Радиолокационная аппаратура приема, обработки и управления зенитного ракетного комплекса
Номер патента: U 9970
Опубликовано: 28.02.2014
Авторы: Фирсаков Александр Анатольевич, Храпун Игорь Станиславович, Маркевич Виталий Эдмундович, Шаляпин Сергей Валентинович, Папушой Виталий Иванович, Новак Владислав Андреевич
Текст
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ РАДИОЛОКАЦИОННАЯ АППАРАТУРА ПРИЕМА, ОБРАБОТКИ И УПРАВЛЕНИЯ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА(71) Заявитель Открытое акционерное общество АЛЕВКУРП(72) Авторы Папушой Виталий Иванович Шаляпин Сергей Валентинович Маркевич Виталий Эдмундович Новак Владислав Андреевич Храпун Игорь Станиславович Фирсаков Александр Анатольевич(73) Патентообладатель Открытое акционерное общество АЛЕВКУРП(57) Радиолокационная аппаратура приема, обработки и управления зенитного ракетного комплекса, содержащая объединенные по входу первый радиоприемник визирования цели(РПрЦ 1) и радиоприемник визирования ракет (РПрР), входом подключенные к выходу антенно-фидерной системы (АФС), соответствующему приемной сканирующей антенне, местный гетеродин (МГ), выходом соединенный с гетеродинным входом РПрЦ 1 и с гетеродинным входом смесителя фазирующих импульсов (СмФИ), отличающаяся тем,что выход МГ подключен к гетеродинному входу второго радиоприемника визирования цели (РПрЦ 2), сигнальный вход которого подключен к выходу АФС, соответствующему приемо-передающей антенне, выходы РПрЦ 2, РПрЦ 1, РПрР соответственно соединены с входами аналого-цифровых преобразователей (АЦП) дальномерного целевого канала(АЦПц), угломерного целевого канала (АЦПц) и ракетного канала (АЦПр), выходы АЦПц и АЦПц подключены к сигнальным цифровым входам первого и второго цифровых автокомпенсаторов помех (АКП 1 и АКП 2 соответственно), компенсационные цифровые входы которых соединены с выходом блока радиоприемников помех (РПрП) с АЦП,соединенного входами с компенсационными антеннами соответственно и гетеродинным входом подключенного к выходу МГ, выходы АКП 1 и АКП 2 соединены с сигнальными цифровыми входами первого и второго цифровых автокомпенсаторов мешающих отражений (АКМО 1 и АКМО 2 соответственно), цифровые входы фазирования которых соединены с выходом регистра фазирования (ФИ), вход которого подключен к выходу цифровой схемы разделения квадратурных составляющих, входом подключенной к выходу АЦП фазирующего импульса (АЦПфи), подключенного входом через каскад стробирования с выходом СмФИ, при этом вход стробирования каскада стробирования подключен к выходу стробирования синхронизатора, выход бланкирования которого соединен с входами бланкирования РПрЦ 2 и РПрЦ 1, выход АКМО 1 подключен к входу цифрового блока когерентного накопления сигнала (КНС) и первому входу цифрового блока измерения угловых координат постановщика активных помех, второй вход которого подключен к выходу блока РПрП с АЦП, а третий вход соединен с выходом АКМО 2, выход блока КНС подключен к объединенным по входу цифровым блокам следящего измерения скорости цели (СИЦ) и дальности цели (СИЦ), выход блока измерения угловых координат постановщика активных помех подключен к первому входу цифрового блока следящего измерения угловых координат цели (СИЦ), второй вход которого соединен с выходом АКМО 2,а третий вход подключен к выходу блока СИЦ, выход АЦПр подключен к объединенным по входу цифровым блокам следящего измерения дальности первой и второй ракет (СИ 1 и СИР 2 соответственно), а также к объединенным первым входам цифровых блоков следящего измерения угловых координат первой и второй ракет (СИ 1 