Датчик угла наклона
Номер патента: U 7976
Опубликовано: 28.02.2012
Авторы: Анищик Виктор Михайлович, Ярмолович Вячеслав Алексеевич
Текст
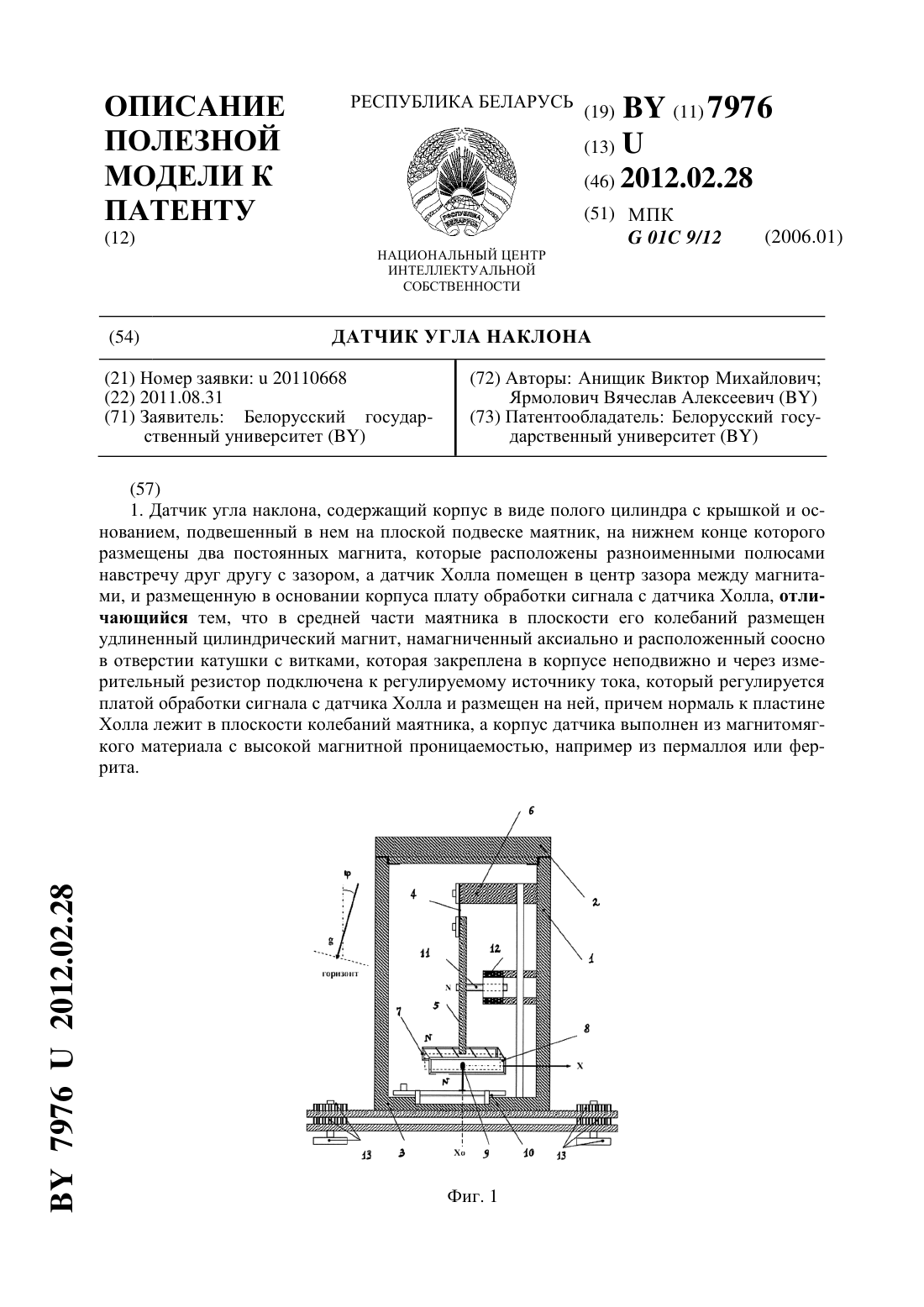
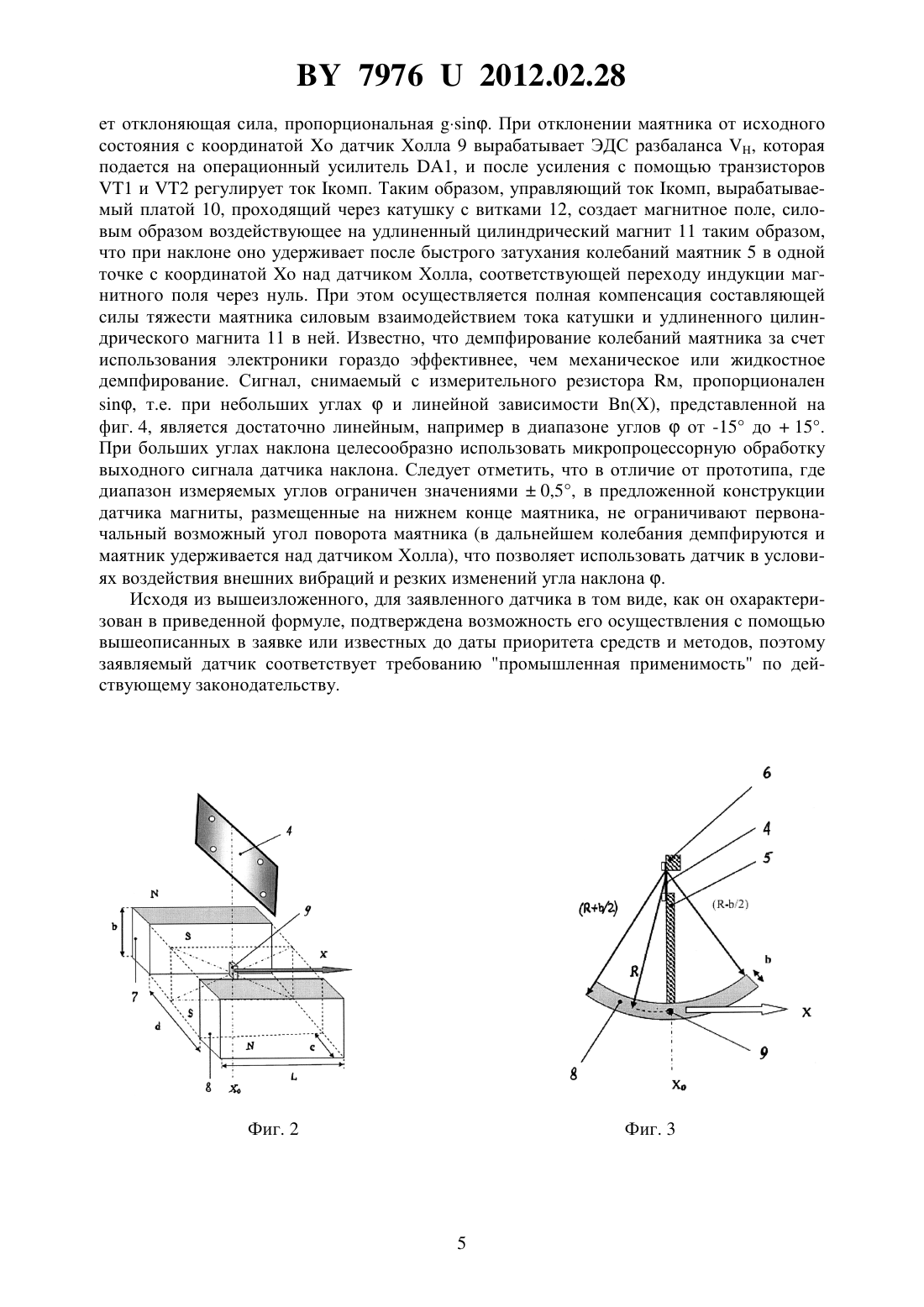
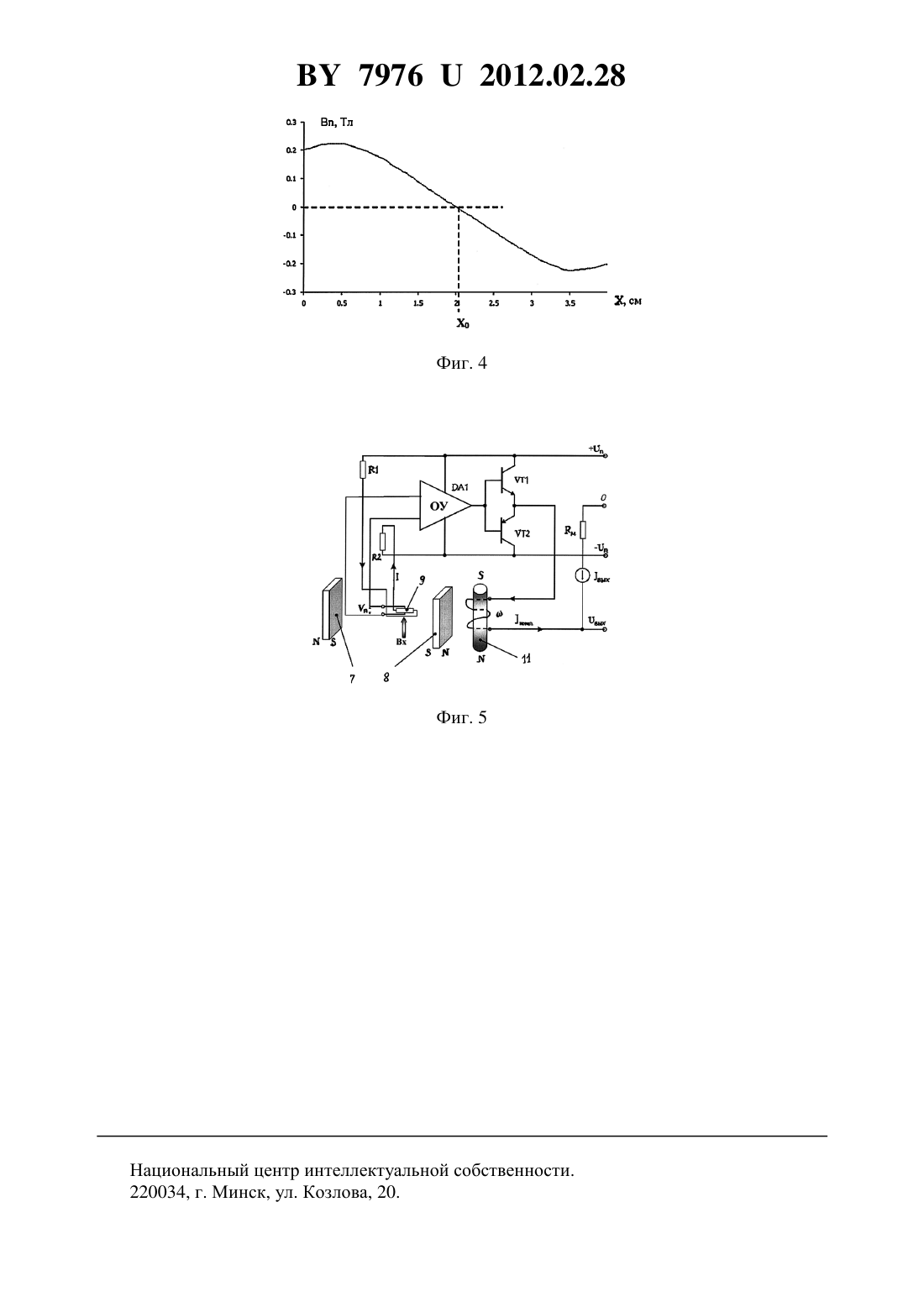
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Белорусский государственный университет(72) Авторы Анищик Виктор Михайлович Ярмолович Вячеслав Алексеевич(73) Патентообладатель Белорусский государственный университет(57) 1. Датчик угла наклона, содержащий корпус в виде полого цилиндра с крышкой и основанием, подвешенный в нем на плоской подвеске маятник, на нижнем конце которого размещены два постоянных магнита, которые расположены разноименными полюсами навстречу друг другу с зазором, а датчик Холла помещен в центр зазора между магнитами, и размещенную в основании корпуса плату обработки сигнала с датчика Холла, отличающийся тем, что в средней части маятника в плоскости его колебаний размещен удлиненный цилиндрический магнит, намагниченный аксиально и расположенный соосно в отверстии катушки с витками, которая закреплена в корпусе неподвижно и через измерительный резистор подключена к регулируемому источнику тока, который регулируется платой обработки сигнала с датчика Холла и размещен на ней, причем нормаль к пластине Холла лежит в плоскости колебаний маятника, а корпус датчика выполнен из магнитомягкого материала с высокой магнитной проницаемостью, например из пермаллоя или феррита. 79762012.02.28 2. Датчик угла наклона по п. 1, отличающийся тем, что два постоянных магнита на нижнем конце маятника выполнены плоскими с одинаковыми радиусами закругления в плоскости колебаний маятника, равными (/2) и (-/2) соответственно, где- расстояние от точки подвеса маятника до датчика Холла, а- высота магнита.(56) 1. Бараночников М.Л. Микромагнитоэлектроника. Т. 1. Принципы функционирования основных изделий микромагнитоэлектроники / Под общей редакцией доктора физикоматематических наук, профессора Мордковича В.Н. - М. ДМК Пресс, 2001. - С. 544 ил.(Серия Учебник 5-94074-078-2) Электронная версия С. 214-215. 2. Свидетельство на полезную модель 15 603 1, МПК 701 9/12. Опубликовано 27.10.2000 Автор(ы)Гладченко В.