Электромеханический микродатчик силы
Номер патента: 5534
Опубликовано: 30.09.2003
Авторы: Ефремов Георгий Игнатьевич, Мухуров Николай Иванович
Текст
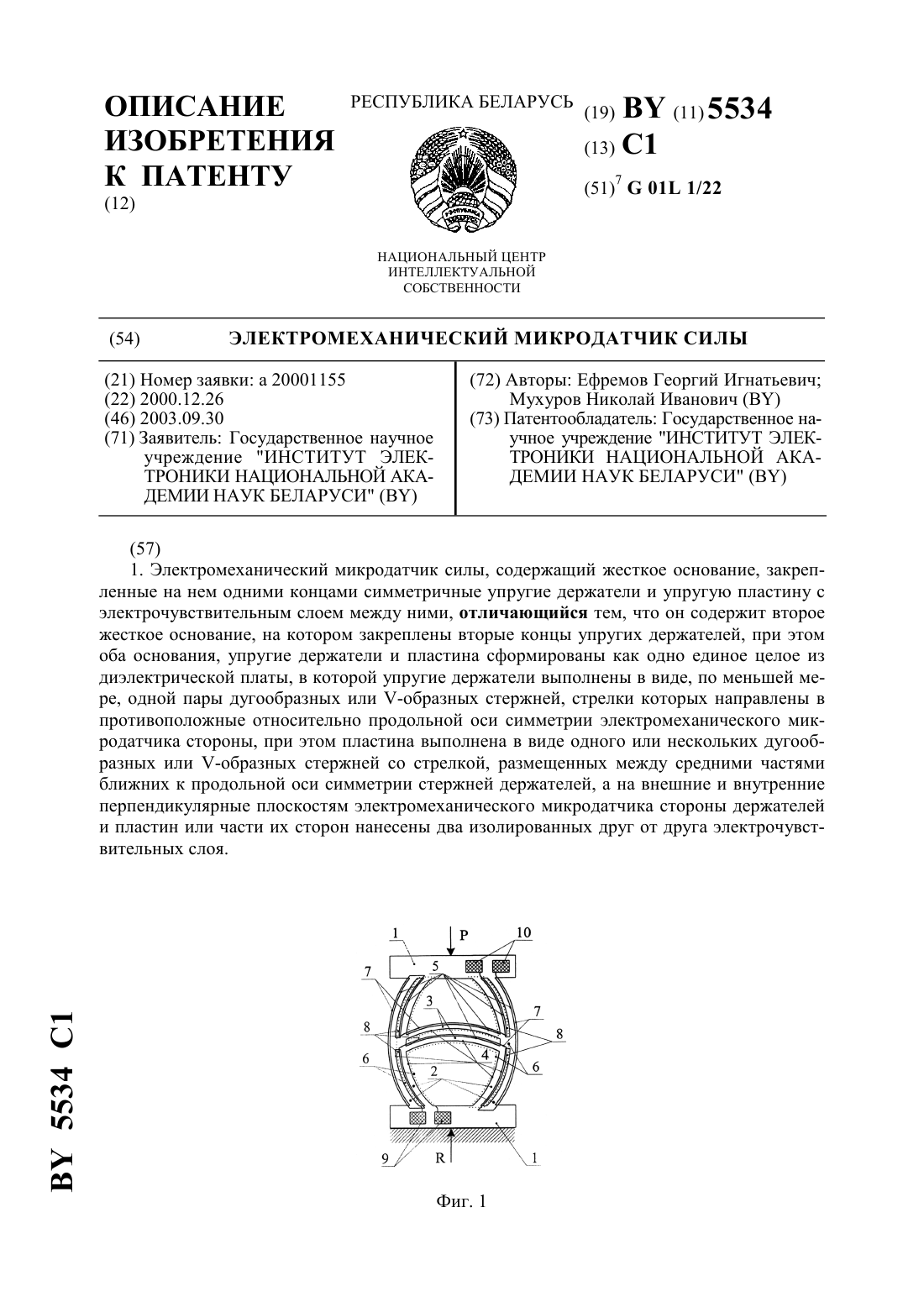
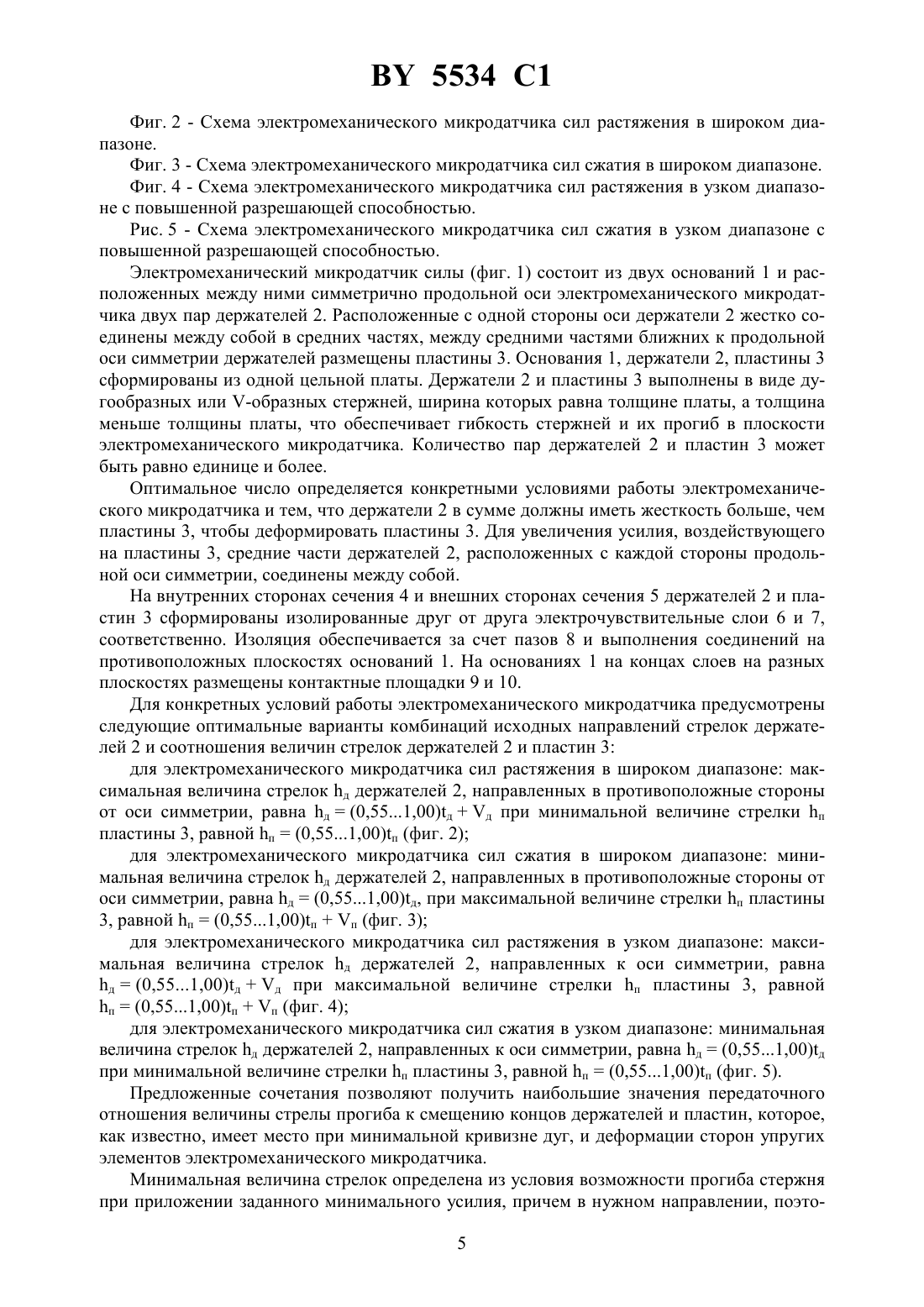
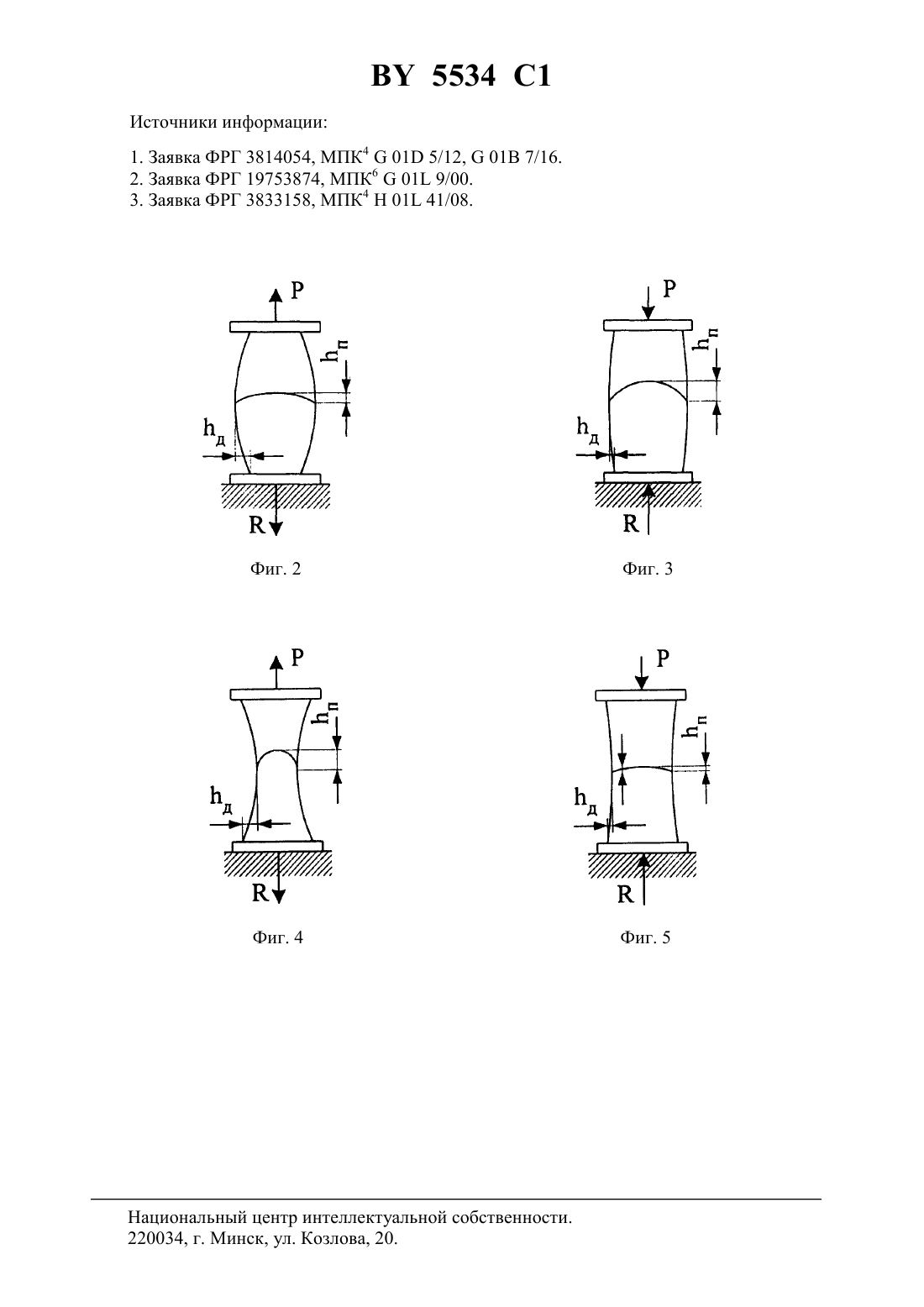
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Государственное научное учреждение ИНСТИТУТ ЭЛЕКТРОНИКИ НАЦИОНАЛЬНОЙ АКАДЕМИИ НАУК БЕЛАРУСИ(72) Авторы Ефремов Георгий Игнатьевич Мухуров Николай Иванович(73) Патентообладатель Государственное научное учреждение ИНСТИТУТ ЭЛЕКТРОНИКИ НАЦИОНАЛЬНОЙ АКАДЕМИИ НАУК БЕЛАРУСИ(57) 1. Электромеханический микродатчик силы, содержащий жесткое основание, закрепленные на нем одними концами симметричные упругие держатели и упругую пластину с электрочувствительным слоем между ними, отличающийся тем, что он содержит второе жесткое основание, на котором закреплены вторые концы упругих держателей, при этом оба основания, упругие держатели и пластина сформированы как одно единое целое из диэлектрической платы, в которой упругие держатели выполнены в виде, по меньшей мере, одной пары дугообразных или -образных стержней, стрелки которых направлены в противоположные относительно продольной оси симметрии электромеханического микродатчика стороны, при этом пластина выполнена в виде одного или нескольких дугообразных или -образных стержней со стрелкой, размещенных между средними частями ближних к продольной оси симметрии стержней держателей, а на внешние и внутренние перпендикулярные плоскостям электромеханического микродатчика стороны держателей и пластин или части их сторон нанесены два изолированных друг от друга электрочувствительных слоя. 5534 1 2. Микродатчик по п. 1, отличающийся тем, что содержит две или более пары стрежней держателей, причем их средние части, расположенные с одной стороны продольной оси симметрии электромеханического микродатчика, жестко соединены между собой. 3. Микродатчик по пп. 1 или 2, отличающийся тем, что стрелки упругих держателей направлены наружу от продольной оси симметрии электромеханического микродатчика,их величина д равна д(0,551,00)дд,где д - толщина прогиба держателей под действием приложенной внешней силы д - стрела прогиба держателей под действием приложенной внешней силы а величина стрелок пластин п равна п(0,551,00)п,где п - толщина прогиба пластин под действием приложенной внешней силы. 4. Микродатчик по пп. 1 или 2, отличающийся тем, что стрелки упругих держателей направлены наружу от продольной оси симметрии электромеханического микродатчика,их величина равна д(0,551,00)д,а величина стрелок пластин равна п(0,551,00)пп,где п - стрела прогиба пластин под действием приложенной внешней силы. 5. Микродатчик по пп. 1 или 2, отличающийся тем, что стрелки упругих держателей направлены внутрь к оси симметрии электромеханического микродатчика, их величина равна д(0,551,00)д,а величина стрелок пластин равна п(0,551,00)пп. 6. Микродатчик по пп. 1 или 2, отличающийся тем, что стрелки упругих держателей направлены внутрь к оси симметрии электромеханического микродатчика, их величина равна д(0,551,00)д,а величина стрелок пластин равна п(0,551,00)п.