и СИ 2 соответственно), вторые входы которых соединены соответственно с выходами блоков СИ 1 и СИР 2, при этом выходы блоков СИЦ, СИЦ, СИЦ, СИ 1, СИ 2, СИР 1, СИ 2 подключены к информационной шине 29, подключенной к цифровому устройству формирования команд управления ЗУР (УФК) и порту обмена, соединенному с информационной шиной антенного поста, выход УФК подключен к радиопередатчику управления ракетами, а вход СмФИ соединен с отводом направленного ответвителя, включенного в тракт передачи радиолокационного зондирующего сигнала от передатчика визирования цели к входу АФС,соответствующему приемо-передающей антенне.(56) 1. Станция СНР-125 М 1. Техническое описание. Том 3. Кабина УНК. Кн. 4. БЕ 2.000.017. - М. Воениздат, 1983. 2. Станция СНР-125 М. Техническое описание. Том 2. Антенный пост УНВ. Кн. 4. ПК 2.000.007. - М. Воениздат, 1983. 3. Основы радиолокации и радиоэлектронная борьба. Часть 1. Основы радиолокации / Под ред. А.Е.Охрименко. - М. Воениздат, 1983. 4. Неупокоев Ф.К. Стрельба зенитными ракетами. - М. Воениздат, 1991. 5. Сазонов Д.М., Гридин А.М., Мишустин Б.А. Устройства СВЧ. - М. Высшая школа,1981. 6. Гельман М.М. Аналого-цифровые преобразователи для информационно-измерительных систем. - М. Изд-во стандартов, 2009. 7. Блейхут Р. Быстрые алгоритмы цифровой обработки сигналов Пер. с англ. - М. Мир, 1989. 8. Стешенко В.В. Алгоритмы цифровой обработки сигналов реализация на ПЛИС. 99702014.02.28 Заявляемый объект относится к радиолокационным системам сопровождения и радиокомандного наведения зенитных управляемых ракет (ЗУР) и предназначен для использования в составе зенитных ракетных комплексов (ЗРК) противовоздушной обороны. Известна станция наведения ракет СНР-125 М, аппаратура которой 1, 2 обеспечивает прием отраженных радиолокационных сигналов целей и ответных сигналов наводимых ЗУР, точное определение координат цели и ЗУР путем радиолокационного следящего сопровождения по дальности и угловым координатам, формирование для передачи на борт ЗУР команд наведения. Эта аппаратура содержит радиоприемные устройства отраженных и ответных сигналов, подключенные к соответствующим выходам антенно-фидерной системы антенного поста (АП) ЗРК, устройство селекции движущихся целей, устройства следящего сопровождения цели и ЗУР по дальности и угловым координатам, устройство выработки команд управления для передачи на борт ЗУР. Недостатками данного комплекса аппаратуры являются исполнение на устаревшей аналоговой элементной базе, характеризуемой ограниченным качеством функционирования и конструктивно ограниченной эффективностью обработки радиолокационных сигналов, громоздкость и размещение в различных кабинах, что определяет обилие кабельных связей и потери сигналов в кабелях, невысокую эффективность компенсации мешающих отражений и низкую защищенность от активных маскирующих и уводящих помех. Технической задачей, на решение которой направлена заявляемая полезная модель,является устранение указанных недостатков. Заявляемая аппаратура содержит объединенные по входу первый радиоприемник 1 канала визирования цели (РПрЦ 1) и радиоприемник 2 канала визирования ЗУР (РПрР),входом подключенные к выходу антенно-фидерной системы (АФС), соответствующему приемной сканирующей в двух взаимно-ортогональных плоскостях антенне (УВ-11), местный гетеродин (МГ) 3, выходом соединенный с гетеродинным входом РПрЦ 1 1 и с гетеродинным входом смесителя 4 фазирующих импульсов (СмФИ), и отличается тем, что выход МГ 3 подключен к гетеродинному входу второго радиоприемника 5 канала визирования цели (РПрЦ 2), сигнальный вход