Интеллектуальная система управления шумами
Номер патента: 9814
Опубликовано: 30.10.2007
Авторы: Фурунжиев Решат Ибраимович, Колешко Владимир Михайлович
Текст
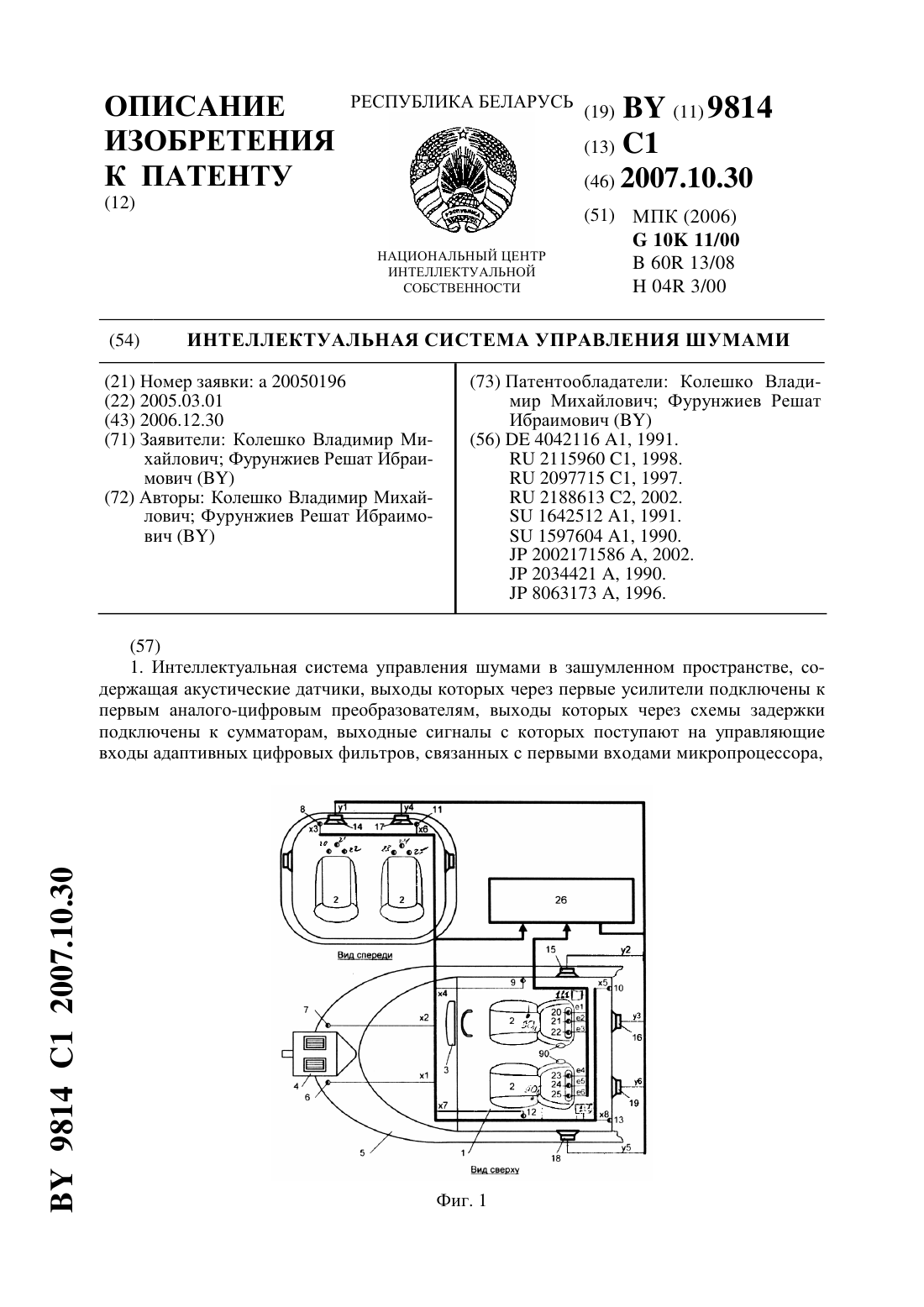
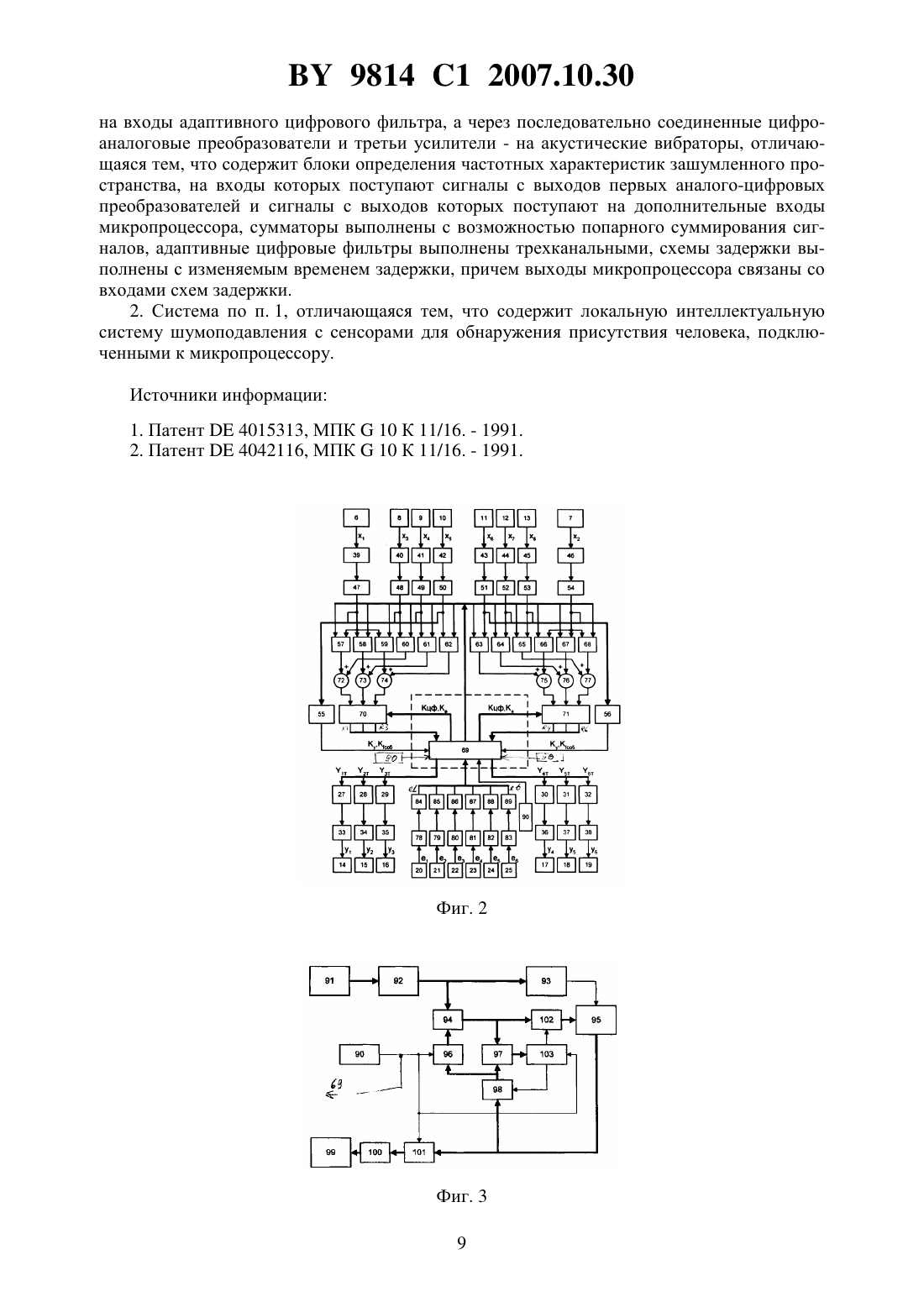
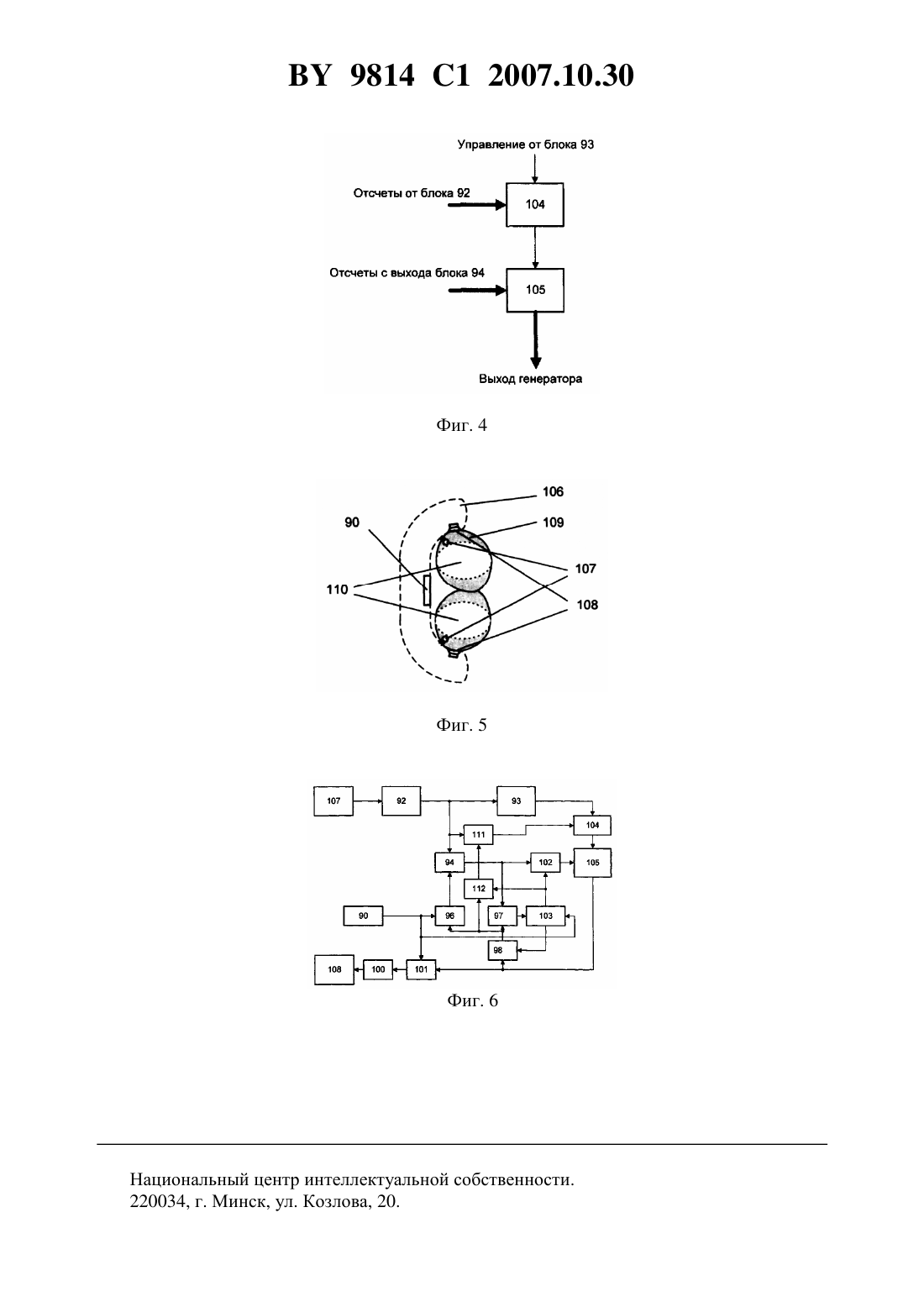
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ШУМАМИ(71) Заявители Колешко Владимир Михайлович Фурунжиев Решат Ибраимович(72) Авторы Колешко Владимир Михайлович Фурунжиев Решат Ибраимович(73) Патентообладатели Колешко Владимир Михайлович Фурунжиев Решат Ибраимович(57) 1. Интеллектуальная система управления шумами в зашумленном пространстве, содержащая акустические датчики, выходы которых через первые усилители подключены к первым аналого-цифровым преобразователям, выходы которых через схемы задержки подключены к сумматорам, выходные сигналы с которых поступают на управляющие входы адаптивных цифровых фильтров, связанных с первыми входами микропроцессора, Фиг. 1 9814 1 2007.10.30 на вторые входы которого поступают сигналы с выходов вторых аналого-цифровых преобразователей, на входы которых поступают электрические сигналы с выходов микрофонов через вторые усилители, при этом выходные сигналы с микропроцессора поступают на входы адаптивного цифрового фильтра, а через последовательно соединенные цифроаналоговые преобразователи и третьи усилители - на акустические вибраторы, отличающаяся тем, что содержит блоки определения частотных характеристик зашумленного пространства, на входы которых поступают сигналы с выходов первых аналого-цифровых преобразователей и сигналы с выходов которых поступают на дополнительные входы микропроцессора, сумматоры выполнены с возможностью попарного суммирования сигналов, адаптивные цифровые фильтры выполнены трехканальными, схемы задержки выполнены с изменяемым временем задержки, причем выходы микропроцессора связаны со входами схем задержки. 2. Система по п. 1, отличающаяся тем, что содержит локальную интеллектуальную систему шумоподавления с сенсорами для обнаружения присутствия человека, подключенными к микропроцессору. Изобретение относится к области обработки сигналов и акустики и может быть использовано в активных системах формирования акустической обстановки. Известно устройство Активная система снижения шума для салона автомобиля 1,которая содержит, датчики шумов (микрофоны), громкоговорители, и, по меньшей мере,одну схему регулирования, которая в качестве истинной величины принимает выходной сигнал датчиков шумов и передает на громкоговорители, регулирующие сигналы. Пространство со сниженным уровнем шумов находится под воздействием двух или более различно действующих подсистем. В таких подсистемах пространственное расстояние между громкоговорителями и микрофоном относительно мало (ближнее поле) или относительно велико (дальнее поле). Обрабатываемые схемой регулирования частоты для ближнего поля находятся выше, а частоты для дальнего поля - ниже характеристической граничной частоты шумовых воздействий. Обе подсистемы дополняют друг друга по своему режиму работы в соответствии с условиями расположения самого устройства в салоне автомобиля. Недостатком системы является ее неэффективность при необходимости перестройки характеристик генерируемого акустического поля в связи с изменениями характеристик шумовых воздействий от различных источников шума. Наиболее близкой по функциональным возможностям и техническому решению к предлагаемому устройству является Активная система управления шумами 2, содержащая большое число вибрационных датчиков, набор микрофонов, устройство управления,схемы задержки и набор громкоговорителей. Выходной сигнал вибрационного датчика добавляет непосредственное суммируемое приращение в устройство управления, которое далее охватывает схемы задержки для управления временем распространения соответствующего выходного сигнала вибрационного датчика, чтобы таким образом согласовать его со временем распространения сигналов от других датчиков. Выходные сигналы от микрофонов передаются в устройство управления на другие его входы независимо друг от друга, где происходит обработка всех поступивших входных сигналов по алгоритму наискорейшего спуска и выработка выходного сигнала состояния для громкоговорителей, которые производят управляющий тон так, что он интерферирует с шумом в позиции наблюдения. При этом источниками шумов являются внешние навесные механические узлы и агрегаты, находящиеся вне зоны расположения человека. Названная система управления шумами может быть применена в замкнутых пространствах, подобных пассажирским салонам средств передвижения, и может функционировать при условии, что отдельные наружные (навесные) источники шума производят акустические колебания, которые содержат основную наблюдаемую частоту 0 и ее высшие гармоники. 