М. Заявитель и патентообладатель Закрытое акционерное общество Теплоэнергетические технологии (прототип). Заявляемая полезная модель относится к маятниковым электронным датчикам угла наклона, построенным по компенсационному типу и предназначенным для контроля горизонтальности поверхности, в том числе в условиях внешних вибраций. Из уровня техники известен датчик угла наклона 1, конструкция которого состоит из герметичного корпуса, на крышке которого при помощи свободного подвеса укреплен постоянный магнит, выполняющий функцию маятника. Под действием сил притяжения Земли магнит занимает строго вертикальное положение. На основании корпуса расположен датчик Холла. Внутренняя полость корпуса заполнена демпфирующей жидкостью, в качестве которой используется силиконовое масло. При наклоне датчика относительно поверхности Земли происходит поворот постоянного магнита на уголотносительно нормали к пластине Холла, что приводит к изменению величины индукции магнитного поля и, следовательно, к изменению (или появлению) сигнала. Недостатками этого датчика являются низкая точность определения угла наклона,особенно при малых его значениях вследствие незначительного изменения индукции магнитного поля в этой области углов, значительная нелинейность выходной характеристики датчика и ее временная нестабильность из-за большого времени демпфирования колебаний жидкостью, и практически невозможность проведения измерений в условиях внешних вибраций. Наиболее близким к заявляемому является электронный датчик наклона 2 маятникового типа (прототип), который предназначен для контроля горизонтальности поверхностей в пределах малых (менее 0,5 град.) углов наклона. Он содержит герметичный корпус в виде полого цилиндра с крышкой и основанием, подвешенный в нем на плоской подвеске маятник, на нижнем конце которого размещены два постоянных магнита, которые расположены разноименными полюсами навстречу друг другу с зазором, а датчик Холла помещен в зазоре между магнитами. Основание имеет полость, в которой размещена плата со схемой обработки сигнала датчика Холла. С целью ослабления влияния колебаний маятника относительно положения равновесия корпус заполнен демпфирующей жидкостью, например маслом. Основание снабжено установочными опорными винтами для установки начального горизонтального положения. Схема обработки сигнала подключена к регистрирующему прибору, например к аналого-цифровому преобразователю. При изменении наклона контролируемой поверхности магниты смещаются относительно датчика Холла, в результате чего последний вырабатывает сигнал, который обрабатывается схемой и подается на регистрирующий прибор. При малых углах наклона он является линейной функцией угла наклона. 