Устройство для определения параметров колебаний при транспортировке
Номер патента: U 9261
Опубликовано: 30.06.2013
Авторы: Ярмолович Вячеслав Алексеевич, Анищик Виктор Михайлович
Текст
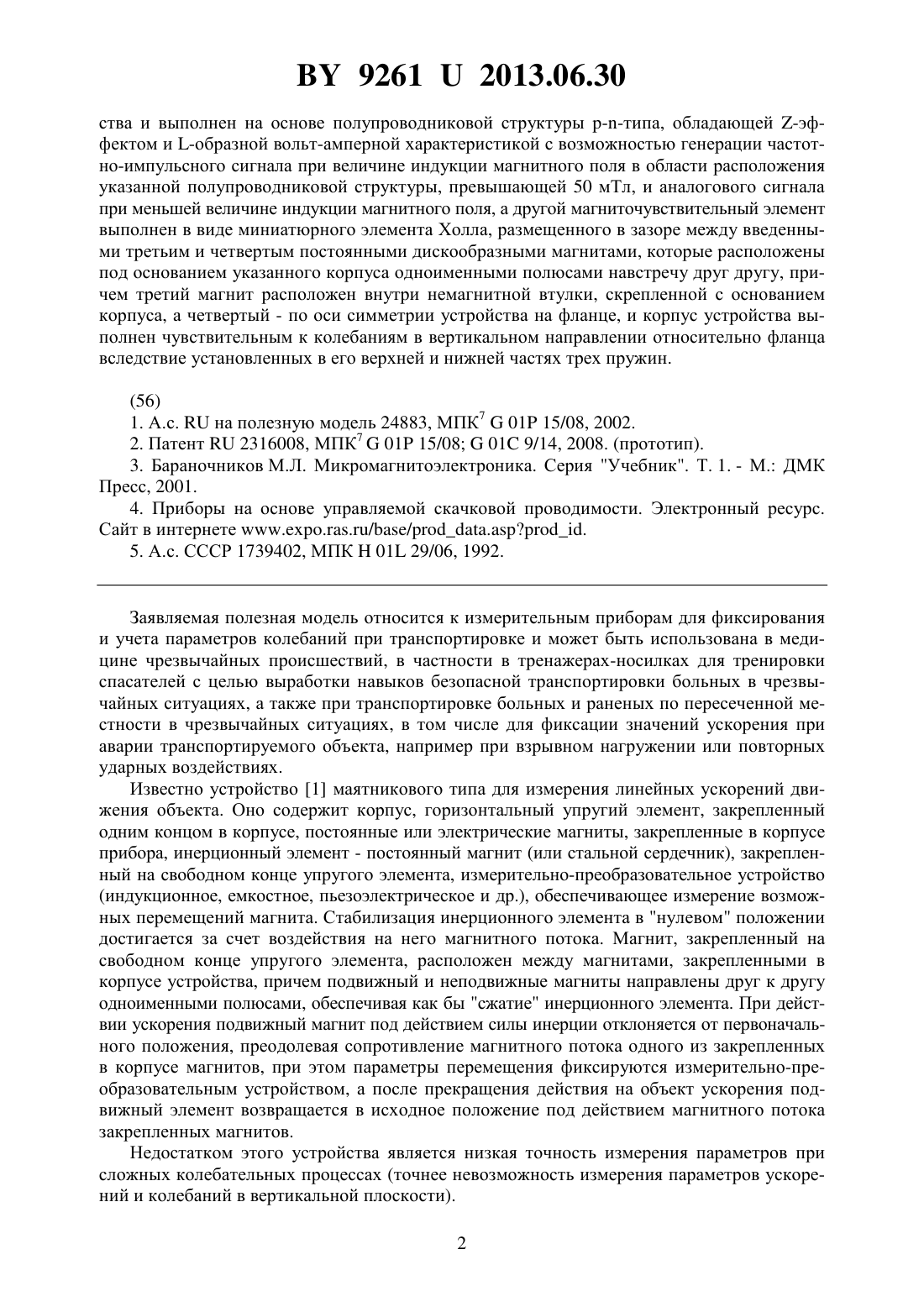
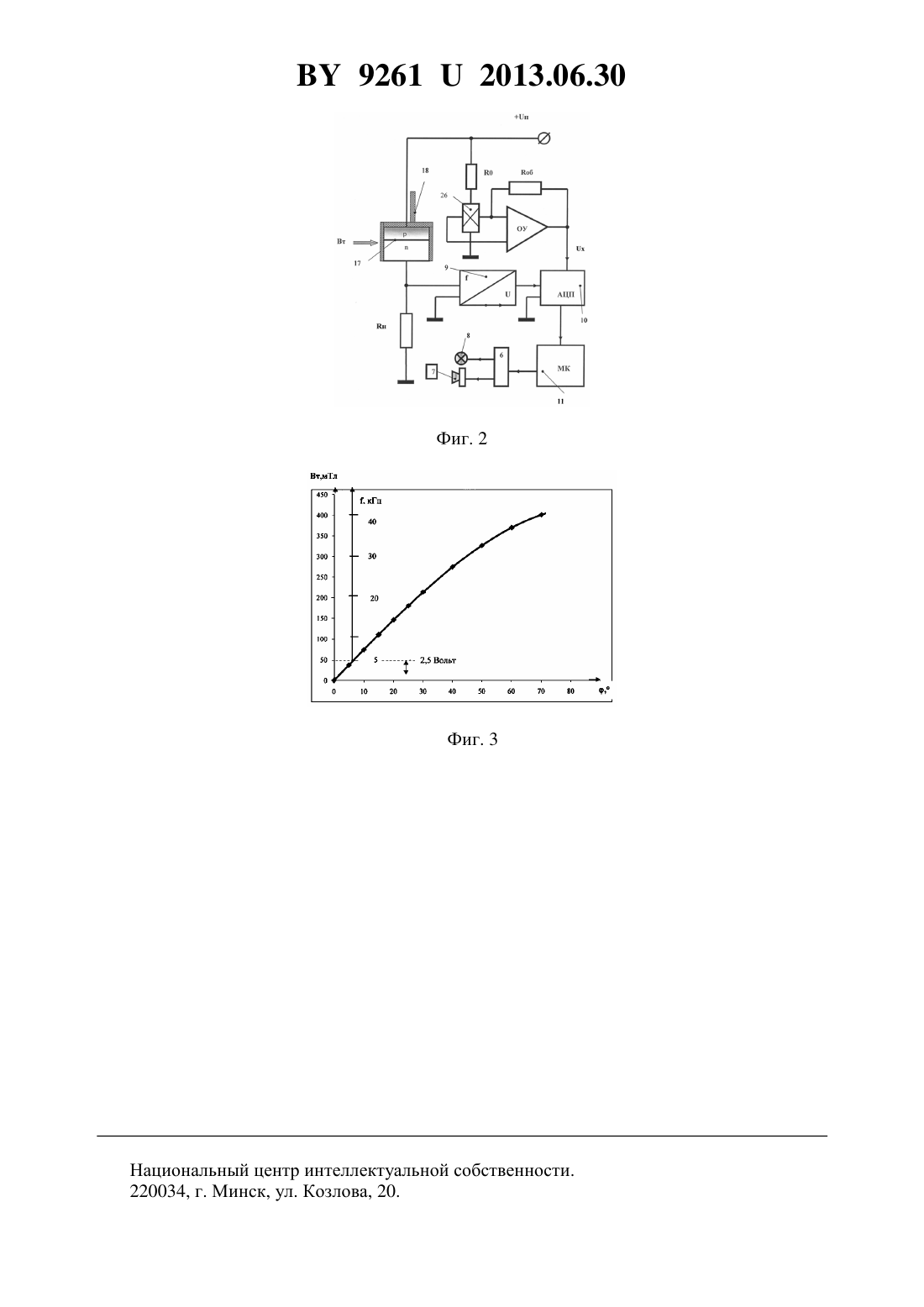
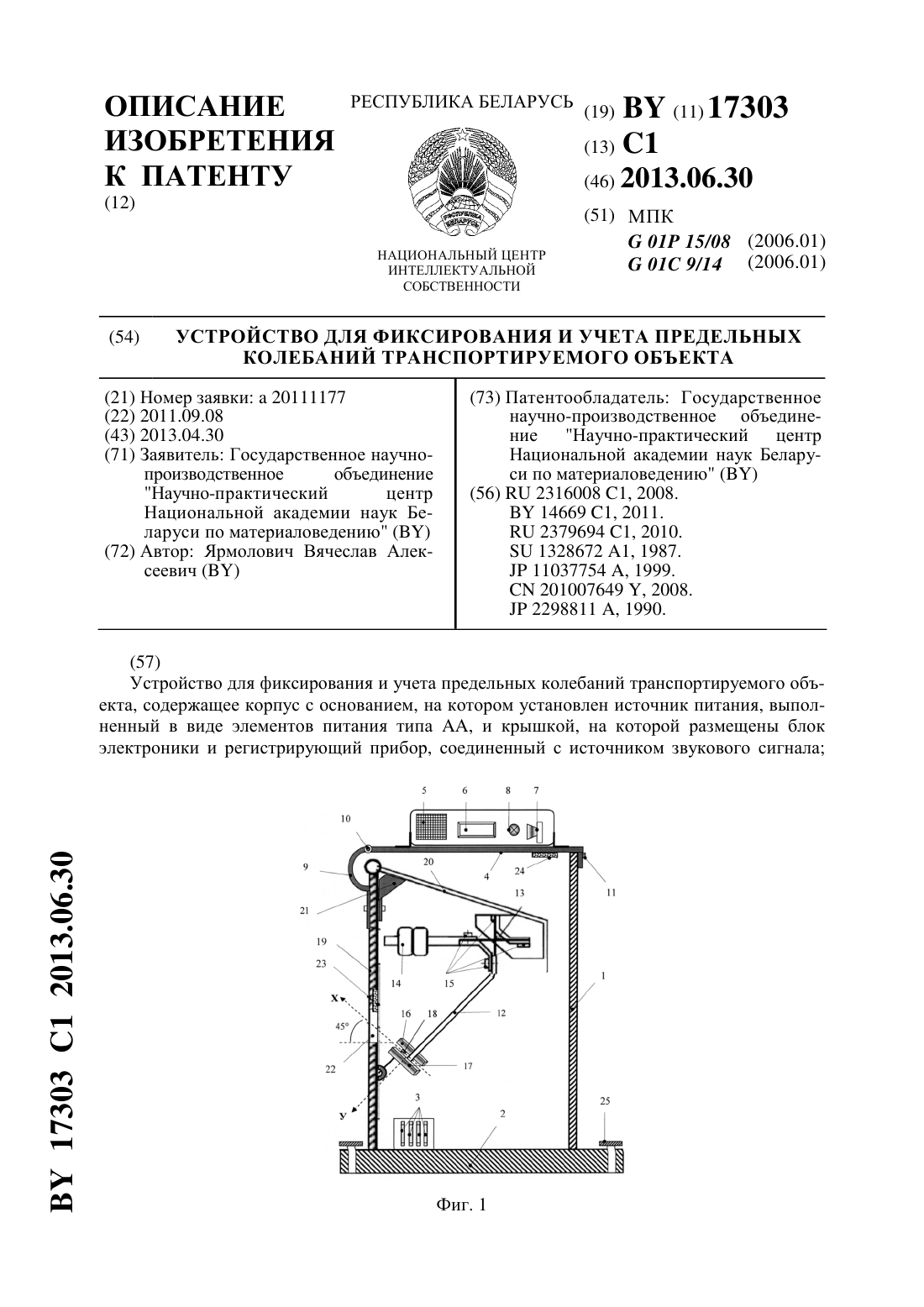
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ПРИ ТРАНСПОРТИРОВКЕ(71) Заявитель Белорусский государственный университет(72) Авторы Анищик Виктор Михайлович Ярмолович Вячеслав Алексеевич(73) Патентообладатель Белорусский государственный университет(57) Устройство для определения параметров колебаний при транспортировке, содержащее немагнитный корпус с основанием, на котором установлен источник питания, выполненный в виде элементов питания типа АА, и крышкой, сверху которой размещены блок электроники и регистрирующий прибор, соединенный с источниками сигнала, например звукового, размещенный в корпусе стержень - инерционное тело маятника малых колебаний, соединенное в нижней его части с первым постоянным магнитом, а второй постоянный магнит, расположенный в корпусе в непосредственной близости от указанного первого магнита, находится с ним в связи по магнитному полю по крайней мере два чувствительных к магнитному полю элемента, отличающееся тем, что в блок электроники введены микропроцессор с аналого-цифровым преобразователем и энергонезависимым блоком памяти и световой источник, подключенный параллельно источнику звукового сигнала, указанное инерционное тело маятника в верхней его части выполнено в виде шара шарового подвеса из магнитного материала с высоким значением удельной магнитной энергии, например изили 5, с намагниченностью, параллельной или антипараллельной вектору силы тяжести, а один из указанных магниточувствительных элементов расположен в непосредственной близости от указанного шара по оси симметрии устрой Фиг. 1 92612013.06.30 ства и выполнен на основе полупроводниковой структуры типа, обладающей -эффектом и -образной вольт-амперной характеристикой с возможностью генерации частотно-импульсного сигнала при величине индукции магнитного поля в области расположения указанной полупроводниковой структуры, превышающей 50 мТл, и аналогового сигнала при меньшей величине индукции магнитного поля, а другой магниточувствительный элемент выполнен в виде миниатюрного элемента Холла, размещенного в зазоре между введенными третьим и четвертым постоянными дискообразными магнитами, которые расположены под основанием указанного корпуса одноименными полюсами навстречу друг другу, причем третий магнит расположен внутри немагнитной втулки, скрепленной с основанием корпуса, а четвертый - по оси симметрии устройства на фланце, и корпус устройства выполнен чувствительным к колебаниям в вертикальном направлении относительно фланца вследствие установленных в его верхней и нижней частях трех пружин.(56) 1. А.с.на полезную модель 24883, МПК 701 15/08, 2002. 2. Патент 2316008, МПК 701 15/0801 9/14, 2008. (прототип). 3. Бараночников М.Л. Микромагнитоэлектроника. Серия Учебник. Т. 1. - М. ДМК Пресс, 2001. 4. Приборы на основе управляемой скачковой проводимости. Электронный ресурс. Сайт в интернете // 5. А.с. СССР 1739402, МПК 01 29/06, 1992. Заявляемая полезная модель относится к измерительным приборам для фиксирования и учета параметров колебаний при транспортировке и может быть использована в медицине чрезвычайных происшествий, в частности в тренажерах-носилках для тренировки спасателей с целью выработки навыков безопасной транспортировки больных в чрезвычайных ситуациях, а также при транспортировке больных и раненых по пересеченной местности в чрезвычайных ситуациях, в том числе для фиксации значений ускорения при аварии транспортируемого объекта, например при взрывном нагружении или повторных ударных