Способ построения опорного кадра для детектирования динамических объектов в системе видеонаблюдения
Номер патента: 11702
Опубликовано: 30.04.2009

Текст
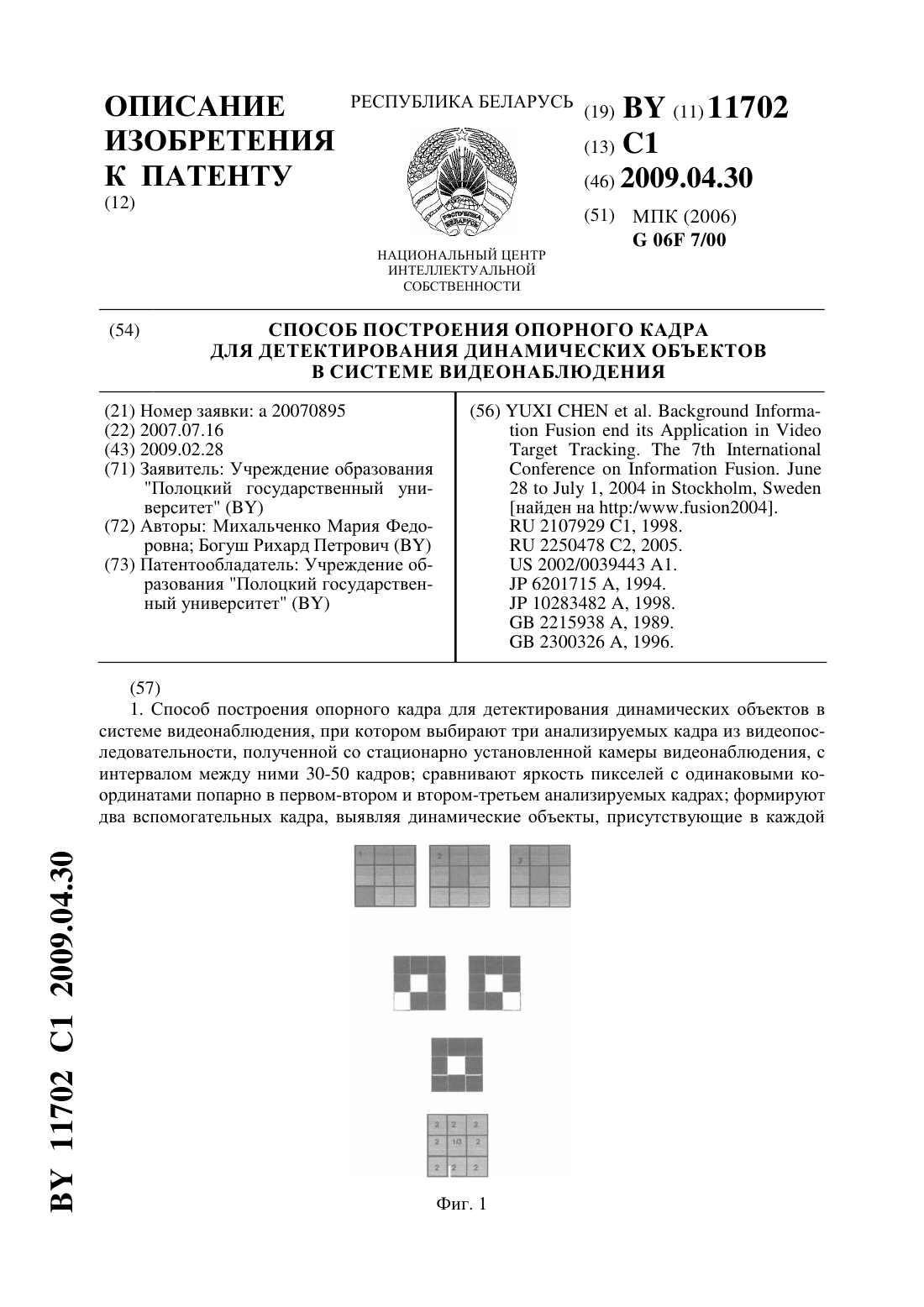
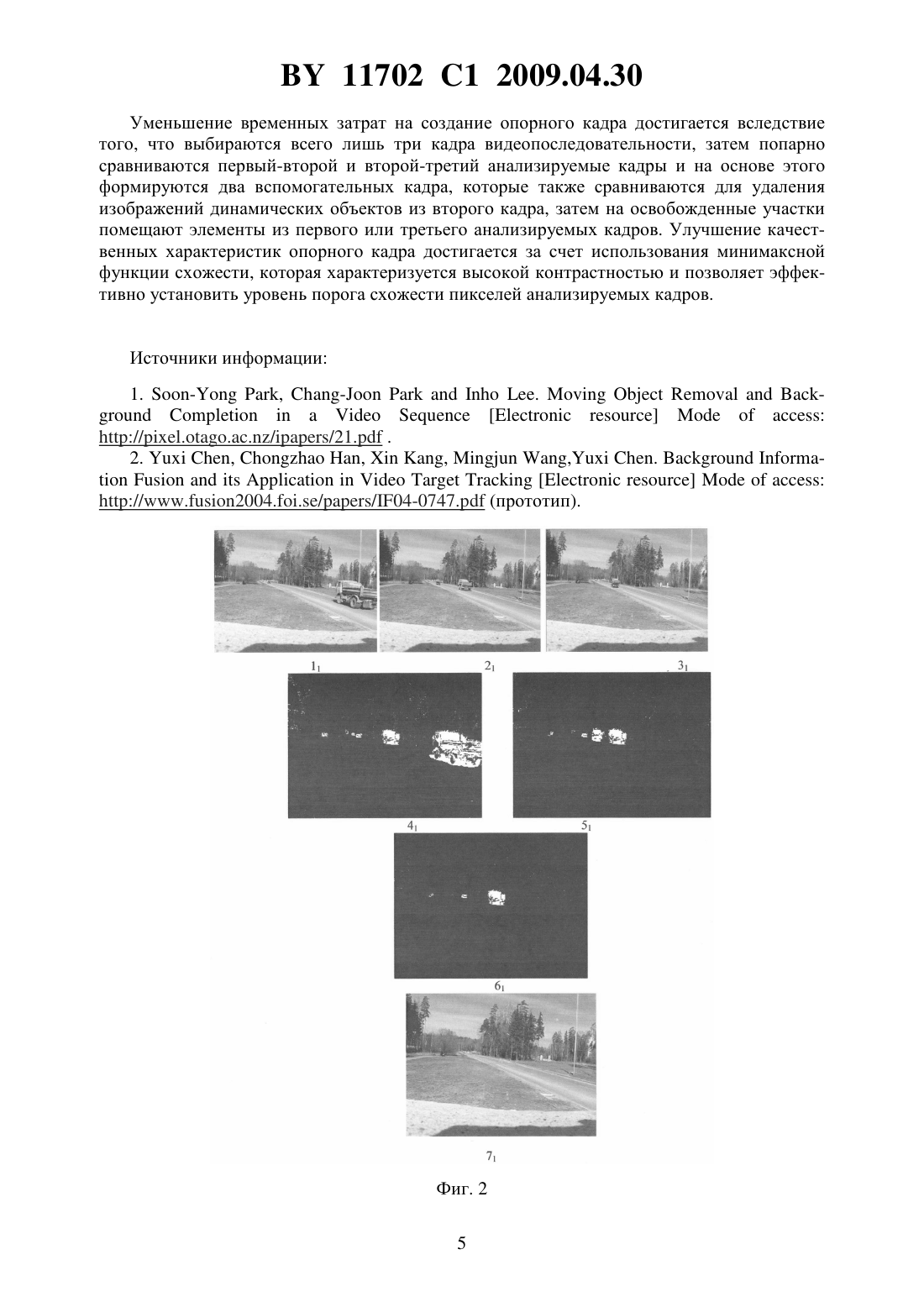
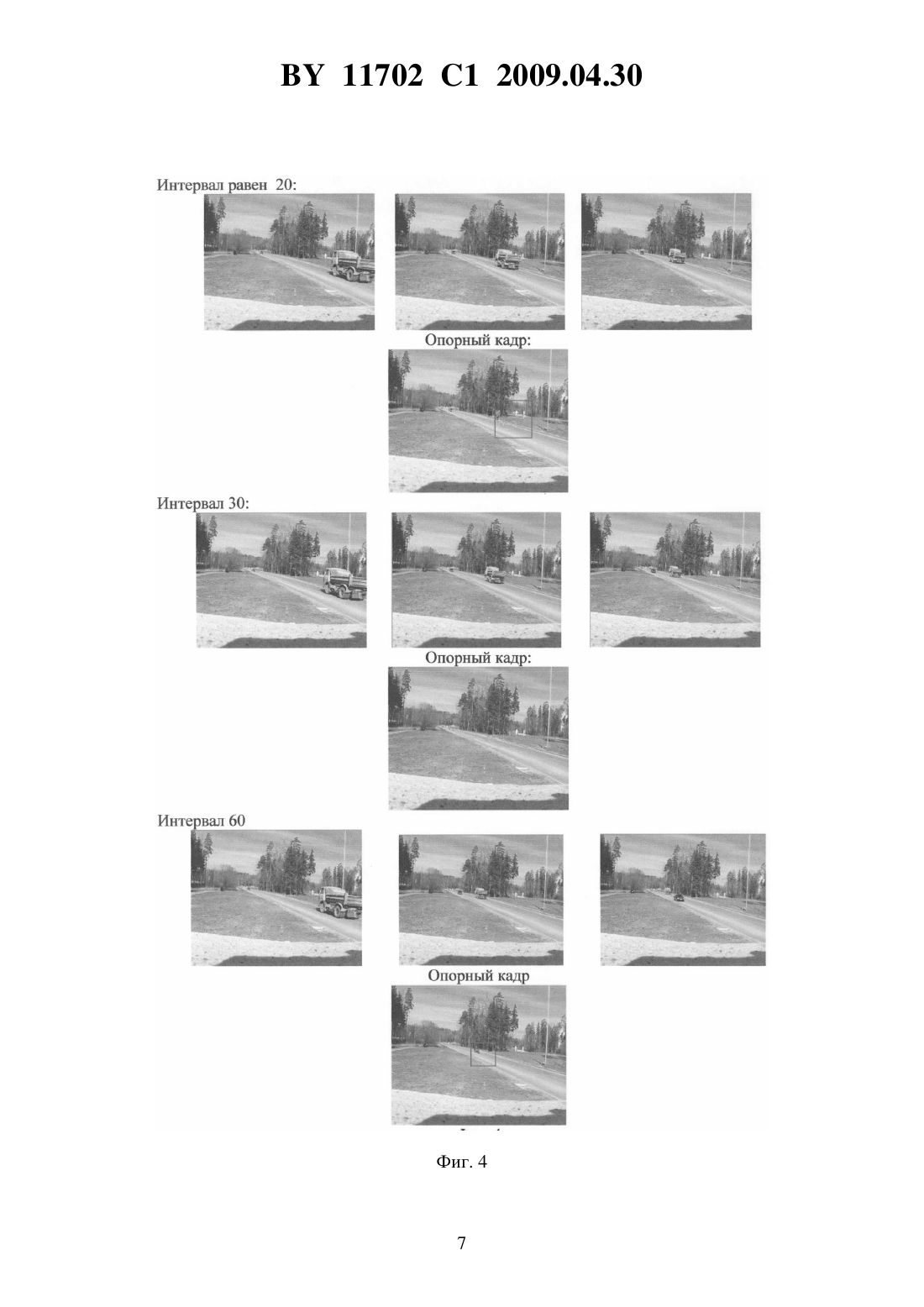
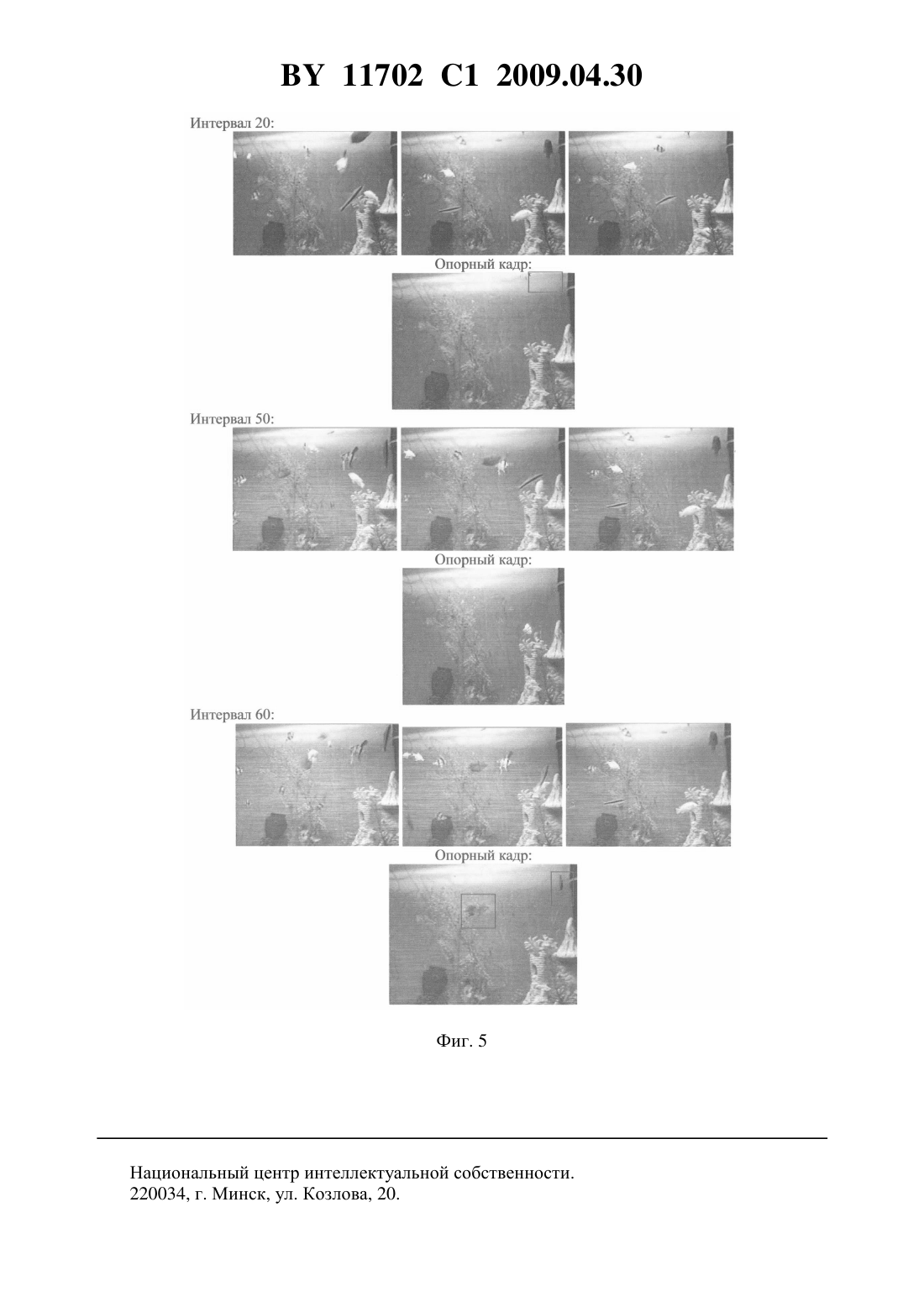
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ПОСТРОЕНИЯ ОПОРНОГО КАДРА ДЛЯ ДЕТЕКТИРОВАНИЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ В СИСТЕМЕ ВИДЕОНАБЛЮДЕНИЯ(71) Заявитель Учреждение образования Полоцкий государственный университет(72) Авторы Михальченко Мария Федоровна Богуш Рихард Петрович(73) Патентообладатель Учреждение образования Полоцкий государственный университет(57) 1. Способ построения опорного кадра для детектирования динамических объектов в системе видеонаблюдения, при котором выбирают три анализируемых кадра из видеопоследовательности, полученной со стационарно установленной камеры видеонаблюдения, с интервалом между ними 30-50 кадров сравнивают яркость пикселей с одинаковыми координатами попарно в первом-втором и втором-третьем анализируемых кадрах формируют два вспомогательных кадра, выявляя динамические объекты, присутствующие в каждой 11702 1 2009.04.30 паре анализируемых кадров сравнивают полученные вспомогательные кадры и формируют еще один вспомогательный кадр, выявляя все динамические объекты второго анализируемого кадра удаляют изображения всех динамических объектов из второго анализируемого кадра помещают на освобожденные участки элементы изображений с первого или третьего анализируемых кадров с такими же координатами и аналогичных размеров полученный в результате кадр принимают как опорный. 2. Способ по п. 1, отличающийся тем, что для цветных изображений попарное сравнение анализируемых кадров осуществляют отдельно для каждой цветовой составляющей цветового пространства, и перед удалением из второго кадра изображений всех динамических объектов создают общую маску динамических объектов второго кадра путем выявления всех совпадающих пикселей цветовых компонент. Заявляемое изобретение относится к области радиотехники и может быть использовано в системах видеонаблюдения, в которых осуществляется детектирование динамических объектов. Известен способ построения опорного кадра для автоматического обнаружения динамических объектов в системах видеонаблюдения 1, включающий последовательность следующих действий выбирают два кадра