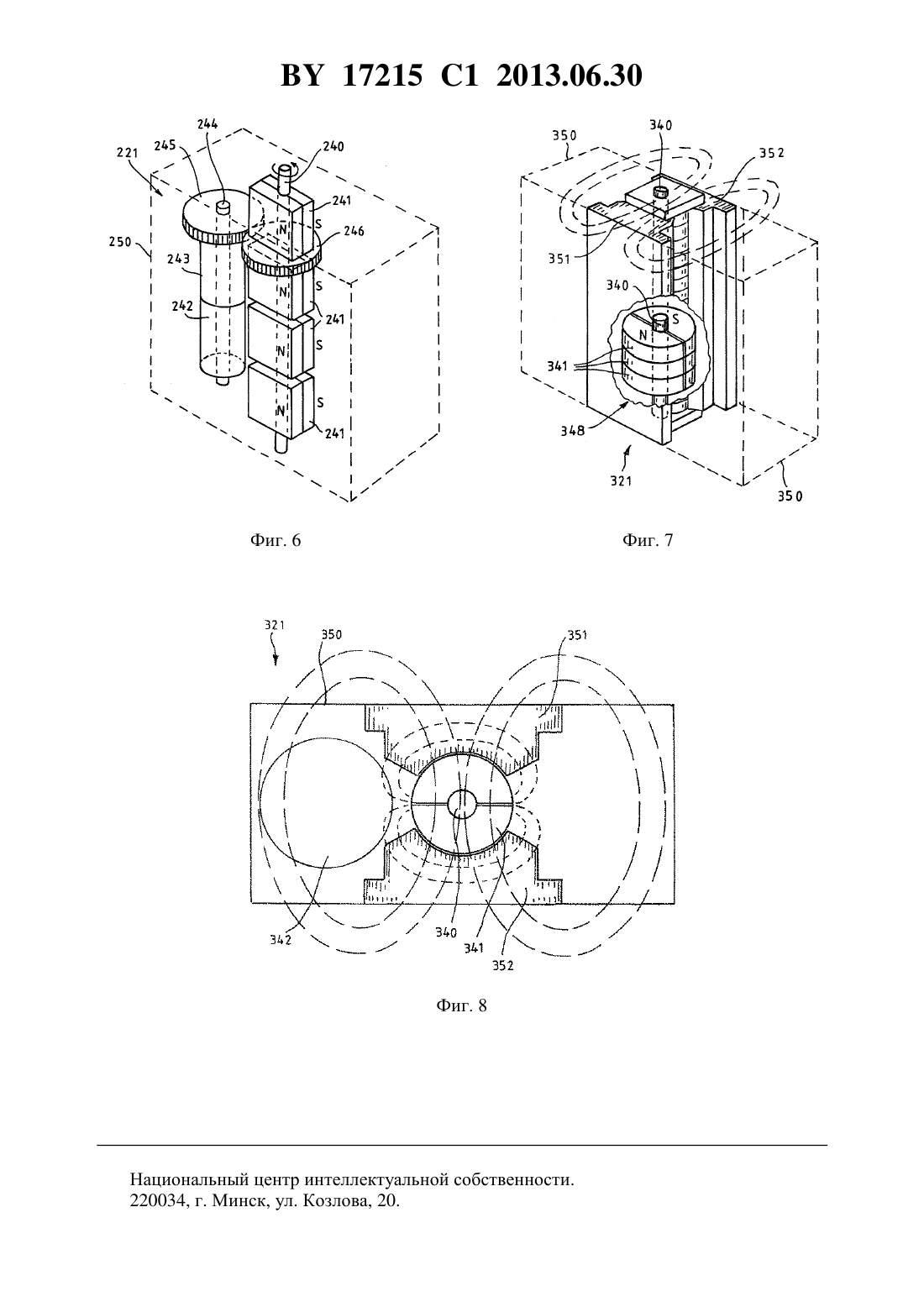
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ДОБЫЧНАЯ УСТАНОВКА,В ЧАСТНОСТИ ДЛЯ ГОРНЫХ РАЗРАБОТОК,И СПОСОБ УПРАВЛЕНИЯ ДОБЫЧНОЙ УСТАНОВКОЙ(71) Заявитель КАТЕРПИЛЛАР ГЛОБАЛ МАЙНИНГ ЮРОП ГМБХ(73) Патентообладатель КАТЕРПИЛЛАР ГЛОБАЛ МАЙНИНГ ЮРОП ГМБХ(57) 1. Добычная установка, в частности для горных разработок, содержащая первую приводную станцию конвейера и вторую приводную станцию конвейера, снабженную натяжным устройством для управления натяжением приводной цепи (6 106), приводимой в движение в ее верхней и нижней ветвях между установленными внутри указанных приводных станций (1, 4 101, 104) цепными зубчатыми колесами (2, 5 102, 105), а также по меньшей мере одно магнитное сенсорное устройство, выполненное с возможностью определения и регистрации положения и/или износа приводной цепи в верхней или нижней ветви, отличающаяся тем, что каждое сенсорное устройство (20, 30 120) содержит генератор (21) магнитного поля или генератор (121) переменного магнитного поля и содержащую множество детекторов (23 123) магнитного поля матрицу (22 122) детекторов в качестве детектора магнитного поля, причем детектор магнитного поля и генератор (21 121) расположены сбоку от прохода (15 115) для контролируемой ветви приводной цепи (6 106). 17215 1 2013.06.30 2. Установка по п. 1, отличающаяся тем, что указанные генератор (21 121) и детектор магнитного поля (22 122) установлены на противоположных сторонах указанного прохода, причем матрица (22 122) детекторов расположена на соответствующей стороне прохода по его высоте. 3. Установка по п. 1 или 2, отличающаяся тем, что матрица (22 122) детекторов содержит множество расположенных рядом друг с другом детекторов (23) магнитного поля и множество расположенных друг над другом детекторов (23) магнитного поля. 4. Установка по п. 1, отличающаяся тем, что матрица (22) детекторов расположена в боковой стенке машинной рамы или короба цепного зубчатого колеса соответствующей приводной станции. 5. Установка по п. 1 или 2, отличающаяся тем, что указанный генератор (21) установлен в боковой стенке (14) машинной рамы или короба цепного зубчатого колеса соответствующей приводной станции. 6. Установка по п. 4, отличающаяся тем, что матрица детекторов и/или генератор магнитного поля установлены в корпусе из немагнитного материала, например из латуни,или бронзы, или меди, или алюминия, или титана, или аустенитной стали, или ее сплавов,или керамики, или пластмассы. 7. Установка по п. 5, отличающаяся тем, что матрица детекторов и/или генератор магнитного поля расположены в корпусе из немагнитного материала, например из латуни,или бронзы, или меди, или алюминия, или титана, или аустенитной стали, или ее сплавов,или керамики, или пластмассы. 8. Установка по п. 1, отличающаяся тем, что генератор (221) магнитного поля содержит магниты (240), установленные с возможностью их вращения. 9. Установка по п. 8, отличающаяся тем, что генератор (221) магнитного поля содержит гидравлический привод (243) вращения, например гидромотор с клапаном регулирования потока для регулирования скорости вращения указанных магнитов. 10. Установка по п. 8 или 9, отличающаяся тем, что магниты имеют постоянное магнитное поле с индукцией не менее 0,5 Тл. 11. Установка по п. 1, отличающаяся тем, что генератор магнитного поля выполнен с возможностью создания постоянного магнитного поля. 12. Установка по п. 1, отличающаяся тем, что генератор магнитного поля или генератор переменного магнитного поля содержит постоянный магнит, например супермагнит. 13. Установка по п. 1, отличающаяся тем, что генератор магнитного поля или генератор переменного магнитного поля содержит один или несколько магнитов, образующих магнитную систему, выполненную и установленную с возможностью изменения ее положения и/или ориентации относительно детектора магнитного поля. 14. Установка по любому из пп. 1, 2, 11-13, отличающаяся тем, что генератор магнитного поля или генератор переменного магнитного поля содержит магнитную систему с несколькими концентрически расположенными вокруг центральной оси кольцевыми магнитами, выполненную с возможностью поворота вокруг указанной центральной оси и позиционирования в различных положениях с помощью сервопривода. 15. Установка по п. 1 или 2, отличающаяся тем, что выполнена в виде транспортера(10) со скребками (11) на приводной цепи (6) и каждая приводная станция содержит по меньшей мере одно указанное сенсорное устройство для контроля соответствующей ветви цепи в направлении движения позади зубчатого колеса. 16. Установка по п. 1 или 2, отличающаяся тем, что приводная цепь является реверсивно подвижной, а каждая приводная станция (101, 104) содержит два сенсорных устройства(120), одно из которых согласовано с верхней ветвью цепи, а второе - с ее нижней ветвью. 17. Установка по п. 1 или 2, отличающаяся тем, что содержит сенсоры магнитного поля, установленные сбоку от указанного прохода на одной стороне с генератором магнитного поля или генератором переменного магнитного поля для измерения создаваемого 2 17215 1 2013.06.30 им реального магнитного поля с целью использования его в качестве опорной величины при определении указанного магнитного состояния приводной цепи. 18. Способ управления добычной установкой, в частности для горных разработок, содержащей первую приводную станцию (1) и вторую приводную станцию (4), снабженную натяжным устройством для управления натяжением приводной цепи (6 106), приводимой в движение в ее верхней и нижней ветвях между установленными внутри указанных приводных станций (1, 4 101, 104) цепными зубчатыми колесами (2, 5 102, 105), а также по меньшей мере одно магнитное сенсорное устройство для определения и регистрации положения и/или износа приводной цепи в верхней или нижней ветви и блок (50 150) оценки и управления, при котором сигналы с указанного магнитного сенсорного устройства передают на блок (50 150) оценки и управления и с помощью блока (50 150) оценки и управления на основании принятых сигналов управляют положением натяжного устройства (7 107) второй приводной станции или приводами приводных станций, отличающийся тем, что каждым магнитным сенсорным устройством (120) посредством генератора магнитного поля или генератора переменного магнитного поля создают магнитное поле, которое измеряют с помощью множества детекторов (23 123) матрицы (22 122) детекторов магнитного поля, контролируемую ветвь приводной цепи проводят между указанным генератором и матрицей (22 122) детекторов, установленными сбоку от прохода(15 115) для указанной ветви цепи (6 106), а положение и/или износ приводной цепи магнитным сенсорным устройством определяют по изменению магнитного поля, измеренного матрицей детекторов. 19. Способ по п. 18, отличающийся тем, что посредством каждого из указанных детекторов (23) измеряют создаваемое генератором и передаваемое через приводную цепь магнитное поле контролируемой ветви цепи, а ее магнитное состояние определяют по положению одного или нескольких детекторов, измеривших максимальную величину магнитного поля. 20. Способ по п. 18 или 19, отличающийся тем, что посредством согласованных с генератором магнитного поля сенсоров магнитного поля измеряют реальное переменное магнитное поле, создаваемое генератором магнитного поля, и/или измеряют угол поворота вращательного привода генератора, после чего передают одно или другое из измеренных значений в блок оценки и управления в качестве опорной величины при определении магнитного состояния приводной цепи. 21. Способ по п. 18 или 19, отличающийся тем, что магнитное поле создают переменным посредством вращения вокруг центральной оси магнитной системы, содержащей несколько концентрически расположенных вокруг указанной оси кольцевых магнитов и являющейся составной частью указанного генератора магнитного поля. 22. Способ по п. 18 или 19, отличающийся тем, что посредством блока оценки и управления измеряют параметры приводных двигателей приводных станций, в частности скорости вращения, и в соответствии с определенным состоянием приводной цепи регулируют скорость вращения указанных приводов. 