2 9814 1 2007.10.30 Основными недостатками этой системы являются невозможность подавления акустических шумов от нескольких источников шума с различными основными частотами отсутствие режима самонастройки устройства управления и схем задержки, что делает невозможным использование этой системы при изменяющихся условиях эксплуатации(замена механических узлов и агрегатов, установка дополнительного навесного оборудования и пр.) необходимость ручной настройки и переопределения параметров системы в случае установки этой системы в разнотипные средства передвижения и проведение индивидуального проектирования системы для разных замкнутых пространств (кабины/салона мобильной машины, самолета и пр.) невозможность обеспечить высокое качество подавления шумов при отсутствии точечной локализации источника шума, что делает неэффективной работу системы для подавления удаленных источников шумов и для подавления шумов, вызванных вибрацией крупных элементов пространственно-распределенных конструкций невозможность создать зону тишины вокруг головы человека, если он перемещается в пространстве относительно источников шума невозможность эффективной работы системы на открытом пространстве или в закрытых помещениях большого объема. Целью изобретения является создание интеллектуальной системы управления шумами с повышенным быстродействием для подавления или понижения уровня различных шумов в зашумленном пространстве в позиции наблюдения за счет формирования собственного акустического поля и его интерференции с шумами, создаваемыми одновременно несколькими источниками. Поставленная цель достигается тем, что предлагаемая интеллектуальная система управления шумами содержит датчики для определения физических величин шумов, распространяемых от источников шумов по направлению к позиции наблюдения микрофоны для измерения остаточного шума, который передается в позицию наблюдения схемы задержки, каждая из которых задерживает сигнал с соответствующего датчика таким образом, чтобы согласовать время обработки этого сигнала с временем распространения шума от датчика до позиции наблюдения и с временем передачи и обработки сигналов от других датчиков и сформировать противофазный сигнал в позиции наблюдения акустические вибраторы (громкоговорители, электродинамические головки и пр.) линейные предсказывающие фильтры вычислительные устройства корреляторы блоки автоматического обнаружения человека в зоне компенсации и включения системы вспомогательное оборудование для аналого-цифрового и цифро-аналогового преобразования сигналов, суммирования, усиления и формирования сигналов управляющее оборудование для формирования сигналов, подаваемых на акустические вибраторы независимо друг от друга так, что излучаемые ими акустические колебания интерферируют с колебаниями источников шумов, тем самым подавляя или понижая уровень шумов в позиции наблюдения блок определения основной собственной частоты салона кабины мобильной машины(автомобиля, самолета и др.). Существо изобретения поясняется с помощью рисунков. Рис. 1 - схематический вид предпочтительной формы интеллектуальной системы управления шумами для кабины мобильной машины (салона самолета и пр.). Рис. 2 - структурная схема управляющего оборудования предпочтительной формы интеллектуальной системы управления шумами для кабины. 3 9814 1 2007.10.30 Рис. 3 - структурная схема интеллектуальной системы подавления квазипериодических шумов. Рис. 4 - структурная схема варианта генератора компенсирующего сигнала. Рис. 5 - предпочтительная схема размещения в подголовнике сидения мобильной машины или механизма повышенной шумности элементов локальной автономной адаптивной системы подавления квазипериодических шумов. Рис. 6 - структурная схема локальной автономной адаптивной системы подавления квазипериодических шумов. На рис. 1 представлено акустическое пространство в виде кабины мобильной машины(салона самолета и пр.) (1) с собственной акустической частотной характеристикой ,имеющее расположенные внутри сиденья (2), а также панель приборов (3). Моторный шум создается двигателем (4), находящимся вне кабины, и при этом внутрь салона может проникать внешний шум, создаваемый вибрацией частей кабины, связанных с обтеканием воздушных потоков фонаря кабины и внешних навесных частей и агрегатов (5), расположенных снаружи. Датчики акустического поля (6)-(13) устанавливаются внутри самолета (к примеру, на стенках салона, возле вибрирующих устройств и пр.) и включают чувствительные вибрационные приемники. С датчиков снимаются электрические сигналы (х 1 х 8), которые отображают акустическое поле в районе расположения датчиков (вибрации стен кабины,шум двигателя и др.). Электрические сигналы (х 1 х 8) являются сигналами шумов и, в зависимости от расположения внутри салона, могут характеризовать суммарный шум, образуемый за счет сложения различных по природе шумов, создаваемых источниками шума. Внутри салона (1), который служит замкнутым акустическим пространством, устанавливаются акустические вибраторы (14 19) в таких местах, чтобы суммарная диаграмма направленности создаваемого ими акустического поля охватывала полностью позицию(позиции) наблюдения внутри салона, а оси их диаграмм направленности пересекались в центре позиции наблюдения под углами 90 градусов. Акустические вибраторы являются генераторами вторичного акустического поля, которое интерферируя с акустическими колебаниями