которого подключен к выходу АФС, соответствующему приемо-передающей антенне (УВ-10), выходы РПрЦ 2 5, РПрЦ 1 1, РПрР 2 соединены соответственно с входами аналого-цифровых преобразователей (АЦП) дальномерного целевого канала (АЦПц) 6, угломерного целевого канала (АЦПц) 7 и ракетного канала (АЦПр) 8, а выходы АЦПц 6 и АЦПц 7 подключены к сигнальным цифровым входам первого и второго цифровых автокомпенсаторов помех (АКП 1) 9 и(АКП 2) 10 соответственно, компенсационные цифровые входы которых соединены с выходом блока 11 радиоприемников помех (РПрП) с АЦП, соединенного входами с компенсационными антеннами 12 соответственно и гетеродинным входом подключенного к выходу МГ 3, выходы АКП 1 9 и АКП 2 10 соединены с сигнальными цифровыми входами первого и второго цифровых автокомпенсаторов мешающих отражений (АКМО 1) 13 и(АКМО 2) 14 соответственно, цифровые входы фазирования которых соединены с выходом регистра 15 фазирования (ФИ), вход которого подключен к выходу цифровой схемы 16 разделения квадратурных составляющих, входом подключенной к выходу АЦП 17 фазирующего импульса (АЦПфи), вход которого через каскад 18 стробирования подключен к выходу СмФИ 4, при этом вход стробирования каскада 18 подключен к выходу стробирования синхронизатора 19, выход бланкирования которого соединен со входами бланкирования РПрЦ 2 5 и РПрЦ 1 1, выход АКМО 1 13 подключен к входу цифрового блока 20 когерентного накопления сигнала (КНС) и первому входу цифрового блока 21 измерения угловых координат постановщика активных помех, второй вход которого подключен к выходу блока 11 РПрП с АЦП, а третий вход соединен с выходом АКМО 2 14, выход блока 20 КНС подключен к объединенным по входу цифровым блокам следящего измерения 22 скорости цели (СИЦ) и 23 дальности цели (СИЦ), выход блока 21 измерения угловых координат постановщика активных помех подключен к первому входу цифрового блока 24 3 99702014.02.28 следящего измерения угловых координат цели (СИЦ), второй вход которого соединен с выходом АКМО 2 14, а третий вход соединен с выходом блока 23 СИЦ, выход АЦПр 8 подключен к объединенным по входу цифровым блокам 25 и 26 следящего измерения дальности первой и второй ракет (СИ 1 и СИ 2 соответственно), а также к объединенным первым входам цифровых блоков 27 и 28 следящего измерения угловых координат первой и второй ракет (СИ 1 и СИ 2 соответственно), вторые входы которых соответственно соединены с выходами блоков 25 СИ 1 и 26 СИ 2, при этом выходы блоков 22 СИЦ, 23 СИЦ, 24 СИЦ, 25 СИ 1, 26 СИ 2, 27 СИР 1, 28 СИ 2 подключены к информационной шине 29, подключенной к цифровому устройству 30 формирования команд(УФК) управления ЗУР и порту 31 обмена, соединенному с информационной шиной АП,выход УФК 30 подключен к радиопередатчику управления ракетами (РПУр), а вход СмФИ 4 соединен с отводом направленного ответвителя 32, включенного в тракт передачи радиолокационного зондирующего сигнала от передатчика визирования цели (ПРДц) к входу АФС, соответствующему приемо-передающей антенне. Такое построение аппаратуры позволяет реализовать с преобразованием в цифровую форму когерентный прием отраженных радиолокационных сигналов и помех двумя каналами дальномерным - с непрерывным радиолокационным контактом и угломерным - с использованием сканирующей антенны,за счет введения соответствующих приемных каналов с АЦП и фазирования в цифровой форме осуществлять с заданным качеством в реальном масштабе времени когерентную цифровую обработку радиолокационных сигналов и помех, эффективную автокомпенсацию активных и пассивных помех за счет введения