Способ определения электромагнитной постоянной времени короткозамкнутого ротора асинхронного двигателя

Текст
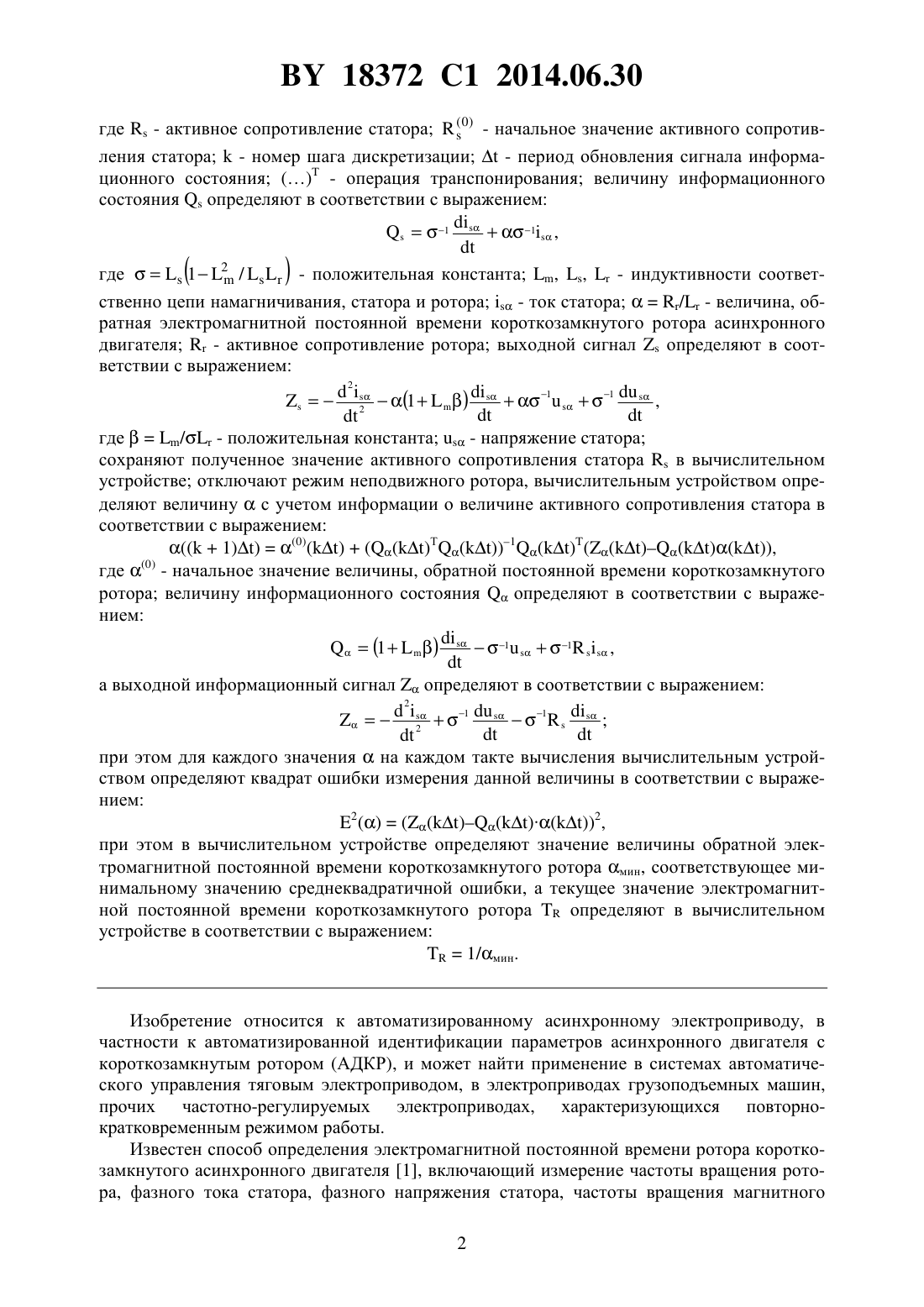
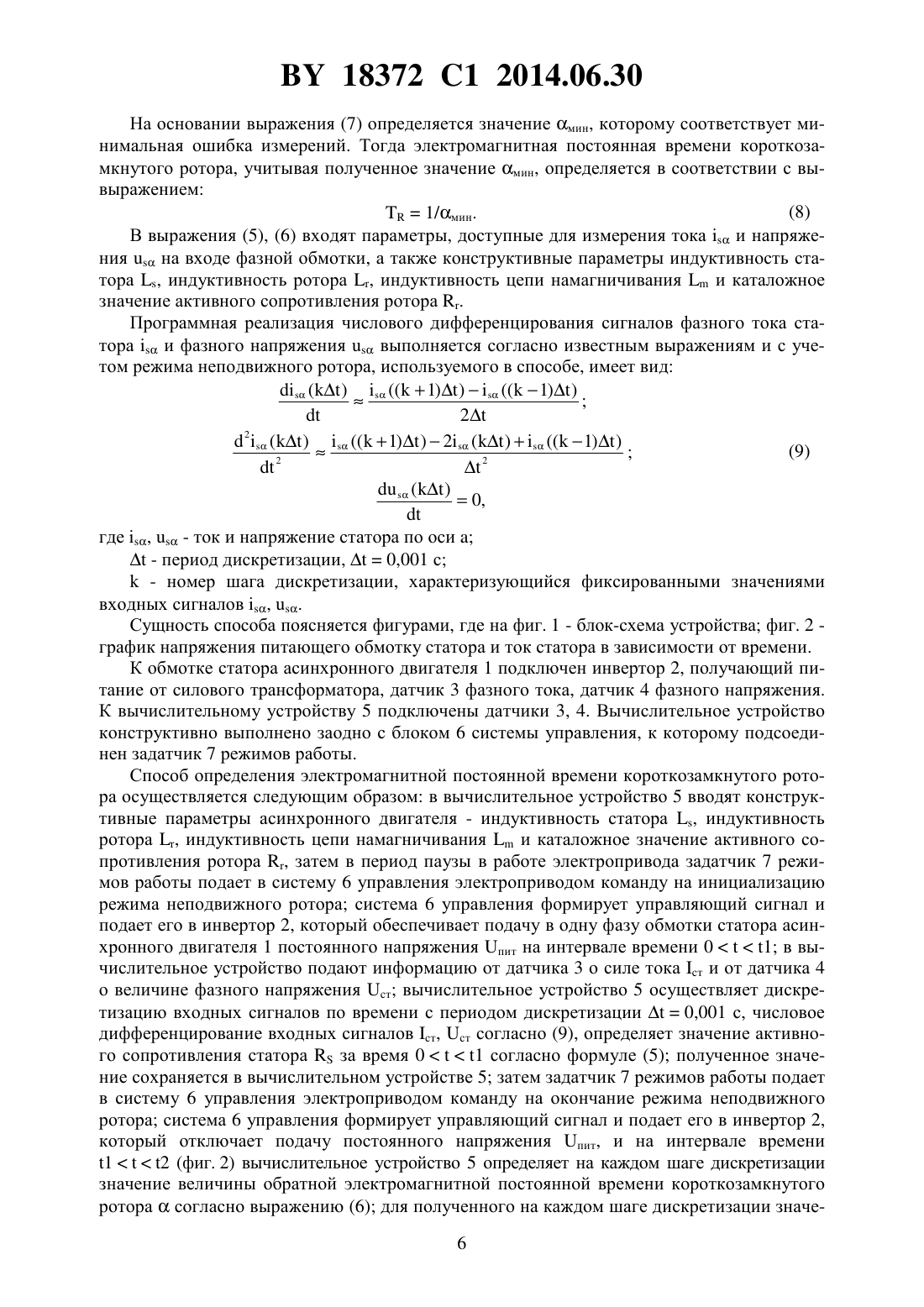
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕКТРОМАГНИТНОЙ ПОСТОЯННОЙ ВРЕМЕНИ КОРОТКОЗАМКНУТОГО РОТОРА АСИНХРОННОГО ДВИГАТЕЛЯ(71) Заявитель Белорусский национальный технический университет(72) Автор Однолько Дмитрий Сергеевич(73) Патентообладатель Белорусский национальный технический университет(57) Способ определения электромагнитной постоянной времени короткозамкнутого ротора асинхронного двигателя, включающий измерение фазного тока статора и фазного напряжения статора, управление преобразователем, питающим обмотку статора, задание режимов работы с помощью вычислительного устройства через математическую модель параметра управления, при котором в вычислительное устройство предварительно вводят значение индуктивности цепи намагничивания, отличающийся тем, что в вычислительное устройство вводят конструктивные параметры асинхронного двигателя в виде активного сопротивления обмотки ротора, индуктивности статора и ротора, а значение электромагнитной постоянной времени ротора вычисляют в режиме неподвижного ротора, при этом подают инвертором на одну фазу обмотки статора постоянное напряжение,определяют в вычислительном устройстве омическое сопротивление статора в соответствии с выражением( где- активное сопротивление статора 0) - начальное значение активного сопротивления статора- номер шага дискретизации- период обновления сигнала информационного состояния- операция транспонирования величину информационного состоянияопределяют в соответствии с выражением 11 , 2 где 1/- положительная константа , ,- индуктивности соответственно цепи намагничивания, статора и ротора- ток статора/ - величина, обратная электромагнитной постоянной времени короткозамкнутого ротора асинхронного двигателя- активное сопротивление ротора выходной сигналопределяют в соответствии с выражением 2 где/ - положительная константа- напряжение статора сохраняют полученное значение активного сопротивления статорав вычислительном устройстве отключают режим неподвижного ротора, вычислительным устройством определяют величинус учетом информации о величине активного сопротивления статора в соответствии с выражением 1(0)(Т(1,где (0) - начальное значение величины, обратной постоянной времени короткозамкнутого ротора величину информационного состоянияопределяют в соответствии с выражением(1)11, а выходной информационный сигналопределяют в соответствии с выражением 2 при этом для каждого значенияна каждом такте вычисления вычислительным устройством определяют квадрат ошибки измерения данной величины в соответствии с выражением 22,при этом в вычислительном устройстве определяют значение величины обратной электромагнитной постоянной времени короткозамкнутого ротора мин, соответствующее минимальному значению среднеквадратичной ошибки, а текущее значение электромагнитной постоянной времени короткозамкнутого ротораопределяют в вычислительном устройстве в соответствии с выражением 1/мин. Изобретение относится к автоматизированному асинхронному электроприводу, в частности к автоматизированной