источников шумов (первичное акустическое поле), создает акустическую обстановку внутри салона с пониженным или нулевым уровнем шумов в позиции (позициях) наблюдения, причем каждый из вибраторов компенсирует свою составляющую акустического поля. Внутри салона устанавливаются микрофоны (20 25), которые находятся в местах,определяющих позицию (позиции) наблюдения или зону (зоны) с пониженным или нулевым уровнем шумов. Каждый из микрофонов ориентирован в позиции наблюдения так,что ось его диаграммы направленности совпадает с соответствующей осью диаграммы направленности акустического вибратора, и предназначен для снятия величины осевой компоненты колебаний остаточного шума в позиции наблюдения. Управляющее оборудование (26) принимает шумовые сигналы (х 1 х 8) от датчиков(6 13) и сигналы снижения остаточного шума (е 1 е 6), которые передаются от микрофонов (20 25). Поступающие на вход управляющего оборудования сигналы (х 1 х 8,е 1 е 6) принимаются независимо друг от друга. Управляющее оборудование (26) формирует выходные сигналы управления акустическими вибраторами (у 1 у 6), которые поступают на вибраторы (14 19) независимо друг от друга для генерации акустического поля внутри салона (1). В зонах, где необходимо снизить уровень шумов, помещаются также автономные активные локальные системы (111 а, 111 б) подавления шумов и датчики (90 а, 90 б) присутствия человека. Предлагаемая система может работать в двух режимах режим самонастройки рабочий режим. При функционировании системы в режиме самонастройки (см. рис. 2) управляющее оборудование вырабатывает тестовые управляющие сигналы (у 1 Т у 6 Т), которые, посту 4 9814 1 2007.10.30 пая на цифроаналоговые преобразователи (ЦАП) (27 32), преобразуются в управляющие сигналы аналоговой формы и поступают на акустические вибраторы (14 19) соответственно через усилители мощности (33 38). При этом акустические вибраторы генерируют тестовый псевдошумовой сигнал в широком диапазоне частот звукового диапазона( ). Далее с выхода датчиков снимаются первичные шумовые сигналы (х 1 х 8), которые через усилители (39 46) и аналого-цифровые преобразователи (АЦП) (47 54) поступают на вход блоков определения акустической частотной характеристики салона (55, 56) и схемы задержки (57 68). На выходе блоков (55, 56) формируются коды, соответствующие акустической частотной характеристике салона, которые заносятся в память микропроцессора (69). На выходе последнего формируются управляющие сигналы (Ка), которые поступают на входы адаптивных цифровых фильтров (70, 71) и определяют вид их частотной характеристики с учетом резонансных частот салона и их высших гармоник. При этом первичные сигналы с выходов схем задержки поступают на сумматоры (7277), которые предназначены для попарного суммирования первичных сигналов и выработки обобщенных вторичных сигналов (х 1 х 6). Информация об обобщенных сигналах(х 1 х 6) подается на микропроцессор (69) через трехканальные адаптивные цифровые фильтры (70, 71). При этом микропроцессор (69) вырабатывает управляющие сигналы настройки схем задержки (57 68) независимо друг от друга, тем самым согласуя время распространения сигналов (х 1 х 8) со временем распространения акустических сигналов от акустических вибраторов (14 19) к датчикам (6 13). При функционировании системы в рабочем режиме акустический шум от различных источников шума принимается датчиками (6 13), которые формируют на своем выходе первичные сигналы (х 1 х 8), характеризующие акустическую обстановку внутри салона. Первичные сигналы непосредственно через усилители (39 46) поступают на входы аналого-цифровых преобразователей (47 54), которые преобразуют первичные аналоговые сигналы в цифровой код. Первичные сигналы (х 1 х 8) с выходов АЦП (47 54), через схемы задержки (57 68), поступают на сумматоры (72 77), для выработки обобщенных вторичных сигналов (х 1 х 6), характеризующих попарную сумму согласованных первичных сигналов (1 8). При этом с выходов АЦП (47 54) первичные сигналы поступают на входы блоков определения акустической частотной характеристики (55, 56),на выходе которых вырабатываются управляющие коды (Ку), которые поступают на входы микропроцессора (69) и характеризуют преобладающие частоты в шумовых сигналах. На основе управляющего кода (Ку) и кода акустической частотной характеристики салона (Кс), который был определен при работе системы в режиме самонастройки, микропроцессор формирует управляющие сигналы (Кцф) для настройки цифровых фильтров (70,71), а также управляющие сигналы для коррекции соответствующих значений задержки в элементах задержки (57 68). Управляющие сигналы (Кцф) с выхода микропроцессора (69) поступают на управляющие входы цифровых фильтров (70, 71), тем самым согласуя их частотные характеристики с акустической частотной характеристикой салона (с). Это вызывает преобладающую реакцию всей системы на те шумы, основная частота которых находится в окрестностях полюсов акустической частотной характеристики (с). Необходимость такой настройки обоснована тем, что при равных интенсивностях внешних шумов, внутри салона значительно усиливаются те шумы, для которых основные частоты равны либо близки к полюсам частотной характеристики (с) (явление резонанса). Последнее позволяет повысить быстродействие работы системы при тех же условиях за счет ее предварительной настройки на преобладающие составляющие шумов. Управляющие сигналы, поступающие на схемы задержки, позволяют изменять время задержки сигналов от датчиков акустического поля. Последнее необходимо для автоматической подстройки параметров системы при установке последней в салоне впервые. 