Джойстик
Номер патента: U 9262
Опубликовано: 30.06.2013
Авторы: Ярмолович Вячеслав Алексеевич, Анищик Виктор Михайлович
Текст
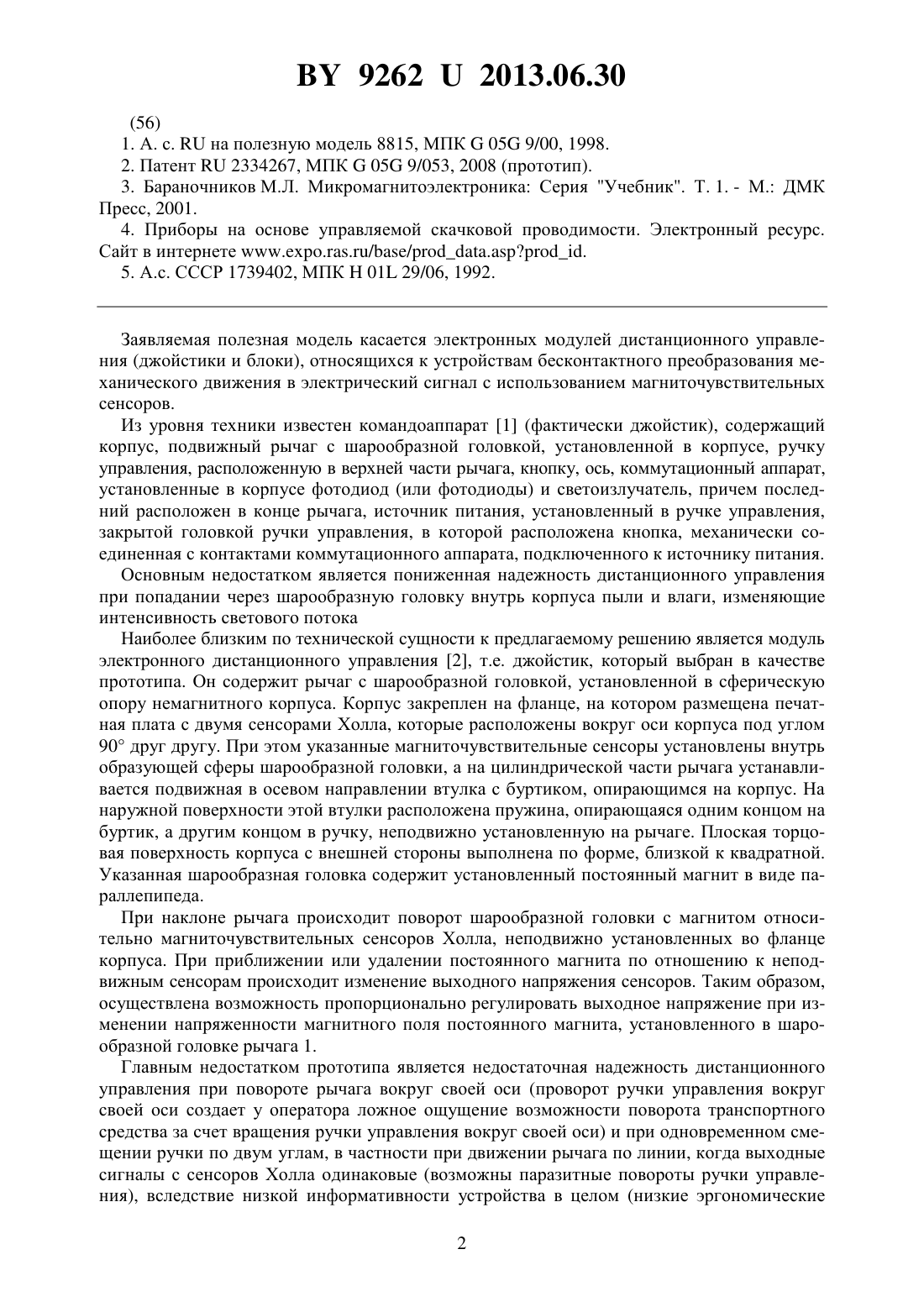
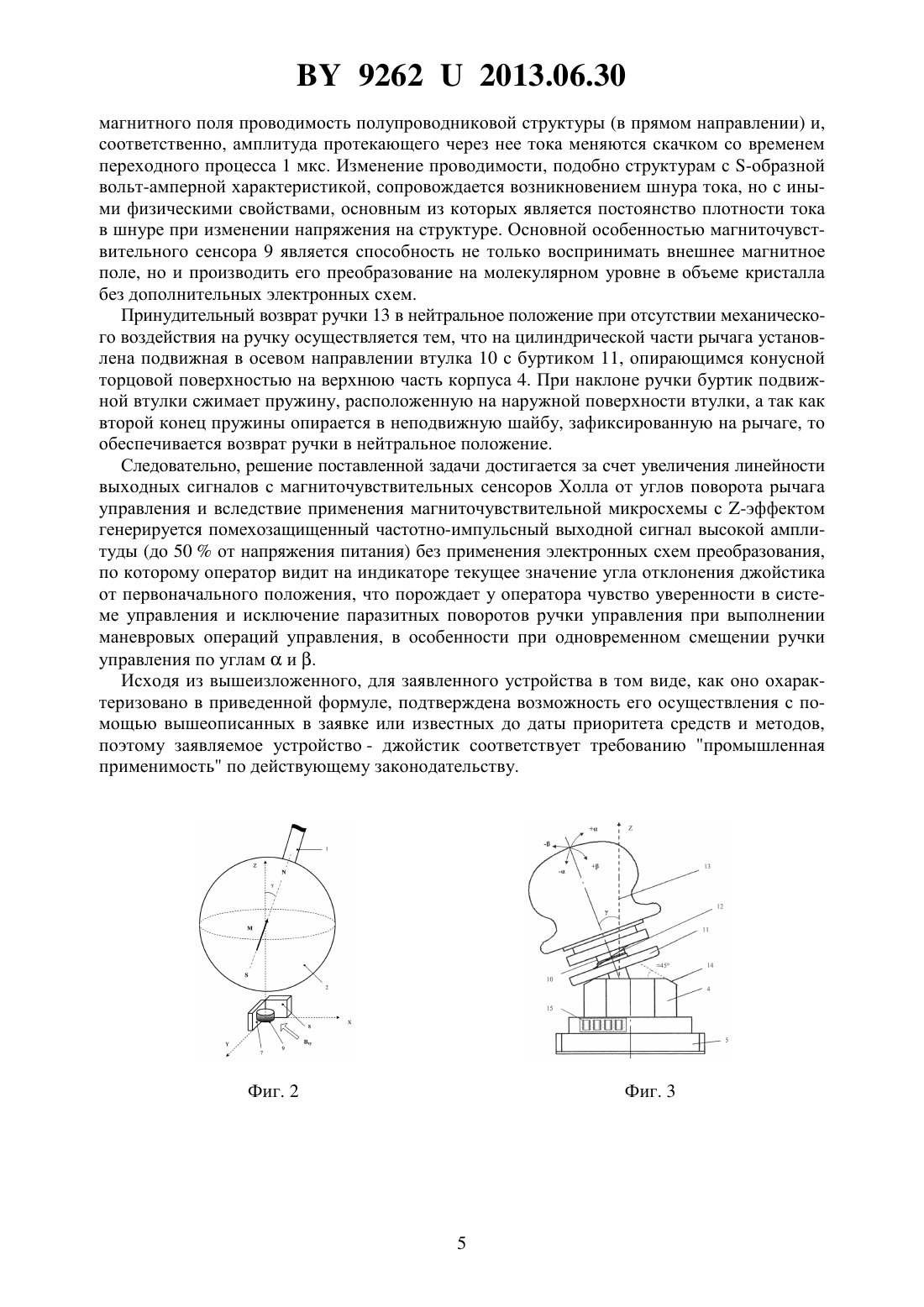
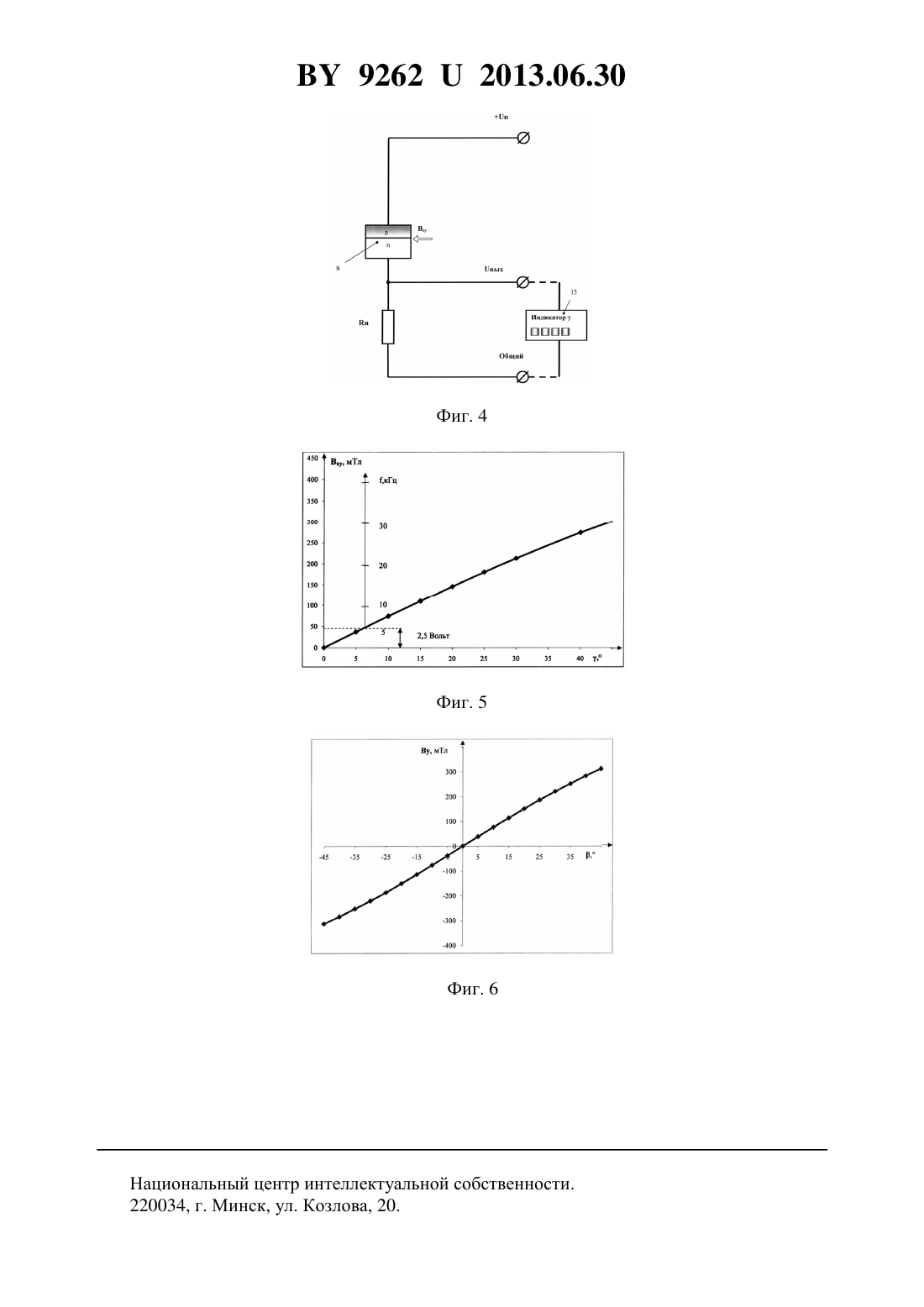
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Белорусский государственный университет(72) Авторы Анищик Виктор Михайлович Ярмолович Вячеслав Алексеевич(73) Патентообладатель Белорусский государственный университет(57) Джойстик, содержащий подвижный рычаг с шарообразной головкой, установленной в сферическую опору цилиндрического немагнитного корпуса, укрепленного на фланце, на котором размещена печатная плата с двумя магниточувствительными сенсорами Холла,расположенными вокруг оси корпуса под углом 90 друг к другу в непосредственной близости от постоянного магнита, а на цилиндрической части рычага установлена подвижная в осевом направлении втулка с буртиком, опирающимся на корпус, причем на наружной поверхности указанной втулки расположена пружина, опирающаяся одним концом на буртик, а другим концом в ручку, неподвижно установленную на указанном рычаге, отличающийся тем, что указанная шарообразная головка рычага выполнена из материала с высоким значением удельной магнитной энергии, например изили 5, с намагниченностью, параллельной или антипараллельной оси рычага, а указанная печатная плата содержит установленный с соприкосновением с указанными сенсорами Холла миниатюрный магниточувствительный цилиндрический сенсор, выполненный на основе полупроводниковой структуры типа, обладающей -эффектом и -образной вольтамперной характеристикой с возможностью генерации частотно-импульсного сигнала при величине индукции магнитного поля в области расположения указанной полупроводниковой структуры, превышающей 50 мТл, и аналогового сигнала при меньшей величине индукции магнитного поля, а на наружной поверхности корпуса закреплен индикатор положения угла отклонения указанного рычага от первоначального положения.(56) 1. А. с.на полезную модель 8815, МПК 05 9/00, 1998. 2. Патент 2334267, МПК 05 9/053, 2008 (прототип). 3. Бараночников М.Л. Микромагнитоэлектроника Серия Учебник. Т. 1. - М. ДМК Пресс, 2001. 4. Приборы на основе управляемой скачковой проводимости. Электронный ресурс. Сайт в интернете // 5. А.с. СССР 1739402, МПК 01 29/06, 1992. Заявляемая полезная модель касается электронных модулей дистанционного управления (джойстики и блоки), относящихся к устройствам бесконтактного преобразования механического движения в электрический сигнал с использованием магниточувствительных сенсоров. Из уровня техники известен командоаппарат 1 (фактически джойстик), содержащий корпус, подвижный рычаг с шарообразной головкой, установленной в корпусе, ручку управления, расположенную в верхней части рычага, кнопку, ось, коммутационный аппарат,установленные в корпусе фотодиод (или фотодиоды) и светоизлучатель, причем последний расположен в конце рычага, источник питания, установленный в ручке управления,закрытой головкой ручки управления, в которой расположена кнопка, механически соединенная с контактами коммутационного аппарата, подключенного к источнику питания. Основным недостатком является пониженная надежность дистанционного управления при попадании через шарообразную головку внутрь корпуса пыли и влаги, изменяющие интенсивность светового потока Наиболее близким по технической сущности к предлагаемому решению является модуль электронного дистанционного управления 2, т.