видеопоследовательности, полученные с использованием движущейся в пространстве камеры определяют различия между пикселями этих кадров с использованием вычисления суммы квадратов разностей для окна размером 77 пикселей определяют ошибку вычисления суммы квадратов разностей с использованием окна 33 пикселя находят все совпадения между двумя кадрами и удаляют ошибочные пиксели выявляют динамические объекты, задают область поиска динамического объекта обнаруживают динамический объект с использованием нормализованной корреляционной функции удаляют фрагмент кадра, соответствующий динамическому объекту, и заполняют этот фрагмент соответствующим фрагментом другого кадра, на котором отсутствует динамический объект полученный кадр принимают как опорный. Недостатками известного способа являются необходимость в значительных вычислительных ресурсах и сложность реализации последовательности действий для построения опорного кадра. В качестве прототипа выбран способ построения опорного кадра для детектирования динамических объектов в систему видеонаблюдения 2, включающий в себя последовательность действий задают две величины коэффициент, обусловливающий быстродействие и качество алгоритма построения опорного кадра, и порог, указывающий допустимое отклонение значения уровня яркости пикселя выбирают 15-30 анализируемых кадров видеопоследовательности стационарно установленной камеры, интервал между кадрами, в среднем, составляет 4 кадра определяют соответствие уровней яркости пикселей с одинаковыми координатами для каждого анализируемого кадра определяют номер кадра путем вычисления максимального значения количества совпавших пикселей формируют вспомогательный кадр сравнивают полученное значение номера кадра с коэффициентом при значении номера кадра больше установленного коэффициента - элементу вспомогательного кадра присваивают пиксель изображения вычисленного номера кадра 2 11702 1 2009.04.30 построение опорного кадра осуществляют попиксельным заполнением вспомогательного кадра заполненный вспомогательный кадр принимают как опорный. Недостатком прототипа являются необходимость в значительных вычислительных ресурсах, наличие шумов в опорном кадре, которые проявляются в виде частичных объектов и пустот. Задачей изобретения является сокращение вычислительных ресурсов на построение опорного кадра, улучшение качественных характеристик опорного кадра и, за счет этого,повышение эффективности детектирования