5 9814 1 2007.10.30 Обобщенные вторичные сигналы (х 1 х 6) поступают на трехканальные адаптивные цифровые фильтры (70, 71), которые формируют на своих выходах относительные сигналы (1 6), соответствующие количеству комбинаций распределения сигналов между микрофонами и акустическими вибраторами для каждой из ортогональных компонент шумовых акустических колебаний в позициях наблюдения. Относительные сигналы(1 6) поступают на управляющие входы микропроцессора (69), при этом на другие его управляющие входы поступают сигналы (1 6), характеризующие величину остаточного шума в точке наблюдения, которые принимаются микрофонами (20 25)(рис. 1). Микропроцессор (69) непрерывно вырабатывает сигналы, которые поступают на управляющие входы адаптивных цифровых фильтров (70, 71) и определяют их весовые коэффициенты (Ка). На их вторые входы поступают обобщенные вторичные сигналы(х 1 х 6) с сумматоров (72 77). Работая по обобщенному алгоритму наименьших квадратов, адаптивные цифровые фильтры (70, 71) производят адаптивную обработку сигналов в каналах на основе установившихся на данный момент весовых коэффициентов (Ка). Сигналы с выходов адаптивных цифровых фильтров (70, 71) через микропроцессор(69) поступают на ЦАП (27 32) и преобразуются в аналоговую форму. Далее эти сигналы подаются на усилители мощности (33 38) и задают управляющие (подавляющие соответствующие компоненты шума) сигналы для вибраторов (14 19) независимо друг от друга. Акустическое поле, сформированное таким образом вибраторами, интерферирует с шумами в позиции (позициях) наблюдения, находящихся в пространстве размещения микрофонов (20 25), и образует суммарное акустическое поле с низким или нулевым уровнем шумов, что создает для человека более комфортные условия для его управления самолетом. При отсутствии человека в зоне подавления шумов генерирование противофазного сигнала не только бесполезно, но и вредно, так как при этом, как правило, возрастает общий уровень шумов за пределами этой зоны. Поэтому в системе используются специальные датчики (90) обнаружения присутствия человека в зоне подавления шумов. Управляющие сигналы с выходов этих датчиков поступают на управляющее оборудование (26),а именно на микропроцессор (69), и прекращают излучение звуковых противофазных сигналов в ту зону подавления шумов, где в данный момент человек отсутствует. Степень подавления шумов зависит от того, насколько полная информация об источниках шумов и акустических характеристиках помещения используется в системе. Однако на практике источники шума редко имеют точечную локализацию. Если источник шума распределен в пространстве, то для его компенсации необходимо использовать весьма сложную структуру адаптивного цифрового фильтра и обеспечивать высокое быстродействие микропроцессора для расчета его коэффициентов. Большинство реальных источников шума носят квазипериодический характер и имеют существенно неравномерный частотный спектр с хорошо выраженными полюсами и нулями. Такие источники шума достаточно просто поддаются математическому моделированию и прогнозированию. При этом для подавления таких шумов система может быть упрощена за счет исключения внешних датчиков шумов и коммуникаций с ними связанных. На рис. 3 представлена структурная схема интеллектуальной системы подавления квазипериодических шумов, содержащая трехкоординатный микрофон (91), трехканальный усилитель и АЦП (92), блок определения и прогнозирования параметров источника шума(93), трехканальный сумматор (94), трехканальный генератор компенсирующего сигнала(95), датчик обнаружения присутствия человека (90), коммутатор (96) компенсирующего сигнала, трехканальный коррелятор (97), адаптивный трехканальный цифровой фильтр(100), коммутатор компенсирующего сигнала (101), коммутатор (102) шумового сигнала и устройство управления (103). Тракты прохождения информационных сигналов на рис. 3 выделены утолщенными линиями. 