(56)3833158 1, 1990.3814054 1, 1989.3306729 1, 1984.2105275 1, 1998.3330879 1, 1985.3103015 1,1982.3150143 1, 1983. Изобретение относится к механике, электротехнике, автоматике и может быть использовано для измерения растягивающих и сжимающих сил и давлений, а также микроперемещений в системах контроля и регулировки силовых параметров в технологических процессах и режимах эксплуатации энергетических установок. Известен чувствительный элемент 1, реагирующий на воздействие силы, состоящий из корпуса в форме квадратной рамки и подвижного элемента квадратной формы. Подвижный элемент находится внутри квадратной рамки, а стороны подвижного элемента повернуты на определенный угол по отношению к сторонам квадратной рамки. Подвижный элемент соединяется с квадратной рамкой четырьмя несущими элементами, которые 2 5534 1 выходят под прямым углом из стенок квадратной рамки, а затем поворачиваются под углом к стенкам подвижного элемента. Квадратная рамка, подвижный элемент и несущие элементы изготовлены из монокристаллического полупроводникового материала. Несущие элементы значительно тоньше, чем квадратная рамка и подвижный элемент и на них возле стенок квадратной рамки выполнены тензометрические датчики, соединенные по электрической схеме моста. Под действием силы, направленной перпендикулярно к плоскости квадратной рамки, подвижный элемент перемещается, изгибая несущие элементы и деформируя размещенные на них тензодатчики, изменение электросопротивления которых в связи с малой площадью последних выражается очень незначительной абсолютной величиной. Данный чувствительный элемент не может выполнять измерения малых усилий с высокой точностью, т.к. внутренние механические напряжения в тензодатчиках, возникающие при их формировании, погрешность расположения приводят к изменению их первоначального сопротивления, соизмеримому с тем, которое возникает в стадии начального прогиба несущих элементов под нагрузкой. Известен силовой сенсор 2, предназначенный для измерения давления и сжимающего или растягивающего усилия. Он включает в себя сенсорный и опорный элементы и электронную микросхему обработки сигнала, смонтированные на едином кремниевом основании и выполненные по принципам пленочной микромеханической техники (ОММ ). Сенсорный элемент состоит из жесткой плоской электропроводящей подложки и закрепленной над ней в изолирующем оксидном слое упругой поликремниевой дискообразной мембраны. Объем, заключенный между подложкой и мембраной, герметично изолирован от внешней среды и может быть вакуумирован или заполнен