е. джойстик, который выбран в качестве прототипа. Он содержит рычаг с шарообразной головкой, установленной в сферическую опору немагнитного корпуса. Корпус закреплен на фланце, на котором размещена печатная плата с двумя сенсорами Холла, которые расположены вокруг оси корпуса под углом 90 друг другу. При этом указанные магниточувствительные сенсоры установлены внутрь образующей сферы шарообразной головки, а на цилиндрической части рычага устанавливается подвижная в осевом направлении втулка с буртиком, опирающимся на корпус. На наружной поверхности этой втулки расположена пружина, опирающаяся одним концом на буртик, а другим концом в ручку, неподвижно установленную на рычаге. Плоская торцовая поверхность корпуса с внешней стороны выполнена по форме, близкой к квадратной. Указанная шарообразная головка содержит установленный постоянный магнит в виде параллепипеда. При наклоне рычага происходит поворот шарообразной головки с магнитом относительно магниточувствительных сенсоров Холла, неподвижно установленных во фланце корпуса. При приближении или удалении постоянного магнита по отношению к неподвижным сенсорам происходит изменение выходного напряжения сенсоров. Таким образом,осуществлена возможность пропорционально регулировать выходное напряжение при изменении напряженности магнитного поля постоянного магнита, установленного в шарообразной головке рычага 1. Главным недостатком прототипа является недостаточная надежность дистанционного управления при повороте рычага вокруг своей оси (проворот ручки управления вокруг своей оси создает у оператора ложное ощущение возможности поворота транспортного средства за счет вращения ручки управления вокруг своей оси) и при одновременном смещении ручки по двум углам, в частности при движении рычага по линии, когда выходные сигналы с сенсоров Холла одинаковые (возможны паразитные повороты ручки управления), вследствие низкой информативности устройства в целом (низкие эргономические 2 92622013.06.30 характеристики). Существенным недостатком конструкции является то, что выходные сигналы с сенсоров Холла имеют ярко выраженные нелинейности от величин углов поворота рычага, а при больших углах поворота возможна неоднозначность выходного сигнала. Указанные нелинейности значительно ухудшают эргономические характеристики устройства. Задачей, решаемой в настоящей полезной модели, является улучшение эргономических характеристик и повышение надежности дистанционного управления как за счет увеличения информативности сенсоров без усложнения механической конструкции устройства,так и увеличения линейности выходных сигналов с магниточувствительных сенсоров от углов поворота рычага управления. Для решения поставленной задачи предлагается следующая конструкция джойстика. Джойстик содержит подвижный рычаг с шарообразной головкой, установленной в сферическую опору цилиндрического немагнитного корпуса, укрепленного на фланце, на котором размещена печатная плата с двумя магниточувствительными сенсорами Холла, расположенными вокруг оси корпуса под углом 90 друг к другу в непосредственной близости от