динамических объектов в системах видеонаблюдения в целом. Поставленная задача решается тем, что в способ построения опорного кадра для детектирования динамических объектов в системе видеонаблюдения включены следующие операции выбирают три анализируемых кадра из видеопоследовательности, полученной со стационарно установленной камеры видеонаблюдения, с интервалом между ними 30-50 кадров сравнивают яркость пикселей с одинаковыми координатами попарно в первом-втором и втором-третьем анализируемых кадрах формируют два вспомогательных кадра, выявляя динамические объекты, присутствующие в каждой паре анализируемых кадров сравнивают полученные вспомогательные кадры выявляя все динамические объекты второго анализируемого кадра удаляют изображения всех динамических объектов из второго анализируемого кадра помещают на освобожденные участки элементы изображений с первого или третьего анализируемых кадров с такими же координатами и аналогичных размеров полученный в результате кадр принимают как опорный. Для цветных изображений попарное сравнение анализируемых кадров осуществляют отдельно для каждой цветовой составляющей выбранного цветового пространства, и перед удалением из второго кадра изображений всех динамических объектов создают общую маску динамических объектов второго кадра путем выявления всех совпадающих пикселей цветовых компонент. На фиг. 1 представлена схема построения опорного кадра, на фиг. 2, 3 представлены иллюстрации конкретных примеров построения опорных кадров для двух видеопоследовательностей, полученных со стационарно установленной камеры видеонаблюдения видеопоследовательность- изображение участка дороги в лесном массиве, видеопоследовательность- изображение аквариума с искусственным освещением, на фиг. 4, 5 представлены иллюстрации обоснования выбора интервала между анализируемыми кадрами. Построение опорного кадра, согласно фиг. 1, осуществляют следующим образом выбирают три анализируемых кадра (1, 2, 3) с видеопоследовательности, полученной со стационарно установленной камеры видеонаблюдения, с выбранным интервалом между анализируемыми кадрами. Зеленый цвет на кадрах 1, 2 и 3 отображает статические объекты, красный цвет отображает динамический объект. Сравнивают яркость пикселей с одинаковыми координатами попарно в первом-втором (1-2) и втором-третьем (2-3) кадрах с использованием минимаксной функции схожести. С учетом порога схожести выявляют совпавшие пиксели, относящиеся