6 9814 1 2007.10.30 Система (рис. 3) также работает в двух режимах режим самонастройки рабочий режим. В режиме самонастройки система находится при отсутствии человека в зоне подавления шумов, определяемом с помощью датчика обнаружения присутствия человека (90). По сигналу с этого датчика (90) коммутаторы (96, 101) разомкнуты, а коммутатор (102) замкнут. Сигналы шума с трехкоординатного микрофона (91), находящегося в зоне подавления шумов, усиливаются, преобразуются в цифровые коды в трехканальном усилителе и АЦП (92) и поступают на вход блока определения и прогнозирования параметров источника шума (93). Блок (93) определяет период (или частоту основного тона) источника шума и эффективную ширину спектра и устанавливает количество выборок на периоде и частоту выборок генератора компенсирующего сигнала (95) с помощью сигналов, подаваемых на управляющий вход генератора (95). Одновременно на информационный вход генератора (95) через сумматор (94) и коммутатор (102) поступают коды выборок шумового сигнала с выхода АЦП (92) и периодически подстраивают форму компенсирующего сигнала генератора (95). Сигналы с выхода генератора (95) поступают на вход коммутатора (101) и, одновременно, через трехканальный адаптивный цифровой фильтр (98), эмулирующий тракт прохождения компенсирующего сигнала от излучателей к микрофонам, поступают на вход коммутатора (96) и первый вход коррелятора (97), на второй вход которого поступают коды выборок шумового сигнала с выхода сумматора (94). Коммутаторы (96) и (101) разомкнуты. Выходной сигнал коррелятора (97) поступает на вход устройства управления(103), которое управляющими сигналами, поступающими на управляющий вход фильтра(98) осуществляет подстройку параметров фильтра (98) по наилучшему совпадению формы шумового и компенсирующего сигналов. При обнаружении датчиком (90) присутствия человека система переходит в рабочий режим, при этом коммутаторы (94) и (101) замыкаются, а коммутатор (102) размыкается. Генератор (95) переходит в автономный режим работы и его выходной сигнал через коммутатор (101) поступает на трехканальный ЦАП и усилитель мощности (100) и далее излучается в зону подавления излучателями (99) в противофазе с шумовым сигналом. Нескомпенсированный остаток шума через микрофон (91) и АЦП (92) поступает на первый вход сумматора (94), на второй вход которого через коммутатор (96) поступает компенсирующий сигнал генератора (95), и на выходе сумматора (94) восстанавливается исходный шумовой сигнал источника шума, который продолжает поступать на первый вход коррелятора (97), сохраняя непрерывность подстройки параметров фильтра (98). Блок (93) по нескомпенсированному остатку шума продолжает непрерывно определять его период и,при необходимости, в небольших пределах корректировать амплитуду и форму сигнала генератора (95). В случае значительного изменения параметров источника шума и рассогласования их с параметрами компенсирующего сигнала на выходе генератора (95), по сигналу рассогласования на выходе коррелятора (97) устройство управления (103) на короткое время (несколько десятков отсчетов) замыкает коммутатор (102) и форма сигнала генератора (95) корректируется сигналами восстановленного шума до достижения согласованности, после чего коммутатор (102) размыкается. Если в качестве критерия согласованности параметров источника шума и генератора компенсирующего сигнала принять минимум функции риска (, у), где- множество состояний генератора (95), а у - множество оценок состояний источника шума, а сама функция задается в виде суммы квадратов разностей соответствующих состояний генератора и источника, то генератор (95) может быть выполнен в виде последовательно соединенных устройства параметрической оптимизации на основе алгоритма наименьших квадратов(104) и адаптивного линейного предсказывающего фильтра с обратной связью (105) (см. рис. 4). При этом используется то, что разность между отсчетами сигналов шума и компенсирующего генератора (95) уже содержится в сигналах на выходе АЦП (92). 7 9814 1 2007.10.30 В некоторых практически важных случаях можно ограничиться подавлением шума в локальной области, непосредственно примыкающей к области слуховых органов человека. При этом можно использовать особенность органов слуха, связанную с отсутствием у них векторной чувствительности к звуковым колебаниям, и упростить структуру системы подавления за счет одноканальной адаптивной обработки сигналов шума. Предпочтительная схема размещения элементов локальной автономной активной адаптивной системы подавления шумов приведена на рис. 5, где в подголовнике сидения транспортного средства или механизма повышенной шумности размещены датчик обнаружения присутствия человека (90), микрофоны с круговой диаграммой направленности и акустические излучатели(108) с диаграммами направленности (109). Акустические колебания, излучаемые излучателями (108) в противофазе шумовым колебаниям, образуют зону компенсации шумов (110). Структурная схема локальной автономной адаптивной системы подавления квазипериодических шумов приведена на рис. 6. Система состоит из микрофона (107) с круговой диаграммой направленности, усилителя и АЦП (92), блока определения и прогнозирования параметров источника шума (93), сумматоров (94) и (111), коммутаторов (96), (101),(102), (112), коррелятора (97), адаптивного цифрового фильтра (98), ЦАП и усилителя мощности (100), устройства управления (103), устройства оптимизации на основе алгоритма наименьших квадратов (104), адаптивный предсказывающий фильтр (105) и акустический излучатель (108). В режиме самонастройки при отсутствии человека в зоне подавления шумов коммутаторы (96) и (101) разомкнуты, а коммутаторы (102) и (112) замкнуты. Сигнал шумовых колебаний с выхода микрофона (107), усиленный и