постоянного магнита, а на цилиндрической части рычага установлена подвижная в осевом направлении втулка с буртиком, опирающимся на корпус, причем на наружной поверхности указанной втулки расположена пружина, опирающаяся одним концом на буртик, а другим концом в ручку, неподвижно установленную на указанном рычаге. Он отличается тем, что указанная шарообразная головка рычага выполнена из материала с высоким значением удельной магнитной энергии, например изили 5, с намагниченностью, параллельной или антипараллельной оси рычага, а указанная печатная плата содержит установленный с соприкосновением с указанными сенсорами Холла миниатюрный магниточувствительный цилиндрический сенсор, выполненный на основе полупроводниковой структуры типа, обладающей -эффектом 3, 4, 5 и -образной вольт-амперной характеристикой с возможностью генерации частотно-импульсного сигнала при величине индукции магнитного поля в области расположения указанной полупроводниковой структуры, превышающей 50 мТл, и аналогового сигнала при меньшей величине индукции магнитного поля, а на наружной поверхности корпуса закреплен индикатор положения угла отклонения указанного рычага от первоначального положения. По мнению авторов, полезная модель содержит ряд указанных выше новых элементов,позволяющих реализовать решение поставленной задачи. Комплексный анализ изложенных отличительных признаков конструкции джойстика показывает, что они являются существенными и находятся в прямой причинно-следственной связи с достигаемым техническим результатом. Из уровня техники не выявлено технических решений, отличительные признаки которых обеспечивают решение поставленной задачи в заявляемой полезной модели. Анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявляемого устройства, показал, что заявляемый джойстик соответствует критерию новизна по действующему законодательству. Заявляемая полезная модель поясняется фиг. 1-6. На фиг. 1 изображен джойстик в разрезе по оси симметрии. На фиг. 2 показано размещение магниточувствительных сенсоров вблизи намагниченной шарообразной головки рычага. На фиг. 3 изображен джойстик при наклоне рычага управления. На фиг. 4 приведена функциональная электрическая схема подключения полупроводниковой структуры, обладающей -эффектом. На фиг. 5 приведена зависимость аналогового выходного сигнала и частотно-импульсного сигнала частотойот величины угла отклонения рычага джойстикаот первоначального положения. (Чувствительности к магнитному полю в аналоговом режиме 50 В/Тл и зависит от напряжения питания, а в частотно-импульсном режиме - 100 кГц/Тл соответственно). Магнит изс удельной энергией 40 радиусом 10 мм. Полупроводниковая структура расположена на расстоянии 2 мм от поверхности шарообразной головки. 3 92622013.06.30 На фиг. 6 приведена зависимость составляющей индукции магнитного поляот угла поворота джойстикав плоскости . Джойстик содержит немагнитный рычаг 1 с постоянным магнитом 2, выполненным в виде шарообразной головки. Шарообразная головка 2 рычага 1 установлена в сферическую немагнитную опору 3 цилиндрического корпуса 4. Сферическая опора 3 и корпус 4 могут представлять собой единую деталь или несколько собранных между собой деталей для упрощения его изготовления. Корпус 4 закреплен на фланце 5. Внутри фланца 5 размещена