Способ микрошагового управления шаговым двигателем и устройство для его осуществления
Номер патента: 7005
Опубликовано: 30.06.2005
Авторы: Дайняк Игорь Викторович, Межинский Юрий Сергеевич, Ковалев Сергей Владимирович, Павлюковский Игорь Анатольевич, Карпович Святослав Евгеньевич
Текст
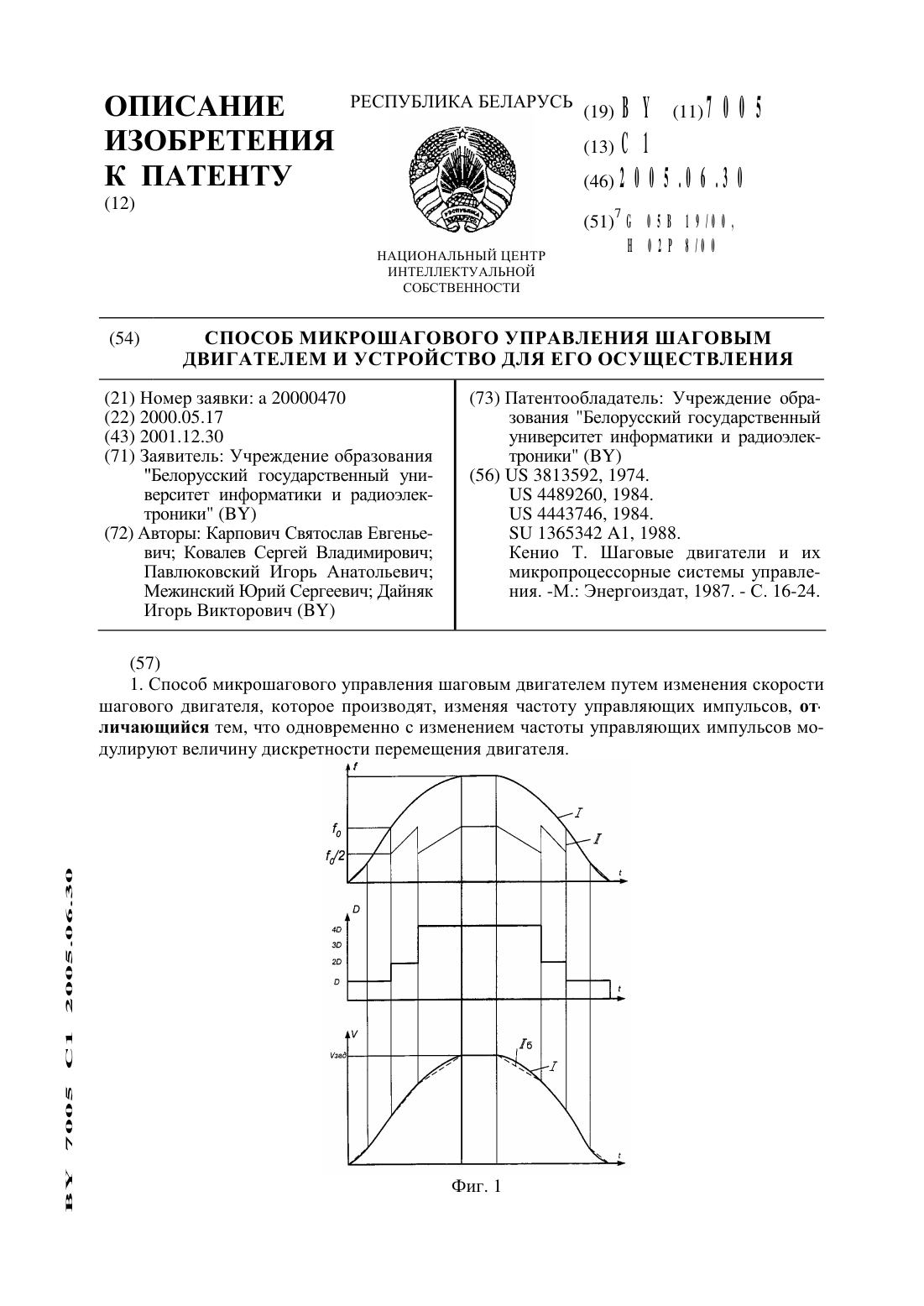
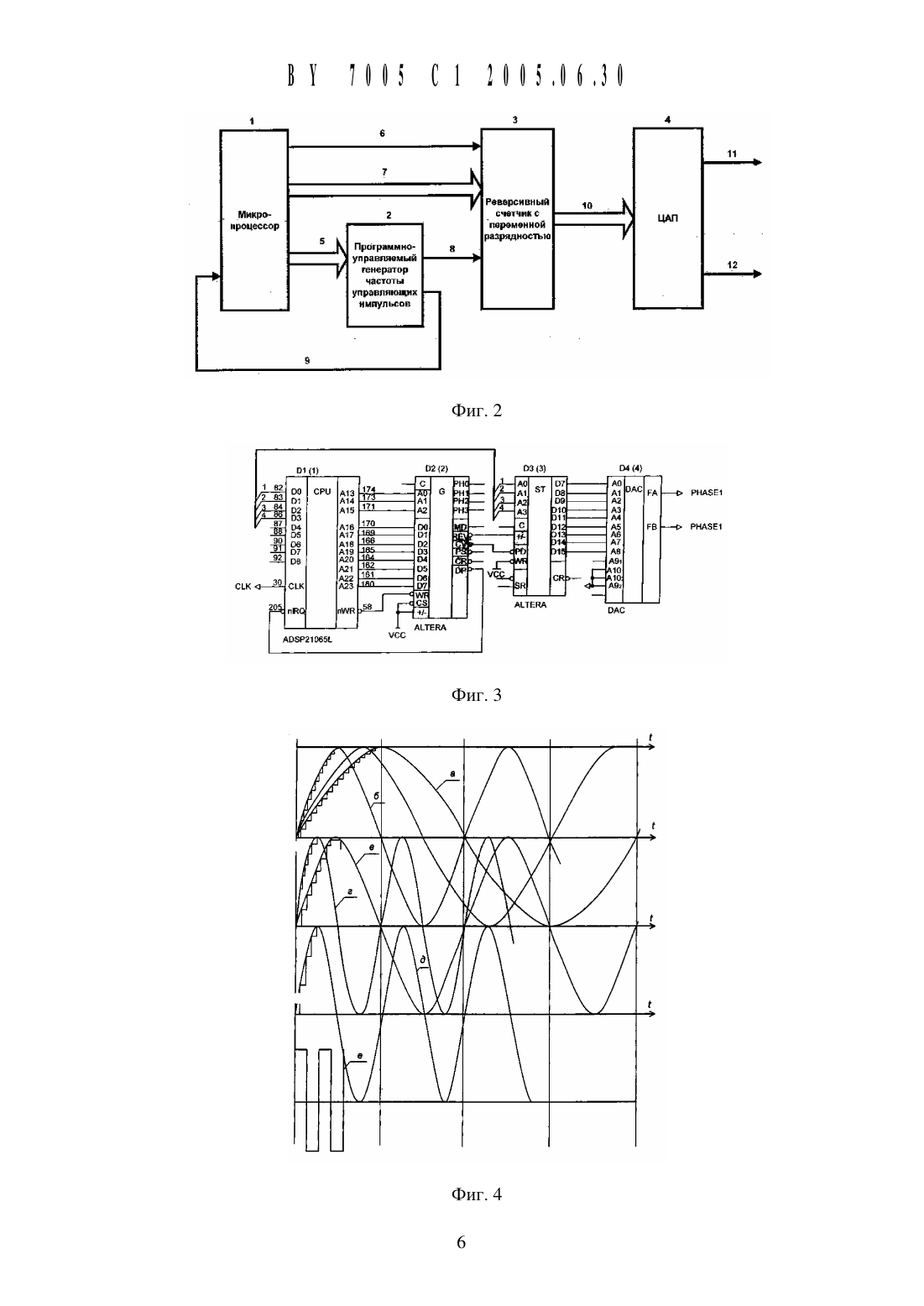
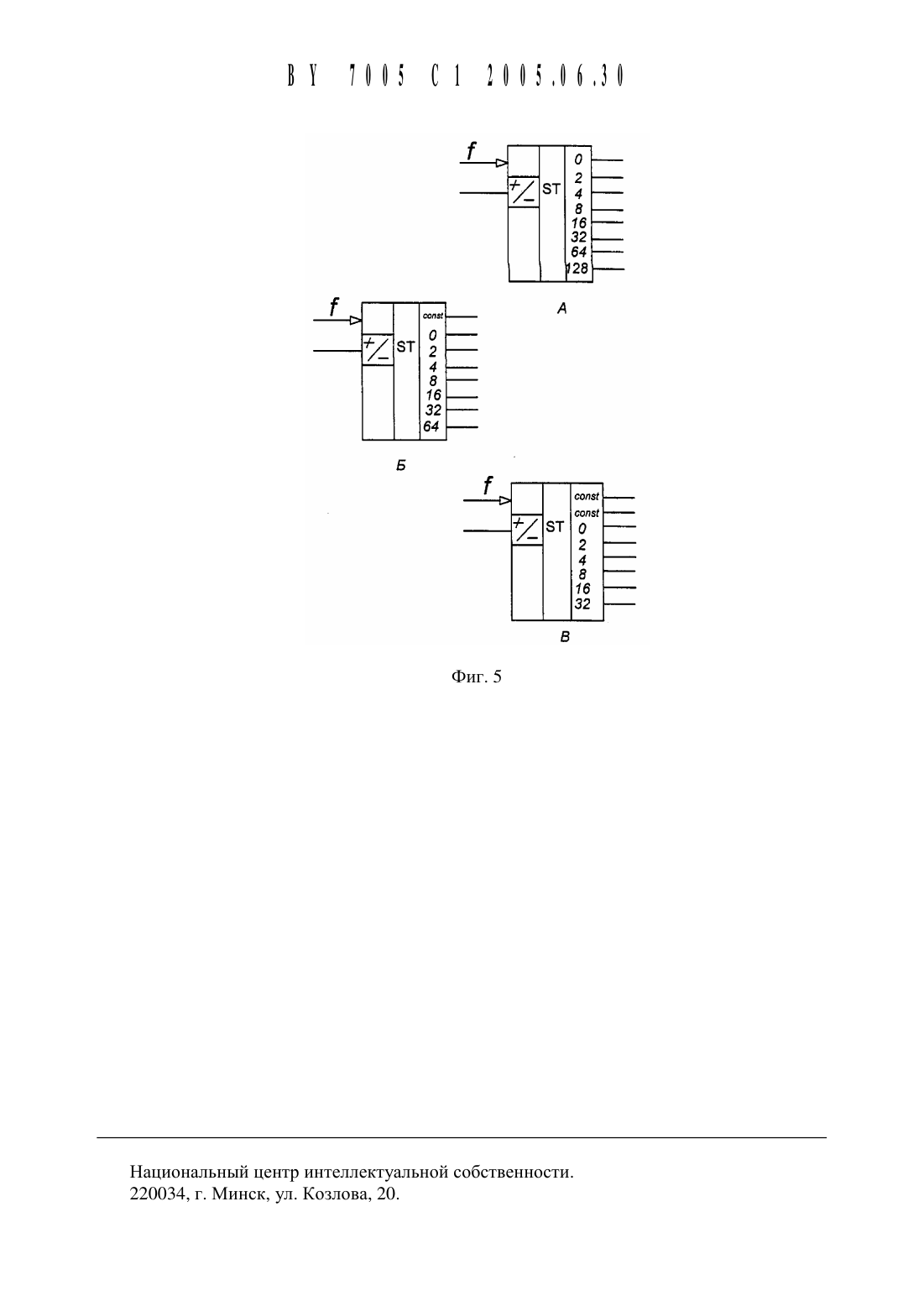
2. Устройство микрошагового управления шаговым двигателем, содержащее микропроцессор И цифро-аналоговый преобразователь, отличающийся тем, ЧТО содержит реверсивный счетчик с переменной разрядностью и программно-управляемь 1 й генератор Частоты входной последовательности управляющих импульсов, информационные входы которых подключены К соответствующим выходам микропроцессора, при этом выход реверсивного счетчика с переменной разрядностью подключен ко входу цифро-аналогового преобразователя, а его счетный вход к первому выходу программного управляемого генератора частоты входной последовательности управляющих импульсов, второй выход которого соединен со входом микропроцессора.Изобретение относится к автоматизированному электроприводу и может быть использовано для управления шаговыми электродвигателями в приборостроении.Известен способ управления шаговыми двигателями, который реализуется посредством подачи на входы коммутатора, переключающего обмотки электродвигателя, двух последовательностей импульсных команд 1.Скорость двигателя при этом определяется разностью частот импульсных команд.Устройство для осуществления этого способа содержит коммутатор, распределитель импульсов и делитель мощности 2.Недостатком этих технических решений является узкий динамический диапазон работы двигателя, обусловлено это сложностью расчета и формирования заданной траектории движения, т.к. она находится в интегральной зависимости от разности входных частот.Известен способ управления шаговым двигателем, по которому скорость движения изменяют пропорционально частоте входной последовательности управляющих импульсов 3. Для формирования требуемой траектории движения шагового двигателя со скоростью, превышающей скорость приемистости, используют участки равноускоренного и равнозамедленного движения.Устройство управления, реализующее данный способ, содержит микропроцессорное устройство, реверсивный счетчик и драйвер шагового двигателя 4.Недостатком этих технических решений является то, что при малой величине дискретности перемещения для достижения высокой скорости требуемая частота входной последовательности управляющих импульсов принимает значения, при которых микропроцессорное устройство, выполненное на современной элементарной базе, не обеспечивает требуемого быстродействия, необходимого для решения задачи формирования заданной траектории движения. Это объясняется тем, что интервал времени, между соседними импульсами входной последовательности, рассчитывается микропроцессором на каждом шаге шагового двигателя и, при сложной форме траектории, это требует значительного машинного времени. Так, при требуемой точности позиционирования В 1 мкм и скорости движения У 1 м/сек расчетная частота импульсов управления равнаВремени в 1 мкс микропроцессору может оказаться недостаточно для расчета траектории движения, включающей участки разгона и торможения. Следовательно, при данном способе управления максимальная скорость при заданной дискретности перемещения или минимальная величина дискретности при заданной скорости ограничены.