23. Способ по п. 18 или 19, отличающийся тем, что после каждой остановки приводной цепи выполняют калибровочный прогон, в процессе которого для каждого звена цепи или для каждого скребка определяют опорную величину базовой намагниченности, которую в рабочем режиме сравнивают с фактической величиной, определенной с помощью матрицы детекторов, для определения магнитного состояния приводной цепи. 24. Способ по п. 18 или 19, отличающийся тем, что передачу информации между сенсорными устройствами и блоком оценки и управления осуществляют по радио. Изобретение относится к добычной установке, в частности для горных разработок, содержащей первую приводную станцию и вторую, предпочтительно натягиваемую с по 3 17215 1 2013.06.30 мощью натяжного устройства приводную станцию, установленные в приводных станциях цепные зубчатые колеса, имеющую цепные звенья и приводимую в действие и/или направляемую с помощью приводимых во вращение от двигателя цепных зубчатых колес приводную цепь, которая проходит между цепными зубчатыми колесами в верхней ветви и в нижней ветви, и по меньшей мере одно сенсорное устройство для определения по меньшей мере одного состояния приводной цепи в верхней ветви или в нижней ветви. Изобретение относится также к способу управления добычной установкой, в частности для горных разработок, содержащей первую приводную станцию и вторую, предпочтительно натягиваемую с помощью натяжного устройства приводную станцию, установленные в приводных станциях цепные зубчатые колеса, имеющую цепные звенья и приводимую в действие с помощью приводимых во вращение от двигателя цепных зубчатых колес приводную цепь, которая проходит между цепными зубчатыми колесами в верхней ветви и в нижней ветви, по меньшей мере одно сенсорное устройство для определения по меньшей мере одного состояния приводной цепи в верхней ветви или в нижней ветви и управляющее устройство, в которое подаются сигналы сенсорного устройства и которое предназначено для управления состоянием выдвижения натяжного устройства и/или приводами приводных станций. Для работы добычной установки с движущейся по замкнутой траектории или реверсивно работающей приводной цепью огромное значение имеет оценка или проверка с помощью подходящих мер состояния приводной цепи и, в частности, натяжения цепи. В принципе, для этого уже предложены оптические, электрические, магнитные, а также механические сенсорные устройства, которые могут поставлять измерительные сигналы, из которых может выводиться состояние натяжения цепи, а также на основании подходящих алгоритмов параметры управления для натяжного устройства или же для приводных двигателей приводных устройств. В 3406519 1 предлагается использовать магнитно работающее сенсорное устройство для магнитного измерения натяжения цепи в натягиваемой приводной станции. Для этого в 3406519 предлагается генератор магнитного поля, который в направлении движения цепи согласован с выходящей из приводной станции ветвью. Предусмотренный для измерения натяжения цепи в верхней ветви генератор магнитного поля расположен в металлическом листе дна, а предусмотренный для измерения натяжения цепи в нижней ветви генератор магнитного поля расположен в металлическом листе дна приводной станции над нижней ветвью с целью измерения изменения магнитного поля, которое возникает вследствие изменения расстояния между подлежащей измерению цепью и звеньями цепи. Наряду с провисанием цепи должно осуществляться также измерение расстояния между скребками транспортерной цепи или же изменений расстояния между звеньями цепи в комбинации с регулированием провисания цепи. Принцип измерения согласно 3406519 основывается на том, что создается направленное магнитное поле, которое расстраивается за счет различно глубоко погружающихся в магнитное поле звеньев цепи, при этом изменения измеряемого магнитного поля оцениваются метрологически. Поскольку магнитный измерительный датчик, включая измерительное устройство, расположен в металлическом листе дна выходящей ветви, то возникает большой износ, который сильно ограничивает срок службы такой измерительной системы. Поэтому техническая реализация известной из 3406519 1 системы для измерения провисания цепи, а также других состояний цепи не была доведена до серийного использования. Задачей изобретения является создание добычной установки, а также способа управления добычной установкой, которые обеспечивают возможность надежного определения состояния приводной цепи с помощью работающего без контакта сенсорного устройства и при высокой надежности системы имеют значительно более длительный срок службы. Эта и другие задачи в добычной установке, в частности для горных разработок, содержащей первую приводную станцию конвейера и вторую приводную станцию конвейе 4 17215 1 2013.06.30 ра, снабженную натяжным устройством для управления натяжением приводной цепи,приводимой в движение в ее верхней и нижней ветвях между установленными внутри указанных приводных станций цепными зубчатыми колесами, а также по меньшей мере одно магнитное сенсорное устройство, выполненное с возможностью определения, соответственно, регистрации по меньшей мере положения и/или износа приводной цепи в верхней или нижней ветви, согласно изобретению, решаются тем, что каждое сенсорное устройство содержит генератор магнитного поля или генератор переменного магнитного поля и снабженную множеством детекторов магнитного поля матрицу детекторов в качестве детектора, причем детектор и генератор магнитного поля расположены сбоку от прохода для обмериваемой ветви приводной цепи. Системотехническое преимущество добычной установки, согласно изобретению, состоит в том, что сенсорное устройство измеряет с помощью измерительных средств не изменение магнитного поля из-за различного расстояния звеньев цепи от генератора магнитного поля, соответственно детектора, а измеряет изменение положения, соответственно изменение высоты скребка или звена цепи поперек направления движения приводной цепи. В добычной установке согласно изобретению магнитное поле вводится в приводную цепь, и для каждого детектора магнитного поля матрицы детекторов определяется измерительный сигнал. Если положение звена цепи или скребка изменяется внутри сенсорного поля относительно его положения при предыдущем прохождении или относительно заданного нулевого положения, то из этого можно заключить, находится ли звено цепи, соответственно скребок, в зоне матрицы детекторов дальше вверх или вниз. Если одновременно измеряется сигнал времени для каждого скребка или каждого звена цепи, то можно также обнаруживать различное расстояние друг от друга звеньев цепи или скребков, за счет чего можно определять также другие состояния цепи, такие как, например, износ цепи, скручивание цепи или т.п. Выполненный в виде матрицы детекторов детектор и генератор магнитного поля могут быть расположены на одной и той же стороне рядом друг с другом. В предпочтительном варианте выполнения детектор и генератор магнитного поля расположены противоположно друг другу, так что генератор магнитного поля вводит магнитное поле на одной стороне в звенья цепи или скребки, а детекторы магнитного поля матрицы детекторов измеряют передаваемое звеньями цепи или скребками магнитное поле на другой стороне прохода. Для обеспечения возможности надежного обнаружения, в частности, провисаний цепи особенно предпочтительно, если матрица детекторовс множеством детекторов проходит по высоте прохода. В особенно предпочтительном варианте выполнения матрица детекторов имеет множество расположенных рядом друг с другом детекторов магнитного поля для измерения в достаточно большой зоне передаваемого, соответственно проводимого дальше, подлежащим измерению звеном цепи или скребком поперек направления прохождения приводной цепи магнитного переменного поля. Для уменьшения вычислительных затрат можно при этом располагать детекторы магнитного поля рядами и столбцами с одинаковыми расстояниями между ними. За счет двумерного расположения детекторов магнитного поля в матрице детекторов можно осуществлять измерение и