идентификации параметров асинхронного двигателя с короткозамкнутым ротором (АДКР), и может найти применение в системах автоматического управления тяговым электроприводом, в электроприводах грузоподъемных машин,прочих частотно-регулируемых электроприводах, характеризующихся повторнократковременным режимом работы. Известен способ определения электромагнитной постоянной времени ротора короткозамкнутого асинхронного двигателя 1, включающий измерение частоты вращения ротора, фазного тока статора, фазного напряжения статора, частоты вращения магнитного 2 18372 1 2014.06.30 поля статора, управление преобразователем, питающим обмотку статора, задание режимов работы с помощью вычислительного устройства через математическую модель параметра управления, при этом в вычислительное устройство дополнительно вводят конструктивные параметры асинхронного двигателя в виде активного сопротивления обмотки статора и индуктивности цепи намагничивания, коэффициентов рассеяния магнитных потоков статора и ротора в функции тока статора, в процессе работы вводят информацию об угле фазового сдвига между напряжением и током одной из фаз обмотки статора, а вычислительным устройством определяют электромагнитную постоянную времени ротора по математической формуле, в которую входят все параметры, которые доступны для непосредственного измерения при любом режиме работающего двигателя 011,( 01 )ск 2 где 0 - модуль полного сопротивления фазы обмотки статора равный 01 ,1 где 1 - фазное напряжение 1 - фазный ток- угол фазового сдвига между фазным током 1 и фазным напряжением 1 1 - активное сопротивление обмотки статора ск - частота скольжения ротора относительно частоты вращения магнитного поля статора 1 ск 12,где 2 - частота вращения ротора- индуктивность цепи намагничивания 1 и 2 - коэффициенты рассеяния магнитных потоков статора и ротора соответственно. Недостатком данного способа является некорректность применения теории полной мощности для анализа несинусоидальных процессов, которые имеют место в частотнорегулируемых электроприводах, ввиду несоответствия ее закону сохранения энергии. К недостаткам относится необходимость в установке датчика частоты вращения ротора. Способ неустойчив к воздействию помех и ложным срабатываниям штатных датчиков. Способ оперирует переменными, определение которых требует привлечения дополнительных вычислительных алгоритмов, которые не предусмотрены. Задачей предлагаемого способа является снижение вероятности ошибочного определения электромагнитной постоянной времени короткозамкнутого ротора, а также уменьшение количества используемых датчиков, что ведет к удешевлению его схемы. Поставленная задача решается тем, что в способе определения электромагнитной постоянной времени короткозамкнутого ротора асинхронного двигателя, включающем измерение фазного тока статора и фазного напряжения статора, управление преобразователем,питающим обмотку статора, задание режимов работы с помощью вычислительного устройства через математическую модель параметра управления, при котором в вычислительное устройство предварительно вводят значение индуктивности цепи намагничивания, в вычислительное устройство вводят конструктивные параметры асинхронного двигателя