Ограничения становятся еще более жесткими в том случае, когда за время расчета интервала между импульсами управления необходимо отрабатывать информацию с датчиков ускорения, концевых и всевозможных технологических датчиков.Наиболее близким по технической сущности и достигаемому результату является способ микрошагового управления шаговым двигателем, при котором изменение скорости перемещения осуществляют в функциональной зависимости от числа управляющих импульсов 5.Устройство управления, реализующее данный способ, содержит микропроцессорное устройство И цифро-аналоговый преобразователь для щагового двигателя 5.Недостатком этих технических решений является узкий динамический диапазон двигателя при малой величине дискретности перемещения. Обусловлено это тем, ЧТО для систем управления, реализующих щирокий диапазон перемещений, скоростей и ускорений,т.е. имеющих щирокий динамический диапазон по всем параметрам траектории движения, требуется значительный объем постоянной мащинной памяти, что приводит к значительному увеличению стоимости и сложности устройства. К недостаткам этих технических рещений относится также то, что на проведение анализа количества управляющих импульсов, расчета интервалов между соседними управляющими импульсами, а также выборки табличных значений требуется значительное количество мащинных команд и при высокой скорости движения щагового двигателя современные микропроцессорные устройства могут не обеспечивать требуемого быстродействия работы.Задачей изобретения является расщирения динамического диапазона работы двигателя при малой величине дискретности перемещения.Поставленная задача достигается тем, что в известном способе микрощагового управления щаговым двигателем, при котором изменение скорости щагового двигателя осуществляют в зависимости от частоты управляющих импульсов, одновременно изменяют скорость щагового двигателя, модулируя величину дискретности перемещения.Поставленная задача достигается также тем, что в устройство микрощагового управления щаговым двигателем, содержащее микропроцессор и цифро-аналоговый преобразователь, введены реверсивный счетчик с переменной разрядностью и программноуправляемый генератор частоты входной последовательности управляющих импульсов,информационные входы которых подключены к соответствующим выходам микропроцессора, при этом выход реверсивного счетчика с переменной разрядностью подключен ко входу цифро-аналогового преобразователя, а его счетный вход - к первому выходу программно-управляемого генератора частоты входной последовательности управляющих импульсов, второй выход которого соединен со входом микропроцессора.Предлагаемый способ отличается от известного способа микрощагового управления щаговым двигателем тем, что для управления скоростью двигателя используют как число управляющих импульсов, так и величину дискретности перемещения.Отличие заявляемого устройства заключается в том, что в него дополнительно введены программно-управляемый генератор частоты управляющих импульсов и реверсивный счетчик с переменной разрядностью, посредством которых возможно управление частотой входной последовательности импульсов и величиной дискретности перемещения в процессе движения щагового двигателя по командам с микропроцессора.