газом. Мембрана и подложка соединены раздельными контактными дорожками с микросхемой обработки сигнала. Аналогично выполнен опорный элемент, но вместо гибкой мембраны в нем предусмотрена жесткая крышка. При воздействии внешней нагрузки мембрана сенсорного элемента прогибается, в то время как компоненты опорного элемента остаются неизменными. Сигнал о деформации мембраны в микросхеме обработки сопоставляется с данными опорного элемента и передается в исполняющую аппаратуру для выполнения заданной программы. Предусматривается, что чувствительными параметрами, сигнализирующими о деформации мембраны, могут быть изменение емкости, являющейся следствием увеличения или уменьшения межэлектродного промежутка между электропроводящей мембраной и подложкой, или изменение электрического сопротивления нанесенных на диэлектрическую мембрану тензодатчиков. Данный силовой сенсор не может с высокой точностью измерять малые усилия в результате разброса механических свойств мембраны и ее деформации при сборке сенсорного элемента. Наиболее близким по технической сущности является бистабильный датчик изгиба 3 с пьезоэлектрическим фольговым элементом, расположенным между концами двух упругих держателей в виде плоских пружин. Другие концы держателей закреплены в жестком основании. При воздействии на один из держателей механического усилия фольговый элемент прогибается в ту или другую сторону перпендикулярно своей плоскости до ограничивающих упоров. Стрела прогиба фольгового элемента значительно превышает прогиб держателя, следовательно в этой конструкции деформирование чувствительного фольгового элемента, а значит и точность измерения повышаются. Но это, в основном,относится только к тем усилиям, которые превышают критическую нагрузку, приводящую к потере фольговым элементом устойчивости. Данный бистабильный датчик изгиба не может выполнять измерение малых усилий с высокой точностью. Технической задачей изобретения является повышение точности измерения малых усилий за счет резкого увеличения деформирования чувствительного слоя с нулевого значения прилагаемого усилия. 3 5534 1 Решение технической задачи достигается тем, в электромеханическом микродатчике силы, содержащем жесткое основание, закрепленные на нем одними концами симметричные упругие держатели и упругую пластину с электрочувствительным слоем между ними,он содержит второе жесткое основание, на котором закреплены вторые концы упругих держателей, при этом оба основания, упругие держатели и пластина сформированы как одно единое целое из диэлектрической платы, в которой упругие держатели выполнены в виде, по меньшей мере, одной пары дугообразных или -образных стержней, стрелки которых направлены в противоположные относительно продольной оси симметрии электромеханического микродатчика стороны, при этом пластина выполнена в виде одного или нескольких