соответствующих каналов приема и цифровых автокомпенсаторов введение цифрового канала фазирования позволяет осуществить с высоким качеством когерентный прием как пассивных помех (мешающих отражений), так и сигналов целей,что обеспечивает высокую эффективность цифровой когерентной компенсации мешающих отражений, цифрового когерентного накопления сигналов, а также следящее измерение скорости цели по допплеровской частоте и допплеровскую селекцию сигнала повышать точность следящего измерения координат цели и ракет, что обеспечивается цифровой реализацией алгоритмов оптимального измерения, сглаживания и фильтрации в блоках следящего измерения координат формировать в цифровой форме команды управления ЗУР в цифровом УФК, что позволяет реализовать широкий ассортимент методов наведения и оптимально применять их в процессе наведения ЗУР существенное сокращение массы и габаритов аппаратуры, размещение в едином конструктивном узле на АП ЗРК достигается за счет исполнения на миниатюрной цифровой элементной базе обеспечить комфортную эксплуатацию путем реализации автоматического контроля функционирования, тестирования и наладки на программном уровне. На фигуре представлена блок-схема заявляемого объекта. Заявляемая аппаратура содержит объединенные по входу РПрЦ 1 1 канала визирования цели и РПрР 2 канала визирования ЗУР, входами подключенные к выходу АФС, соответствующему приемной сканирующей антенне (УВ-11), МГ 3, выходом соединенный с гетеродинным входом РПрЦ 1 1 и с гетеродинным входом СмФИ 4, и отличается тем, что выход МГ 3 подключен к гетеродинному входу РПрЦ 2 5, сигнальный вход которого подключен к выходу АФС, соответствующему приемо-передающей антенне (УВ-10), выходы РПрЦ 2 5, РПрЦ 1 1, РПрР 2 соответственно соединены с входами АЦПц 6, АЦПц 7,АЦПр 8, а выходы АЦПц 6 и АЦПц 7 соответственно подключены к сигнальным цифровым входам АКП 1 9 и АКП 2 10, компенсационные цифровые входы которых соединены с выходом блока 11 РПрП с АЦП, соединенного сигнальными входами с компенсацион 4 99702014.02.28 ными антеннами 12 соответственно и гетеродинным входом подключенного к выходу МГ 3, выходы АКП 1 9 и АКП 2 10 соединены соответственно с сигнальными цифровыми входами АКМО 1 13 и АКМО 2 14, цифровые входы фазирования которых соединены с выходом ФИ 15, вход которого подключен к выходу цифровой схемы 16 разделения квадратурных составляющих, входом подключенной к выходу АЦПфи 17, вход которого через каскад 18 стробирования соединен с выходом СмФИ 4, при этом вход стробирования каскада 18 подключен к выходу стробирования синхронизатора 19, выход бланкирования которого соединен с входами бланкирования РПрЦ 2 5 и РПрЦ 1 1, выход цифрового АКМО 1 13 подключен к входу цифрового блока 20 КНС и первому входу цифрового блока 21 измерения угловых координат постановщика активных помех, второй вход которого подключен к выходу блока 11 РПрП с АЦП, а третий вход соединен с выходом цифрового АКМО 2 14, выход блока 20 КНС подключен к объединенным по входу цифровым блокам 22 СИЦ и 23 СИЦ, выход блока измерения угловых координат постановщика активных помех подключен к первому входу цифрового блока 24 СИЦ, второй вход которого соединен с выходом цифрового АКМО 2 14, а третий вход подключен к выходу блока 23 СИЦ, выход АЦПр 8 подключен к объединенным по входу цифровым блокам 25 СИ 1 и 26 СИ 2, а также к объединенным первым входам цифровых блоков 27 СИ 1 и 28 СИ 2,вторые входы которых соответственно соединены с выходами блоков 25 СИ 1 и 26 СИ 2,при этом выходы блоков 22 СИЦ, 23 СИЦ, 24 СИЦ, 25 СИ 1, 26 СИ 2, 27 СИР 1,28 СИ 2 подключены