Сущность предложенного изобретения раскрывается посредством фигур, на которых представленона фиг. 1 - графическая интерпретация предложенного способа управления посредством временных зависимостей Кг), 130), /(г) (кривая 1 - прототип, кривая П - заявляемый способ), где Г - частота управляющих импульсов, В - дискретность перемещения двигателяна фиг. 2 - функциональная схема устройства, реализующего предложенный способ микрощагового управленияна фиг. 3 - принципиальная схема устройства, реализующего предложенный способ микрощагового управленияна фиг. 4 - форма выходного напряжения цифро-аналогового преобразователя щагового двигателя при различной дискретности перемещения.Как известно точность позиционирования определяется величиной дискретности перемещения в квазистатическом режиме. В динамике в разомкнутой системе управлениядопустимая ошибка рассогласования электрического и механического векторов положения якоря шагового двигателя может находиться в пределах Ы/4, где т - период нарезки индуктора или механический шаг двигателя. При этом максимальное значение динамической ошибки не зависит от величины дискретности перемещения 6. Исходя из этого, во время движения якоря шагового двигателя, допустимо изменение дискретности перемещения, что приводит к соответствующему изменению скорости движения.Способ реализован следующим образом (фиг. 1).При разгоне двигателя увеличивают частоту управляющих импульсов до значения го. Причем Го выбирают с учетом быстродействия микропроцессора, исходя из величины максимальной скорости двигателя Утдх, глубины модуляции величины дискретности пе ремещения Ы и величины механического шага двигателя т по формуле Го 1 Т/Х/т.При достижении значения Го частоты управляющих импульсов увеличивают дискретность перемещения в два раза с соответствующим уменьшением управляющей частоты до значения 10/2 (кривой 11 на фиг. 1). При этом зависимость / не изменяется, так какДанный процесс увеличения дискретности и периодического линейного увеличения частоты управления от 10/2 до Го с последующим уменьшением до Го/2 продолжают до достижения скорости Узад, заданной при разгоне двигателя.При торможении осуществляют уменьшение дискретности перемещения с периодическим уменьшением частоты управляющих импульсов от Го до 10/2.При переключении величины дискретности перемещения выдают информацию о требуемой величине ускорения с микропроцессора на программно-управляемый генератор частоты управляющих импульсов, что позволяет проводить кусочно-линейную аппроксимацию заданной функции скорости от числа управляющих импульсов (кривая 11 б на фиг. 1). Количество участков аппроксимации выбирают таким, чтобы ошибка была минимальной.Предложенный способ допускает, при достижении величины скорости определенного значения (го), дальнейшее изменение скорости производить путем изменения величины дискретности перемещения. При этом частота управляющих импульсов постоянна. Устройство, реализующее предложенный способ микрошагового управления (фиг. 2), состоит из микропроцессора (1), программно-управляемого генератора частоты управляющих импульсов (2), реверсивного счетчика (3) с переменной разрядностью и цифро-аналогового преобразователя (4).