дугообразных или -образных стержней со стрелкой, размещенных между средними частями ближних к продольной оси симметрии держателей, а на внешние и внутренние перпендикулярные плоскостям электромеханического микродатчика стороны держателей и пластин или части сторон нанесены два изолированных друг от друга электрочувствительных слоя. При этом микродатчик содержит две и более пары стержней держателей, причем их средние части, расположенные с одной стороны продольной оси симметрии электромеханического микродатчика, жестко соединены между собой. Оптимальный вариант для конкретного применения достигается, когда стрелки упругих держателей направлены наружу от продольной оси симметрии электромеханического микродатчика, их величина д равна д(0,551,00)дд, где д толщина прогиба держателей под действием приложенной внешней силы, д - стрела прогиба держателей под действием приложенной внешней силы, а величина стрелок пластин п равна п(0,551,00)п, где п - толщина прогиба пластин под действием приложенной внешней силы стрелки упругих держателей направлены наружу от продольной оси симметрии электромеханического микродатчика, их величина равна д(0,551,00)д, а величина стрелок пластин равна п(0,551,00)пп, где п - стрела прогиба пластин под действием приложенной внешней силы стрелки упругих держателей направлены внутрь к оси симметрии электромеханического микродатчика, их величина равна д(0,551,00)д, а величина стрелок пластин равна п(0,551,00)пп стрелки упругих держателей направлены внутрь к оси симметрии электромеханического микродатчика, их величина равна д(0,551,00)д, а величина стрелок пластин равна п(0,551,00)п. Предложенные особенности конструкции позволяют за счет увеличения передаточного отношения между изменением входных параметров (смещением основания) и изменением выходных параметров (стрелы прогиба пластин) существенно повысить деформацию несущих электрочувствительные слои элементов микродатчика, что обеспечивает в комплексе с большой протяженностью электрочувствительных слоев высокую точность измерения при малых значениях воздействующих сил как растяжения, так и сжатия. Сущность изобретения поясняется фиг. 1, 2, 3, 4, 5. На фиг. 1 представлен вид сверху на вариант электромеханического микродатчика силы с двумя парами держателей и двумя пластинами, на которой 1 - основание,2 - держатель,3 - пластина,4 - внутренняя сторона сечения,5 - внешняя сторона сечения,6, 7 - электрочувствительные слои,8 - паз,9, 10 - контактные площадки. 