к статическим объектам, и не совпавшие пиксели - относящиеся к динамическим объектам. Формируют два вспомогательных двухцветных кадра 4 и 5, где совпавшим пикселям присваивают черный цвет, не совпавшим пикселям белый цвет. Затем формируют еще один вспомогательный кадр 6, где отображены динамические объекты второго анализируемого кадра, путем выявления совпавпшх цветов пикселей кадров 4 и 5. Из второго анализируемого кадра 2 удаляют все пиксели с координатами, соответствующими динамическим объектам кадра 6, и на это место помещают пиксели с кадра 1 или 3 с теми же координатами. На полученном в результате кадре 7 отсутствует динамический объект (красный цвет), этот кадр принимают как опорный. 3 11702 1 2009.04.30 Пример 1. Выбрали три анализируемых кадра ( 1, 51 и 101) с видеопоследовательности . На фиг. 2 это кадры 11, 21 31. Значение интервала между кадрами можно определить из следующих соображений. Для эффективного выявления динамических объектов на анализируемых кадрах необходимо выбрать такие кадры, где объекты совершили бы перемещение в пространстве больше длины своего корпуса. Пусть длина корпуса машины около 3 метров. Для видеопоследовательностисредняя скорость движения машин на изображенном участке дороги в соответствии с правилами дорожного движения принята 70 км/час, т.е. около 1,94 м/с. Таким образом, объекту требуется около 1,54 секунды для преодоления 3 метров. При скорости видеозахвата камеры 30 кадров/сек это 46 кадров. Для более уверенного определения можно взять интервал 50 кадров. Порог схожести(процент сходных по яркости пикселей с одинаковыми координатами в анализируемых кадрах) принят 90 . Цветовое пространство для передачи изображений . Главная динамическая составляющая на всех трех анализируемых кадрах - грузовая машина, передвигающаяся по дороге с переднего плана вдаль. Кроме того, в кадрах присутствует автомобиль синего цвета, движущийся издалека к переднему плану. Имеется также несколько мелких динамических объектов, которыми в примере можно пренебречь(человек с коляской вдали слева и колыхание деревьев). Для каждой цветовой составляющей сравнивали яркость пикселей с одинаковыми координатами попарно в первом - втором (1-21) и втором-третьем (21-31) кадрах с использованием минимаксной функции схожести. С учетом принятого порога схожести выявляли совпавшие пиксели, относящиеся к статическим объектам, и не совпавшие пиксели, относящиеся к динамическим