Устройство работает следующим образом с микропроцессора на информационный вход программно-управляемого генератора поступает информация о параметрах траектории по шине (5), а по шинам (6) и (7) подается соответственно направление перемещения и код разрядности для реверсивного счетчика с переменной разрядностью. Программноуправляемый генератор частоты управляющих импульсов на основании получаемой информации формирует унитарную последовательность импульсов, поступающую по шине(8) на счетный вход реверсивного счетчика и по шине (9) на вход микропроцессора.Реверсивный счетчик преобразует последовательный унитарный код в параллельный,причем вес входного импульса в выходном параллельном коде зависит от установленной разрядности счетчика, что определяет, в конечном счете, величину дискретности перемещения. Далее параллельный код с реверсивного счетчика поступает по шине (10) на вход цифро-аналогового преобразователя, где происходит преобразование кода в квантованные синусоидальные сигналы по количеству фаз применяемого шагового двигателя, а также осуществляется требуемый фазовый сдвиг между выходными сигналами по шинам (11),(12) и усиление сигналов по мощности.После того, как микропроцессором определяется начальная скорость, ускорение И дискретность перемещения, на выходе программно-управляемого генератора (шина 8) начинают вырабатываться импульсы с возрастающей по линейному закону частотой.Интервалы времени, необходимые для увеличения частоты импульсов от Г начальное до Го и от Го/2 до Го рассчитывается микропроцессором перед началом движения, на основании известного ускорения и ожидаемой величины приращения скорости.По истечении каждого интервала времени микропроцессор перезагружает программно-управляемый генератор и реверсивный счетчик соответственно увеличивая (уменьшая) частоту и уменьшая (увеличивая) дискретность перемещения.Принципиальная схема устройства (фиг. 3), разработанная по выше приведенной функциональной схеме, включает микропроцессор А 135 Р-21 О 65 Ь (131), программно-управляемый генератор (132) частоты управляющих импульсов, реверсивный счетчик (133) с переменной разрядностью, реализованные на базе РЬВ фирмы А 1 гега, и функциональный цифроаналоговь 1 й преобразователь (134) для преобразования цифрового кода в аналоговый,управляющий перемещением шагового двигателя.На фиг. 4 приведена форма выходного сигнала с одного выхода функционального преобразователя (4). Синусоида (а) соответствует частоте управляющих импульсов Го/2, а синусоида (б) - частоте Го при дискретности 13. Далее происходит переключение дискретности на 213 и переход на синусоиду (в) с частотой управляющих импульсов Го/2.Аналогично осуществляются переходы к синусоидам (г) и (д). На последней временной зависимости (е) представлен случай вырожденного микрошагового управления в обычное управление с дискретностью перемещения, равной половине механического шага двигателя.На фиг. 5 схематично показан счетчик с переключающейся разрядностью. Положение разрядов верхнего счетчика (А) соответствует синусоиде (а), счетчика (Б) - синусоиде (в) и счетчика (В) - синусоиде (д).Использование предложенных способов и устройства микрошагового управления расширяет динамический диапазон работы системы управления шаговым приводом, позволяя работать практически на любой требуемой скорости и ускорении, что повышает производительность оборудования, включающего шаговый привод.6. Кенио Т. Шаговые электродвигатели и их микропроцессорные системы управления.