к информационной шине 29, подключенной к цифровому УФК 30 и порту 31 обмена, соединенному с информационной шиной АП, выход УФК 30 подключен к РПУр, а вход СмФИ 4 соединен с отводом направленного ответвителя 32, включенного в тракт передачи радиолокационного зондирующего сигнала от передатчика визирования цели ПРДц к входу АФС, соответствующему приемо-передающей антенне (УВ-10). Выходы синхронизатора 19 соединены с соответствующими входами тактирования и синхронизации цифровых блоков аппаратуры. Заявляемая аппаратура работает следующим образом. Радиолокационный зондирующий сигнал от ПРДц через направленный ответвитель 32 поступает в АФС на вход, соответствующий приемо-передающей антенне, и излучается в направлении цели. Отраженный радиолокационный сигнал с выходов АФС, соответствующих сканирующей в двух ортогональных плоскостях приемной антенне (УВ-11) и несканирующей при сопровождении цели приемо-передающей антенне (УВ-10), поступает на входы РПрЦ 1 1 и РПрЦ 2 5 соответственно, где осуществлены его селекция по несущей частоте, усиление на высокой частоте, преобразование на промежуточную частоту с использованием колебаний высокостабильного МГ 3, усиление на промежуточной частоте, а также бланкирование на время излучения зондирующего сигнала импульсом с бланкирующего выхода синхронизатора 19, автоматическая регулировка усиления и меры по расширению динамического диапазона. Соответственно радиосигналы ответчика наводимой ЗУР принимаются РПрР 2, в котором селектируются по несущей частоте, усиливаются,детектируются. Принятые сигналы с выходов приемников 5, 1, 2 соответственно поступают на входы АЦПц 6, АЦПц 7, АЦПр 8, где их преобразуют в цифровую форму, причем в дальномерном канале (АЦПц 6) преобразуется непрерывный ряд отраженных сигналов, принимаемый несканирующей приемо-передающей антенной, а в угломерном(АЦПц 7) - пачки сигналов, временное положение которых соответствует угловому положению цели в секторе сканирования, в ракетном канале (АЦПр 8) преобразуются аналогичные пачки ответных сигналов ЗУР. С выходов АЦПц 6 и АЦПц 7 сигналы цели и помехи в цифровой форме поступают соответственно в автокомпенсаторы активных помех АКП 1 9 и АКП 2 10, на компенсационные входы которых в цифровом виде поступают сигналы активных помех, принятые компенсационными антеннами 12, усиленные и преобразованные на промежуточную частоту и в цифровую форму в блоке 11 РПрП с АЦП. В автокомпенсаторах 9 и 10 в цифровой форме реализуются процедуры пространственной 5 99702014.02.28 когерентной автокомпенсации мешающих излучений 3, с. 320, после чего в автокомпенсаторах АКМО 1 13 и АКМО 2 14 осуществляют в цифровом виде реализацию процедуры когерентной автокомпенсации мешающих отражений 3, с. 205. При этом случайные от периода к периоду изменения начальной фазы зондирующих сигналов компенсируют с использованием запомненных в регистре ФИ 15 на период повторения значений квадратурных составляющих фазирующего импульса в цифровой форме, сформированных в схеме 16, на вход которой подается в цифровой форме фазирующий импульс с выхода АЦПфи 17. Собственно фазирующий импульс формируют путем стробирования в каскаде 18 части энергии зондирующего сигнала с отвода направленного ответвителя 32, преобразованного на промежуточную частоту в СмФИ 4 с использованием колебаний МГ 3. Когерентная цифровая последовательность отраженных сигналов с выхода АКМО 1 13 накапливается в цифровой форме в блоке 20 КНС в соответствии с процедурами оптимальной обработки 3, с. 207, что обеспечивает эффективное выделение сигнала цели на фоне остатков