воздействиях. Известно устройство 1 маятникового типа для измерения линейных ускорений движения объекта. Оно содержит корпус, горизонтальный упругий элемент, закрепленный одним концом в корпусе, постоянные или электрические магниты, закрепленные в корпусе прибора, инерционный элемент - постоянный магнит (или стальной сердечник), закрепленный на свободном конце упругого элемента, измерительно-преобразовательное устройство(индукционное, емкостное, пьезоэлектрическое и др.), обеспечивающее измерение возможных перемещений магнита. Стабилизация инерционного элемента в нулевом положении достигается за счет воздействия на него магнитного потока. Магнит, закрепленный на свободном конце упругого элемента, расположен между магнитами, закрепленными в корпусе устройства, причем подвижный и неподвижные магниты направлены друг к другу одноименными полюсами, обеспечивая как бы сжатие инерционного элемента. При действии ускорения подвижный магнит под действием силы инерции отклоняется от первоначального положения, преодолевая сопротивление магнитного потока одного из закрепленных в корпусе магнитов, при этом параметры перемещения фиксируются измерительно-преобразовательным устройством, а после прекращения действия на объект ускорения подвижный элемент возвращается в исходное положение под действием магнитного потока закрепленных магнитов. Недостатком этого устройства является низкая точность измерения параметров при сложных колебательных процессах (точнее невозможность измерения параметров ускорений и колебаний в вертикальной плоскости). 2 92612013.06.30 Наиболее близким к заявляемому является устройство маятникового типа, описанное в 2 (прототип). Оно содержит корпус с крышкой и основанием. В корпусе расположен стержень - инерционное тело, выполненное в виде маятника, соединенного с пружиной,закрепленной на крышке. В нижней части стержня расположен магнит. На внутренней поверхности корпуса установлена контактная группа, выполненная в виде равномерно расположенных по периметру корпуса герконов, которые закреплены в точках пересечения поверхности корпуса с траекторией качания маятника. На крышке установлен регистрирующий прибор, выполненный в виде счетчика импульсов и соединенный с герконами контактной группы и источником питания, который установлен на основании и выполнен в виде элементов питания типа АА. В центре основания на пружине закреплен магнит. Основным недостатком прототипа является низкая точность измерений, обусловленная дискретностью измерительных элементов (герконов), установленных равномерно по периметру корпуса, а также устройство практически непригодно для фиксации значений ускорения при аварии транспортируемого объекта, например, при взрывном нагружении или повторных ударных воздействиях. Задачей, решаемой в настоящей полезной модели, является повышение точности измерений параметров колебаний и расширение функциональных возможностей устройства. Для решения поставленной задачи предлагается следующая конструкция устройства. Устройство содержит немагнитный корпус с основанием, на котором установлен источник питания, выполненный в виде элементов питания типа АА, и крышкой, сверху которой размещены блок электроники и регистрирующий прибор, соединенный с источниками сигнала, например звукового, размещенный в корпусе стержень - инерционное тело маятника малых колебаний, соединенное в нижней его части с первым постоянным магнитом,а второй постоянный магнит, расположенный в корпусе в непосредственной близости от указанного первого магнита, находится с ним в связи по магнитному полю по крайней мере два чувствительных к магнитному полю элемента. Оно отличается тем, что в блок электроники введены микропроцессор с аналогоцифровым преобразователем и энергонезависимым блоком памяти и световой источник,подключенный