79762012.02.28 Основными недостатками прототипа являются низкая точность определения угла наклона из-за временной нестабильности выходной характеристики датчика вследствие большого времени демпфирования колебаний жидкостью и практически невозможность проведения измерений в условиях внешних вибраций. Кроме того, невозможно контролировать углы наклона, превышающие 0,5 градуса, что обусловлено расположением магнитов конструкции, которые ограничивают перемещение (угол поворота) маятника. Задачей, решаемой в настоящей полезной модели, является повышение точности измерения угла наклона. Для решения поставленной задачи предлагается следующая конструкция датчика угла наклона. Датчик угла наклона содержит корпус в виде полого цилиндра с крышкой и основанием,подвешенный в нем на плоской подвеске маятник, на нижнем конце которого размещены два постоянных магнита, которые расположены разноименными полюсами навстречу друг другу с зазором, а датчик Холла помещен в центр зазора между магнитами, и размещенную в основании корпуса плату обработки сигнала с датчика Холла. Он отличается тем, что в средней части маятника в плоскости его колебаний размещен удлиненный цилиндрический магнит, намагниченный аксиально и расположенный соосно в отверстии катушки с витками, которая закреплена в корпусе неподвижно и через измерительный резистор подключена к регулируемому источнику тока, который регулируется платой обработки сигнала с датчика Холла и размещен на ней, причем нормаль к пластине Холла лежит в плоскости колебаний маятника, а корпус датчика выполнен из магнитомягкого материала с высокой магнитной проницаемостью, например из пермаллоя или феррита. Также датчик наклона отличается тем, что два постоянных магнита на нижнем конце маятника выполнены плоскими с одинаковыми радиусами закругления в плоскости колебаний маятника, равными (/2) и (-/2) соответственно, где- расстояние от точки подвеса маятника до датчика Холла, а- высота магнита. Такая конструкция более предпочтительна при измерении больших углов наклона, величина которых может быстро изменяться. При любых начальных колебаниях маятника датчик Холла всегда находится в зазоре по линии среднего радиуса изгиба магнитов, что расширяет область линейности выходной характеристики датчика. По мнению авторов, полезная модель содержит ряд новых элементов, позволяющих реализовать значительное повышение точности измерения угла наклона. Анализ предлагаемого решения и известных показывает, что конструкция датчика позволяет осуществить компенсационный принцип измерения угла наклона, что и позволяет повысить точность измерений. А именно выводы катушки через измерительный резистор подключены к регулируемому источнику тока, который регулируется платой обработки сигнала