МПК / Метки
МПК: G05B 19/00, H02P 8/00
Метки: микрошагового, осуществления, управления, двигателем, способ, устройство, шаговым
Код ссылки
<a href="https://by.patents.su/7-7005-sposob-mikroshagovogo-upravleniya-shagovym-dvigatelem-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" rel="bookmark" title="База патентов Беларуси">Способ микрошагового управления шаговым двигателем и устройство для его осуществления</a>
Устройство для управления асинхронным двигателем
Номер патента: 2805
Опубликовано: 30.06.1999
Авторы: Скарыно Борис Борисович, Коваль Александр Сергеевич
МПК: H02P 7/622, H02P 7/36
Метки: устройство, двигателем, асинхронным, управления
Текст:
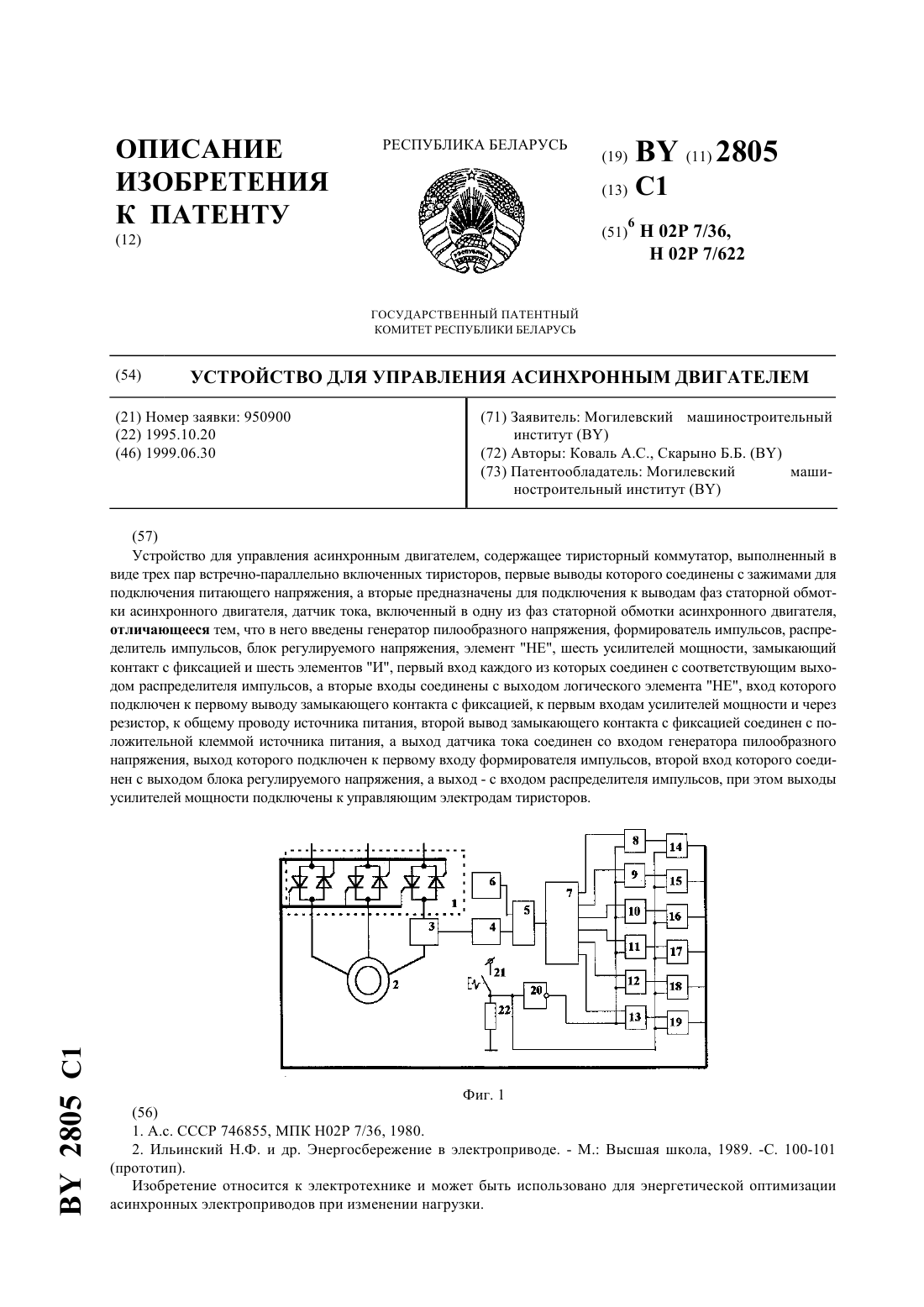
...статорной обмотки асинхронного двигателя 2 датчик тока 3, включенный в одну из фаз статорной обмотки асинхронного двигателя 2 генератор пилообразного напряжения 4, входом соединенный с выходом датчика тока 3, а выходом подключенный к одному входу формирователя импульсов 5, на другой вход которого подключен выход блока регулируемого напряжения 6 распределитель импульсов 7, входом соединенный с выходом формирователя импульсов 5, а...