печатная плата 6 с сенсорами Холла 7, 8 и магниточувствительным сенсором 9 на основе полупроводниковой структуры типа, обладающая -эффектом 3, 4, 5 и -образной вольт-амперной характеристикой. Сенсоры 7 и 8 имеют возможность пропорционально регулировать выходное напряжение при изменении напряженности магнитного поля постоянного шарообразного магнита 2. Сенсоры 7 и 8 расположены вокруг осикорпуса 4 под углом 90 друг к другу. При этом сенсоры 7 и 8 установлены внутрь образующей сферы шарообразной головки 2. На цилиндрической части рычага 1 устанавливается подвижная в осевом направлении немагнитная втулка 10 с буртиком 11, опирающимся на корпус 4. На наружной поверхности втулки 10 расположена пружина 12, опирающаяся одним концом на буртик 11, а другим концом в ручку 13, неподвижно установленную на рычаг 1. Торцовая поверхность 14 корпуса 4 с внешней стороны выполнена под скос, угол которого несколько больше максимального угла наклона рычага 1, который целесообразно выполнять в 45. На наружной поверхности корпуса 4 закреплен индикатор 15 положения угла , который высвечивает указанный угол по выходному сигналу с магниточувствительного сенсора 9. Способ формирования - и -областей полупроводникового сенсора 9 подробно описан в 5. Такие магниточувствительные сенсоры поставляются фирмой, Россия,г. Москва (Институт проблем управления). Полупроводниковый сенсор 9, обладающий -эффектом, через тонкопленочной резистор нагрузкиподключен к источнику постоянного питающего напряжения п (источник питающего напряжения выполнен с функцией постоянной ЭДС, обычно 5-25 В) с соблюдением полярности, как представлено на фиг. 4. Плюс источника питания подключен к -области. Шарообразная головка 2 рычага 1 представляет собой магнит и выполнена из материала с высоким значением удельной магнитной энергии, например изили 5, с намагниченностью , параллельной оси рычага 1. Джойстик работает следующим образом. При наклоне рычага 1 происходит поворот магнитной шарообразной головки 2 относительно магниточувствительных сенсоров 7, 8, и 9,неподвижно установленных во фланце 5 корпуса 4. При этом сенсоры Холла 7 и 8 вырабатывают выходные сигналы (ЭДС), практически линейным образом зависящие от углов поворотаив двух взаимно перпендикулярных плоскостях. Эти сигналы являются сигналами электродистанционного управления подвижного объекта. При малых углахвыходной сигнал вых с магниточувствительного сенсора 9 является аналоговым (что соответствует при 50 мТл) и пропорциональным величине ,поскольку полупроводниковая структура сенсора 9 чувствительна к компоненте индукции магнитного поляи практически не чувствительна к . При 50 мТл функционирование полупроводниковой структуры 9 переходит в режим генерации частотно-импульсного сигнала с частотой , пропорциональной . При чувствительности к магнитному полю 100 кГц/Тл начальная частота составляет 5 кГц. Соответственно, на индикаторе 15 высвечивается угол , который помогает оператору электродистанционно управлять перемещением подвижных объектов, например автомобилей, тракторов, летательных аппаратов, подводных и надводных кораблей. Следует отметить, что явление управляемой скачковой проводимости (-эффект) возникает в полупроводниковых структурах с -образной вольт-амперной характеристикой 4 и заключается в