в виде активного сопротивления обмотки ротора, индуктивности статора и ротора, а значение электромагнитной постоянной времени ротора вычисляют в режиме неподвижного ротора, при этом подают инвертором на одну фазу обмотки статора постоянное напряжение, определяют в вычислительном устройстве омическое сопротивление статора в соответствии с выражением( где- активное сопротивление статора 0) - начальное значение активного сопротивления статора- номер шага дискретизации- период обновления сигнала информационного состояния- операция транспонирования величину информационного состоянияопределяют в соответствии с выражением тора и цепи намагничивания- ток статора/ - величина, обратная электромагнитной постоянной времени короткозамкнутого ротора асинхронного двигателяактивное сопротивление ротора выходной сигналопределяют в соответствии с выражением 2 где/ - положительная константа- напряжение статора сохраняют полученное значение активного сопротивления статорав вычислительном устройстве отключают режим неподвижного ротора, вычислительным устройством определяют величинус учетом информации о величине активного статорного сопротивления в соответствии с выражением 1(0)(Т(1,(0) где- начальное значение величины, обратной постоянной времени короткозамкнутого ротора величину информационного состоянияопределяют в соответствии с выражением(1)11, а выходной информационный сигналопределяют в соответствии с выражением 2 при этом для каждого значенияна каждом такте вычисления вычислительным устройством определяют квадрат ошибки измерения данной величины в соответствии с выражением 22,при этом в вычислительном устройстве определяют значение величины обратной электромагнитной постоянной времени короткозамкнутого ротора мин, соответствующее минимальному значению среднеквадратичной ошибки, а текущее значение электромагнитной постоянной времени короткозамкнутого ротораопределяют в вычислительном устройстве в соответствии с выражением 1/мин. Выражения для определения активного сопротивления статора и электромагнитной постоянной времени короткозамкнутого ротора получены следующим образом. Как известно, электромагнитные процессы в АДКР могут быть описаны в неподвижной относительно статора системе координат (-). Когда возбуждена только одна осьдвухфазной машины, ротор остается неподвижным и уравнения динамики электрической части АДКР имеют вид/-,где , ,- ток, напряжение и потокосцепление статора по оси(12 / ),/ - положительные константы/ - величина, обратная электромагнитной постоянной времени короткозамкнутого ротора асинхронного двигателя,- активные сопротивления статора и ротора , ,- индуктивность статора,ротора и цепи намагничивания. Возьмем производную правой и левой частей первого уравнения системы (1) и подставим в него второе уравнение системы (1) 2 К полученному уравнению применяем метод наименьших квадратов, при этом искомым параметром задается активное сопротивление статора . Алгоритм идентификации методом наименьших квадратов построен на том, что оценка искомого параметра определяется из условия минимума суммы квадратов ошибок измерений согласно известному статистическому методу обработки данных2 ((,,((,,,где- критерий оптимальности метода наименьших