с датчика Холла, и поэтому ток, проходящий через катушку, создает магнитное поле, силовым образом воздействующее на удлиненный цилиндрический магнит таким образом, что при наклоне оно удерживает маятник в одной точке, соответствующей переходу индукции магнитного поля через нуль. При этом осуществляется компенсация составляющей силы тяжести маятника силовым взаимодействием тока катушки и удлиненного цилиндрического магнита в ней. Сигнал снимается с измерительного резистора. При этом демпфирование колебаний маятника за счет использования электроники является активным видом демпфирования и оно более предпочтительно, чем механическое или жидкостное демпфирование, что в итоге позволяет использовать датчик при наложении внешних вибраций. Кроме того, в отличие от прототипа и известных аналогов предлагаемая конструкция датчика угла наклона обладает повышенной помехозащищенностью от внешних магнитных и электромагнитных полей из-за выполнения корпуса датчика из магнитомягкого материала с высокой магнитной проницаемостью, например из пермаллоя или феррита, что также значительно увеличивает точность измерений. Комплексный анализ изложенных отличительных признаков конструкции датчика показывает, что они являются существенными и находятся в прямой причинно-следственной 3 79762012.02.28 связи с достигаемым техническим результатом. Из уровня техники не выявлено технических решений, отличительные признаки которых обеспечивают решение поставленной задачи в заявляемой полезной модели. Анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявляемого датчика, показал, что заявляемый датчик соответствует критерию новизна по действующему законодательству. Заявляемая полезная модель поясняется чертежами. На фиг. 1 представлено изображение датчика наклона в разрезе вдоль оси симметрии корпуса. На фиг. 2 представлена схема расположения магнитов и датчика Холла в их зазоре. На фиг. 3 представлен вариант конструктивного исполнения магнитов, размещенных на нижнем конце маятника закругленными, когда каждый магнит имеет радиусы закругления в плоскости колебаний маятника (/2) и (-/2) соответственно, где- расстояние от точки подвеса маятника до датчика Холла, а- высота магнита. На фиг. 4 изображено распределение нормальной составляющей индукции магнитного поляот двух постоянных магнитов, размещенных на нижнем конце маятника вдоль оси колебанийпри зазоре между магнитами 20 мм. Размеры магнитов 10 мм,30 мм. Магниты - из сплава с удельной энергией 30 . Координататочка перехода индукции магнитного поля через нулевое значение, т.