преобразованный в последовательность отсчетов в АЦП (92), поступает на вход блока (93) и первые входы сумматоров (94) и (111). На второй вход сумматора (111) поступает сигнал компенсации шума с выхода адаптивного предсказывающего фильтра (105) через последовательно соединенные адаптивный фильтр (98) и коммутатор (112). Разностный сигнал нескомпенсированного остатка поступает на вход устройства оптимизации (104), которое по алгоритму наименьших квадратов корректирует параметры предсказывающего фильтра (105) таким образом, чтобы уменьшить до минимума суммарное значение квадратов отсчетов разностного сигнала,поступающих на его вход. При появлении человека сигналом с датчика (90) система переходит в рабочий режим. Коммутаторы (96) и (101) замыкаются, а коммутаторы (102) и (112) - размыкаются. Сигнал компенсации с выхода фильтра (105) через замкнутый коммутатор (101) и ЦАП (100) поступает на излучатель (108) и излучается в зону подавления (110). Разностный сигнал с выхода микрофона (107) через АЦП (92) продолжает поступать на вход устройства (104) через сумматор (111) и на первый вход сумматора (94), на второй вход которого через фильтр (98) и коммутатор (96) поступает сигнал компенсации. С выхода сумматора (94) восстановленный шумовой сигнал через замкнутый коммутатор (102) продолжает поступать на вход предсказывающего фильтра (105). Восстановленный шумовой сигнал и сигнал компенсации поступают на первый и второй входы коррелятора (97), выходной сигнал которого поступает на вход устройства управления (103) и устройство (103) корректирует параметры фильтра (98) по наилучшему совпадению формы шумового и компенсирующего сигналов. Резюмируя сказанное выше, предлагается 1. Интеллектуальная система управления шумами в зашумленном пространстве, содержащая акустические датчики, выходы которых через первые усилители подключены к первым аналого-цифровым преобразователям, выходы которых через схемы задержки подключены к сумматорам, выходные сигналы с которых поступают на управляющие входы адаптивных цифровых фильтров, связанных с первыми входами микропроцессора,на вторые входы которого поступают сигналы с выходов вторых аналого-цифровых преобразователей, на входы которых поступают электрические сигналы с выходов микрофонов через вторые усилители, при этом выходные сигналы с микропроцессора поступают 8 9814 1 2007.10.30 на входы адаптивного цифрового фильтра, а через последовательно соединенные цифроаналоговые преобразователи и третьи усилители - на акустические вибраторы, отличающаяся тем, что содержит блоки определения частотных характеристик зашумленного пространства, на входы которых поступают сигналы с выходов первых аналого-цифровых преобразователей и сигналы с выходов которых поступают на дополнительные входы микропроцессора, сумматоры выполнены с возможностью попарного суммирования сигналов, адаптивные цифровые фильтры выполнены трехканальными, схемы задержки выполнены с изменяемым временем задержки, причем выходы микропроцессора связаны со входами схем задержки. 2. Система по п. 1, отличающаяся тем, что содержит локальную интеллектуальную систему шумоподавления с сенсорами для обнаружения присутствия человека, подключенными к микропроцессору. Источники информации 1. Патент 4015313, МПК 10 К 11/16. - 1991. 2. Патент 4042116, МПК 10 К 11/16. - 1991. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 10
МПК / Метки
МПК: H04R 3/00, B60R 13/08, G10K 11/00
Метки: шумами, интеллектуальная, система, управления
Код ссылки
<a href="https://by.patents.su/10-9814-intellektualnaya-sistema-upravleniya-shumami.html" rel="bookmark" title="База патентов Беларуси">Интеллектуальная система управления шумами</a>
Цифровая система управления
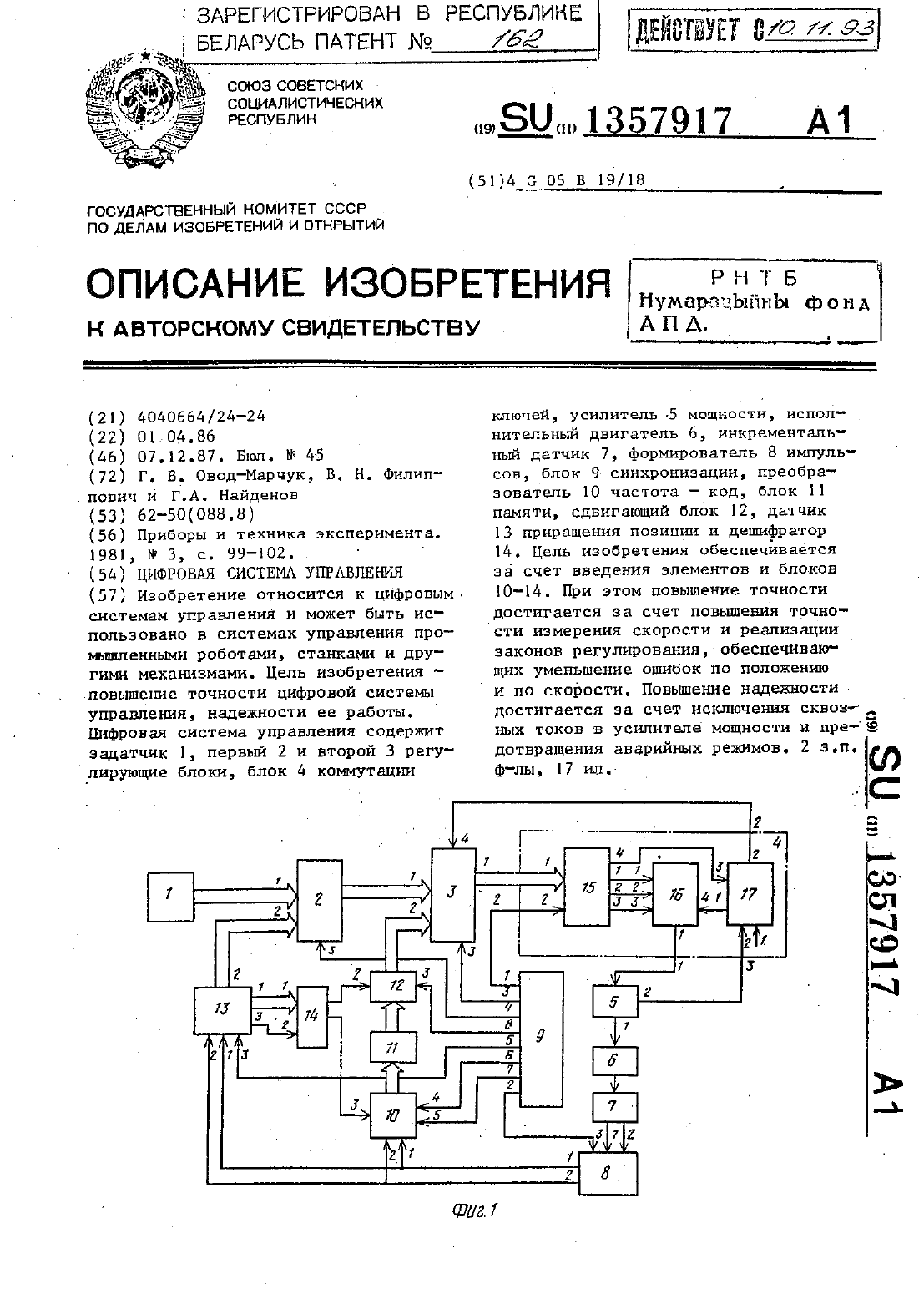
Номер патента: 162
Опубликовано: 30.09.1994
Авторы: Овод-Марчук Г. В., Филиппович В. Н., Найденов Г. А.
МПК: G05B 19/18
Метки: система, цифровая, управления
Текст:
...выходов (например, на первом)-формирователн 8 ньшульсов появляются позиционные импульсы (фиг. 7 В. Каждьт позиционный импульс изменяет на единицу содержимое третьего счетчика 37 датчика 13 приращения позиции(фиг. 7 С). Первый дешифратор 1 дформпрует на первом выходе разрешающий сигнал,-а на втором выходе - импульсной сигнал (фиг. 7 П), если текущий код на выходе третьего счетчика 37 равен Ы, 2, п 0,1,2, .на второй вход сдвигающего блока...
Система управления манипуляторами с контуром управления по силе
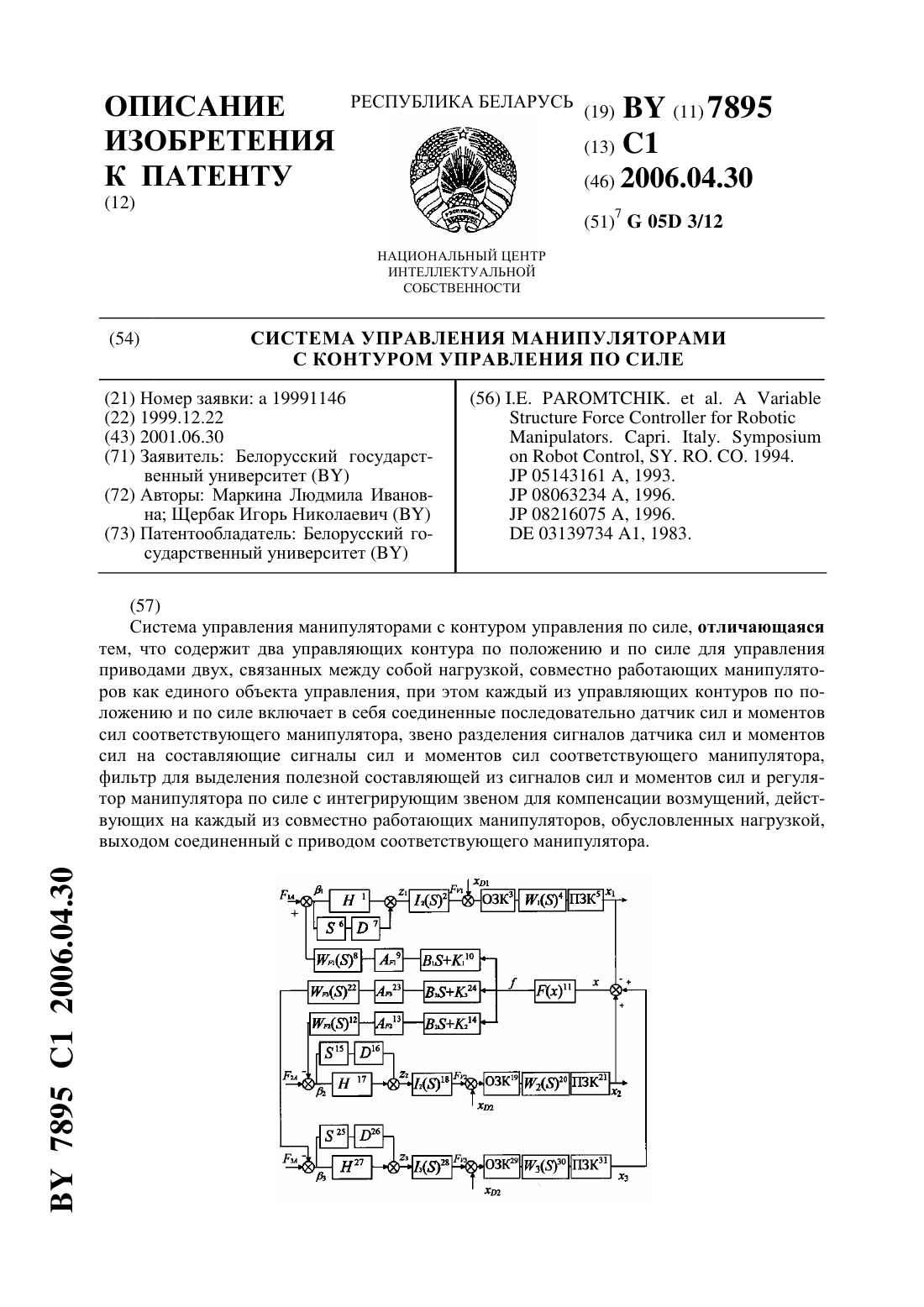
Номер патента: 7895
Опубликовано: 30.04.2006
Авторы: Щербак Игорь Николаевич, Маркина Людмила Ивановна
МПК: G05D 3/12
Метки: управления, система, контуром, силе, манипуляторами
Текст:
...манипулятором, например шестизвенным, могут быть монотонными и его передаточная матричная функция может быть представлена как 1 11. 6111 21 Для построения системы управления манипуляторами с контуром управления по силе помимо модели манипулятора требуется модель датчика сил и моментов, встроенного в схват. Передаточная матричная функция датчика сил и моментов может быть представлена в виде 11 ,22 , , 66.(3) Для преобразования ряда...