параллельно источнику звукового сигнала, указанное инерционное тело маятника в верхней его части выполнено в виде шара шарового подвеса из магнитного материала с высоким значением удельной магнитной энергии, например изили 5, с намагниченностью, параллельной или антипараллельной вектору силы тяжести,а один из указанных магниточувствительных элементов расположен в непосредственной близости от указанного шара по оси симметрии устройства и выполнен на основе полупроводниковой структуры типа, обладающей -эффектом 3, 4, 5 и -образной вольтамперной характеристикой с возможностью генерации частотно-импульсного сигнала при величине индукции магнитного поля в области расположения указанной полупроводниковой структуры, превышающей 50 мТл, и аналогового сигнала при меньшей величине индукции магнитного поля, а другой магниточувствительный элемент выполнен в виде миниатюрного элемента Холла, размещенного в зазоре между введенными третьим и четвертым постоянными дискообразными магнитами, которые расположены под основанием указанного корпуса одноименными полюсаминавстречу друг другу, причем третий магнит расположен внутри немагнитной втулки, скрепленной с основанием корпуса, а четвертый по оси симметрии устройства на фланце, и корпус устройства выполнен чувствительным к колебаниям в вертикальном направлении относительно фланца вследствие установленных в его верхней и нижней частях трех пружин. По мнению авторов, полезная модель содержит ряд указанных выше новых элементов,позволяющих реализовать решение поставленной задачи. Комплексный анализ изложенных отличительных признаков конструкции устройства показывает, что они являются существенными и находятся в прямой причинно-следственной связи с достигаемым техническим результатом. Из уровня техники не выявлено технических 3 92612013.06.30 решений, отличительные признаки которых обеспечивают решение поставленной задачи в заявляемой полезной модели. Анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявляемого устройства, показал, что оно соответствует критерию новизна по действующему законодательству. Заявляемая полезная модель поясняется фиг. 1-3. На фиг. 1 схематично изображено устройство в разрезе. На фиг. 2 приведена электрическая блок-схема устройства. На фиг. 3 приведена зависимость аналогового выходного сигнала и частотноимпульсного сигнала частотойот величины угла отклоненияот вертикали. (Чувствительности к магнитному полю в аналоговом режиме 50 В/Тл и зависит от напряжения питания, а в частотно импульсном режиме 100 кГц/Тл соответственно). Магнит изс удельной энергией 40 радиусом 10 мм. Полупроводниковая структура расположена на расстоянии 2 мм от поверхности шарового магнита. Устройство для определения параметров колебаний при транспортировке содержит немагнитный корпус 1 с крышкой 2 и основанием 3, на котором установлен источник питания 4, выполненный в виде элементов питания типа АА, а на крышке 2 размещены блок электроники 5 и регистрирующий прибор 6, соединенный с источниками звукового сигнала 7 и светового сигнала 8. В блоке электроники 5 содержится преобразователь 9 частотыв выходное напряжение вых, подключенный к входу аналогово-цифрового преобразователя 10 (АЦП), который, соответственно, подключен к микрокопроцессору, совмещенному с микроконтроллером 11 (МК). В блоке электроники 5 содержатся также усилитель,выполненный на основе ОУ, и другие электронные компоненты, не обозначенные цифрами на представленных фигурах. В корпусе 1 размещен стержень 12 - инерционное тело маятника малых колебаний, соединенное в нижней части с магнитом 13, а второй постоянный магнит 14 расположен в корпусе неподвижно в непосредственной близости от первого 13 и находится с ним в связи по магнитному полю с целью демпфирования колебаний 12 - инерционного тела маятника малых