е.0. Рабочая область колебаний маятника находится вблизи точкии не выходит за область линейности функции . Нормаль к пластине Холла лежит в плоскости колебаний маятника. На фиг. 5 приведена электронная функциональная схема датчика угла наклона. При этом ЭДС, снимаемая с датчика Холла , подается на операционный усилитель 1, выход которого подключен к регулируемому источнику тока (усилителю мощности на транзисторах 1 и 2). Датчик угла содержит корпус 1 в виде полого цилиндра с крышкой 2 и основанием 3,подвешенный в нем на плоской подвеске 4 (лента из бериллевой бронзы толщиной не более 0,1 мм) маятник 5 на -образной планке 6, на нижнем конце маятника 4 размещены двапостоянных магнита 7 и 8, которые расположены с зазороми одинаковыми полюсами ориентированы навстречу друг другу. Датчик Холла 9 размещен между магнитами 7 и 8 в центре зазора, причем нормаль к пластине Холла лежит в плоскости колебаний маятника. Датчик Холла 9 закреплен неподвижно на электронной плате обработки сигнала 10,установленной на основании корпуса 3. В средней части маятника 5 в плоскости его колебаний размещен удлиненный цилиндрический магнит 11, намагниченный аксиально и расположенный соосно в отверстии катушки 12 с витками (число витковнаходится в диапазоне 1000-2500), которая закреплена в корпусе 1 неподвижно и через измерительный резистор м подключена к регулируемому источнику тока (усилителю мощности на транзисторах 1 и 2) в соответствии с электронной функциональной схемой датчика угла наклона, изображенной на фиг. 5, который регулируется платой обработки сигнала с датчика Холла 9 при помощи операционного усилителя ОУ. Корпус 1 выполнен из магнитомягкого материала с высокой магнитной проницаемостью, например из пермаллоя или феррита. Основание 3 снабжено установочными опорными винтами 14 для установки начального горизонтального положения. Датчик угла наклона работает следующим образом. Вначале установочными опорными винтами 14 устанавливается начальное горизонтальное положение, при этом выходной сигнал , снимаемый с измерительного резистора м, соответствует величине, установленной при калибровке датчика на горизонтальном стенде, и без ограничения общности можно считать вых 0, а маятник расположен вертикально над датчиком Холла 9 в точке с координатой . При наклоне датчика на угол , т.