помех и шумов приемника. Выделенный сигнал поступает в цифровые устройства следящего измерения дальности и скорости - блоки СИЦ 23 и СИЦ 22 соответственно, где осуществлена реализация операций оптимального измерения дальности 3, с. 357 и скорости цели 3, с. 374 в цифровой форме. В блоке 21 формируется в цифровой форме оценка угловых координат постановщика активных помех, в том числе уводящих по направлению, с использованием выходных цифровых сигналов АКМО 2 14 угломерного канала, АКМО 1 13 несканирующего дальномерного канала и блока 11 РПрП с АЦП. В блоке 24 СИЦ осуществлена реализация операций оптимального следящего измерения угловых координат цели 3, с. 389 в цифровой форме, причем результат измерения дальности цели с выхода блока 23 СИЦ используют в блоке 24 СИЦ для селекции по дальности сигнала сопровождаемой цели. Аналогично в блоках 25 СИ 1, 26 СИ 2, 27 СИР 1, 28 СИР 2 реализуют в цифровой форме процедуры следящего сопровождения по дальности и угловым координатам первой и второй ЗУР, наводимых на цель, причем результаты измерения дальности с выходов блоков 25 СИ 1 и 26 СИ 2 используют для селекции по дальности сигналов ракет в блоках 27 СИ 1 и 28 СИ 2 соответственно. Значения текущих координат цели и ЗУР с выходов блоков СИЦ 22, СИЦ 23, СИЦ 24, СИ 1 25, СИ 2 26, СИ 1 27 и СИ 2 28 в цифровом виде поступают в информационную шину 29 заявляемой аппаратуры, которая подключена к порту 31 обмена с информационной шиной антенного поста и цифровым УФК 30. В УФК 30 в цифровом виде реализуются алгоритмы формирования команд управления ЗУР 4, а также выбор оптимального для данных условий метода наведения. Сформированные команды управления ЗУР с выхода УФК 30 поступают в радиопередатчик управления ракетами РПУр для их преобразования в радиоколебания и передачи на борт ЗУР. Синхронизатор 19 формирует сигналы, обеспечивающие согласованную по времени работу блоков и устройств аппаратуры. Блоки и устройства заявляемой аппаратуры реализуются известными методами на основе известных материалов и комплектующих, в частности направленный ответвитель известен и описан в 5,АЦП - известные, серийно выпускаемые элементы 6,блоки цифровой обработки сигналов реализуют известные алгоритмы 7 с использованием универсальных плат 8. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 6
МПК / Метки
МПК: F41G 7/20, F41G 7/30, G01S 13/06
Метки: ракетного, комплекса, управления, обработки, зенитного, аппаратура, приема, радиолокационная
Код ссылки
<a href="https://by.patents.su/6-u9970-radiolokacionnaya-apparatura-priema-obrabotki-i-upravleniya-zenitnogo-raketnogo-kompleksa.html" rel="bookmark" title="База патентов Беларуси">Радиолокационная аппаратура приема, обработки и управления зенитного ракетного комплекса</a>
Антенный пост зенитного ракетного комплекса
Номер патента: U 9430
Опубликовано: 30.08.2013
Авторы: Храпун Игорь Станиславович, Новак Владислав Андреевич, Папушой Виталий Иванович, Маркевич Виталий Эдмундович, Фирсаков Александр Анатольевич, Шаляпин Сергей Валентинович
МПК: F41G 7/20, G01S 13/06, F41G 7/30...
Метки: ракетного, зенитного, пост, антенный, комплекса
Текст:
...сигнальному входам блока 4 ПрУ, первый сигнальный вход которого соединен с соответствующим выходом АФС 1, а сигнальные выходы приемных каналов блока 4 подключены к соответствующим входам блока 27 АЦП, цифровой выход которого соединен с сигнальным цифровым входом аппаратуры 6, помеховый циф 4 94302013.08.30 ровой вход аппаратуры 6 подключен к выходу блока 28, аналоговые радиочастотные входы которого соединены с соответствующими выходами...