Система автоматического управления двигателем
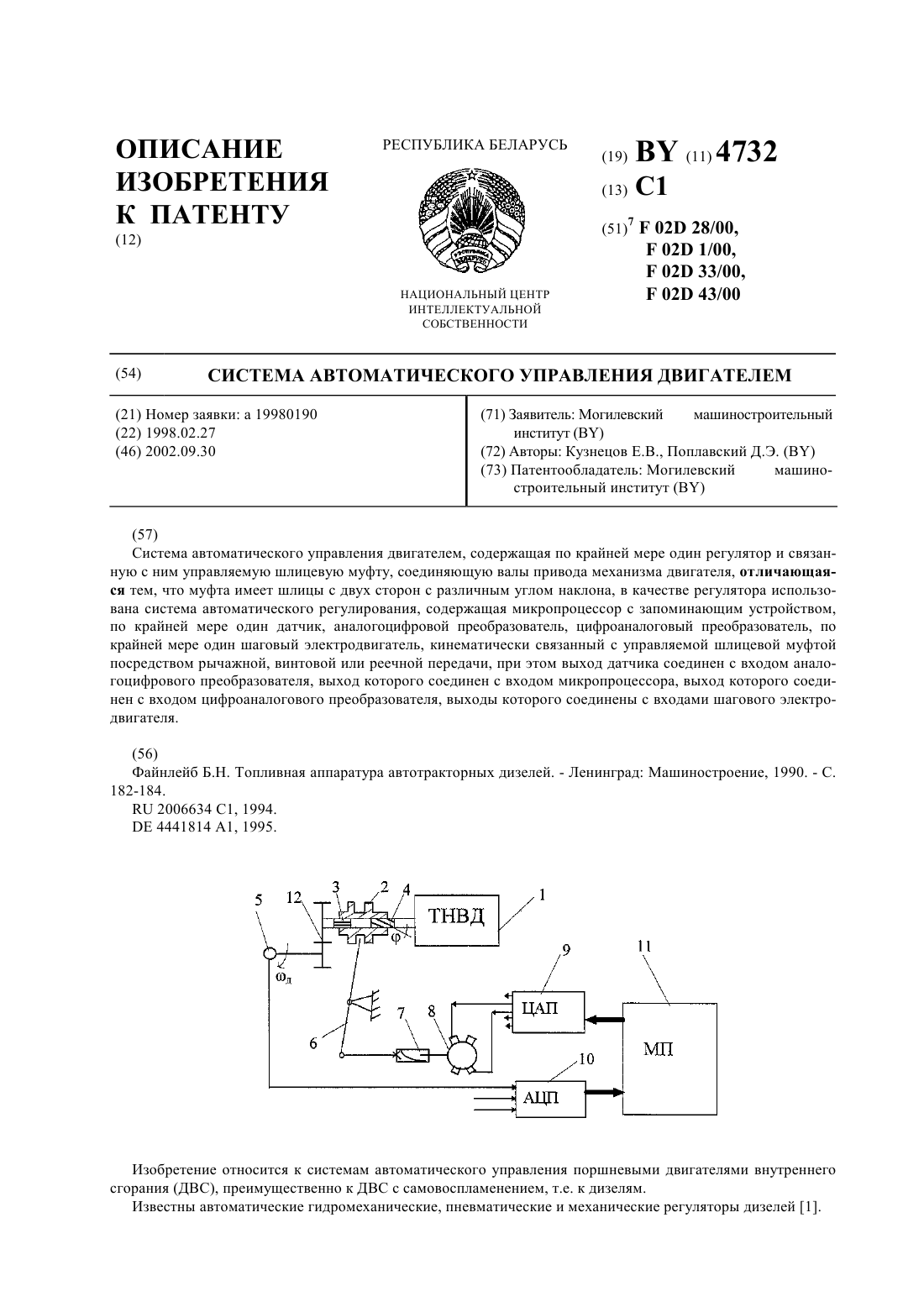
Номер патента: 4732
Опубликовано: 30.09.2002
Авторы: Кузнецов Евгений Владимирович, Поплавский Дмитрий Эдуардович
МПК: F02D 1/00, F02D 28/00, F02D 33/00...
Метки: автоматического, двигателем, система, управления
Текст:
...регулятора использована система автоматического регулирования, содержащая микропроцессор с запоминающим устройством, по крайней мере, один датчик, аналогоцифровой преобразователь,цифроаналоговый преобразователь, по крайней мере один шаговый электродвигатель, кинематически связанный с управляемой шлицевой муфтой посредством рычажной, винтовой или реечной передачей, при этом выход датчика соединен с входом аналогоцифрового преобразователя,...
Способ непрерывного определения степени насыщения горячих растворов сильвином для контроля и управления процессом горячего растворения неочищенной калийной соли и устройство для его осуществления
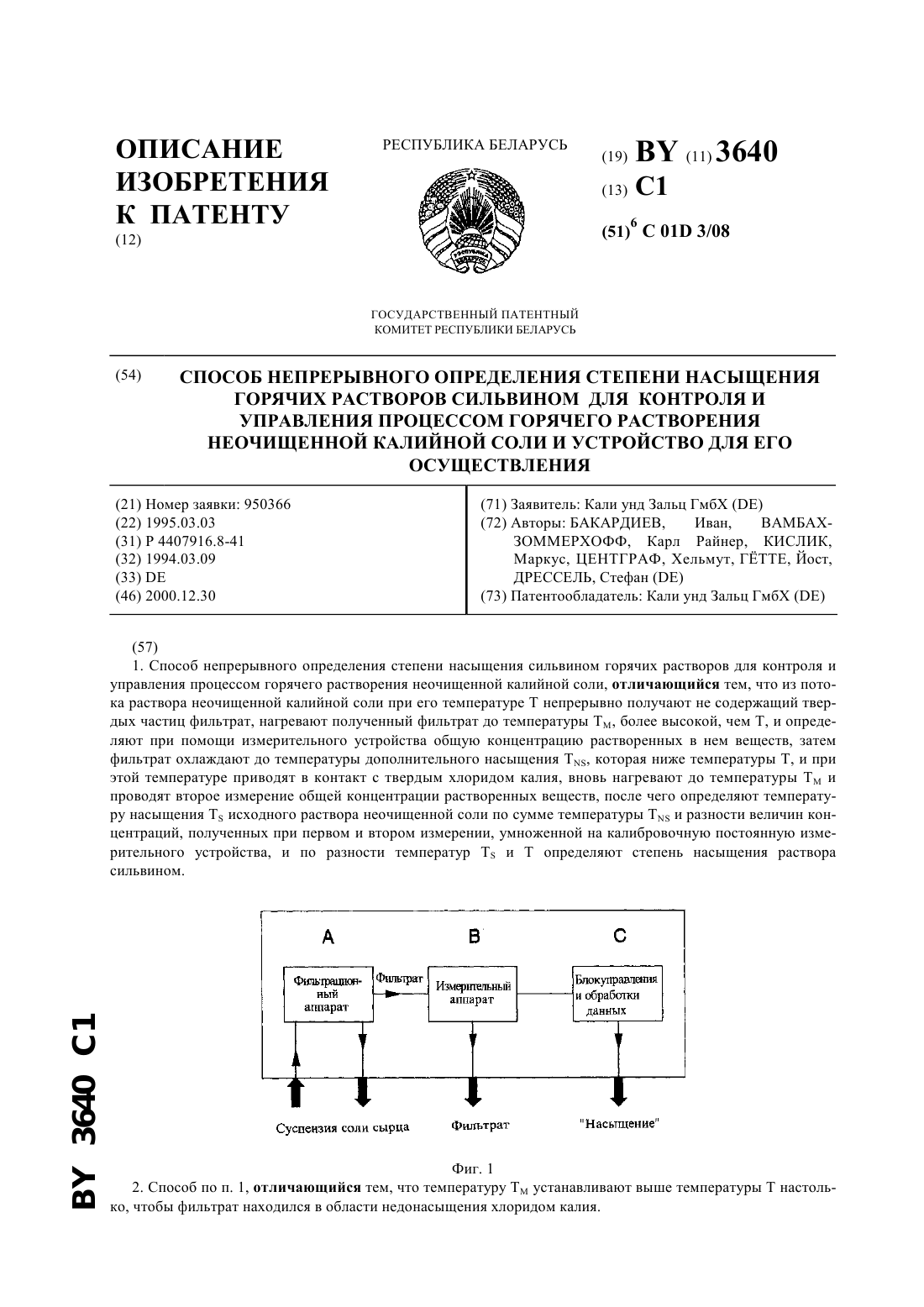
Номер патента: 3640
Опубликовано: 30.12.2000
Авторы: КИСЛИК, Маркус, ВАМБАХ-ЗОММЕРХОФФ, Карл Райнер, ГЁТТЕ, Йост, ДРЕССЕЛЬ, Стефан, ЦЕНТГРАФ, Хельмут, БАКАРДИЕВ, Иван
МПК: C01D 3/08
Метки: определения, соли, способ, горячего, неочищенной, осуществления, горячих, управления, непрерывного, калийной, процессом, растворения, сильвином, устройство, контроля, степени, растворов, насыщения