Система управления и контроля параметров газотурбинного двигателя
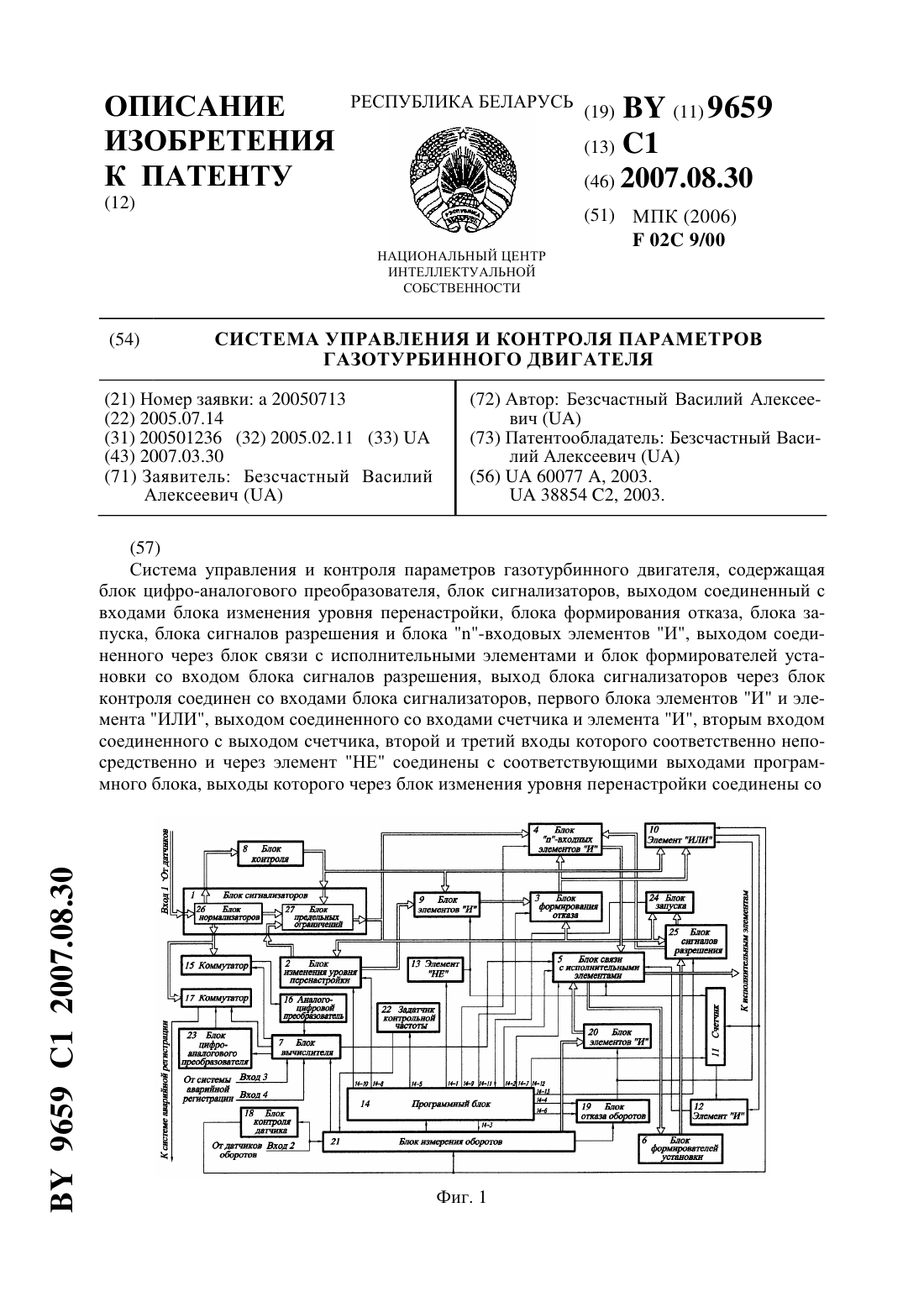
Номер патента: 9659
Опубликовано: 30.08.2007
Автор: Безсчастный Василий Алексеевич
МПК: F02C 9/00
Метки: управления, газотурбинного, параметров, контроля, двигателя, система
Текст:
...с исполнительными элементами и счетчика 11. Блок 25 сигналов разрешения выдает сигналы на блок 24 запуска, которые разрешают запуск программного блока 14 при появлении на выходе блока 1 сигналов, которые свидетельствуют о достижении параметрами двигателя предельных значений и сигналы на блок 4 -входовых элементов И, которые запрещают его работу. При работающем двигателе сигналы от датчиков поступают в блок 26 нормализаторов блока 1...