развертывание передаваемого магнитного поля с помощью детекторов магнитного поля, которые при необходимости измеряют и определяют исключительно горизонтальные составляющие передаваемого магнитного поля. Особенно предпочтительно, если матрица детекторов и/или генератор магнитного поля расположены, в частности встроены, в боковые стойки машинной рамы или боковые стенки короба цепного зубчатого колеса приводной станции. В боковых стойках или в боковых стенках ни детектор, ни генератор магнитного поля не подвергаются достойному упоминания износу, поскольку даже при провисании цепи или при выполнении работ по техническому обслуживанию звенья цепи или скребки не приходят в контакт с генератором и детектором. В обеих боковых стойках, соответственно боковых стенках, в большин 5 17215 1 2013.06.30 стве случаев имеется достаточное конструктивное пространство для размещения матрицы детекторов, а также генератора магнитного поля. Для предотвращения взаимодействия с образованными машинной рамой окружающими конструкциями матрица детекторов и/или генератор магнитного поля предпочтительно расположены в корпусе или в несущей конструкции из немагнитного материала. Материал может быть латунью, бронзой, медью, алюминием, титаном, аустенитной сталью или ее сплавами, керамикой или пластмассой. Применяемые материалы, соответственно применяемые сплавы, должны отвечать всем требованиям взрывобезопасности (по метану, газам) для соответствующей цели применения. Согласно одному варианту выполнения изобретения, с помощью генераторов магнитного поля можно создавать статическое, постоянное во времени магнитное поле. Согласно предпочтительному альтернативному варианту выполнения, для создания динамического магнитного поля используются генераторы переменного магнитного поля. За счет использования генераторов переменного магнитного поля в магнитном сенсорном устройстве для измерения применяется модулированное магнитное поле, которое предотвращает ошибочные измерения из-за различных магнитных предпочтительных направлений подлежащих измерению звеньев цепи или скребков. В результате проведенных заявителем исследований было установлено, что звенья цепи и установленные в приводных цепях транспортеров скребки (цепные скребки) при намагничивании поперек направления движения приводной цепи имеют явно различные плотности магнитного потока, а также усиления излучаемого магнитным генератором магнитного поля. При применении генераторов переменного магнитного поля предотвращается зависимость от магнитного предпочтительного направления подлежащего измерению звена цепи или скребка, поскольку переменное магнитное поле измеряется с помощью детекторов в матрице детекторов. В особенно предпочтительном варианте выполнения генератор магнитного поля образован при этом вращаемым или вращающимся магнитом. Скорость вращения магнита может составлять по меньшей мере 100 об/мин и вплоть до 1000 об/мин и больше. Кроме того,магнит может предпочтительно иметь силу магнитного поля по меньшей мере 0,5 Тл(Тесла). Вращаемый или вращающийся магнит может быть, в частности, постоянным магнитом. При этом генератор магнитного поля может содержать один или же несколько вращаемых, соответственно вращающихся, магнитов для достижения высокой частоты переменного магнитного поля также при низких скоростях вращения. Несколько постоянных магнитов могут быть расположены, в частности, во вращаемом носителе из немагнитного материала. Для выполнения требований взрывобезопасности генератор переменного магнитного поля предпочтительно имеет гидравлический привод вращения, в частности гидромотор с клапаном регулирования потока для регулирования скорости вращения. Гидравлическая жидкость может ответвляться из центральной подземной сети гидравлического снабжения для проходческих щитов и перестановочных устройств с уменьшением уровня давления с помощью ступени регулирования давления до допустимого для гидромотора давления. В этом случае включение и выключение можно осуществлять с помощью вспомогательных многоходовых клапанов. Особенно предпочтительно, если вращательный привод генератора магнитного поля согласован с датчиком угла поворота для определения фактического угла поворота модулятора и передачи в блок оценки и управления. В другом варианте выполнения магнит или несколько магнитов генератора магнитного поля могут образовывать магнитную систему, положение и/или ориентацию которой можно изменять относительно сенсора магнитного поля с целью создания изменяемого, в частности, по силе магнитного поля. Для этого генератор магнитного поля может предпочтительно иметь магнитную систему с несколькими расположенными концентрично вокруг средней оси кольцевыми магнитами, при этом кольцевая система выполнена с возможностью поворота вокруг центральной оси с помощью сервопривода. В этом случае особенно предпочтительно, если магнитная система выполнена с возможностью позициони 6 17215 1 2013.06.30 рования в различных положениях поворота с помощью сервопривода. Это можно обеспечивать, например, с помощью самотормозящегося сервопривода с большим уменьшением скорости вращения, который может состоять, в частности, из электрического сервопривода, который обесточивается в желаемом положении поворота. Добычная установка может быть выполнена в виде транспортера со скребками в приводной цепи, и каждая приводная станция имеет в этом случае при необходимости лишь одно сенсорное устройство, которое согласовано с ветвью, которая в направлении движения цепи выходит из приводной станции позади цепного зубчатого колеса. Поскольку транспортеры работают с точки зрения привода и регулирования в большинстве случаев с одним основным приводом и одним вспомогательным приводом, то в этом случае одно сенсорное устройство может быть расположено в нижней ветви основного привода, а второе сенсорное устройство - в верхней ветви вспомогательного привода. В качестве альтернативного решения, добычная установка может быть, например, струговой установкой с реверсивно подвижной приводной цепью, при этом каждая приводная станция имеет два сенсорных устройства, из которых в каждой приводной станции одно сенсорное устройство предусмотрено или расположено в верхней ветви и одно сенсорное устройство - в нижней ветви. При реверсивно подвижной приводной цепи приводы приводных станций должны выполнять основную работу в зависимости от направления движения добычной установки,так что провисание цепи может возникать в каждой приводной станции как перед цепным зубчатым колесом, так и после цепного зубчатого колеса. Однако также в транспортерах с каждой ветвью может быть согласовано одно сенсорное устройство. Кроме того, предпочтительно генератору магнитного поля могут соответствовать на той же стороне прохода сенсоры магнитного поля для измерения создаваемого генератором магнитного поля в качестве опорной величины. Указанная выше задача решена в способе согласно изобретению тем, что каждое сенсорное устройство создает статическое магнитное поле или динамическое переменное магнитное поле, которое измеряется с помощью образованной из нескольких детекторов магнитного поля матрицы детекторов, при этом подлежащая измерению ветвь приводной цепи проходит между генератором магнитного поля и матрицей детекторов, и из изменения положения измеренного в матрице детекторов магнитного поля или переменного магнитного поля определяют состояние приводной цепи. В способе согласно изобретению особенно предпочтительно, если каждый детектор магнитного поля матрицы детекторов измеряет создаваемое генератором магнитного поля и передаваемое приводной цепью, т.