квадратов Решение оптимизационной задачи (3) позволяет получить аналитическое выражение для оценки активного сопротивления статора методом наименьших квадратов( где 0) - начальное значение активного сопротивления статора,0)0 1 - операция инвертирования. Учитывая, что заявленный способ реализуется на микропроцессорной технике, выражение (4) в дискретной форме будет иметь вид(5)1) )0) ( )( ( )(1( ) (( )( )( , - период обновления сигнала информационного состояния ,0,001 с- интервал наблюдаемости системы, характеризующийся фиксированными значениями входных сигналов , . По аналогии с (5), выражения для оценки величины обратной электромагнитной постоянной времени короткозамкнутого ротора а методом наименьших квадратов имеет вид (6)(6)1) )( 0) ( )(( )(1( )(( )( )( ,(0)- начальное значение величины обратной постоянной времени короткозамкнутого ротора, (0)0- период обновления сигнала информационного состояния ,0,001 с 2 Так как электромагнитная постоянная времени короткозамкнутого ротора наиболее явно проявляет себя в начале переходного процесса, где на вычисления значительно влияют производные тока первого и второго порядка, то полученное на каждом шаге дискретизациизначениедополнительно проверяется по критерию качества минимума среднеквадратичной ошибки 18372 1 2014.06.30 На основании выражения (7) определяется значение мин, которому соответствует минимальная ошибка измерений. Тогда электромагнитная постоянная времени короткозамкнутого ротора, учитывая полученное значение мин, определяется в соответствии с вывыражением(8)1/мин. В выражения (5), (6) входят параметры, доступные для измерения токаи напряженияна входе фазной обмотки, а также конструктивные параметры индуктивность статора , индуктивность ротора , индуктивность цепи намагничиванияи каталожное значение активного сопротивления ротора . Программная реализация числового дифференцирования сигналов фазного тока статораи фазного напряжениявыполняется согласно известным выражениям и с учетом режима неподвижного ротора, используемого в способе, имеет вид( )1) )1) ) 22( )0, где ,- ток и напряжение статора по оси- период дискретизации,0,001 с- номер шага дискретизации, характеризующийся фиксированными значениями входных сигналов , . Сущность способа поясняется фигурами, где на фиг. 1 - блок-схема устройства фиг. 2 график напряжения питающего обмотку статора и ток статора в зависимости от времени. К обмотке статора асинхронного двигателя 1 подключен инвертор 2, получающий питание от силового трансформатора, датчик 3 фазного тока, датчик 4 фазного напряжения. К вычислительному устройству 5 подключены датчики 3, 4. Вычислительное устройство конструктивно выполнено заодно с блоком 6 системы управления, к которому подсоединен задатчик 7 режимов работы. Способ определения электромагнитной постоянной времени короткозамкнутого ротора осуществляется следующим образом в вычислительное устройство 5 вводят конструктивные параметры асинхронного двигателя - индуктивность статора , индуктивность ротора , индуктивность цепи намагничиванияи каталожное значение активного сопротивления ротора , затем в период паузы в работе электропривода задатчик 7 режимов работы подает в систему 6 управления электроприводом