колебаний. Стержень 12 в верхней его части соединен с шаром 15 шарового подвеса маятника, опирающегося на держатель 16,выполненный с центральным отверстием под шар 15. Шар 15 шарового подвеса маятника выполнен магнитным из материала с высоким значением удельной магнитной энергии,например изили 5, с намагниченностью , параллельной или антипараллельной вектору силы тяжести . Магниточувствительный элемент 17 прикреплен с помощью держателя 18 к крышке 2, установлен в непосредственной близости от шара 15 (зазор около 2-4 мм) и выполнен на основе полупроводниковой структуры типа, обладающей-эффектом 3, 4, 5 и -образной вольт-амперной характеристикой с возможностью генерации частотно-импульсного сигнала при величине индукции магнитного поля В в области расположения указанной полупроводниковой структуры, превышающей 50 мТл, и аналогового сигнала при меньшей величине индукции магнитного поля. Магниточувствительная компонента индукции магнитного поля В, воздействующая на элемент 17, должна быть параллельна плоскости раздела областей 17. Перпендикулярная составляющая индукции магнитного поляпрактически не влияет на выходной сигнал с элемента 17. Пружины 19 подпружинены и размещены на цилиндрических выступах крышки 2 между указанной крышкой и -образными держателями 20, привинченными к фланцу 21, хотя крепление с указанным фланцем может быть выполнено и по другому. Цилиндрический фланец 21 выполнен из немагнитного материала с центральным отверстием под втулку 22,соединенную с основанием корпуса 3. Пружина 23 упирается верхним концом в основание корпуса 3, а нижним - в верхнюю часть фланца 21. Постоянные магниты 24 и 25 установлены с зазором во втулке 22 и фланце 21 соответственно и намагничены противоположно. На магните 25 по осирасположен магниточувствительный элемент 26, например элемент Холла, выходной сигнал с которогопоступает на ОУ, а потом на АЦП (блок 10). 4 92612013.06.30 Магниты 24 и 25, установленные с зазором, и магниточувствительный элемент 26 являются основными составляющими датчика перемещений корпуса 1 предлагаемого устройства вдоль оси . Способ формирования - и -областей полупроводниковой структуры магниточувствительного элемента 17 подробно описан в 5. Такие структуры поставляются фирмой, Россия, г. Москва (Институт проблем управления). Полупроводниковая структура, обладающая -эффектом, через тонкопленочной резистор нагрузкиподключен к источнику постоянного питающего напряжения 4 с соблюдением полярности, как представлено на фиг. 2. Плюс источника питания подключен к -области. Когда намагниченностьшара 15 параллельна или антипараллельна вектору силы тяжести , это соответствует нулевому значению выходного сигнала вых, поскольку при вертикальном расположении осизначение индукции магнитного поля 0, а- максимально. Следует отметить, что явление управляемой скачковой проводимости (-эффект) возникает в структурах с -образной вольт-амперной характеристикой и заключается в том,что при определенных значениях питающего напряжения и внешнего магнитного поля проводимость полупроводниковой структуры (в прямом направлении) и, соответственно,амплитуда протекающего через нее тока меняются скачком со временем переходного процесса 1 мкс. Изменение проводимости, подобно структурам с -образной вольт-амперной характеристикой, сопровождается возникновением шнура тока, но с иными физическими свойствами, основным из которых является постоянство плотности тока в шнуре при изменении напряжения на структуре. Основной особенностью полупроводниковой структуры 17 является способность не только воспринимать внешнее магнитное поле, но и производить его преобразование на молекулярном уровне в объеме кристалла без дополнительных электронных схем. Устройство для определения параметров колебаний при транспортировке работает следующим