объектам. Формировали два вспомогательных двухцветных кадра 41 и 51, где совпавшим пикселям присваивали черный цвет, не совпавшим пикселям белый цвет. Затем формировали еще один вспомогательный кадр 61, где отображены динамические объекты второго анализируемого кадра, путем выявления совпавших цветов пикселей кадров 41 и 51. Из второго анализируемого кадра 21 удалили все пиксели с координатами, соответствующими динамическим объектам кадра 61 и на это место поместили пиксели с кадра 31 с теми же координатами. На полученном в результате кадре 71 отсутствуют изображения грузовика и автомобиля, этот кадр принимаем как опорный. Аналогично осуществляли построение опорных кадров для видеопоследовательностипри интервале между анализируемыми кадрами в 20, 30 и 60 кадров. Результаты представлены на фиг. 4. Как видно из представленных иллюстраций, при значении интервала в 20 и 60 кадров в опорном кадре возникают ложные объекты, которые обведены в красные квадраты. При значении интервала в 30 кадров формируется опорный кадр требуемого качества. Пример 2. Выбрали три анализируемых кадра ( 1, 31 и 61) с видеопоследовательности . На фиг. 3 это кадры 12, 22, 32. Главная динамическая составляющая на этих кадрах - рыбы различных форм, передвигающиеся с различными скоростями. Имеется также несколько мелких динамических объектов, которыми в примере можно пренебречь (например, движение водорослей в аквариуме). Условия и порядок построения опорного кадра как в примере 1. На полученном в результате кадре 72 отсутствуют изображения различных рыб, этот кадр принимаем как опорный. Аналогично осуществляли построение опорных кадров для видеопоследовательностипри интервале между анализируемыми кадрами в 20, 50 и 60 кадров. Результаты представлены на фиг. 5. Как видно из представленных иллюстраций при значении интервала в 20 и 60 кадров в опорном кадре возникают ложные объекты, которые обведены в красные квадраты. При значении интервала в 50 кадров формируется опорный кадр требуемого качества. 4 11702 1 2009.04.30 Уменьшение временных затрат на создание опорного кадра достигается вследствие того, что выбираются всего лишь три кадра видеопоследовательности, затем попарно сравниваются первый-второй и второй-третий анализируемые кадры и на основе этого формируются два вспомогательных кадра, которые также сравниваются для удаления изображений динамических объектов из второго кадра, затем на освобожденные участки помещают элементы из первого или третьего анализируемых кадров. Улучшение качественных характеристик опорного кадра достигается за счет использования минимаксной функции схожести, которая характеризуется высокой контрастностью и позволяет эффективно установить уровень порога схожести пикселей анализируемых кадров. Источники информации 1. - , -. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 8
МПК / Метки
МПК: G06F 7/00
Метки: опорного, динамических, кадра, видеонаблюдения, детектирования, системе, способ, объектов, построения
Код ссылки
<a href="https://by.patents.su/8-11702-sposob-postroeniya-opornogo-kadra-dlya-detektirovaniya-dinamicheskih-obektov-v-sisteme-videonablyudeniya.html" rel="bookmark" title="База патентов Беларуси">Способ построения опорного кадра для детектирования динамических объектов в системе видеонаблюдения</a>
Система автоматизированного видеонаблюдения
Номер патента: U 2346
Опубликовано: 30.12.2005
Автор: Климчинский Игорь Леонидович
МПК: G08B 13/196
Метки: система, автоматизированного, видеонаблюдения
Текст:
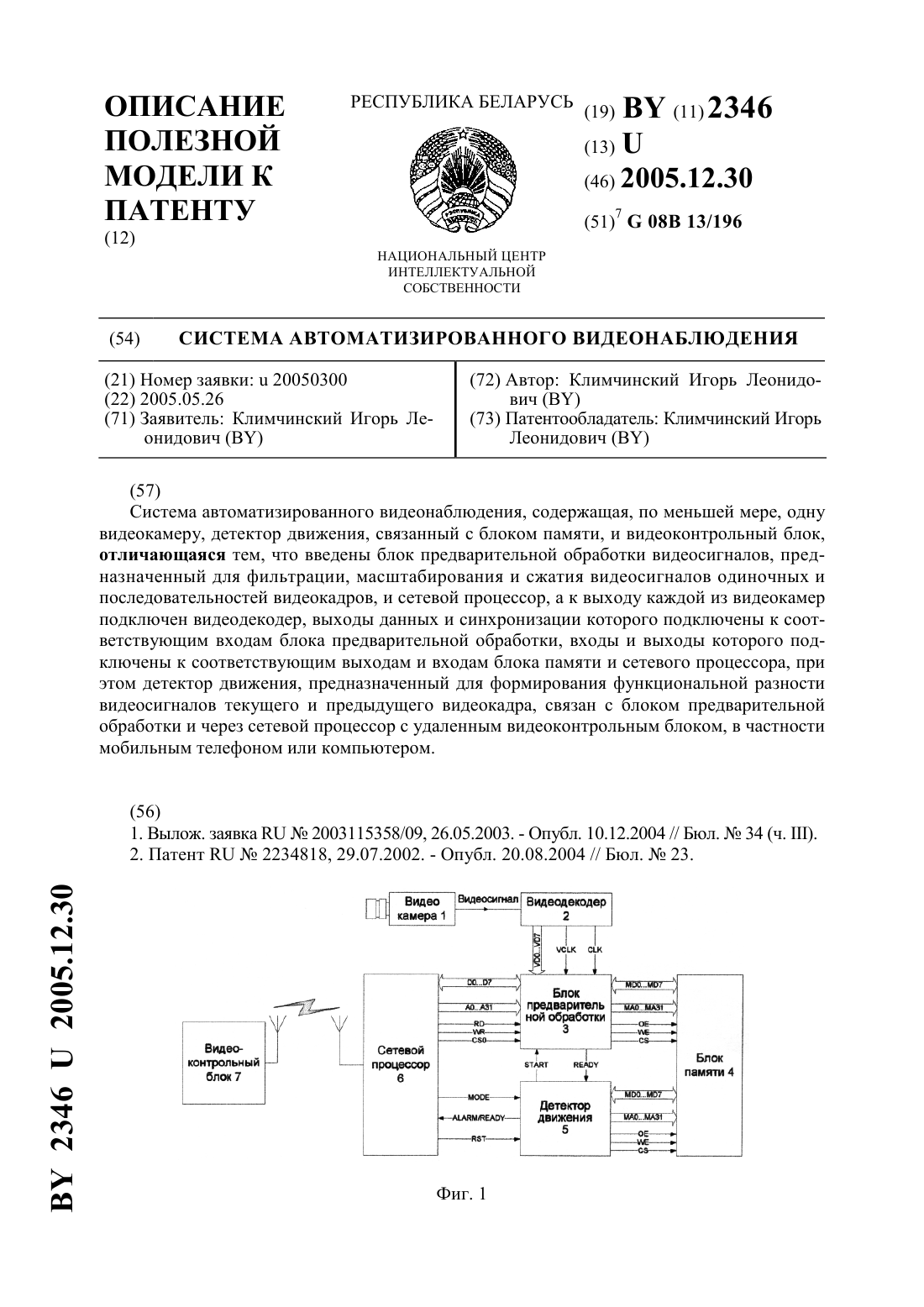
...чтениеми управления записьюблока 3 подключены к соответствующим выходам/входам сетевого процессора 6. Выходы сигнала режимаи сигнала сброса , а также вход сигнала тревоги/готовности / сетевого процессора 6 подключены к соответствующим входам и выходу детектора 5 движения. Антенный вход/выход сетевого процессора 6 по беспроводной телефонной сетисвязан с удаленным видеоконтрольным блоком 7. Система работает в двух режимах. В автоматическом...
Способ построения петли магнитного гистерезиса ферромагнитного образца для определения его магнитных характеристик
Номер патента: 9298
Опубликовано: 30.06.2007
Авторы: Осипов Александр Александрович, Матюк Владимир Федорович
МПК: G01R 33/14, G01R 33/16
Метки: гистерезиса, способ, образца, магнитных, определения, магнитного, характеристик, построения, ферромагнитного, петли
Текст:
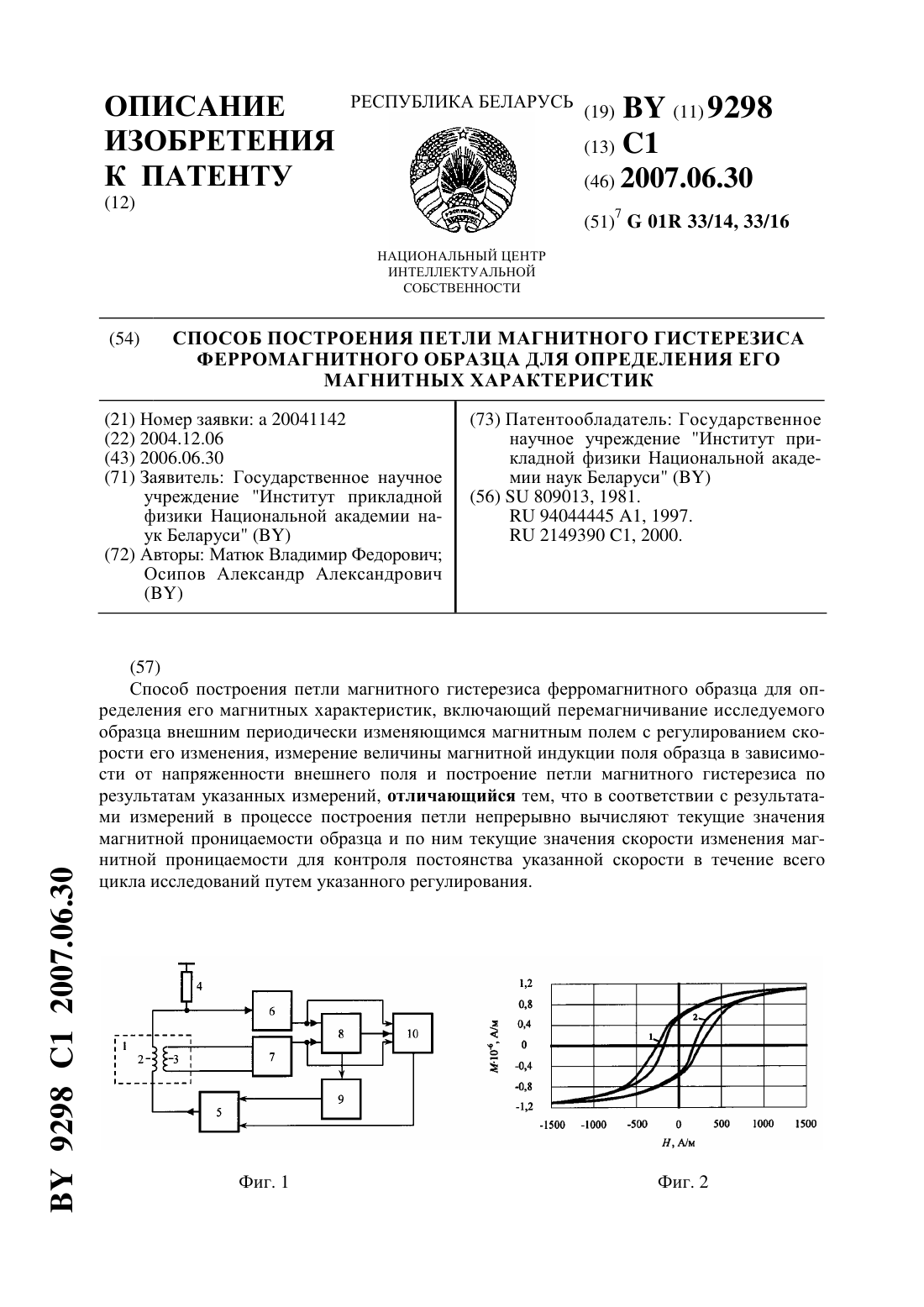
...образец перемагничивают внешним периодически изменяющимся магнитным полем с регулированием скорости его изменения, измеряют величины магнитной индукции образца в зависимости от напряженности внешнего поля и по результатам указанных измерений строят петлю магнитного гистерезиса, в соответствии с результатами измерений в процессе построения петли непрерывно вычисляют текущие значения магнитной проницаемости образца и по ним 2 9298 1 2007.06.30...