е. звеньями цепи или скребками, магнитное поле или переменное магнитное поле, и из положения одного или нескольких измеряющих максимальную силу магнитного поля детекторов переменного магнитного поля определяют состояние цепи, в частности положение звеньев цепи или скребков. Особенно предпочтительно, если в блоке оценки и управления измеряются параметры, такие как, например,скорости вращения приводных двигателей приводных станций, и в зависимости от определяемого состояния цепи осуществляется регулирование скорости вращения и/или изменение состояния натяжения натяжного устройства. Однако определяемое с помощью магнитного сенсорного устройства состояние цепи можно также использовать без измерения скорости вращения с целью управления натяжным устройством. Согласно другому варианту выполнения способа с создающим динамическое переменное магнитное поле генератором можно с помощью согласованных с генератором сенсоров магнитного поля измерять реальное, создаваемое генератором переменное магнитное поле и подавать в качестве опорной величины в блок оценки и/или же можно измерять угол поворота вращательного привода генератора и подавать в качестве опорной величины в блок оценки. С помощью этих опорных величин можно проверять измеренный результат дополнительно на наличие неправильных измерений. 17215 1 2013.06.30 Поскольку отдельный скребок или отдельное звено цепи, как показали измерения заявителя, могут иметь не только предпочтительные магнитные направления, но даже при идентичном намагничивании различные изменения вводимого магнитного поля или переменного магнитного поля и поскольку, кроме того, могут возникать взаимодействия между соседними скребками или звеньями цепи, то в особенно предпочтительном варианте выполнения после остановки приводной цепи инициируется процесс калибровки, в котором для каждого звена цепи или каждого скребка определяют опорную величину для базового намагничивания, которую во время работы сравнивают с фактической, измеренной с помощью матрицы детекторов измеренной величиной, с целью определения из этого изменения состояния цепи, такое как, например, изменение длины или увеличенный износ отдельных звеньев цепи или скребков. Другие преимущества и варианты выполнения изобретения следуют из приведенного ниже описания примеров выполнения со ссылками на прилагаемые фигуры, на которых схематично изображено фиг. 1 - принципиальная схема выполненной в виде транспортера добычной установки согласно изобретению для подземных горных разработок фиг. 2 - рама привода приводной станции для добычной установки, согласно фиг. 1, с встроенным сенсорным устройством фиг. 3-3 - принцип распознавания положения в магнитном сенсорном устройстве согласно изобретению фиг. 4 - выполненная в виде струговой установки добычная установка с сенсорным устройством согласно изобретению на виде, аналогичном фиг. 1 фиг. 5-5 - определение различных положений цепи в струговой установке согласно фиг. 4 фиг. 6 - пример выполнения генератора переменного магнитного поля, в изометрической проекции в сильно упрощенном виде фиг. 7 - пример выполнения генератора переменного магнитного поля с изменяемым магнитным полем, в изометрической проекции в сильно упрощенном виде, частично в разрезе фиг. 8 - генератор переменного магнитного поля согласно фиг. 7, вид сверху. На фиг. 1 схематично показана обозначенная в целом позицией 10 транспортировочная установка для подземных горных разработок. Транспортировочная установка 10 содержит известным образом первую приводную станцию 1 со схематично изображенным приводным двигателем 2 и цепным зубчатым колесом 3, а также на другом конце транспортировочной установки 10 вторую приводную станцию 4 тоже с цепным зубчатым колесом 5, а также соответствующим приводным двигателем 6. Приводные двигатели 2 и 6 могут иметь в принципе подходящее для каждой цели использования выполнение, могут быть выполнены в виде синхронных двигателей, двигателей с питанием от вентильных преобразователей частоты, и могут содержать редукторы, регулировочные устройства,предохранительные муфты и т.п. Между обоими цепными зубчатыми колесами 3, 5 обращается бесконечная скребковая цепь 6 в обозначенном стрелкойнаправлении транспортировки, при этом материал, который добывается с помощью подходящих добычных инструментов в подземном забое, транспортируется на верхней ветви 6 с помощью схематично изображенных на фиг. 2 и 3-3 скребков 11 в направлении рабочей станции 1,которая в данном случае образует основной привод. Верхняя ветвь вращающейся по замкнутой траектории на цепных зубчатых колесах 3, 5 приводной цепи обозначена на фиг. 1 позицией 6, а возвратная ветвь или ветвь холостого хода приводной цепи 6 обозначена позицией 6. В подземном транспортере тот привод, к которому движется верхняя ветвь 6, развивает большую приводную мощность, поэтому, прежде всего, в нижней ветви 6 позади цепного зубчатого колеса 3 приводной станции 1, но также и в нижней ветви 6 позади цепного зубчатого колеса 5 приводной станции 4 существует опасность 8 17215 1 2013.06.30 возникновения провисания цепи. Для выравнивания различных состояний натяжения приводной цепи 6 в транспортировочной установке 10 приводная станция 4, т.е. вспомогательный привод, снабжена гидравлическим натяжным устройством 7, с помощью которого можно изменять расстояние между цепными зубчатыми колесами 3, 5 приводных станций 1, 4. Выдвигание или вдвигание натяжного устройства 7 происходит в зависимости от изображенного линией 8 управляющего сигнала гидравлического управляющего устройства 9. Как показано на фиг. 3-3, в транспортировочном устройстве 10 используется выполненная в виде двойной симметричной цепи приводная цепь 6 с горизонтальными звеньями 12 цепи и вертикальными звеньями 13 цепи, на которых с определенными интервалами закреплены захваты (скребки) 11. Для обеспечения возможности распознавания в транспортировочном устройстве согласно фиг. 1 возникновения провисания приводной цепи 6 или возникновения износа звеньев 12, 13 цепи или скребков 11 обе приводные станции 1, 4 снабжены обозначенным на фиг. 1 позицией 20 сенсорным устройством. Сенсорное устройство 20 в основном приводе, т.е. в приводной станции 1 на фиг. 1, согласовано с нижней ветвью 6 в направлении движения цепи на выходе позади цепного зубчатого колеса 3, а в образующей вспомогательный привод приводной станции 4 в направлениидвижения цепи на выходе с цепного зубчатого колеса 5 - с верхней ветвью 6. Оба сенсорных устройствах 20 предпочтительно выполнены идентично друг другу и содержат генератор, который в показанном примере выполнения создает переменное магнитное поле и обозначен на фиг. 2 и 3-3 позицией 21, а также матрицу 22 детекторов с множеством расположенных друг над другом и рядом друг с другом детекторов 23 магнитного поля в качестве детектора излучаемого генератором 21 переменного магнитного поля. Генератор 21 переменного магнитного поля расположен в одной из обеих боковых стенок 14 на одной стороне прохода 15 для скребков 11, а также звеньев 12, 13 цепи, а матрица 22 детекторов лежит противоположно генератору 21 в другой боковой стенке 14. Поскольку на фиг. 2 схематично показана образующая основной привод приводная станция 1, то магнитный генератор 21 и матрица детекторов встроены в боковые стенки 14, 15 в зоне нижней ветви 6 приводной цепи 6, а именно в положении, в котором можно измерять изображенное на фиг. 1 в виде выгиба 6 провисание цепи на основе положения по высоте скребков 11 относительно выхода по касательной с цепного зубчатого колеса 3. Как генератор 21, так и матрица 22 детекторов могут быть расположены в корпусе из немагнитного материала. Однако также боковые стенки могут состоять, по меньшей мере, частично из подходящего немагнитного материала. Генератор 21 переменного магнитного поля может предпочтительно состоять из постоянного магнита или же, если не должны выполняться требования взрывобезопасности, из электромагнита, который установлен на предпочтительно регулируемом по скорости вращения двигателе и вращается со скоростью вращения до 1000 об/мин для создания модулированного, соответственно, динамического магнитного поля (переменного магнитного поля) для обнаружения с помощью матрицы 22 детекторов. Вращательный привод для одного или нескольких магнитов может быть гидромотором (не изображен), который приводится во вращение вследствие прохождения потока гидравлической текучей среды. Матрица 22 детекторов содержит, в свою очередь, подходящее количество расположенных друг над другом и рядом друг с другом детекторов 23 магнитного поля для обеспечения возможности измерения с помощью отдельных детекторов магнитного поля вводимого с помощью генератора 21 на одной стороне в скребки 11 магнитного поля и временного намагничивания. На фиг. 3, 3, 3 схематично показано положение скребка 11 в трех различных положениях относительно матрицы 22 детекторов. На самой верхней фиг. 3 показан скребок 11,который проходит через проход 15 между генератором 21 переменного магнитного поля и матрицей 22 детекторов с расположенными друг над другом и рядом друг с другом детекторами 23 магнитного поля в среднем положении, т.