Транспортный модуль боевой машины грунтового ракетного комплекса
Номер патента: 14323
Опубликовано: 30.04.2011
Авторы: Виноградов Сергей Михайлович, Маненок Алексей Иванович, Зыль Николай Антонович, Хомяков Михаил Алексеевич, Мельников Валерий Юрьевич, Гончарук Игорь Анатольевич, Филиппов Алексей Иннокентьевич, Полынкин Юрий Анатольевич, Буланников Владимир Владимирович, Шарафанович Руслан Леонидович, Ботеновский Сергей Леонидович
Метки: машины, комплекса, ракетного, боевой, модуль, транспортный, грунтового
Текст:
...устройства, например, выполненного на основе электронагревателей и встроенных вентиляторов, или универсального (охлаждение и подогрев) кондиционера. Что касается условий сухого тропического климата (рабочие температуры эксплуатации от 1 до 45 С, предельные - до 55 С 3), температурный режим, характерный для морских ракет, может быть обеспечен только охлаждением воздуха в замкнутом объеме кузова посредством кондиционера. Исполнение крыши...
Устройство приема и обработки фазоманипулированных сигналов с псевдослучайной перестройкой рабочей частоты

Номер патента: U 9055
Опубликовано: 28.02.2013
Авторы: Мартинович Алексей Васильевич, Крейдик Евгений Леонидович, Чердынцев Валерий Аркадьевич, Скиб Исса Ибрагим
МПК: H04L 25/40
Метки: рабочей, частоты, обработки, перестройкой, псевдослучайной, фазоманипулированных, приема, сигналов, устройство
Текст:
...приема и обработки фазоманипулированных сигналов с псевдослучайной перестройкой рабочей частоты за счет учета состояния фазы принимаемого сигнала в моменты перестройки рабочих частот, обеспечивающего более высокую помехоустойчивость по сравнению с известными устройствами приема и обработки таких сигналов. На фиг. 1 показана структурная схема устройства приема и обработки фазоманипулированных сигналов с псевдослучайной перестройкой...