Способ построения радиоголографической антенны и плоская радиоголографическая антенна, полученная указанным способом

Номер патента: 6748
Опубликовано: 30.12.2004
Автор: Мизгайлов Владимир Николаевич
МПК: H01Q 19/06, H01Q 3/00
Метки: плоская, антенна, указанным, радиоголографическая, радиоголографической, способ, способом, антенны, построения, полученная
Текст:
...максимумов электрических составляющих поля, зарегистрированного на фигуре 3, в зависимости от угловой координаты , соответствующих радиусам с 13,14(фиг. 4), 26,91 (фиг. 5), 38,16 (фиг. 6), 411 (фиг. 7), соответственно, а также принцип выбора угловой ширины металлических пластин, соответственно, 1, 2, 3,4, используемых для изготовления бинарной радиоголограммы. На фигуре 8 изображен макет радиоголографической антенны типа...
Способ контроля местонахождения подвижных объектов
Номер патента: 7253
Опубликовано: 30.09.2005
Авторы: Демьяненко Анатолий Валентинович, Боглов Олег Михайлович, Чалый Александр Андреевич
МПК: G01S 5/02, H04B 7/185
Метки: контроля, объектов, подвижных, способ, местонахождения
Текст:
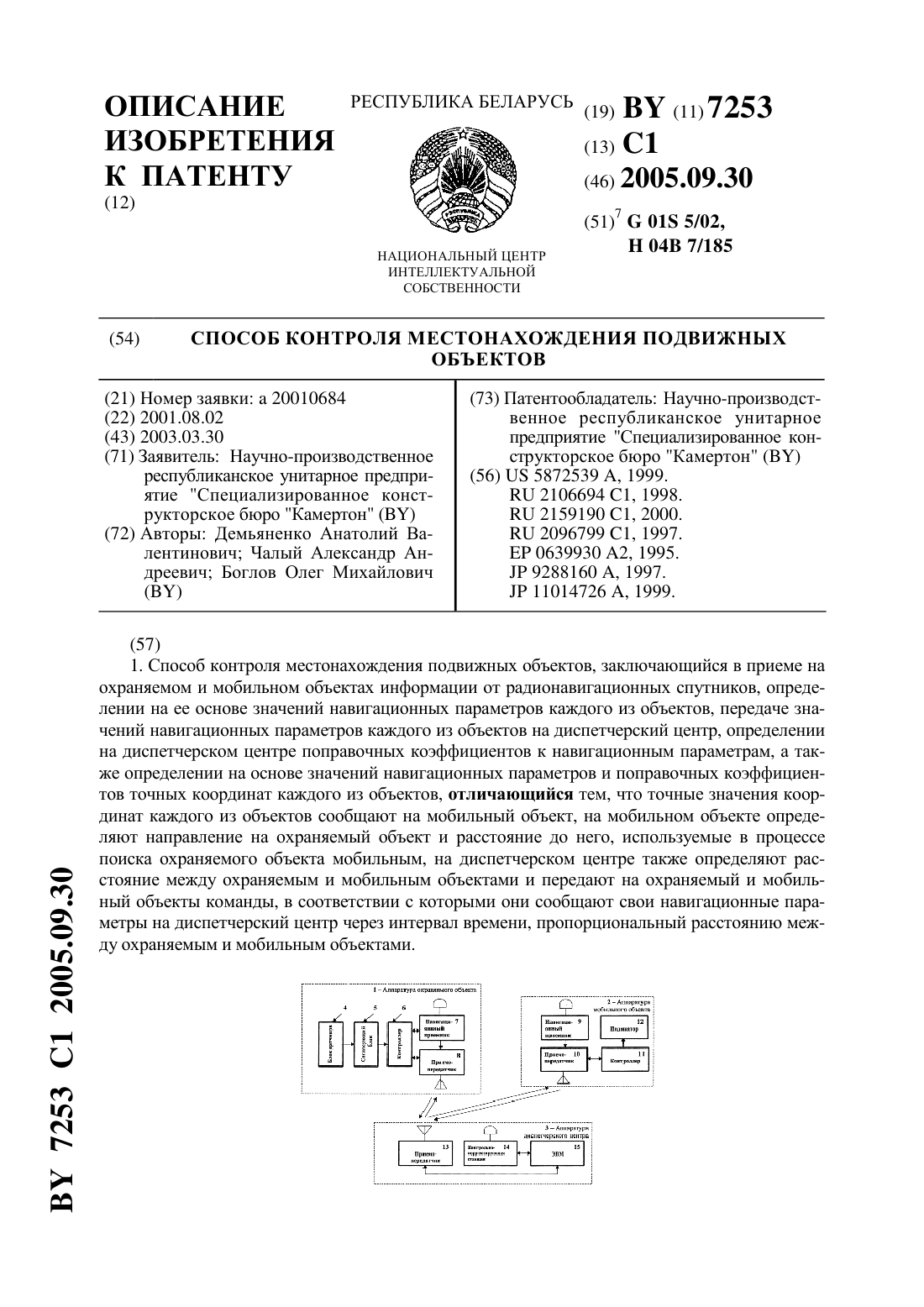
...фирмы 14 - контрольно-корректирующая станция, например, Репер-01 разработки НПО космического приборостроения 15 - персональная ЭВМ. Сущность изобретения состоит в следующем. Мобильный объект (или объекты), находящийся, например, в состоянии патрулирования, постоянно сообщает свои координаты на диспетчерский центр. В случае возникновения угрозы для охраняемого объекта он также сообщает свои навигационные параметры и причину вызова на...