е. с нормальным натяжением цепи. Отдельные детекторы 23 в матрице 22 детекторов измеряют различные силы магнитного 9 17215 1 2013.06.30 поля, из которых можно вычислять показанное среднее положение. Возникающие вследствие излучаемого генератором 21 переменного магнитного поля в скребке 11 магнитные поля показаны для иллюстрации схематично в виде линий магнитного поля. На фиг. 3 из-за чрезмерного натяжения цепи скребок сместился вверх. С помощью линий магнитного поля показано, что создаваемое переменным магнитным полем генератора 21 в скребке 11 магнитное поле при в принципе одинаковой силе магнитного поля сместилось вверх,из-за чего более высоко лежащие детекторы 23 магнитного поля измеряют максимальную величину силы поля, в то время как лежащие более глубоко детекторы 23 магнитного поля измеряют значительно меньшую силу магнитного поля. Поскольку в скребки 11 вводится модулированное переменное магнитное поле, то детекторы 23 магнитного поля,естественно, измеряют также создаваемое в соответствии с частотой вращения переменного магнитного поля модулированное магнитное поле. За счет достаточно высокой частоты вращения переменного магнитного поля измеряется во время прохождения скребка 11 достаточное количество изменений амплитуды переменного магнитного поля для обеспечения возможности надежного определения фактического положения скребка 11. На фиг. 3 показано состояние перед или при возникновении провисания цепи. Скребок 11 находится в положении у нижнего конца матрицы 22 детекторов, за счет чего наиболее низко лежащие детекторы 23 магнитного поля измеряют максимальное изменение амплитуды вводимого в скребок 11 генератором 21 переменного магнитного поля. Соответствующий сдвиг магнитного поля изображен также с помощью различного положения линий магнитного поля у генератора 21. Как показано на фиг. 1, определяемые с помощью матрицы 22 детекторов сигналы отдельных детекторов 23 магнитного поля подаются в управляющий блок 50. Через показанные на фиг. 1 сигнальные линии 25 в управляющий блок 50 можно вводить также фактическую скорость вращения приводных двигателей 2, соответственно 6. Из подаваемых через сигнальные линии 25 измерительных данных матрицы 22 детекторов, а также фактических скоростей вращения приводных двигателей 2, 6, оценочный и управляющий блок 50 может генерировать сигналы, которые подаются в гидравлическое управляющее устройство 9, с целью вызывания через сигнальную линию 8 выдвигания и вдвигания гидравлического натяжного устройства 7 и изменения положения цепного зубчатого колеса 5 во вспомогательном приводе 4 для устранения провисания цепи или для уменьшения натяжения цепи при слишком сильно натянутой приводной цепи 6. Параллельно этому оценочный и управляющий блок 50 может выдавать также управляющие сигналы для приводных двигателей 2, 6, с целью предотвращения провисания цепи или слишком сильного натяжения цепи, за счет изменения соответствующих скоростей вращения приводных двигателей 2, 6. В показанном на фиг. 1 примере выполнения изображены два других сенсорных устройства 30, с помощью которых можно при необходимости измерять другие состояния цепи как в приводной станции 1, так и в приводной станции 4. В основном приводе 1 дополнительное сенсорное устройство 30 согласовано с верхней ветвью 6 во входе перед цепным зубчатым колесом 3, а в образующей вспомогательный привод приводной станции 4 сенсорное устройство 30 согласовано с приходящей на цепное зубчатое колесо 5 нижней ветвью 6. Принцип измерения сенсорного устройства 30 в показанном примере выполнения тоже основывается на введении модулированного магнитного поля (переменного магнитного поля) в скребок и измерении принимаемого скребком при прохождении магнитного поля модулированного магнитного поля с помощью сенсорной матрицы 32 с множеством детекторов 33 магнитного поля. Измерительные сигналы матрицы 32 детекторов можно подавать в оценочный и управляющий блок 50 снова через сигнальные линии 35. На фиг. 4 схематично показано использование той же системы в струговой установке 110 для подземных горных разработок. Добычный струг 160 с помощью в принципе бесконечной струговой цепной ленты 106, состоящей из сцепленных друг с другом верти 10 17215 1 2013.06.30 кальных и горизонтальных звеньев 112, 113 (фиг. 5), с реверсированием перемещается возвратно-поступательно от одной приводной станции 101 к другой приводной станции 104 или наоборот, как показано на фиг. 4 двойной стрелкой . Приводная станция 101 имеет неизображенные приводные двигатели, а также цепное зубчатое колесо 103 для струговой цепи 106, и приводная станция 104 имеет цепное зубчатое колесо 105, а также натяжное устройство 107. В зависимости от направления движения струга 160 один из обоих приводов образует основной привод, а другой - соответствующий вспомогательный привод. Струговая цепь 106 образует верхнюю ветвь 106 и нижнюю ветвь 106, которые в зависимости от направлениядвижения струга 116 образуют тяговую или возвратную ветвь. Поскольку провисание цепи и/или слишком сильное натяжение цепи могут возникать как на входе, так и на выходе каждого цепного зубчатого колеса 103 в зависимости от направлениядвижения тела 160 струга, то в струговой установке 110 предусмотрено четыре идентичных сенсорных устройства 120, которые имеют, с одной стороны, матрицу 122 с достаточным количеством детекторов 123 магнитного поля и расположены сбоку от прохода для цепи 106. С каждой матрицей 122 детекторов согласован схематично показанный на фиг. 5, 5 генератор 121 переменного магнитного поля, который лежит противоположно матрице 122 детекторов и расположен также сбоку от прохода 115 для приводной цепной ленты 106. Поскольку в струговой установке 110 измеряется изменение вводимого предпочтительно в горизонтальные звенья 112 цепи переменного магнитного поля с помощью детекторов 123 магнитного поля матрицы 122, то расстояние между генератором 121 и матрицей 122 детекторов значительно меньше, чем в предыдущем примере выполнения. Кроме того, генератор 121 и матрица 122 детекторов могут быть встроены альтернативно в раме машины также непосредственно в боковые стенки неизображенного короба струга, в котором установлены цепные зубчатые колеса 103, соответственно 105,с целью измерения в относительно защищенном положении изменения модулированного магнитного поля. Аналогично предыдущему примеру выполнения сдвиг струговой цепи 106 вверх определяется на основании обнаружения максимальной амплитуды переменного магнитного поля с помощью лежащих выше детекторов 123 магнитного поля, как показано на фиг. 5, соответственно с помощью более низко лежащих детекторов 123 магнитного поля, как показано на фиг. 5, в зависимости от перемещения цепи вследствие слишком сильного натяжения цепи вверх или при провисании цепи вниз относительно среднего положения. В струговой установке 110 также предусмотрен управляющий и оценочный блок 150, в который подаются, по меньшей мере, измерительные величины четырех матриц 122 детекторов сенсорных устройств 120. Передачу сигналов можно осуществлять либо через сигнальные линии 125, через системную шину, либо без проводов по радио, как это показано на фиг. 4, с помощью радиопередатчика 126 и радиоприемника 127. Понятно, что радиоприемник 127 может быть выполнен для двунаправленной передачи данных. Для обеспечения возможности определения с помощью магнитных сенсорных устройств при необходимости также износа цепи или износа скребков, а также измерения с большой надежностью провисания цепи можно после каждой остановки добычной установки выполнять опорный или калибровочный прогон, во время которого для каждого звена цепи, или для каждого горизонтального звена цепи в струговой установке, или для каждого скребка в транспортировочной установке необходимо определять опорную величину. При этом в наиболее благоприятном случае в оценочном и регулировочном устройстве известно, сколько горизонтальных звеньев цепи, соответственно скребков, установлено в системе. За счет сохранения опорной величины для каждого скребка, соответственно каждого звена цепи, можно, поскольку отдельное магнитное поле каждого скребка и каждого горизонтального звена цепи изменяется с увеличением износа, из сравнения опорной величины с опорными величинами предыдущих калибровочных прогонов или же при более длительном времени работы из сравнения фактических величин с опорными величинами из изменения передаваемого магнитного поля при прохождении генератора переменного 11 17215 1 2013.06.30 магнитного поля определять фактический износ с целью своевременного проведения технического обслуживания перед разрывом цепи или т.