образом. При использовании устройства в чрезвычайных ситуациях, в частности в медицине катастроф, его устанавливают на носилках для транспортировки по пересеченной местности больных и раненых. В этом случае люди, несущие носилки, вынуждены преодолевать различные препятствия, при этом носилки совершают сложные колебания с разнонаправленными и значительными наклонами, что зачастую является опасным для транспортируемого человека. При достижении предельно допустимого отклонения устройство световым и звуковым сигналом оповещает об опасности, а следовательно, и о необходимости изменения способа транспортировки, в том числе изменения скорости, изменения маршрута, перераспределения силовых нагрузок. Для обеспечения щадящего режима транспортировки по пересеченной местности больных и раненых устройство устанавливают в машине скорой помощи. Устройство позволяет фиксировать запредельные уровни движения объекта, например,для фиксации значений ускорения при аварии транспортируемого объекта типа лобовое столкновение, а так же при взрывном нагружении или повторных ударных воздействиях. В таких случаях под действием больших сил инерции шар начинает поворачиваться около своей оси до максимально возможного угла , что и остается зафиксированным в энергонезависимом блоке памяти, и т.д. При использовании устройства для фиксирования и учета предельных амплитуд колебаний при транспортировке в конкурсах-соревнованиях между медицинскими бригадами экстренного реагирования устройство устанавливают на тренажер, выполненный в виде носилок, вес которых соответствует среднестатистическому весу человека. Для выявления победителя учитывают минимальное количество запредельных сигналов, зафиксированных микропроцессором. Технический результат заявляемой полезной модели предусматривает обеспечение безопасной и удобной транспортировки больных и раненых в чрезвычайных ситуациях 5 92612013.06.30 путем исключения опасных колебаний средства транспортировки, а также использование в качестве измерительного прибора в тренажерах для выработки у спасателей навыков безопасной транспортировки. При наклоне корпуса 1 на угол , т.е. когда осьсоставляет с вертикалью (вектором ) угол , колебания маятника демпфируются постоянными магнитами 13 и 14, установленными в корпусе 1. После установления равновесия и малых углах отклонения от вертикали выходной сигнал вых является аналоговым при В 50 мТл и пропорциональным величине В, поскольку магниточувствительный элемент 17 чувствителен к этой компоненте индукции магнитного поля и практически не чувствителен к . По величине вых (или В) определяется искомый уголв соответствие с фиг. 3. При увеличении В 50 мТл (измеряемого угла ) функционирование элемента 17 переходит в режим генерации частотно импульсного сигнала с частотой , пропорциональной В, по величине которой и определяется угол отклонения от вертикали, т.е. искомый угол , который отображается на регистраторе 6 (при чувствительности к магнитному полю 100 кГц/Тл начальная частота составляет 5 кГц). Колебания корпуса в вертикальной плоскости, т.е. по вертикальной оси, демпфируются пружинами 19 и 23 соответственно. Перемещение магнита 24 относительно магнита 25 воспринимается элементом Холла 26, выходной сигнал с которогопоступает на ОУ, а потом на АЦП (блок 10). Выходной сигнал обрабатывается микропроцессором 11 и поступает на регистратор 6, на котором одновременно со значением углавысвечивается и амплитуда колебаний по вертикали. Следовательно, решение поставленной задачи достигается за счет нескольких эффектов. В предложенном датчике вследствие применения магниточувствительной микросхемы с -эффектом генерируется помехозащищенный частотно-импульсный выходной сигнал высокой амплитуды (до 50 от напряжения питания) без применения электронных схем преобразования, а