том, что при определенных значениях питающего напряжения и внешнего 4 92622013.06.30 магнитного поля проводимость полупроводниковой структуры (в прямом направлении) и,соответственно, амплитуда протекающего через нее тока меняются скачком со временем переходного процесса 1 мкс. Изменение проводимости, подобно структурам с -образной вольт-амперной характеристикой, сопровождается возникновением шнура тока, но с иными физическими свойствами, основным из которых является постоянство плотности тока в шнуре при изменении напряжения на структуре. Основной особенностью магниточувствительного сенсора 9 является способность не только воспринимать внешнее магнитное поле, но и производить его преобразование на молекулярном уровне в объеме кристалла без дополнительных электронных схем. Принудительный возврат ручки 13 в нейтральное положение при отсутствии механического воздействия на ручку осуществляется тем, что на цилиндрической части рычага установлена подвижная в осевом направлении втулка 10 с буртиком 11, опирающимся конусной торцовой поверхностью на верхнюю часть корпуса 4. При наклоне ручки буртик подвижной втулки сжимает пружину, расположенную на наружной поверхности втулки, а так как второй конец пружины опирается в неподвижную шайбу, зафиксированную на рычаге, то обеспечивается возврат ручки в нейтральное положение. Следовательно, решение поставленной задачи достигается за счет увеличения линейности выходных сигналов с магниточувствительных сенсоров Холла от углов поворота рычага управления и вследствие применения магниточувствительной микросхемы с -эффектом генерируется помехозащищенный частотно-импульсный выходной сигнал высокой амплитуды (до 50 от напряжения питания) без применения электронных схем преобразования,по которому оператор видит на индикаторе текущее значение угла отклонения джойстика от первоначального положения, что порождает у оператора чувство уверенности в системе управления и исключение паразитных поворотов ручки управления при выполнении маневровых операций управления, в особенности при одновременном смещении ручки управления по углами . Исходя из вышеизложенного, для заявленного устройства в том виде, как оно охарактеризовано в приведенной формуле, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных до даты приоритета средств и методов,поэтому заявляемое устройство - джойстик соответствует требованию промышленная применимость по действующему законодательству. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 6
МПК / Метки
МПК: G05G 9/053
Метки: джойстик
Код ссылки
<a href="https://by.patents.su/6-u9262-dzhojjstik.html" rel="bookmark" title="База патентов Беларуси">Джойстик</a>
Датчик Холла
Номер патента: U 92
Опубликовано: 30.03.2000
Автор: Белокурский Юрий Иванович
МПК: G01R 33/00, H01L 43/00
Текст:
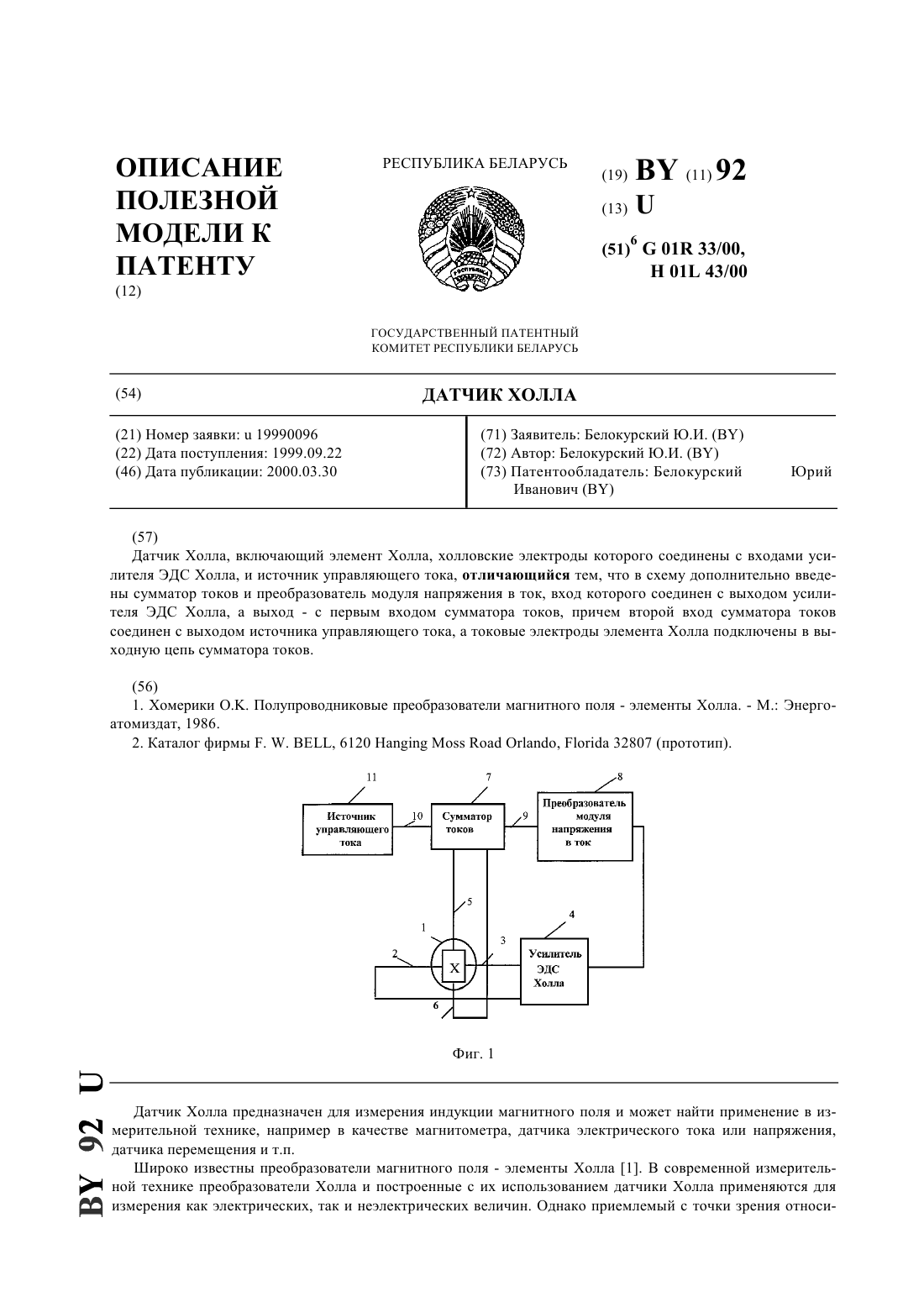
...сумматор токов и преобразователь модуля напряжения в ток, причем вход последнего соединен с выходом усилителя ЭДС Холла, а его выход соединен с первым входом сумматора. Второй вход сумматора токов соединен с выходом источника управляющего тока. Токовые же электроды элемента Холла подключены в выходную цепь сумматора токов. На фиг. 1 представлена схема предлагаемого датчика Холла. На фиг. 2 показан график выходной характеристики датчика...