4 5534 1 Фиг. 2 - Схема электромеханического микродатчика сил растяжения в широком диапазоне. Фиг. 3 - Схема электромеханического микродатчика сил сжатия в широком диапазоне. Фиг. 4 - Схема электромеханического микродатчика сил растяжения в узком диапазоне с повышенной разрешающей способностью. Рис. 5 - Схема электромеханического микродатчика сил сжатия в узком диапазоне с повышенной разрешающей способностью. Электромеханический микродатчик силы (фиг. 1) состоит из двух оснований 1 и расположенных между ними симметрично продольной оси электромеханического микродатчика двух пар держателей 2. Расположенные с одной стороны оси держатели 2 жестко соединены между собой в средних частях, между средними частями ближних к продольной оси симметрии держателей размещены пластины 3. Основания 1, держатели 2, пластины 3 сформированы из одной цельной платы. Держатели 2 и пластины 3 выполнены в виде дугообразных или -образных стержней, ширина которых равна толщине платы, а толщина меньше толщины платы, что обеспечивает гибкость стержней и их прогиб в плоскости электромеханического микродатчика. Количество пардержателей 2 и пластин 3 может быть равно единице и более. Оптимальное число определяется конкретными условиями работы электромеханического микродатчика и тем, что держатели 2 в сумме должны иметь жесткость больше, чем пластины 3, чтобы деформировать пластины 3. Для увеличения усилия, воздействующего на пластины 3, средние части держателей 2, расположенных с каждой стороны продольной оси симметрии, соединены между собой. На внутренних сторонах сечения 4 и внешних сторонах сечения 5 держателей 2 и пластин 3 сформированы изолированные друг от друга электрочувствительные слои 6 и 7,соответственно. Изоляция обеспечивается за счет пазов 8 и выполнения соединений на противоположных плоскостях оснований 1. На основаниях 1 на концах слоев на разных плоскостях размещены контактные площадки 9 и 10. Для конкретных условий работы электромеханического микродатчика предусмотрены следующие оптимальные варианты комбинаций исходных направлений стрелок держателей 2 и соотношения величин стрелок держателей 2 и пластин 3 для электромеханического микродатчика сил растяжения в широком диапазоне максимальная величина стрелок д держателей 2, направленных в противоположные стороны от оси симметрии, равна д(0,551,00)дд при минимальной величине стрелки п пластины 3, равной п(0,551,00)п (фиг. 2) для электромеханического микродатчика сил сжатия в широком диапазоне минимальная величина стрелок д держателей 2, направленных в противоположные стороны от оси симметрии, равна д(0,551,00)д, при максимальной величине стрелки п пластины 3, равной п(0,551,00)пп (фиг. 3) для электромеханического микродатчика сил растяжения в узком диапазоне максимальная величина стрелок д держателей 2, направленных к оси симметрии, равна д(0,551,00)дд при максимальной величине стрелки п пластины 3, равной п(0,551,00)пп (фиг. 4) для электромеханического микродатчика сил сжатия в узком диапазоне минимальная величина стрелок д держателей 2, направленных к оси симметрии, равна д(0,551,00)д при минимальной величине стрелки п пластины 3, равной п(0,551,00)п (фиг. 5). Предложенные сочетания позволяют получить наибольшие