использованная конструкция шарообразного магнита, выполняющего функцию шарового подвеса, позволяет создать сильное магнитное поле, на несколько порядков превышающее уровни электромагнитных помех. Кроме того, точность измерений в первую очередь повышается за счет использования в конструкции системы магнитов и двух магниточувствительных элементов, обеспечивающих аналоговые выходные сигналы либо аналоговый и импульсно-частотный сигналы (а не дискретные сигналы с группы герконов),по которым с помощью микропроцессора рассчитываются основные параметры движения инерционного тела, т.е. амплитуда и ускорение колебаний при транспортировке. В прототипе фиксируются только наличие предельных значений амплитуды колебаний и их число. Следует отметить, что применение шарового подвеса и подвеса корпуса устройства по вертикали позволяет выполнять инерционному телу малые колебания, вызванные воздействием сил, действующих в вертикальном и любом из горизонтальных направлений соответственно. Предложенная конструкция устройства также позволяет значительно расширить его функциональные возможности. Предложенная конструкция позволяет фиксировать запредельные уровни движения объекта, например, для фиксации значений ускорения при аварии транспортируемого объекта типа лобовое столкновение, а также при взрывном нагружении или повторных ударных воздействиях. В таких случаях микропроцессор фиксирует этот факт в энергонезависимом блоке памяти и т.д. Исходя из вышеизложенного, для заявленного устройства в том виде, как оно охарактеризовано в приведенной формуле, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных до даты приоритета средств и методов,поэтому заявляемое устройство соответствует требованию промышленная применимость по действующему законодательству. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 7
МПК / Метки
МПК: G01C 9/14, G01P 15/08
Метки: устройство, транспортировке, определения, колебаний, параметров
Код ссылки
<a href="https://by.patents.su/7-u9261-ustrojjstvo-dlya-opredeleniya-parametrov-kolebanijj-pri-transportirovke.html" rel="bookmark" title="База патентов Беларуси">Устройство для определения параметров колебаний при транспортировке</a>
Устройство бесконтактного измерения параметров вибрации и акустических колебаний
Номер патента: U 8195
Опубликовано: 30.04.2012
Авторы: Зельманский Олег Борисович, Лыньков Леонид Михайлович, Каван Джамал Марсут, Давыдов Геннадий Владимирович
МПК: G01H 9/00
Метки: акустических, вибрации, бесконтактного, устройство, измерения, колебаний, параметров
Текст:
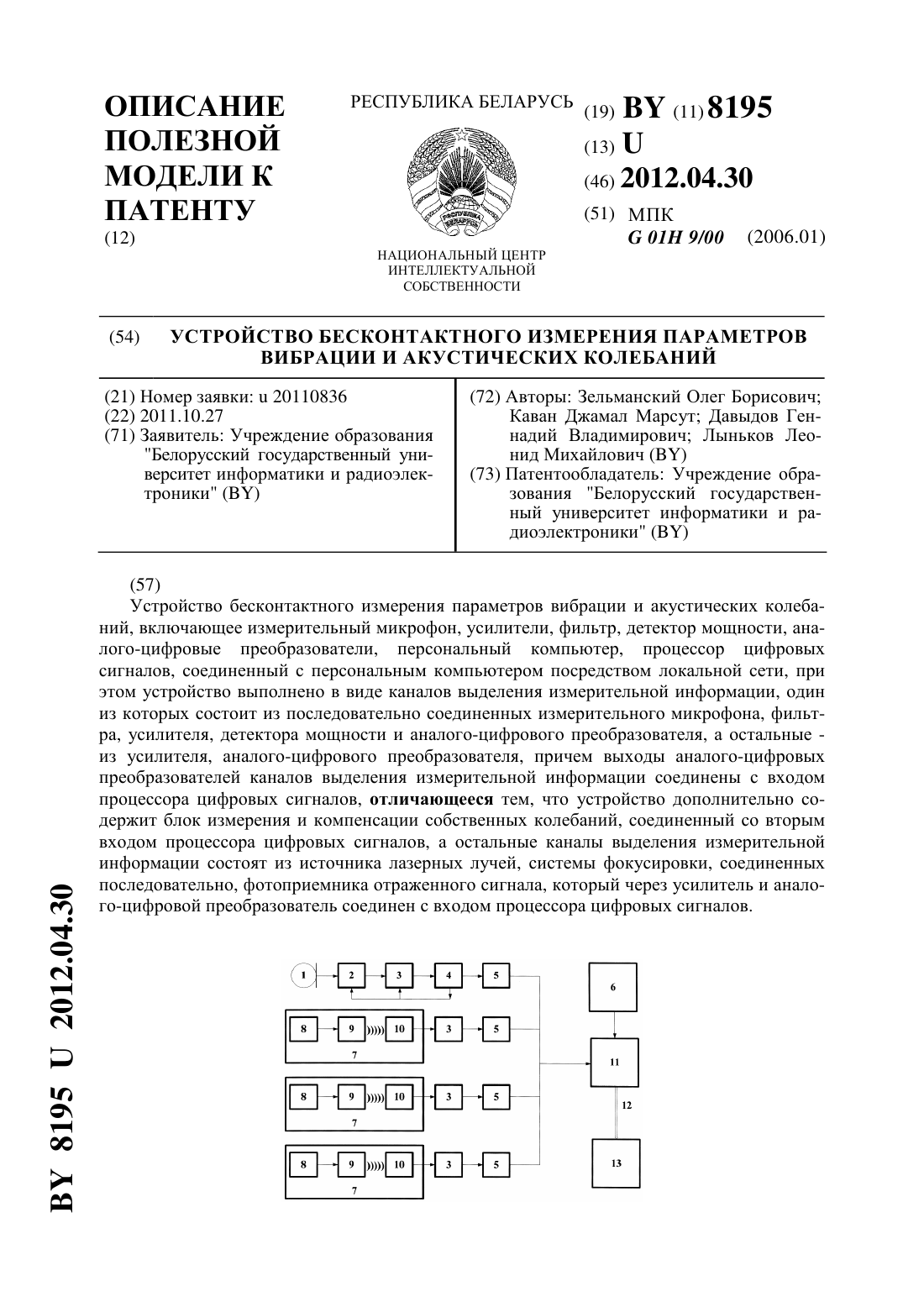
...81952012.04.30 го сигнала, позволяющих производить бесконтактные замеры характеристик вибрации в произвольном направлении в пространстве в режиме реального времени. Задача решается за счет того, что устройство, содержащее измерительный микрофон,усилители, фильтр, детектор мощности, аналого-цифровые преобразователи, персональный компьютер, процессор цифровых сигналов, соединенный с персональным компьютером посредствам локальной сети, выполнено...
Устройство для фиксирования и учета предельных колебаний транспортируемого объекта
Номер патента: 17303
Опубликовано: 30.06.2013
Автор: Ярмолович Вячеслав Алексеевич
МПК: G01C 9/14, G01P 15/08
Метки: колебаний, транспортируемого, учета, фиксирования, объекта, предельных, устройство
Текст:
...при транспортировке. В прототипе фиксируются только наличие предельных значений амплитуды колебаний и их число. Следует отметить, что применение крестообразного пружинного шарнира в качестве упруго элемента и изогнутого стержня позволяет выпол 3 17303 1 2013.06.30 нять инерционному телу малые колебания, вызванные воздействием сил, действующих в вертикальном и горизонтальном направлениях. Предложенная конструкция устройства также позволяет...