Устройство для измерения линейных перемещений
Номер патента: 6381
Опубликовано: 30.09.2004
Авторы: Кособуцкий Евгений Иванович, Чудовский Александр Константинович, Власов Владимир Вениаминович, Демченко Александр Иванович, Серяков Виктор Михайлович, Бойков Александр Евгеньевич
МПК: G01B 7/00
Метки: перемещений, устройство, измерения, линейных
Текст:
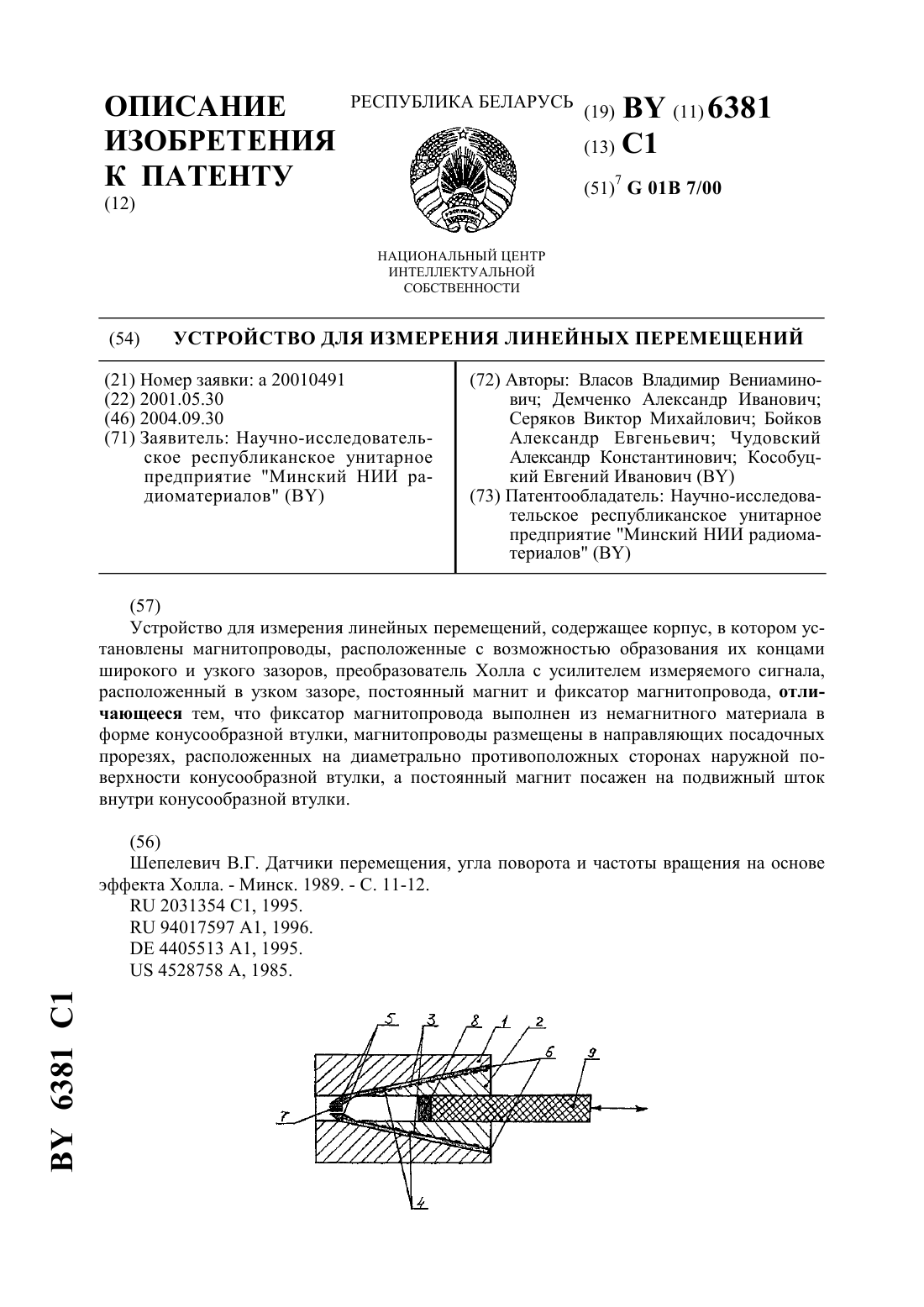
...решается тем, что в устройстве для измерения линейных перемещений, содержащем корпус, в котором установлены магнитопроводы, расположенные с возможностью образования их концами широкого и узкого зазоров, преобразователь Холла с усилителем измеряемого сигнала, расположенный в узком зазоре, постоянный магнит и фиксатор магнитопровода, - фиксатор магнитопровода выполнен из немагнитного материала в форме конусообразной втулки, магнитопроводы...