п. Поэтому применяемое в добычной установке сенсорное устройство не ограничивается применением для измерения провисания цепи. В примерах выполнения схематично показано расположение генератора переменного магнитного поля и матрицы детекторов. В матрице детекторов может быть расположено значительно больше, чем лишь девять или двенадцать детекторов магнитного поля,например 16 или 27 детекторов магнитного поля, с целью увеличения разрешающей способности системы. Применяемый для генерирования модулированного магнитного поля магнит может быть сильным постоянным магнитом (супермагнитом), например, из неодима, железа и бораили другого подходящего материала для супермагнитов с достаточно большой силой магнитного поля, например 1 Тл, который приводится во вращение с частотой, например, до 1000 об/мин для создания изменяющегося магнитного поля с достаточно большим количеством изменений амплитуды при прохождении скребков или звеньев цепи. При этом угол поворота можно измерять в качестве опорной величины. С генератором могут быть связаны при необходимости детекторы магнитного поля также на той же стороне прохода. Вводимое с помощью переменного магнитного поля в скребки или звенья цепи состояние намагничивания значительно отличается от состояния исходного намагничивания скребков или звеньев цепи, так что динамическое, модулированное переменное магнитное поле можно надежно отличать от исходного намагничивания скребка при прохождении матрицы детекторов. Сенсорная система должна выполнять измерения по меньшей мере в двух направлениях и предпочтительно во всех трех направлениях поля и иметь достаточное количество детекторов магнитного поля. На фиг. 6 схематично показан пример выполнения генератора 221 переменного магнитного поля для сенсорного устройства согласно изобретению. Генератор 221 переменного магнитного поля имеет предпочтительно коробчатый, предназначенный для установки в приемное углубление в боковых стенках, например, машинной рамы корпус 250, в котором установлен вращающийся вал 240, на котором закреплены без возможности проворачивания несколько расположенных друг над другом блочных магнитов 241. Расположение состоящих в данном случае из блочных магнитов 241 постоянных магнитов предпочтительно осуществляется с одинаковой ориентацией намагничивания. В показанном примере выполнения все обозначенные буквойполюса и все обозначенные буквойполюса блочных магнитов 241 лежат друг над другом с соответственно одинаковой ориентацией. Для привода вращающегося вала 240 и соединенных с ним магнитов 241 в корпусе дополнительно расположен, например, гидравлический привод 242, который соединен с передачей 243, на выходном валу 244 которого расположено зубчатое колесо 245, которое, в свою очередь, находится в зацеплении с соединенным с вращающимся валом 240 без возможности проворачивания зубчатым колесом 246. Гидравлический привод может состоять, в частности, из гидромотора с клапаном регулирования потока (не изображен) для регулирования скорости вращения. При вращении вала 240 по всей высоте генератора 221 динамическое переменное магнитное поле, которое вводится в скребки приводной цепи и на противоположном конце скребков, измеряется с помощью сенсорного устройства. Приведенное выше описание относится к добычной установке с сенсорным устройством, которое имеет генератор переменного магнитного поля в качестве генератора динамического магнитного поля. Генератор может создавать также статическое магнитное поле, которое измеряется с помощью матрицы детекторов в добычной установке, как указывалось выше. На фиг. 7 и 8 показан пример выполнения такого генератора 321 магнитного поля, с помощью которого можно создавать статическое, однако изменяющееся магнитное поле. Внутри коробчатого корпуса 350 на продольных сторонах, из которых в рабочем состоянии одна обращена к стойке машины, а другая - к проходу в приводной станции, расположены полюсные пластины 351, 352 из предпочтительно мягкомагнитно 12 17215 1 2013.06.30 го, намагничиваемого железного материала, между которыми расположен пакет 348 магнитов в данном случае из нескольких расположенных друг над другом диаметрально намагниченных кольцевых магнитов 341. Кольцевые магниты 341 расположены так, что все полюса , а также полюсалежат друг над другом в каждом случае приблизительно с одной ориентацией. Все кольцевые магниты 341 закреплены на магнитном валу 340, который с помощью схематично показанного на фиг. 8 и, например, через зубчатые колеса соединенного с ним вращательного привода 342 можно поворачивать относительно полюсных пластин 351, 352 с целью ввода в зависимости от относительного положения пакета 348 магнитов относительно полюсных пластин 351, 352 магнитных полей различной силы в них и тем самым также в проходящие мимо скребки или звенья цепи. Поворот магнитного вала осуществляется предпочтительно лишь при калибровочном прогоне, в то время как магнитный вал во время работы фиксирован с помощью выключенного вращательного привода и действующего понижающего передаточного отношения. С помощью генератора 321 магнитного поля можно создавать статическое, немодулированное магнитное поле, которое вводится в скребки с одной стороны машинной рамы и измеряется на другой стороне машинной рамы с помощью матрицы детекторов. За счет изменения ориентации пакета 348 магнитов относительно прохода, соответственно, матрицы детекторов можно выполнять измерение с оптимальным магнитным полем. Изобретение не ограничено схематично показанными примерами выполнения. По меньшей мере одна из приводных станций может быть также направляющей станцией без привода, с помощью цепного зубчатого колеса которой лишь отклоняется приводная цепь. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 15
МПК / Метки
МПК: B65G 23/00, E21C 47/00
Метки: разработок, горных, установка, управления, добычная, добычной, способ, частности, установкой
Код ссылки
<a href="https://by.patents.su/15-17215-dobychnaya-ustanovka-v-chastnosti-dlya-gornyh-razrabotok-i-sposob-upravleniya-dobychnojj-ustanovkojj.html" rel="bookmark" title="База патентов Беларуси">Добычная установка, в частности для горных разработок, и способ управления добычной установкой</a>
Способ управления паротурбинной установкой в нестационарных режимах
Номер патента: 8847
Опубликовано: 28.02.2007
Авторы: Шкода Артем Николаевич, Сорокин Владимир Николаевич, Воронов Евгений Олегович, Кащеев Владимир Петрович, Кащеева Ольга Владимировна
МПК: F01D 25/12, F22G 5/12, F01D 25/10...
Метки: способ, установкой, управления, режимах, паротурбинной, нестационарных
Текст:
...при пуске из холодного состояния пар, по мере прохождения уплотнения, охлаждается и при определенных условиях может сконденсироваться. От влагипроисходит эрозия концевых лабиринтных уплотнений б. Влага в проточной части турбины вызывает эрозионный износ рабочих лопаток, уменьшение КПД турбины. Поэтому пар даже на выходе из уплотнений ЦНД в проточную часть ЦНД должен быть слегка перегреть 1 м над пограничной кривой (хотя бы на 3-5 С)....