Устройство для определения параметров переходного процесса
Номер патента: U 7122
Опубликовано: 30.04.2011
Авторы: Размыслович Геннадий Иванович, Мацкевич Петр Дмитриевич, Брановицкий Иван Иванович
МПК: G01R 23/16
Метки: переходного, параметров, процесса, устройство, определения
Текст:
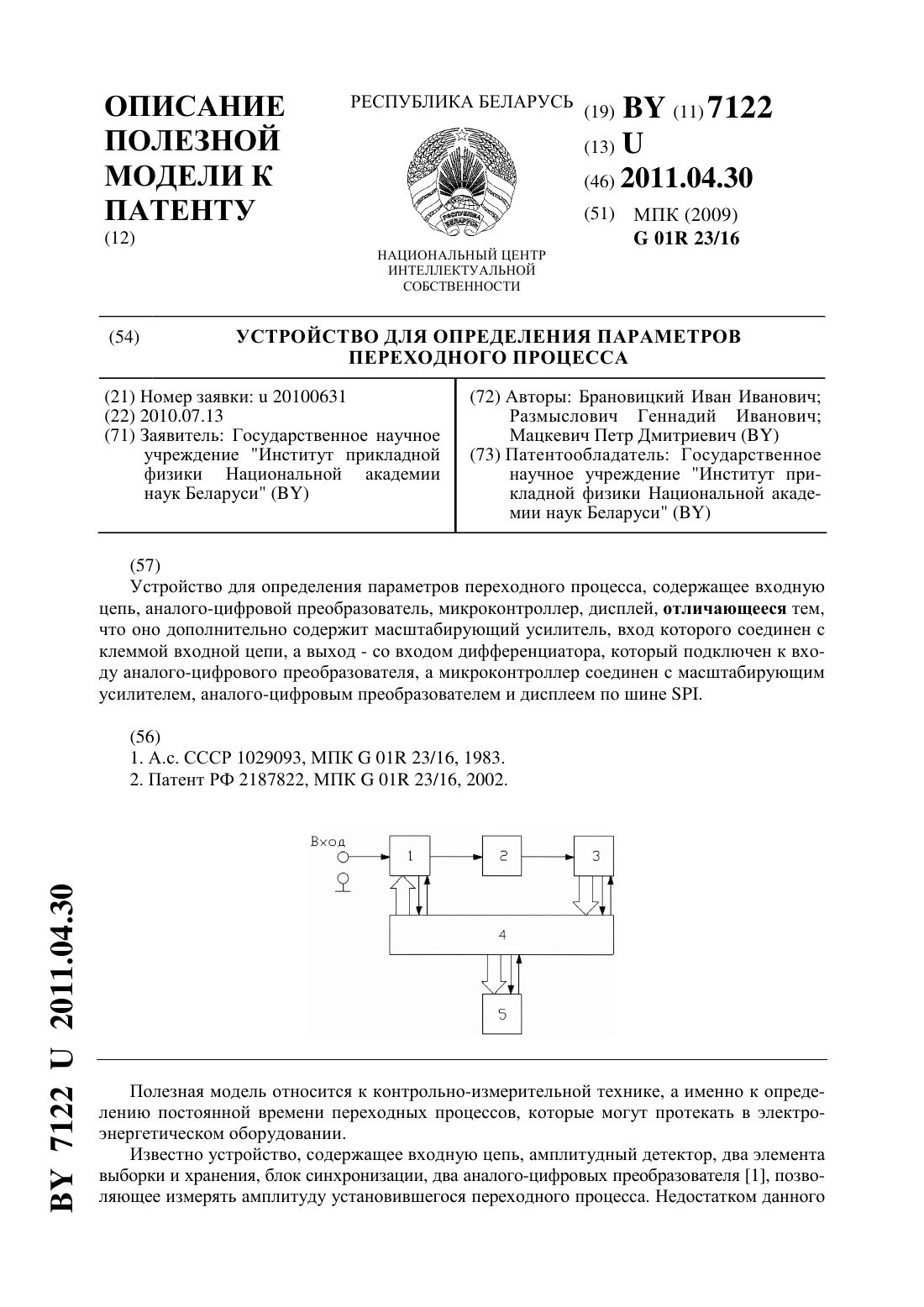
...отсчета времени. Сущность полезной модели заключается в том, что она содержит входную цепь, аналогоцифровой преобразователь (АЦП), микроконтроллер, дисплей и дополнительно масштабирующий усилитель с дифференциатором. Вход масштабирующего усилителя соединен с клеммой входной цепи, а выход - со входом дифференциатора, выход которого далее подключен к АЦП, который подключен к микроконтроллеру и управляется им вместе с масштабирующим...
Установка для определения скорости распространения продольных ультразвуковых колебаний
Номер патента: U 2551
Опубликовано: 28.02.2006
Авторы: Добров Александр Анатольевич, Фёдоров Владислав Викторович, Павловский Александр Александрович
МПК: G01H 5/00, G01N 29/00
Метки: ультразвуковых, скорости, определения, продольных, колебаний, установка, распространения
Текст:
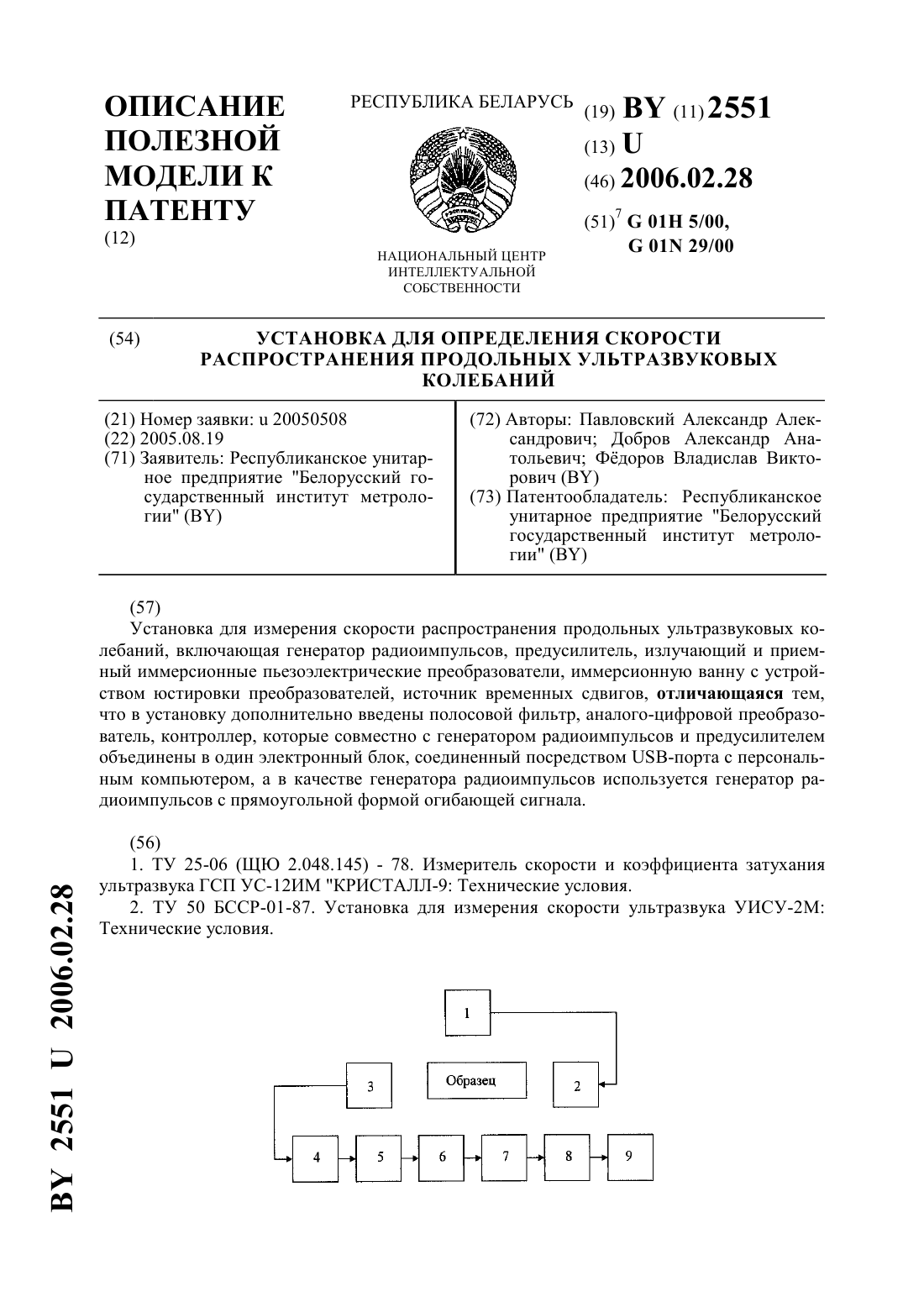
...имеющей повышенную надежность, за счет исключения механических элементов, переходников и кабелей. Задача решается за счет того, что в устройство, содержащее генератор радиоимпульсов, предусилитель, излучающий и приемный иммерсионные пьезоэлектрические преобразователи, иммерсионную ванну с устройством юстировки преобразователей, источник временных сдвигов, включают полосовой фильтр, аналого-цифровой преобразователь,контроллер и персональный...