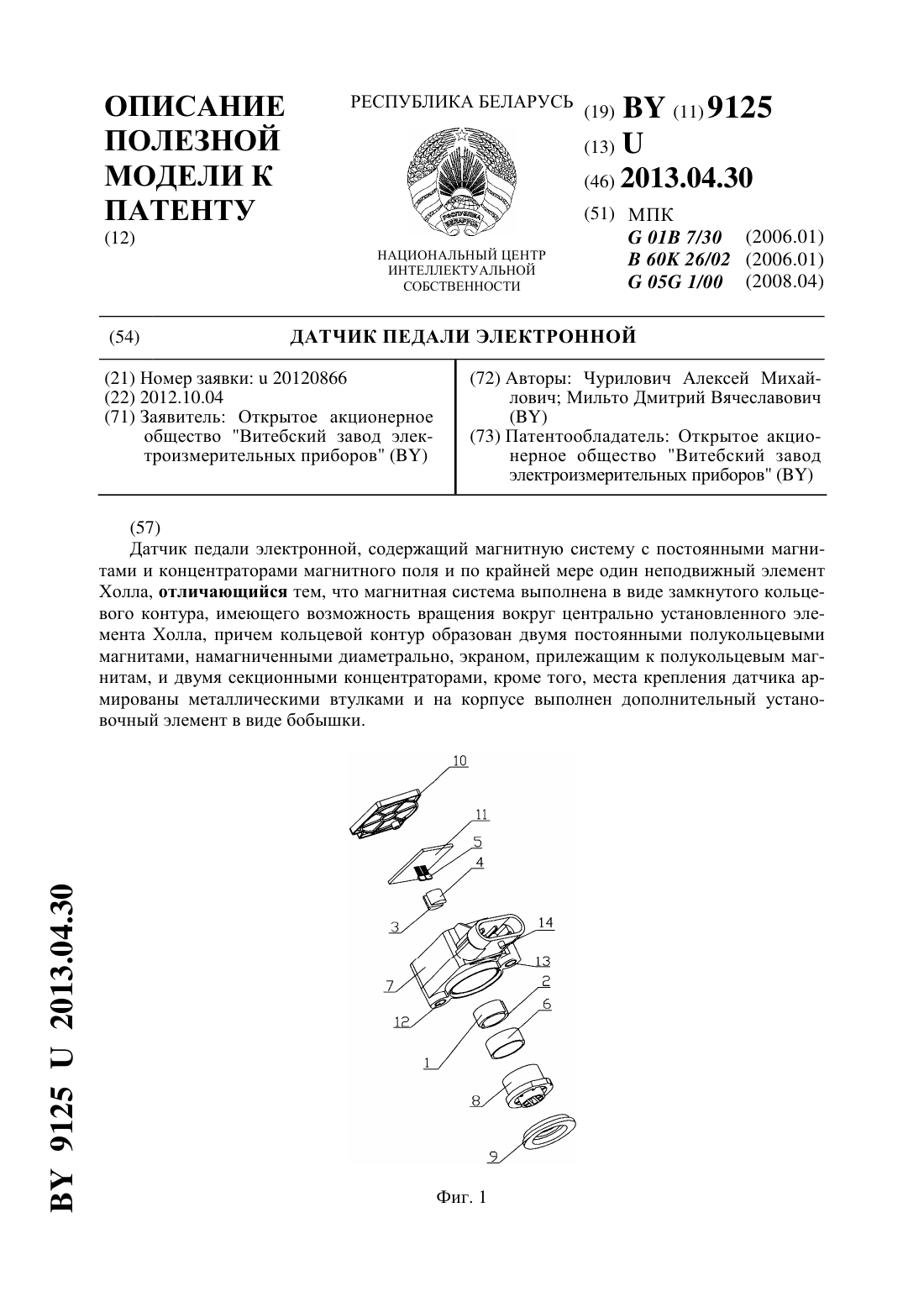
Датчик педали электронной
Номер патента: U 9125
Опубликовано: 30.04.2013
Авторы: Чурилович Алексей Михайлович, Мильто Дмитрий Вячеславович
МПК: B60K 26/02, G05G 1/00, G01B 7/30...
Метки: педали, электронной, датчик
Текст:
...полукольцевыми магнитами, намагниченными диаметрально, экраном, прилежащим к полукольцевым магнитам, и двумя секционными концентраторами. С целью усиления жесткости и предотвращения повреждения корпуса при установке места крепления датчика армированы металлическими втулками. Для исключения люфта датчика при установке на педаль предусмотрен дополнительный установочный элемент в виде бобышки. Техническая сущность полезной модели...
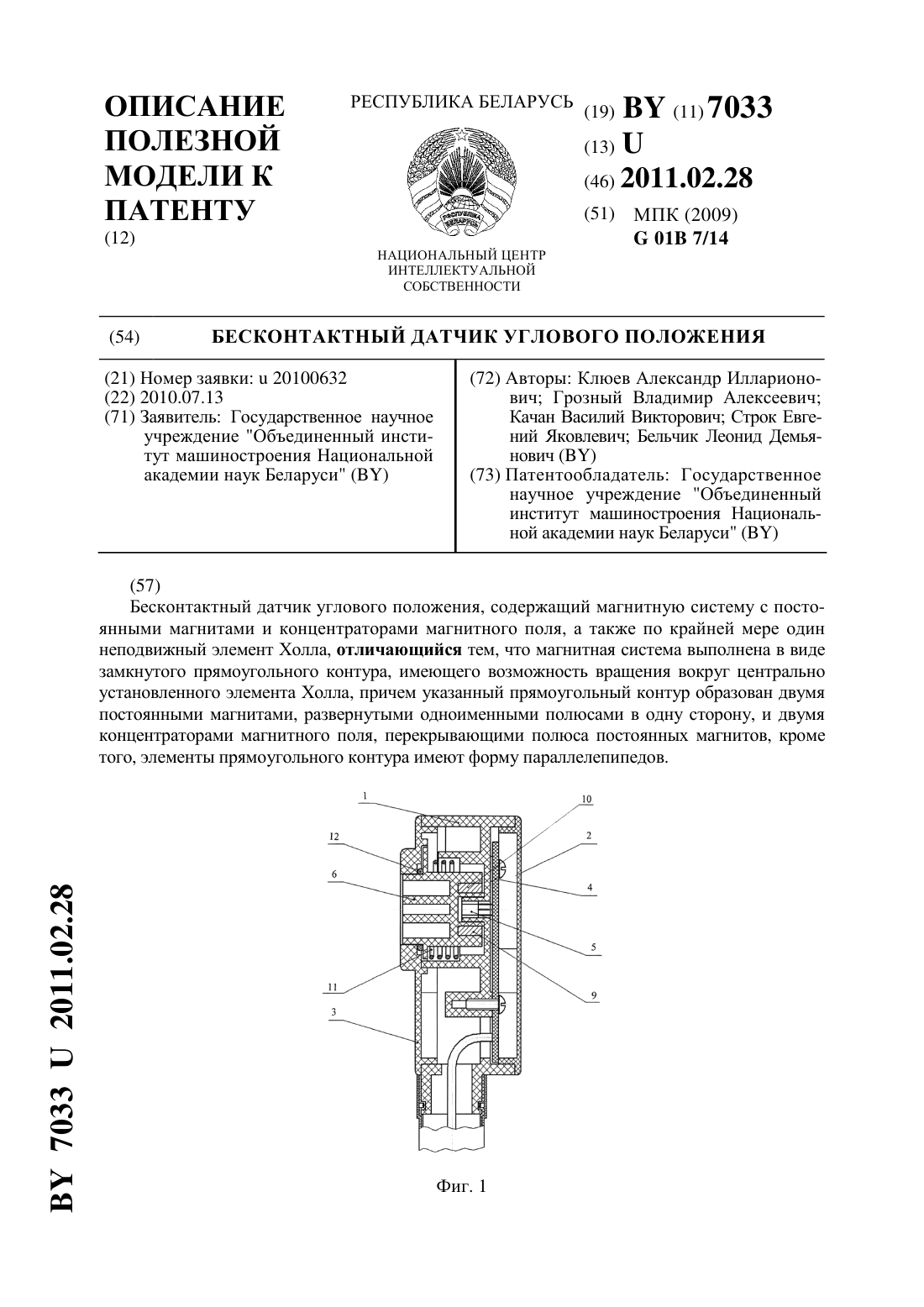
Бесконтактный датчик углового положения
Номер патента: U 7033
Опубликовано: 28.02.2011
Авторы: Строк Евгений Яковлевич, Бельчик Леонид Демьянович, Качан Василий Викторович, Клюев Александр Илларионович, Грозный Владимир Алексеевич
МПК: G01B 7/14
Метки: датчик, углового, положения, бесконтактный
Текст:
...магнита относительно оси, проходящей между концентраторами, происходит перераспределение магнитного потока внутри магнитной системы,величина которого измеряется элементами Холла. Недостатками известного датчика являются низкая помехозащищенность из-за разомкнутой магнитной системы, нетехнологичность изготовления и сборки при относительно больших габаритных размерах. Задачей настоящей полезной модели является повышение помехоустойчивости к...