значения передаточного отношения величины стрелы прогиба к смещению концов держателей и пластин, которое,как известно, имеет место при минимальной кривизне дуг, и деформации сторон упругих элементов электромеханического микродатчика. Минимальная величина стрелок определена из условия возможности прогиба стержня при приложении заданного минимального усилия, причем в нужном направлении, поэто 5 5534 1 му она составляет 0,551,00 толщины стержня, т.е. более половины его толщины. Это обеспечивает наличие плеча изгибающего момента в исходном состоянии, т.е. до приложения сил. Максимальная величина стрелок определяется суммой прогиба, являющегося следствием геометрических параметров стержней, механических свойств материала (в частности, предела упругости), диапазона внешних нагрузок и минимальной величины стрелки. Это соотношение гарантирует использование стержней в зоне минимальной кривизны, т.е. максимального передаточного отношения, и при этом исключает переход распрямляемых стержней в прямолинейную форму, чреватую их разрушением. Соединения стержней между собой и с основаниями 1 при расчете величины прогибов д и п традиционными методами теории упругости могут рассматриваться как шарнирные, поскольку стержни обладают большой длиной и гибкостью. Элементы электромеханического микродатчика могут быть изготовлены из анодного оксида алюминия, алюмооксидная технология которого, основанная на электрохимических операциях и фотолитографических процессах микроэлектроники, обеспечивает получение требуемой конфигурации деталей с прецизионной точностью. Электрочувствительные слои и контактные площадки могут быть сформированы методами плазменного распыления. Электромеханический микродатчик силы работает следующим образом. При приложении нагрузки к основанию микродатчика держатели 2 под действием внешней силы Р и реактивной силы , создающих благодаря наличию плеча изгибающий момент даже при самой малой нагрузке, деформируются, основания 1 сближаются на величину , стрелка держателей 2 возрастает (фиг. 1). Благодаря малой кривизне держателей 2 изменение величины стрелки д значительно превосходит сближение концов держателей 2. Смещаясь, средние части держателей 2 распрямляют пластины 3, что в связи с малой кривизной пластин 3 приводит к изменению п, намного превосходящему д. Двухступенчатое увеличение изменения расстояния между основаниями 1, например,при длине держателей 2 и пластин 3, равной 5 мм, обеспечивает получение передаточного отношения п/ при 0,025 мм в диапазоне 20040. Растяжение одних сторон держателей 2 и пластин 3 и сжатие других, а следовательно и нанесенных на них электрочувствительных слоев 6 и 7 происходит соответственно стреле прогиба. Абсолютную величину изменения параметров электрочувствительных слоев 6 и 7 из-за деформаций увеличивает большая протяженность чувствительных элементов,располагаемых