Текст:
...гибких вибродатчиков и датчиков скорости звука, а также дифференциальное измерение, поскольку определение насыщения, даже при очень высокой точности его определения, не дает ясной характеристики раствора соли-сырца (относительно степени его насыщения хлоридом калия), из-за того, что содержание в нем остальных компонентов также является переменным. Согласно изобретению, способ заключается в том, что из потока раствора неочищенной...
Устройство числового программного управления
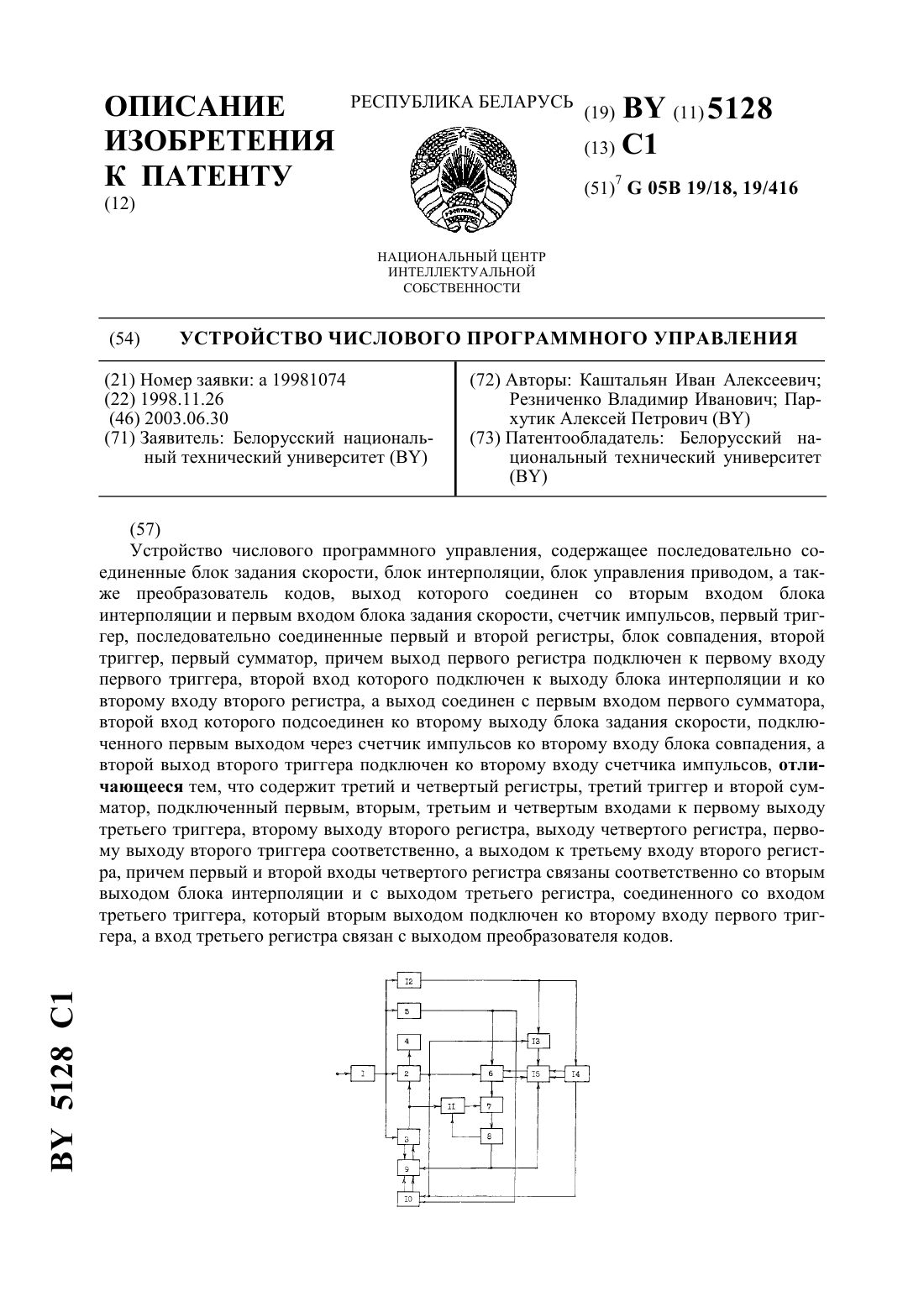
Номер патента: 5128
Опубликовано: 30.06.2003
Авторы: Каштальян Иван Алексеевич, Резниченко Владимир Иванович, Пархутик Алексей Петрович
МПК: G05B 19/416, G05B 19/18
Метки: программного, управления, устройство, числового
Текст:
...введены третий и четвертый регистры, третий триггер и второй сумматор, подключенный первым, вторым, третьим и четвертым входами к первому выходу третьего триггера, второму выходу второго регистра, выходу четвертого регистра,2 5128 1 первому выходу второго триггера соответственно, а выходом к третьему входу второго регистра, причем первый и второй входы четвертого регистра связаны соответственно со вторым выходом блока интерполяции и с...