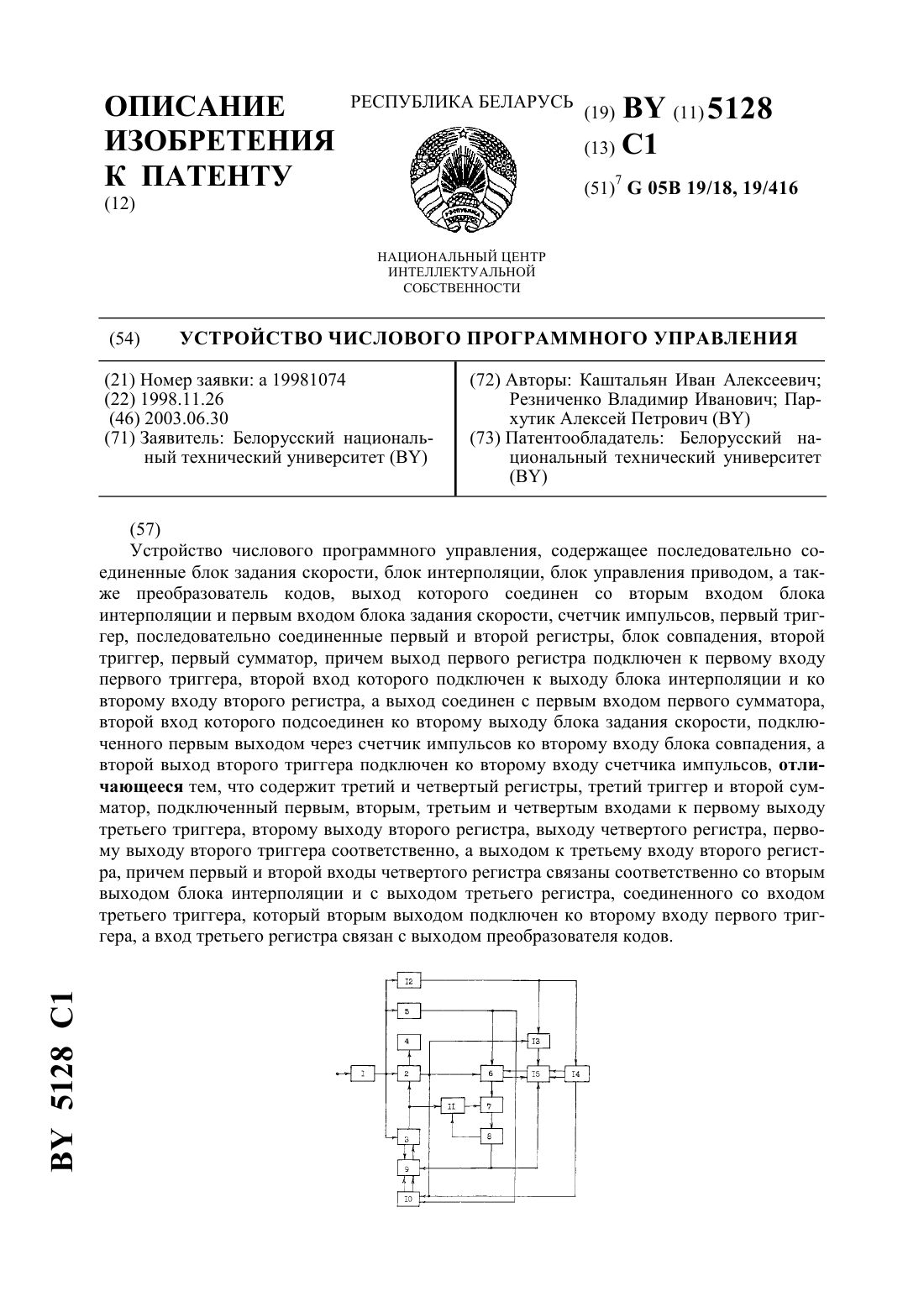
Устройство числового программного управления
Номер патента: 5128
Опубликовано: 30.06.2003
Авторы: Резниченко Владимир Иванович, Пархутик Алексей Петрович, Каштальян Иван Алексеевич
МПК: G05B 19/18, G05B 19/416
Метки: управления, устройство, числового, программного
Текст:
...введены третий и четвертый регистры, третий триггер и второй сумматор, подключенный первым, вторым, третьим и четвертым входами к первому выходу третьего триггера, второму выходу второго регистра, выходу четвертого регистра,2 5128 1 первому выходу второго триггера соответственно, а выходом к третьему входу второго регистра, причем первый и второй входы четвертого регистра связаны соответственно со вторым выходом блока интерполяции и с...
Устройство управления процессом обработки электропроводящих сред

Номер патента: 7021
Опубликовано: 30.06.2005
Авторы: Баран Александр Николаевич, Селюк Юрий Николаевич
Метки: устройство, обработки, процессом, управления, электропроводящих, сред
Текст:
...к нерациональному использованию электрической энергии. перегреву продукта. его порче и пригоранию. забиванию нагревателя и снижению надежности его работы.Задача которую рещает данное изобретение. заключается в повыщении надежности устройства и качества обрабатываемого материалаПоставленная задача рещается тем. что устройство управления процессом обработки электропроводящих сред. подключенное к источнику питания через тиристорный регулятор....
Предыдущий патент: Профиль защитный конденсатора холодильника
Следующий патент: Смеситель пенный переносной модернизированный для тушения пожаров в крупных резервуарных парках
Случайный патент: Износостойкий чугун