Устройство для определения параметров высокоскоростного потока частиц
Номер патента: U 5427
Опубликовано: 30.08.2009
Авторы: Лаже Бернард, Смуров Игорь, Чивель Юрий Александрович
МПК: G01N 21/00, G01N 23/00, B22F 7/00...
Метки: параметров, потока, высокоскоростного, устройство, частиц, определения
Текст:
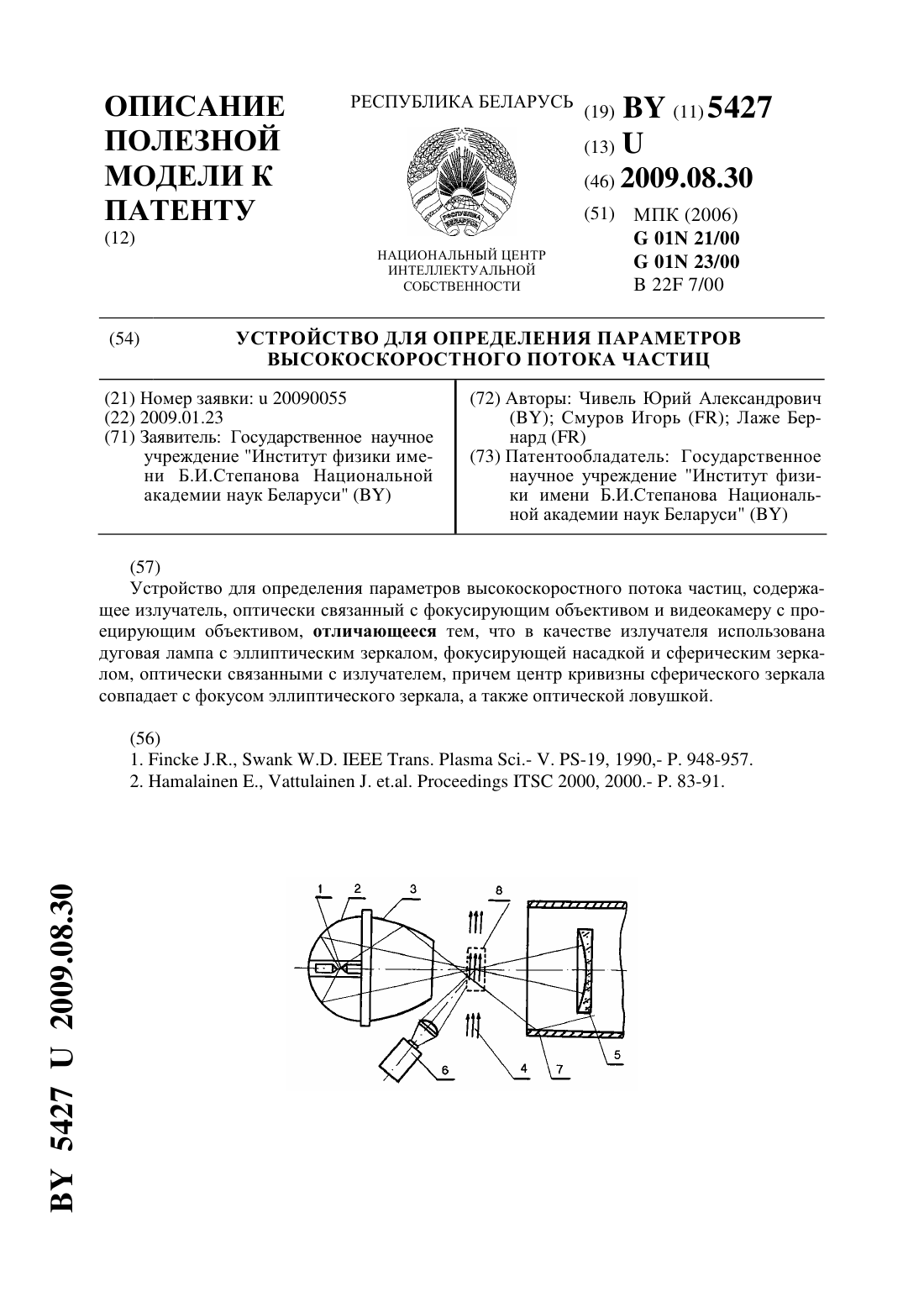
...диагностической аппаратуры. Поставленная техническая задача решается тем, что в устройстве для определения параметров высокоскоростного потока частиц, содержащем излучатель, оптически связанный с фокусирующим объективом, и видеокамеру с проецирующим объективом, в качестве излучателя использована дуговая лампа с эллиптическим зеркалом, фокусирующей насадкой и сферическим зеркалом, оптически связанным с излучателем, причем центр кривизны...
Предыдущий патент: Система обеспыливания технологического оборудования торфобрикетного завода
Следующий патент: Джойстик
Случайный патент: Крепление закладки для книг