как на пластинах 3, так и на держателях 2. В результате существенно повышается чувствительность деформируемой системы. Изменение параметров слоев через контактные площадки 9 и 10 поступает в управляющую электронную аппаратуру, где чувствительные слои могут быть включены как плечи мостовой схемы. В микродатчиках по фиг. 2 сочетаются держатели максимальной, а пластины с минимальной стрелками и, наоборот, на фиг. 3. При выпрямлении одних другие, наоборот,прогибаются больше, это обеспечивает относительную равномерность передаточного отношения в достаточно широком диапазоне. В микродатчиках растяжения по фиг. 4 держатели и пластины выполнены с максимальной величиной стрелок, в микродатчиках сжатия по фиг. 5 - с минимальной. При этих сочетаниях изменение кривизны идет в едином направлении, что резко повышает величину передаточного отношения, но при этом возрастает его градиент. Это обеспечивает повышенную точность измерений, но в более узком диапазоне. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G01L 1/22
Метки: электромеханический, микродатчик, силы
Код ссылки
<a href="https://by.patents.su/7-5534-elektromehanicheskijj-mikrodatchik-sily.html" rel="bookmark" title="База патентов Беларуси">Электромеханический микродатчик силы</a>
Электростатический микродатчик
Номер патента: 4176
Опубликовано: 30.12.2001
Авторы: Мухуров Николай Иванович, Ефремов Георгий Игнатьевич
МПК: H01H 59/00
Метки: электростатический, микродатчик
Текст:
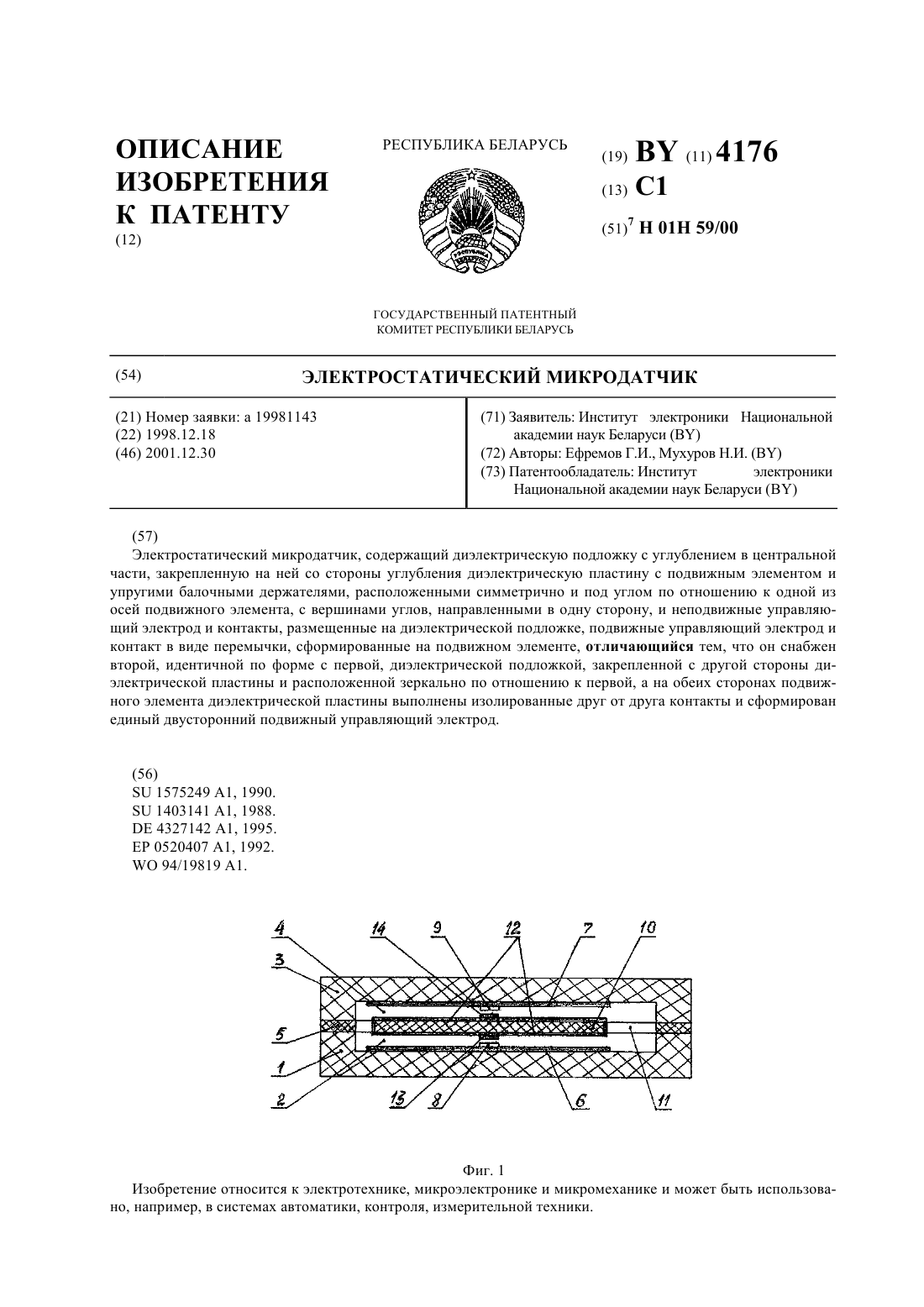
...ему наряду с выполнением функций порогового датчика быть анализатором знака полярности и величи 2 4176 1 ны наведенных зарядов, что очень важно для определения напряженностей электрических и электростатических полей отдаленных или труднодоступных объектов и их компонентов, в частности элементов космических кораблей, высоковольтных подстанций и т.п. Размещение на обеих сторонах подвижного элемента изолированных друг от друга подвижных...
Реагент для определения ионной силы или плотности мочи
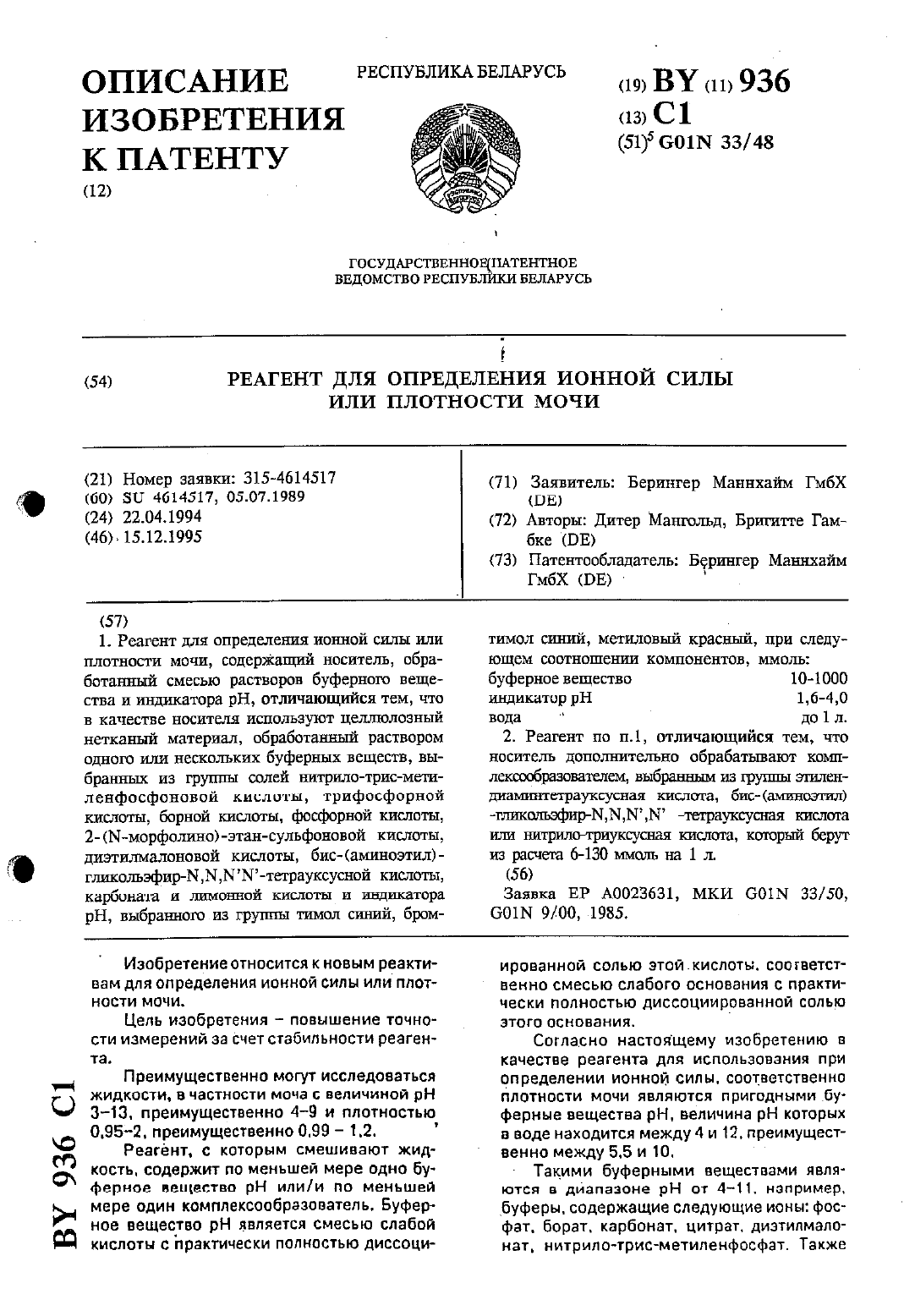
Номер патента: 936
Опубликовано: 15.12.1995
Авторы: Бригитте Гамбке, Дитер Мангольд
МПК: G01N 33/48
Метки: реагент, ионной, определения, плотности, мочи, или, силы
Текст:
...образуется пленка реактива. . . Реагентможно также наносить с помощью пленкообразуаоъцих и способных к набуханию добавок на основу. например. непосредственно на испытательную полоску. Реактив может содержать, далее. обычные добавки. такие например. как стабилизаторы. смачивающие средства или средства. вызывающие набухаНИЗ. Смешивание мочи с реагентом осуществляется таким образом. каким это являетсяцелесообразным для выбранной для...
Способ регулирования силы нажатия тормоза железнодорожного транспортного средства
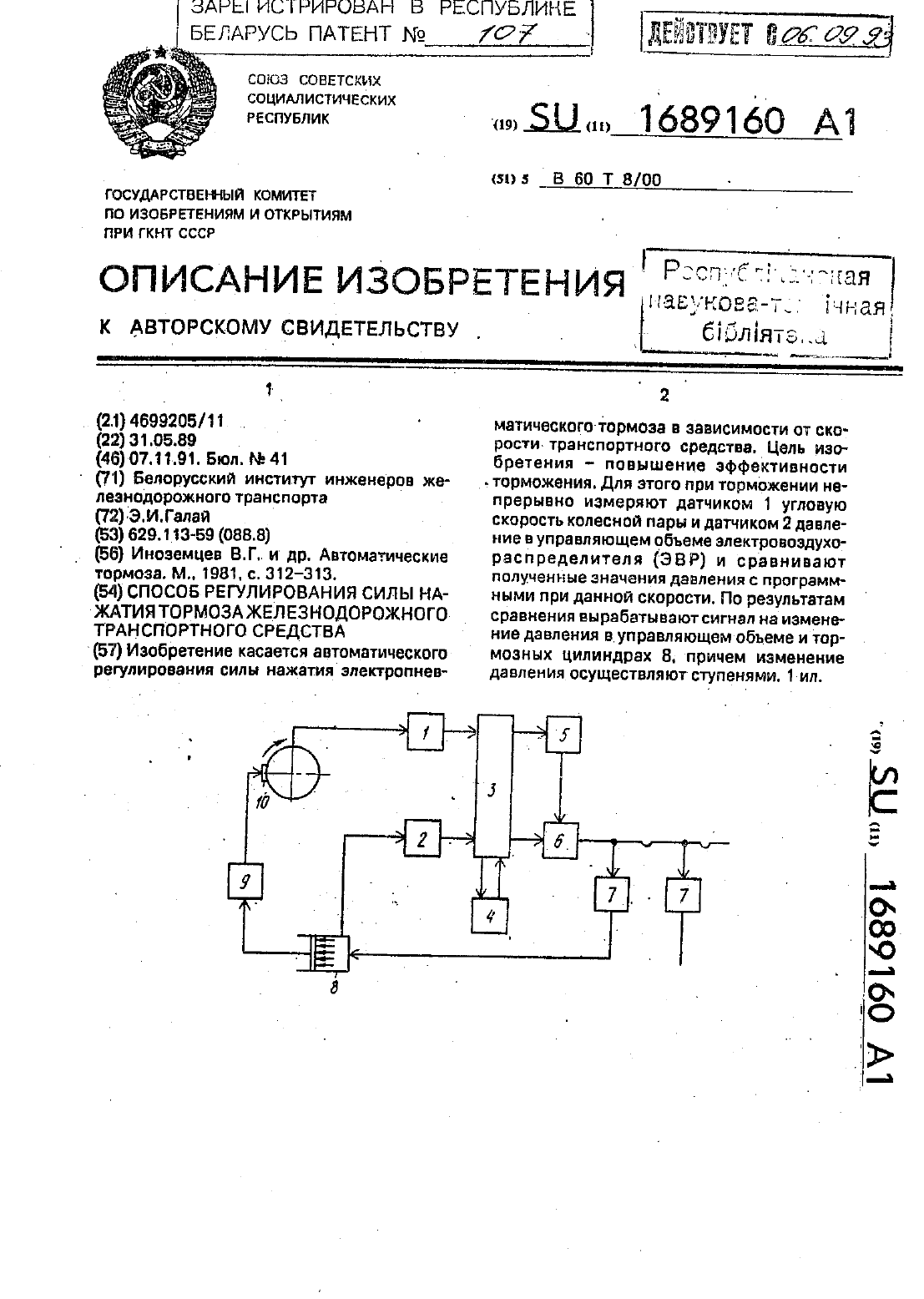
Номер патента: 107
Опубликовано: 30.09.1994
Автор: Галай Э. И.