Система управления и контроля параметров газотурбинного двигателя
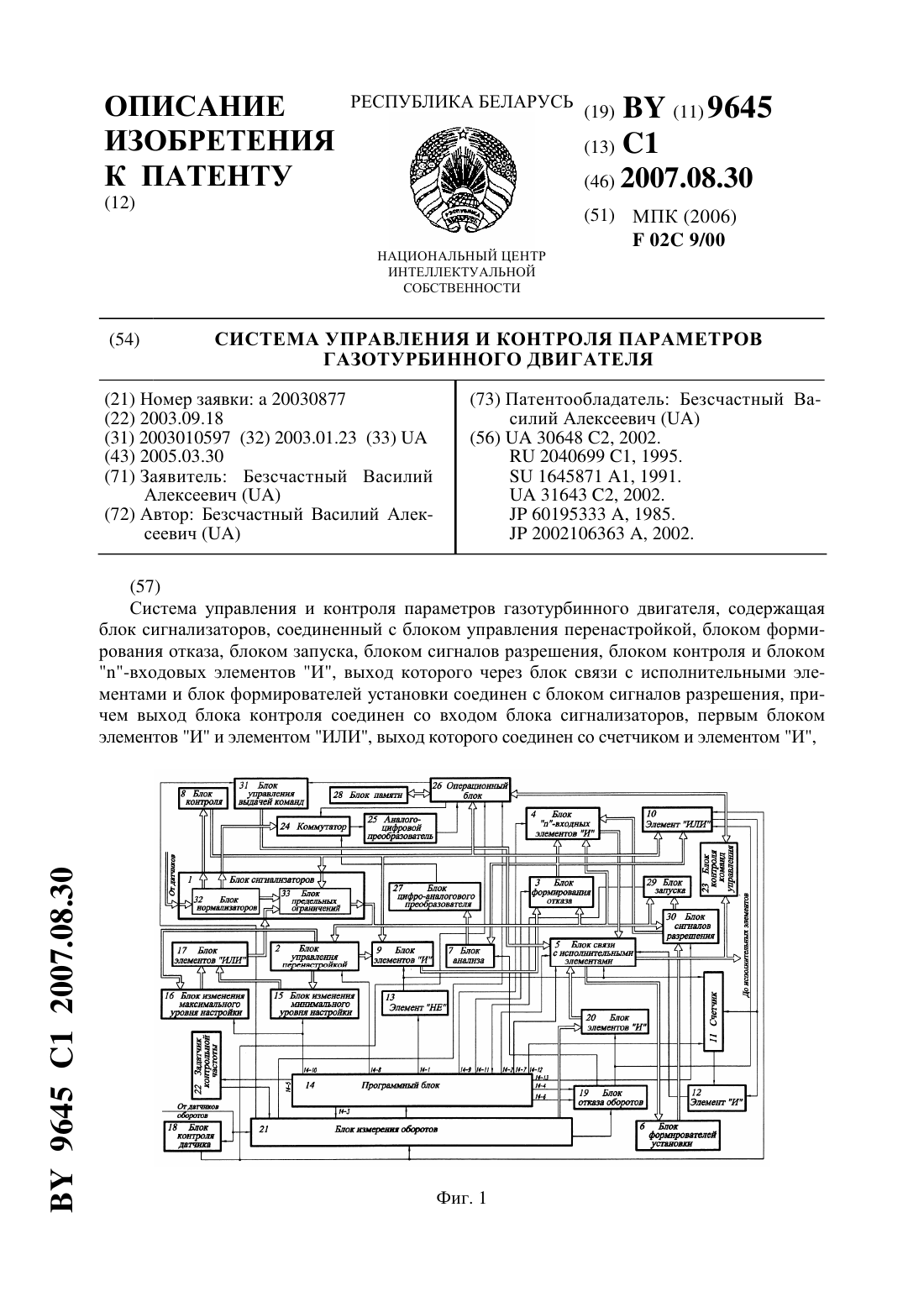
Номер патента: 9645
Опубликовано: 30.08.2007
Автор: Безсчастный Василий Алексеевич
МПК: F02C 9/00
Метки: контроля, двигателя, управления, параметров, система, газотурбинного
Текст:
...датчика и предотвращает выдачу команд из блока 21 при проведении самоконтроля. Контрольная частота из задатчика 22 обеспечивает фиксацию всех измеряемых уровней оборотов блоком 21. Если блок 21 измерения оборотов исправный, то он не выдает сигнал на блок 19 отказа оборотов. При наличии неисправностей в тракте блока 21 он выдает на блок 19 отказа оборотов сигнал,который обеспечит фиксацию отказа при поступлении сигналов из блока 14. С...
Следящая система автоматического управления с компенсацией неизмеряемых скачкообразных возмущений
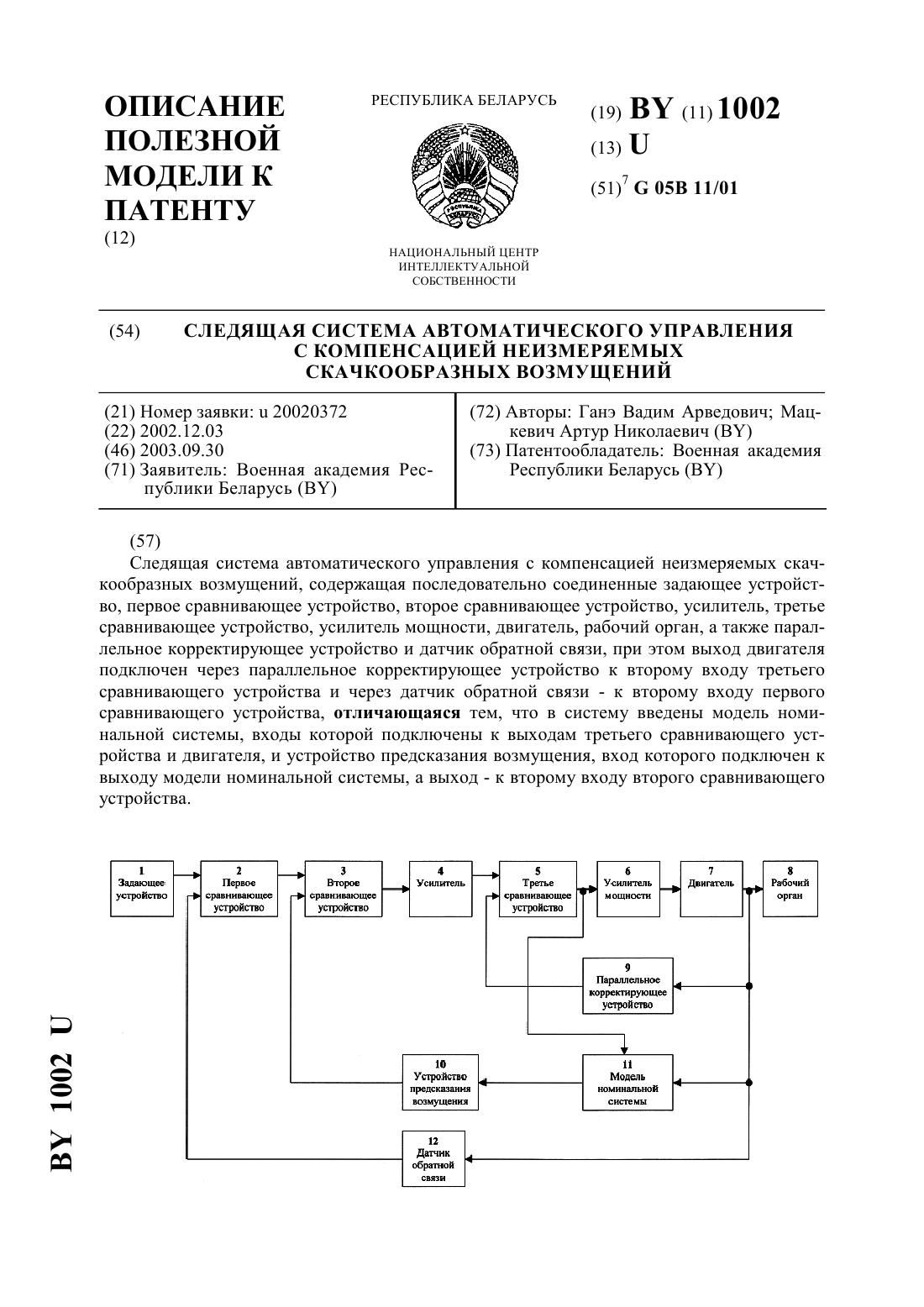
Номер патента: U 1002
Опубликовано: 30.09.2003
Авторы: Мацкевич Артур Николаевич, Ганэ Вадим Арведович
МПК: G05B 11/01
Метки: управления, неизмеряемых, возмущений, компенсацией, следящая, скачкообразных, автоматического, система
Текст:
...второму входу первого сравнивающего устройства, и отличается от прототипа тем, что в систему введены модель номинальной системы, входы которой подключены к выходам третьего сравнивающего устройства и двигателя, и устройство предсказания возмущения, вход которого подключен к выходу модели номинальной системы, а выход - к второму входу второго сравнивающего устройства. На фигуре представлена функциональная схема ССАУ с компенсацией неизмеряемых...
Предыдущий патент: Способ проводниковой блокады надлопаточного нерва
Следующий патент: Способ получения нетканого полотна
Случайный патент: Способ термозвуковой микросварки