Секция щитовой механизированной крепи для горных разработок, а также качающийся рычаг и основание секции для нее
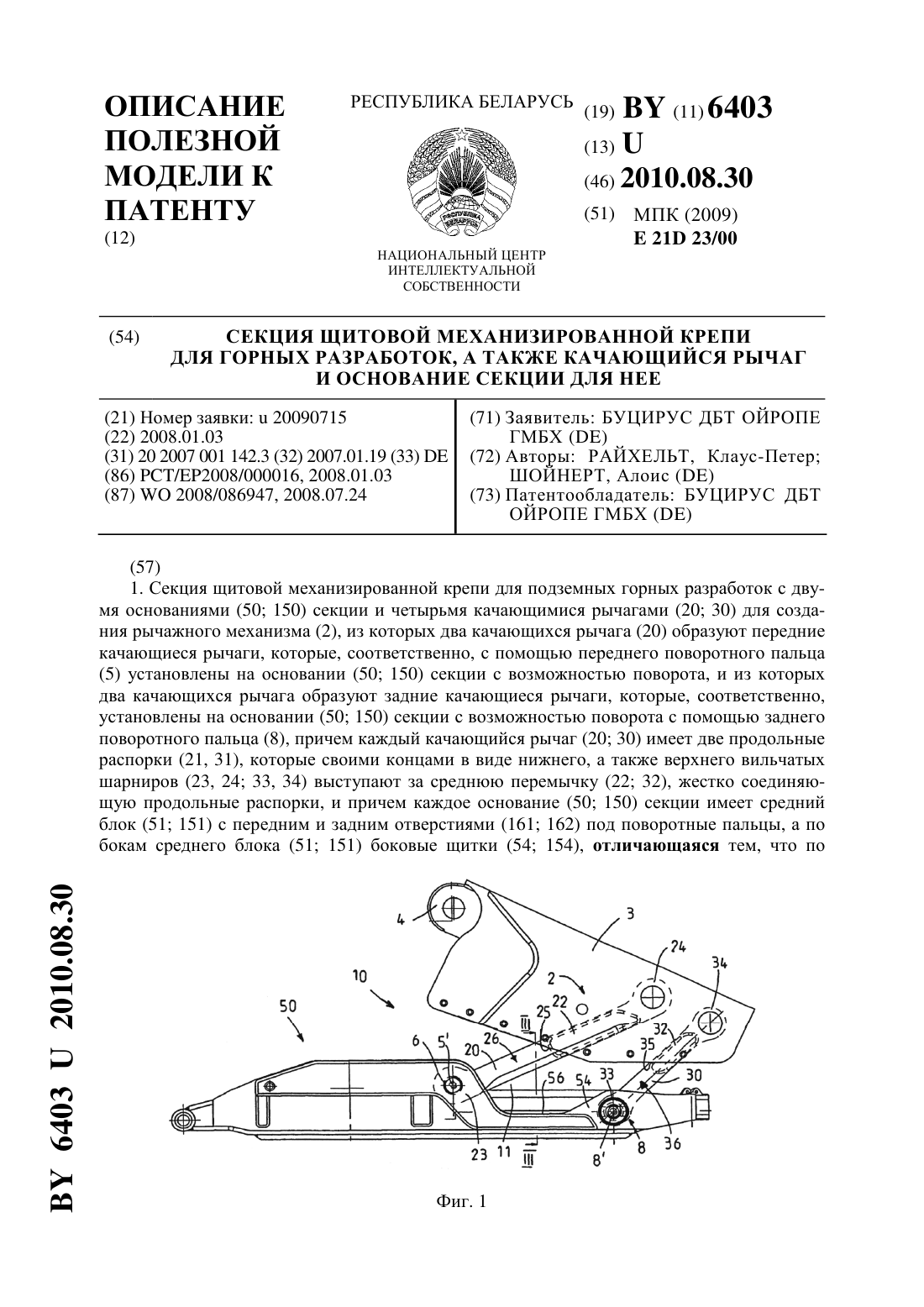
Номер патента: U 6403
Опубликовано: 30.08.2010
Авторы: РАЙХЕЛЬТ, Клаус-Петер, ШОЙНЕРТ, Алоис
МПК: E21D 23/00
Метки: разработок, также, механизированной, горных, качающийся, крепи, секции, основание, рычаг, нее, секция, щитовой
Текст:
...В одном из вариантов осуществления боковые щитки могут быть снабжены подобными окнам проточками или углублениями в качестве боковых проходов для отбитой породы,причем наклонные днища при этом, предпочтительно, оканчиваются в нижнем краю проточки с тем, чтобы обрушенная порода, сползающая сбоку по наклонному днищу, могла отводиться или вытесняться наружу через боковые щитки. В альтернативном варианте осуществления боковые щитки между...
Способ получения с помощью лазера тонко- и ультрадисперсных порошков, в частности, нанодисперсных, и установка для его реализации
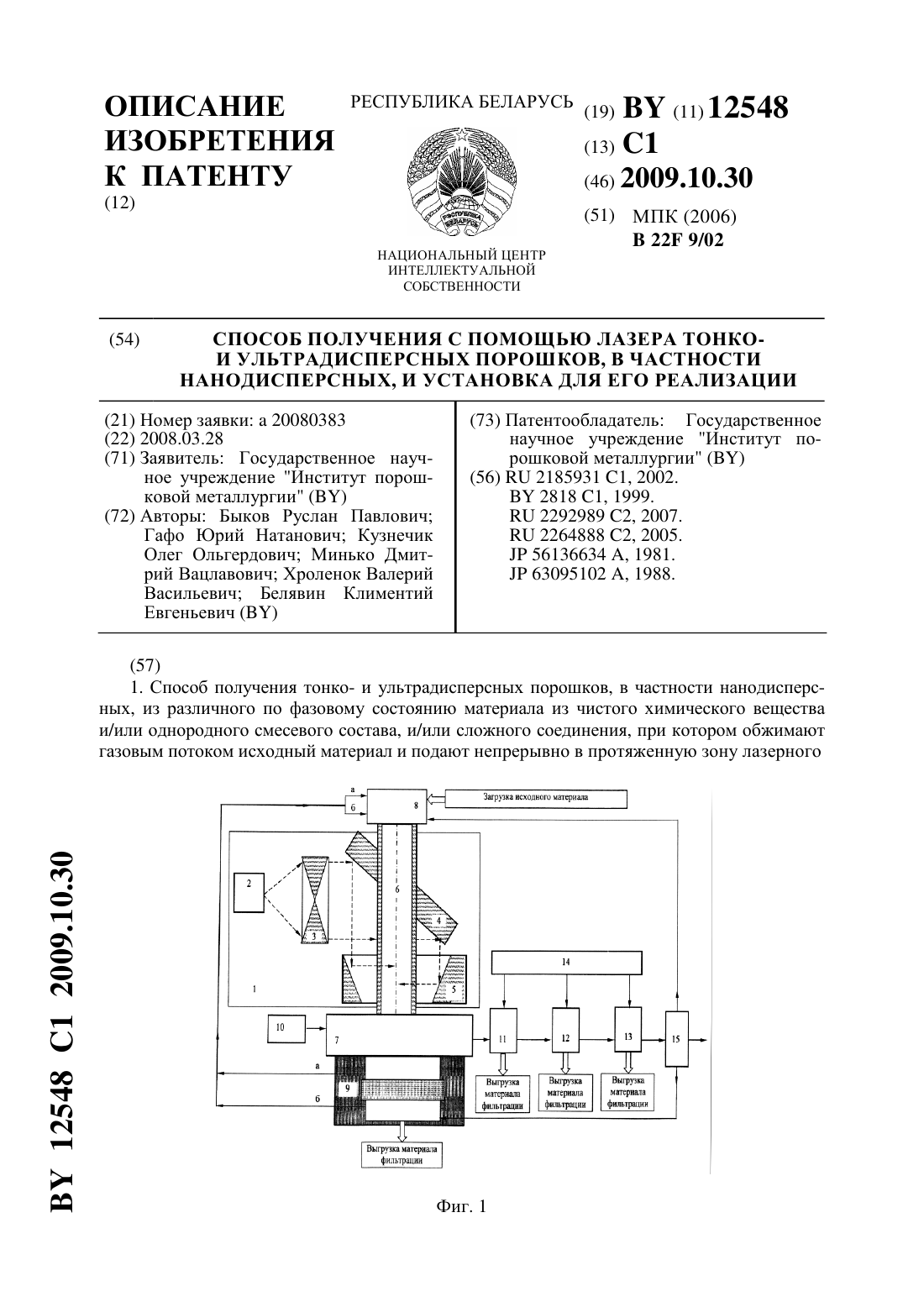
Номер патента: 12548
Опубликовано: 30.10.2009
Авторы: Хроленок Валерий Васильевич, Белявин Климентий Евгеньевич, Гафо Юрий Натанович, Кузнечик Олег Ольгердович, Минько Дмитрий Вацлавович, Быков Руслан Павлович
МПК: B22F 9/02
Метки: способ, частности, реализации, ультрадисперсных, лазера, нанодисперсных, тонко, получения, помощью, порошков, установка
Текст:
...газовый поток, пересекающий первый таким образом, что в зоне лазерного воздействия возникает область пониженного давления и при этом формируется объединенный газовый поток,направляющий на фильтрацию конденсируемое вещество, которое сортируют в защитной газовой или жидкостной среде на порошки грубой, тонкой, ультра- и нанодисперсной фракции, делят прошедший фильтрацию объединенный газовый поток на два очищенных,один из которых направляют...