команду на инициализацию режима неподвижного ротора система 6 управления формирует управляющий сигнал и подает его в инвертор 2, который обеспечивает подачу в одну фазу обмотки статора асинхронного двигателя 1 постоянного напряжения пит на интервале времени 01 в вычислительное устройство подают информацию от датчика 3 о силе тока ст и от датчика 4 о величине фазного напряжения ст вычислительное устройство 5 осуществляет дискретизацию входных сигналов по времени с периодом дискретизации 0,001 с, числовое дифференцирование входных сигналов ст, ст согласно (9), определяет значение активного сопротивления статораза время 01 согласно формуле (5) полученное значение сохраняется в вычислительном устройстве 5 затем задатчик 7 режимов работы подает в систему 6 управления электроприводом команду на окончание режима неподвижного ротора система 6 управления формирует управляющий сигнал и подает его в инвертор 2,который отключает подачу постоянного напряжения пит, и на интервале времени 12 (фиг. 2) вычислительное устройство 5 определяет на каждом шаге дискретизации значение величины обратной электромагнитной постоянной времени короткозамкнутого роторасогласно выражению (6) для полученного на каждом шаге дискретизации значе 6 18372 1 2014.06.30 ниявычислительным устройством 5 определяется квадрат ошибки измерений параметрасогласно выражению (7), за время 12 вычислительное устройство 5 определяет значение мин, которому соответствует минимальная ошибка измерений, и определяет значение электромагнитной постоянной времени короткозамкнутого ротора, учитывая полученное значение мин, по формуле (8) вычислительное устройство 5 подает информацию в систему 6 управления электроприводом, которая, объединив эту информацию с информацией от задатчика 7 режимов работы, управляет в дальнейшем инвертором 2, питающим асинхронный двигатель 1. Для уменьшения потребляемой двигателем мощности в режиме неподвижного ротора и, соответственно, нежелательного перегрева ротора в процессе измерения напряжение питания статорной обмотки пит должно быть как можно меньше. В результате перечисленных взаимодействий осуществляется определение электромагнитной постоянной времени короткозамкнутого ротора, снижается вероятность ее ошибочного определения и по ее величине осуществляется управление асинхронным двигателем. Источники информации 1.2374752, МПК 02 23/14, 21/1401 27/02, 31/34, 2009. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 7
МПК / Метки
МПК: G01R 31/34, H02P 23/14, H02P 21/14, G01R 27/02
Метки: двигателя, времени, асинхронного, определения, электромагнитной, короткозамкнутого, способ, постоянной, ротора
Код ссылки
<a href="https://by.patents.su/7-18372-sposob-opredeleniya-elektromagnitnojj-postoyannojj-vremeni-korotkozamknutogo-rotora-asinhronnogo-dvigatelya.html" rel="bookmark" title="База патентов Беларуси">Способ определения электромагнитной постоянной времени короткозамкнутого ротора асинхронного двигателя</a>
Способ пуска короткозамкнутого асинхронного электродвигателя с параметрическим управлением в статоре
Номер патента: 10546
Опубликовано: 30.04.2008
Авторы: Беляев Валерий Павлович, Анкуда Денис Анатольевич
МПК: H02P 7/42, H02K 17/16, H02P 1/26...