Устройство числового программного управления
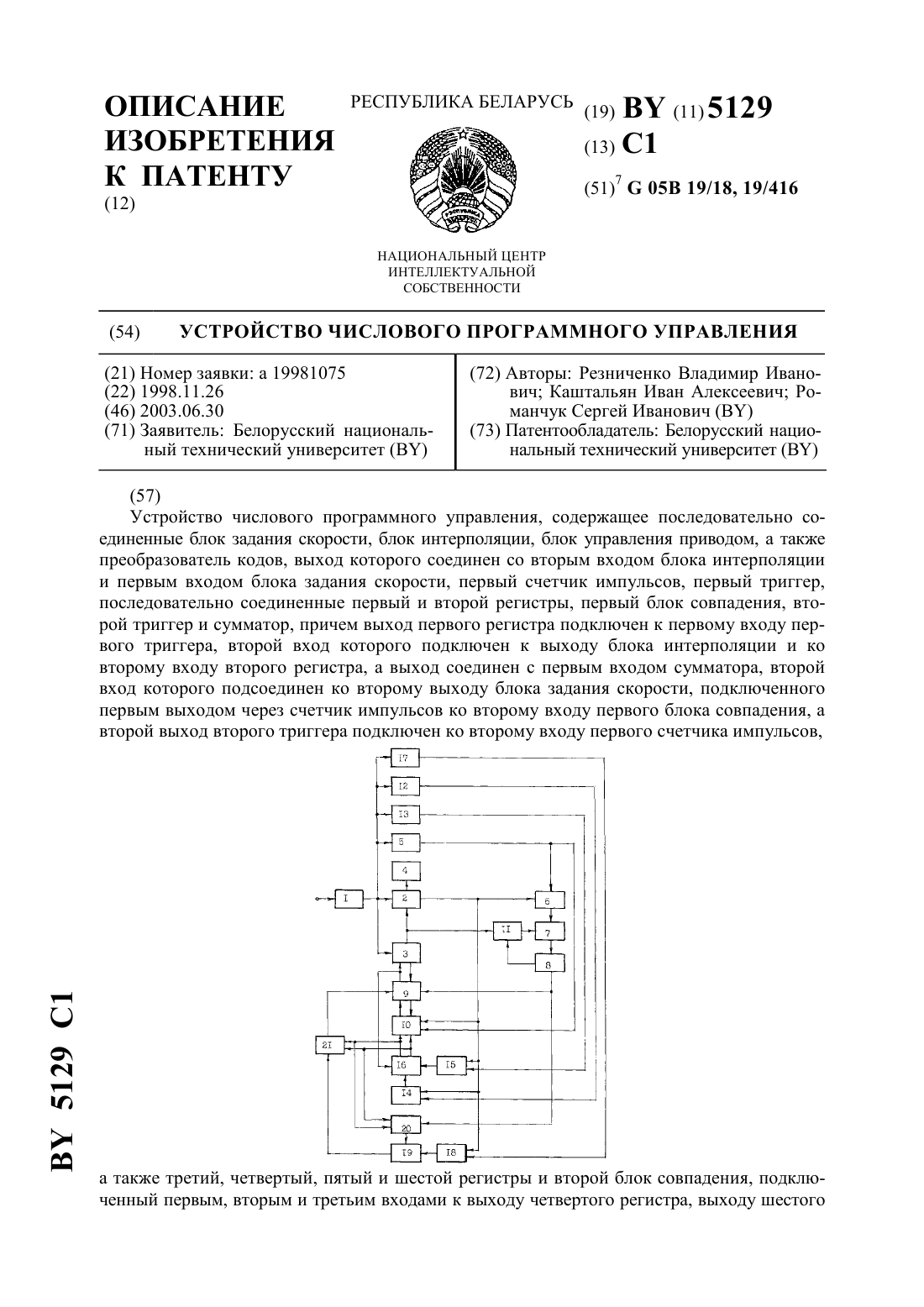
Номер патента: 5129
Опубликовано: 30.06.2003
Авторы: Романчук Сергей Иванович, Каштальян Иван Алексеевич, Резниченко Владимир Иванович
МПК: G05B 19/416, G05B 19/18
Метки: управления, устройство, программного, числового
Текст:
...совпадения соответственно, а также с первым и вторым входами второго счетчика, подключенного третьим входом к первому выходу второго триггера, а выход третьего триггера подключен к четвертому входу сумматора, причем первый вход восьмого регистра связан с выходом блока интерполяции, а второй вход с выходом седьмого регистра, соединенного входом с выходом преобразователя кодов. На чертеже представлена блок-схема устройства. Устройство...
Предыдущий патент: Композиция на основе полиолефина с повышенными прочностными свойствами
Следующий патент: Линия нанесения защитных покрытий
Случайный патент: Машина для резки ковра кровли