Трансмиссионное устройство, в частности для транспортного средства, и способы управления этим устройством
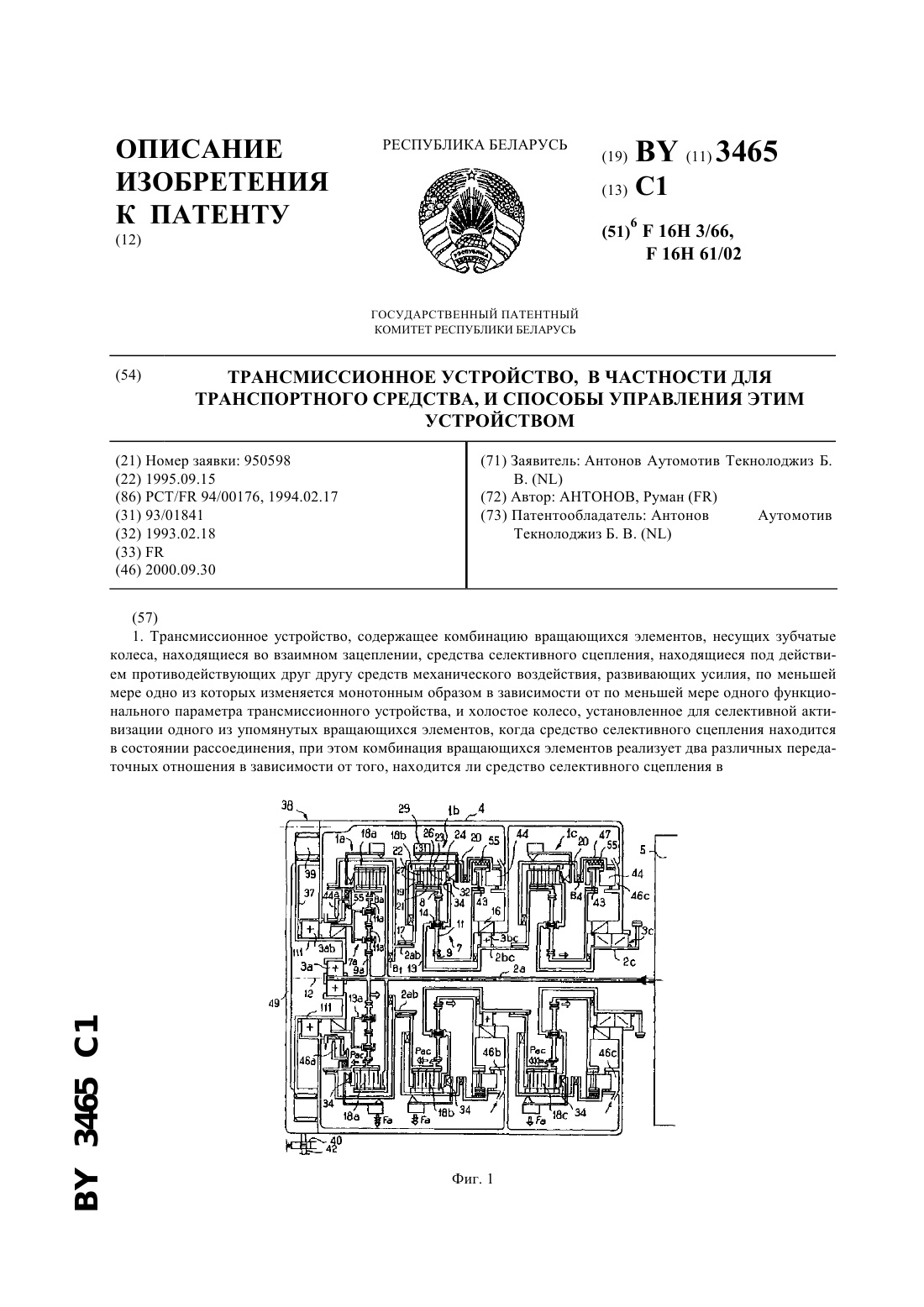
Номер патента: 3465
Опубликовано: 30.09.2000
Авторы: АНТОНОВ, Руман
МПК: F16H 61/02, F16H 3/66
Метки: трансмиссионное, управления, устройством, транспортного, устройство, средства, этим, способы, частности
Текст:
...слишком большой величиной. Зато можно практически реализовать по существу любое понижающее передаточное отношение, если в качестве входного звена использовать планетарное колесо, а в качестве выходного звена - зубчатый венец. Однако в этом случае упомянутый зубчатый венец вращается в направлении, противоположном направлению вращения планетарного колеса, что представляет собой коренной и неустранимый недостаток данного варианта, поскольку...
Ветроэнергетическая установка и способ управления отбором мощности ветрового потока
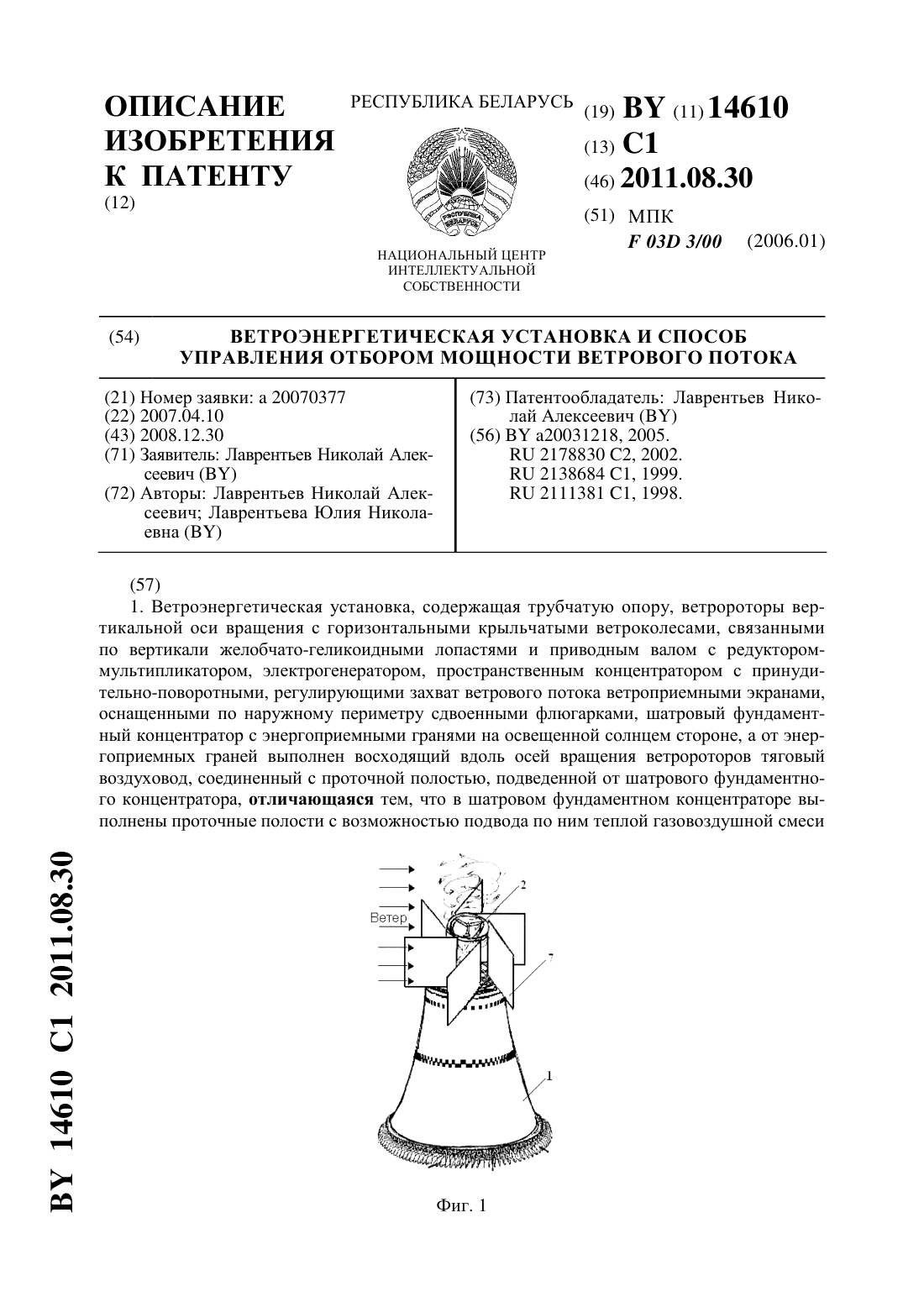
Номер патента: 14610
Опубликовано: 30.08.2011
Авторы: Лаврентьева Юлия Николаевна, Лаврентьев Николай Алексеевич
МПК: F03D 3/00
Метки: отбором, управления, потока, мощности, ветрового, способ, установка, ветроэнергетическая
Текст:
...сверху в трубчатой опоре в зоне взаимодействия захватываемого ветрового потока с восходящими геликоидными воздушными струями уплотненной паровоздушной смеси для регулирования интенсивности взаимодействия изменяют направление воздействия геликоидных воздушных струй ветроротора на обратное и направленное вниз, при этом в зоне, примыкающей снизу, создается нисходящий воздушный поток в виде опрокинутой вихревой воронки, насыщенной и искусственно...
Предыдущий патент: Комбинированная токопроводящая пряжа
Следующий патент: Способ получения самофлюсующегося порошка
Случайный патент: Состав для огнезащитной отделки нетканых синтетических, природных и смесовых материалов