МПК: B60T 8/00
Метки: регулирования, транспортного, тормоза, способ, силы, средства, железнодорожного, нажатия
Текст:
...давление в цилиндрах возрастает до величины. соответствующей программному значению при скорости. с которой начинается торможение. Процесс на растения давления В ЦИЛИНДПЕХ ПРОИСХОДИТ за 25-45 с. Усилие от штоков тормозных цилиндров посредством рычажной передачи 9 передается на тормозные колодки 10. Начинается торможение.Электрические сигналы от датчика 1 скорости и датчика 2 давления поступают в блок 3 сравнения. где сравниваются с...
Способ контроля оптической силы очковых линз и устройство для его реализации

Номер патента: 2207
Опубликовано: 30.06.1998
Авторы: Яничкин Валентин Викторович, Чиграй Виктор Владимирович, Спорник Николай Максимович, Туев Александр Федорович
МПК: G01N 21/01
Метки: линз, устройство, реализации, контроля, очковых, способ, силы, оптической
Текст:
...и второй фотоприемники - является не только нуль-органом, но с него также снимается информация об отклонении контролируемой линзы от номинала. Применение амплитудного модулятора, двух фотоприемников и их взаимное расположение позволяют контролировать астигматические линзы. Вытянутое изображение входной диафрагмы в плоскости модулятора поворотом линзы устанавливают перпендикулярно направлению сканирования и снимают одно значение задней...
Способ измерения силы и изгибающих моментов в болтовом соединении
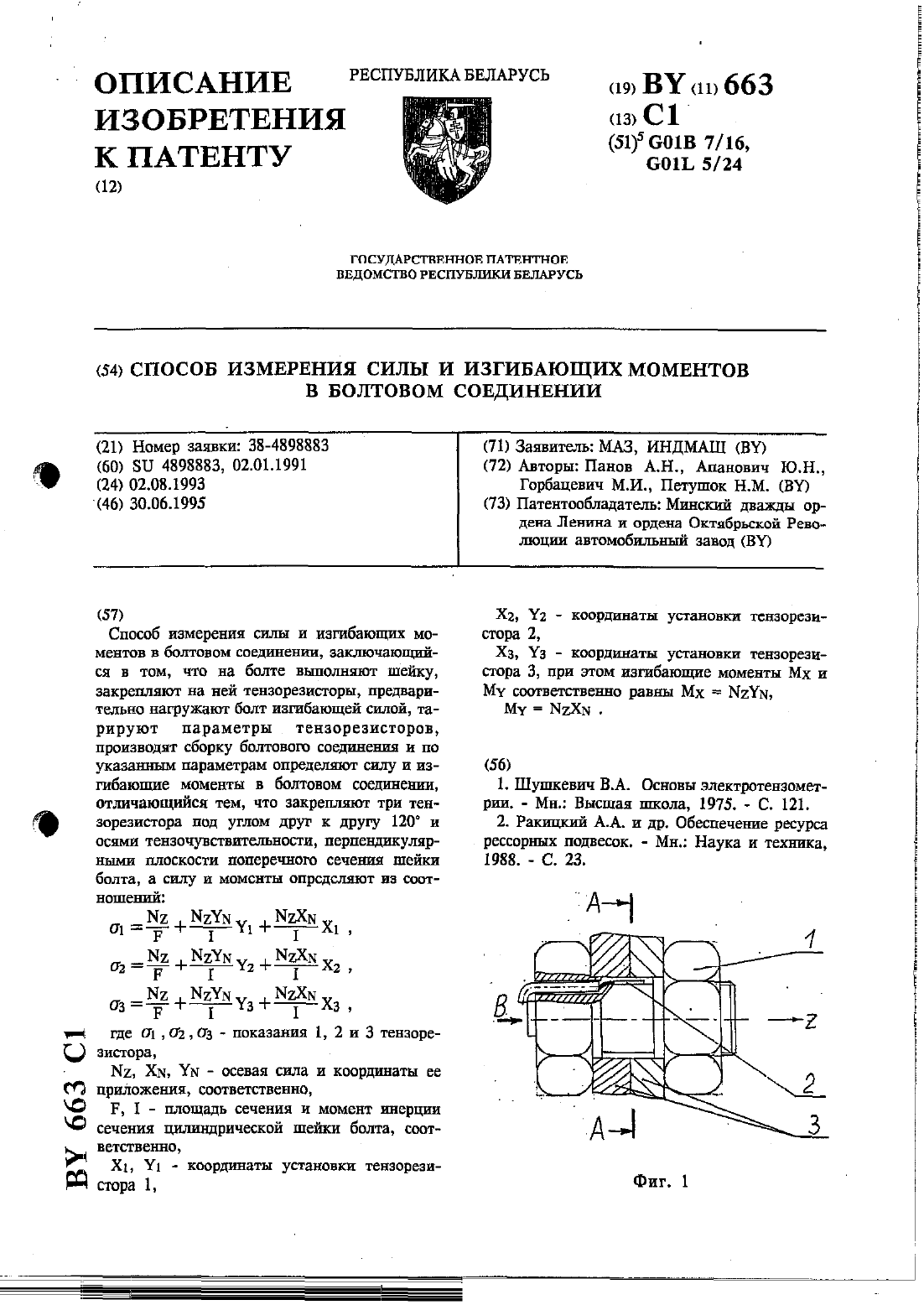
Номер патента: 663
Опубликовано: 30.06.1995
Авторы: Панов А. Н., Апанович Ю. Н., Горбацевич М. И., Петушок Н. М.
Метки: способ, соединении, изгибающих, силы, измерения, болтовом, моментов
Текст:
...момента необходимо установить на шейку тензоболта шесть тензорезисторов два для определения осевой силы (вкшочить в схему последовательно Четыре - для определения изгибающего момента(каждую пару тензорезисторов включить в свою схему параллельно) и соединить три независимых схемы.Недостатком известного способа является то,ЧТО ПРИ ОЦЕНКЕ ОДНОВРСМСННО ВСЛЕПШНЫ ОССВОЙ силы и изгибающего момента в болтах малых размеров разместить шесть...
Предыдущий патент: Устройство для переключения света автомобильных фар
Следующий патент: Устройство для гидропонного выращивания растений
Случайный патент: Способ получения паяемого покрытия на тонкой пленке алюминия