Способ определения местоположения объектов
Номер патента: 6062
Опубликовано: 30.03.2004
Авторы: Макаров Александр Иванович, Демьяненко Анатолий Валентинович, Чалый Александр Андреевич
МПК: G01S 5/02
Метки: местоположения, способ, объектов, определения
Текст:
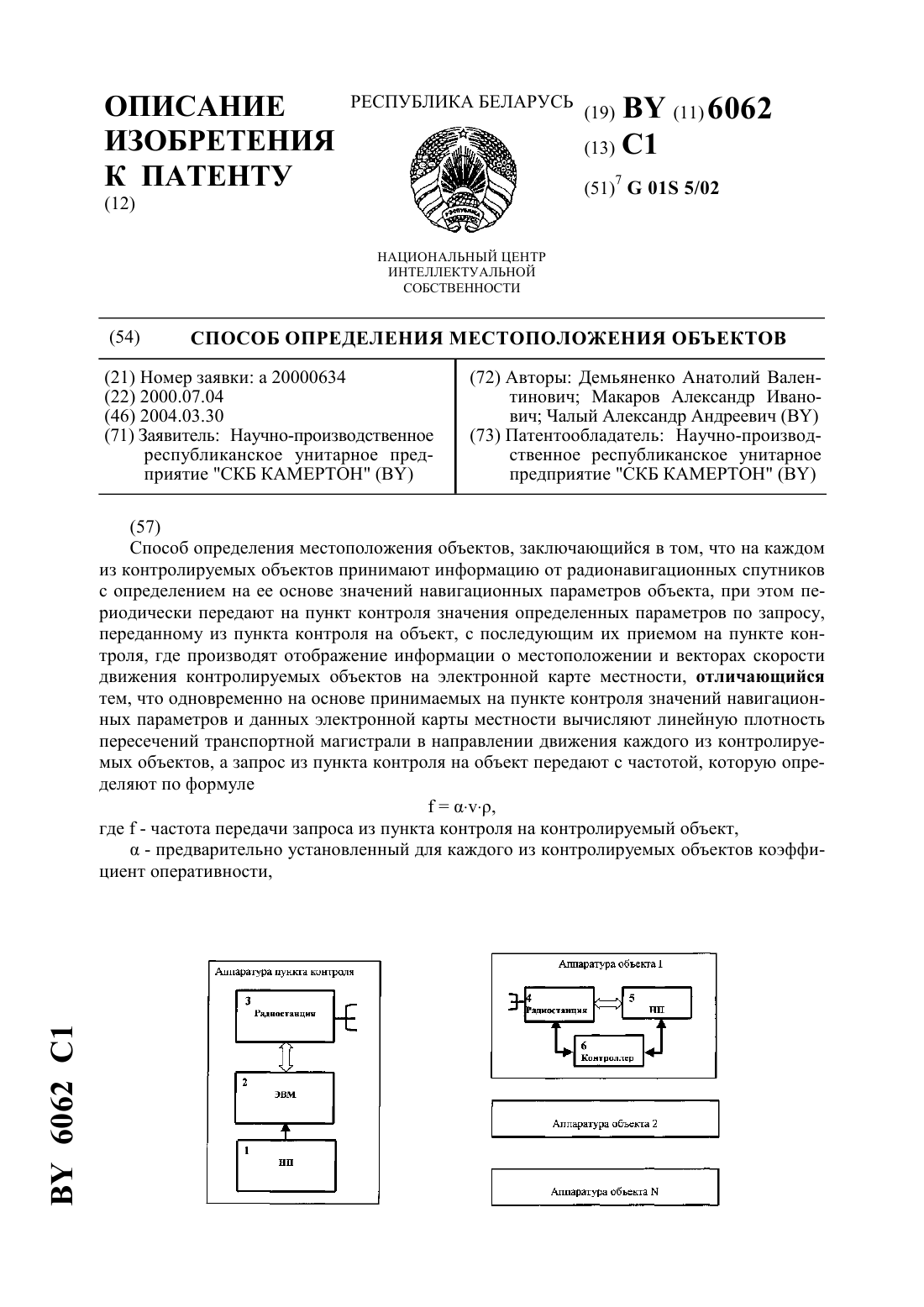
...каждого из объектов, характеризуемой коэффициентом оперативности. Это означает, что не каждый из контролируемых объектов следует опрашивать одинаково часто. Если местоположение некоторых объектов необходимо знать менее точно по сравнению с каким-то более важным объектом, то их и следует реже опрашивать. Следующим шагом является учет возможной смены маршрута, характеризуемый линейной плотностью перекрестков по направлению движения...
Предыдущий патент: Способ определения квантовой эффективности фотоприемника
Следующий патент: Объектив
Случайный патент: Способ подготовки коров-доноров с гипофункцией яичников к эмбриотрансплантации