Метки: короткозамкнутого, способ, статоре, асинхронного, пуска, электродвигателя, управлением, параметрическим
Текст:
...пуска ротором асинхронного электродвигателя установившегося режима. Поставленная задача решается тем, что используется способ пуска короткозамкнутого асинхронного электродвигателя с параметрическим управлением в статоре, включающий увеличение напряжения питания, прикладываемого равномерно ко всем обмоткам статора, с заданной интенсивностью, отличающийся тем, что разгон электродвигателя в зоне скольжения 1 кр, где- скольжение...
Способ регулировки напряжения, подводимого к статору, при эксплуатации трехфазного асинхронного электродвигателя электропривода с постоянной нагрузкой ниже номинальной
Номер патента: 16925
Опубликовано: 30.04.2013
Авторы: Левшуков Николай Николаевич, Геращенко Василий Васильевич, Гайдо Владимир Казимирович, Левшуков Николай Иванович, Башаримова Валентина Николаевна, Геращенко Александр Васильевич
МПК: G01L 3/26
Метки: электродвигателя, способ, регулировки, ниже, эксплуатации, постоянной, статору, подводимого, напряжения, электропривода, номинальной, асинхронного, трехфазного, нагрузкой
Текст:
...соответствует максимально возможному коэффициенту полезного действия электродвигателя, записывают эту характеристику в виде графика,точка которого соответствует максимально возможному коэффициенту полезного действия, измеряют напряжение, подводимое к статору, и, если оно не равно номинальному,устанавливают номинальное напряжение, подводимое к статору, измеряют частоту вращения электродвигателя, определяют по графику регулировочной...
Способ пуска трехфазного асинхронного двигателя в трехфазной четырехпроводной электрической сети при исчезновении напряжения в одной из фаз
Номер патента: 9838
Опубликовано: 30.10.2007
Авторы: Поворотный Виктор Филиппович, Протосовицкий Иван Васильевич, Базулина Татьяна Геннадьевна, Сердешнов Анатолий Петрович
МПК: H02H 7/08
Метки: пуска, напряжения, трехфазной, двигателя, одной, асинхронного, сети, исчезновении, электрической, трехфазного, способ, фаз, четырехпроводной
Текст:
...задача решается тем, что в способе пуска трехфазного асинхронного двигателя путем обеспечения пускового момента пуск осуществляют в трехфазной четырехпроводной электрической сети при исчезновении напряжения питания в одной из фаз,а пусковой момент обеспечивают вращающимся магнитным полем, образуемым системой симметричных составляющих трех токов прямой последовательности, протекающих в обмотках исправных фаз, для получения которых...