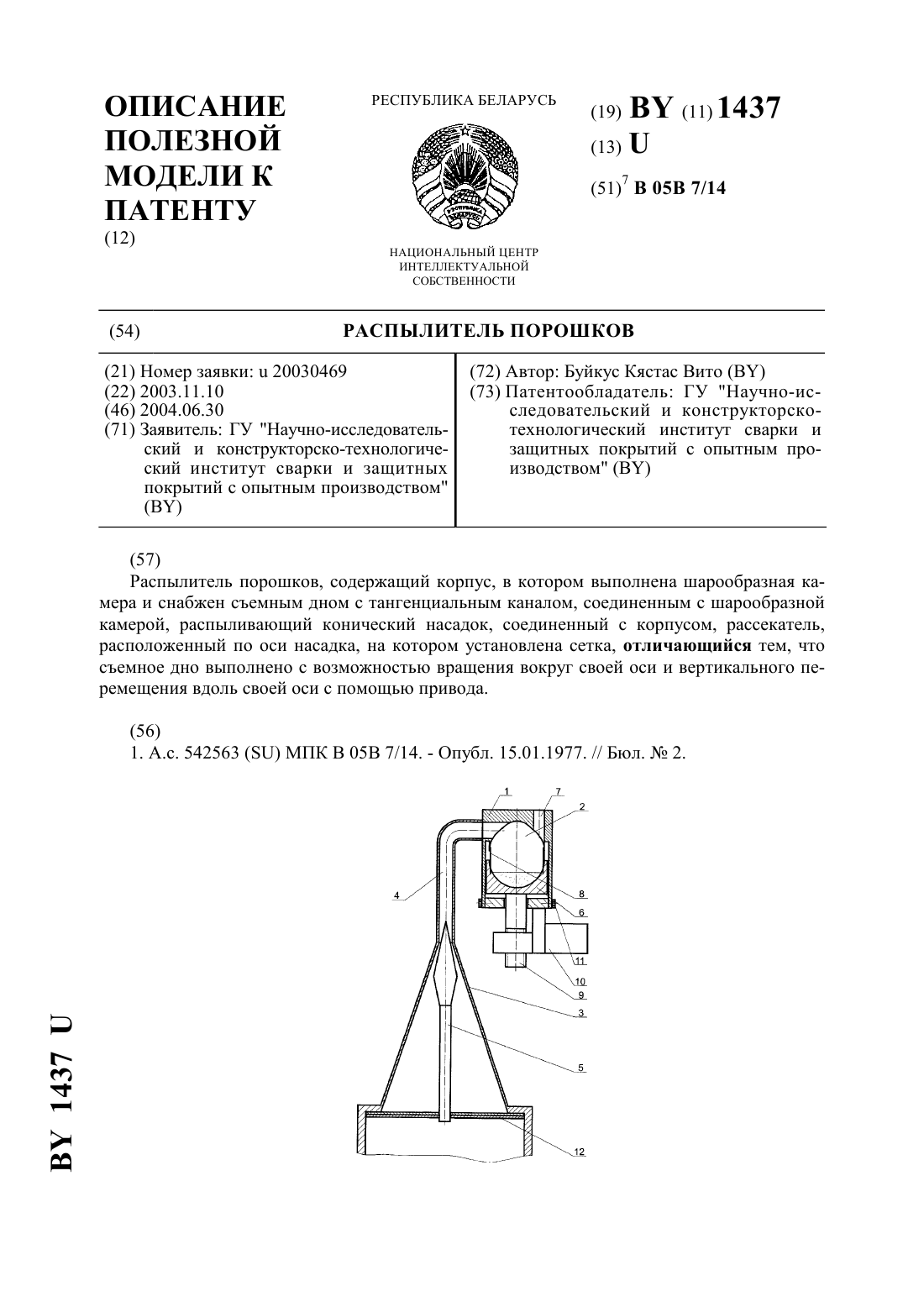
Распылитель порошков
Номер патента: U 1437
Опубликовано: 30.06.2004
Автор: Буйкус Кястас Вито
МПК: B05B 7/14
Метки: порошков, распылитель
Текст:
...по оси насадка, на котором установлена сетка, съемное дно выполнено с возможностью вращения вокруг своей оси и вертикального перемещения вдоль своей оси с помощью привода. На фигуре изображен общий вид распылителя, продольный разрез. Распылитель порошков состоит из корпуса 1, в котором выполнена шарообразная камера 2, распыливающего конического насадка 3, соединенного трубкой 4 с корпусом 1, и рассекателя 5, расположенного по оси...
Предыдущий патент: Устройство для определения параметров колебаний при транспортировке
Следующий патент: Струйный аэратор
Случайный патент: Способ контроля отклонений печатных свойств бумаги от номинальных