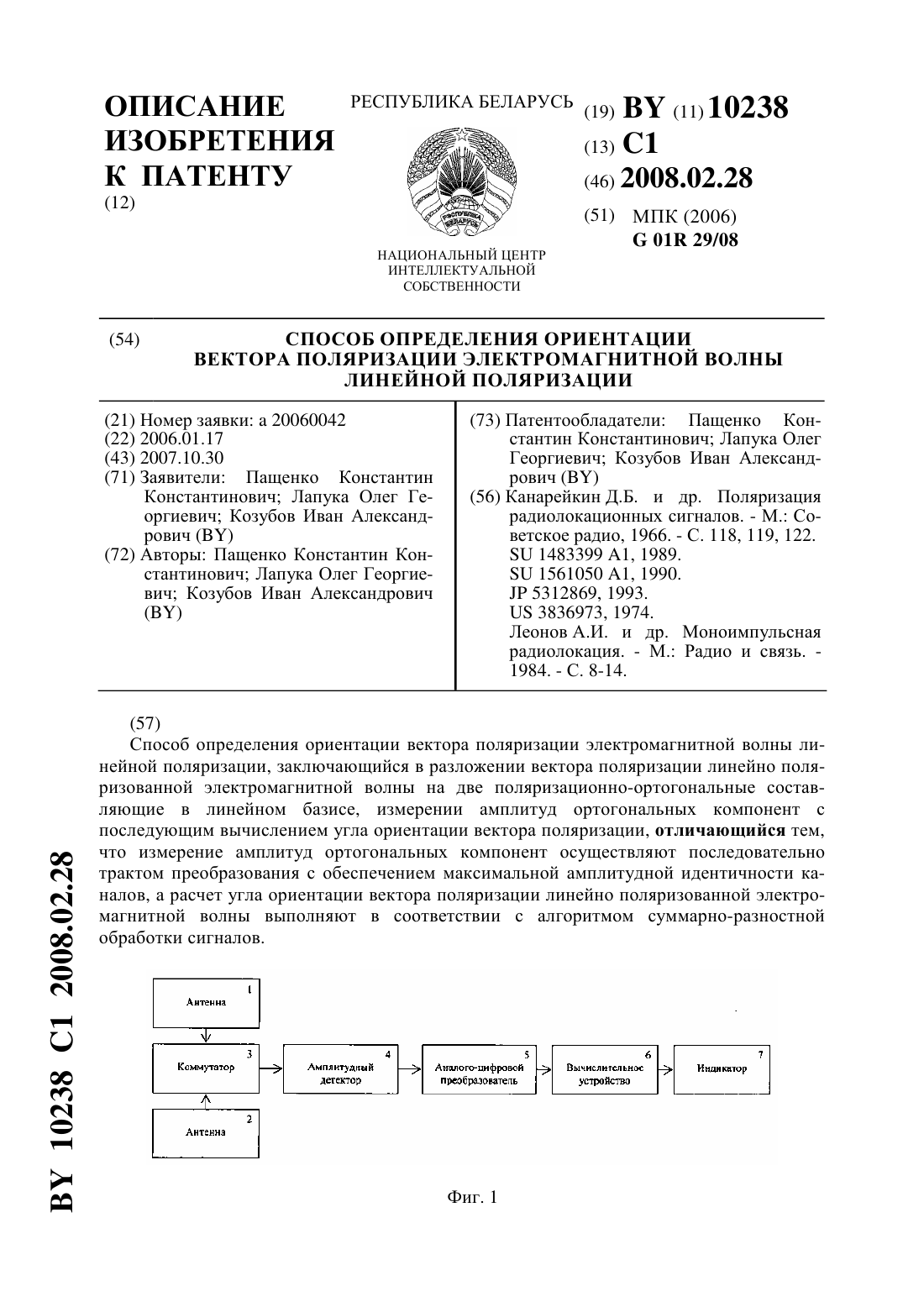
Способ определения ориентации вектора поляризации электромагнитной волны линейной поляризации
Номер патента: 10238
Опубликовано: 28.02.2008
Авторы: Козубов Иван Александрович, Пащенко Константин Константинович, Лапука Олег Георгиевич
МПК: G01R 29/08
Метки: волны, ориентации, электромагнитной, определения, поляризации, вектора, способ, линейной
Текст:
...за счет последовательной обработки поляризационных компонент единым физическим трактом. Техническим результатом заявляемого изобретения является расширение диапазонаоднозначных измерений в 2 раза, сокращение времени алгоритмической обра 4 4 ботки более чем в 2 раза, в выражении для расчета угла ориентации вектора поляризации линейно поляризованной электромагнитной волны не используются тригонометрические функции, исключение...
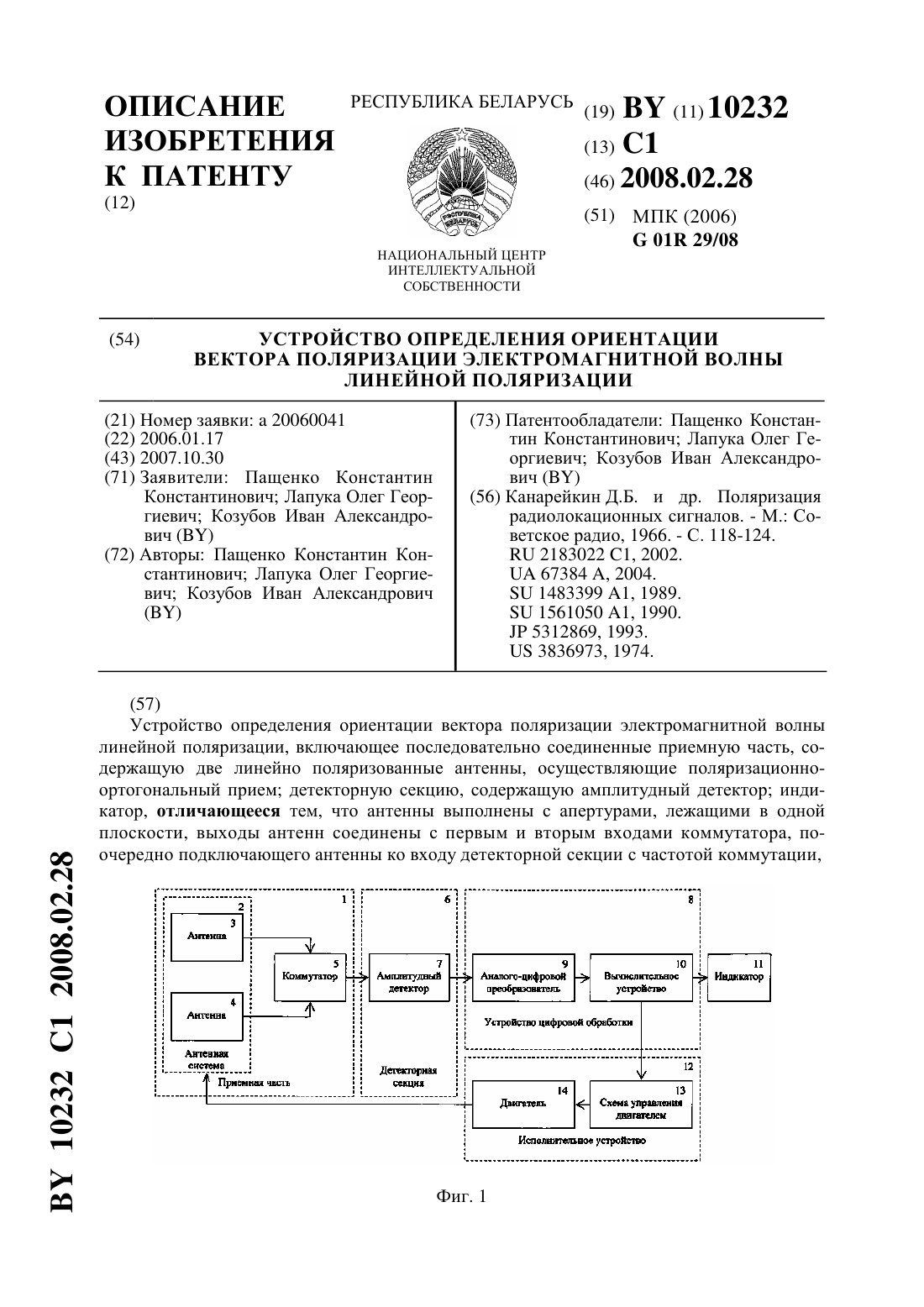
Устройство определения ориентации вектора поляризации электромагнитной волны линейной поляризации
Номер патента: 10232
Опубликовано: 28.02.2008
Авторы: Лапука Олег Георгиевич, Козубов Иван Александрович, Пащенко Константин Константинович
МПК: G01R 29/08
Метки: вектора, линейной, электромагнитной, волны, определения, устройство, поляризации, ориентации
Текст:
...На фиг. 3 представлен алгоритм подпрограммы вычисления сигнала рассогласования и периода следования шагов двигателя. На фиг. 4 представлена нелинейная дискриминационная характеристика заявляемого устройства. На фиг. 5 представлен алгоритм подпрограммы управления исполнительным устройством и вычисления углового положения антенной системы. Предлагаемое устройство содержит (фиг. 1) приемную часть 1, причем приемная часть представляет...
Предыдущий патент: Устройство для полиномиального разложения модулярных симметрических булевых функций n переменных
Следующий патент: Способ экстракции полярных липидов из биомассы бифидобактерий
Случайный патент: Способ оценки циркадного ритма частоты сердечных сокращений у больного артериальной гипертензией