е. когда вектор силы тяжестисоставляет с вертикалью (осью цилиндрического корпуса) угол , на маятник воздейству 4 79762012.02.28 ет отклоняющая сила, пропорциональная . При отклонении маятника от исходного состояния с координатойдатчик Холла 9 вырабатывает ЭДС разбаланса , которая подается на операционный усилитель 1, и после усиления с помощью транзисторов 1 и 2 регулирует ток комп. Таким образом, управляющий ток комп, вырабатываемый платой 10, проходящий через катушку с витками 12, создает магнитное поле, силовым образом воздействующее на удлиненный цилиндрический магнит 11 таким образом,что при наклоне оно удерживает после быстрого затухания колебаний маятник 5 в одной точке с координатойнад датчиком Холла, соответствующей переходу индукции магнитного поля через нуль. При этом осуществляется полная компенсация составляющей силы тяжести маятника силовым взаимодействием тока катушки и удлиненного цилиндрического магнита 11 в ней. Известно, что демпфирование колебаний маятника за счет использования электроники гораздо эффективнее, чем механическое или жидкостное демпфирование. Сигнал, снимаемый с измерительного резистора м, пропорционален, т.е. при небольших углахи линейной зависимости , представленной на фиг. 4, является достаточно линейным, например в диапазоне угловот -15 до 15. При больших углах наклона целесообразно использовать микропроцессорную обработку выходного сигнала датчика наклона. Следует отметить, что в отличие от прототипа, где диапазон измеряемых углов ограничен значениями 0,5, в предложенной конструкции датчика магниты, размещенные на нижнем конце маятника, не ограничивают первоначальный возможный угол поворота маятника (в дальнейшем колебания демпфируются и маятник удерживается над датчиком Холла), что позволяет использовать датчик в условиях воздействия внешних вибраций и резких изменений угла наклона . Исходя из вышеизложенного, для заявленного датчика в том виде, как он охарактеризован в приведенной формуле, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных до даты приоритета средств и методов, поэтому заявляемый датчик соответствует требованию промышленная применимость по действующему законодательству. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 6
МПК / Метки
МПК: G01C 9/12
Код ссылки
<a href="https://by.patents.su/6-u7976-datchik-ugla-naklona.html" rel="bookmark" title="База патентов Беларуси">Датчик угла наклона</a>
Устройство для определения продольного угла наклона пути, проходимого транспортным средством
Номер патента: U 350
Опубликовано: 30.09.2001
Авторы: Поддубко Сергей Николаевич, Кедич Денис Георгиевич, Басалаев Владимир Николаевич, Зенько Игорь Леонидович
МПК: G01C 7/04
Метки: пути, определения, продольного, наклона, транспортным, проходимого, угла, устройство, средством
Текст:
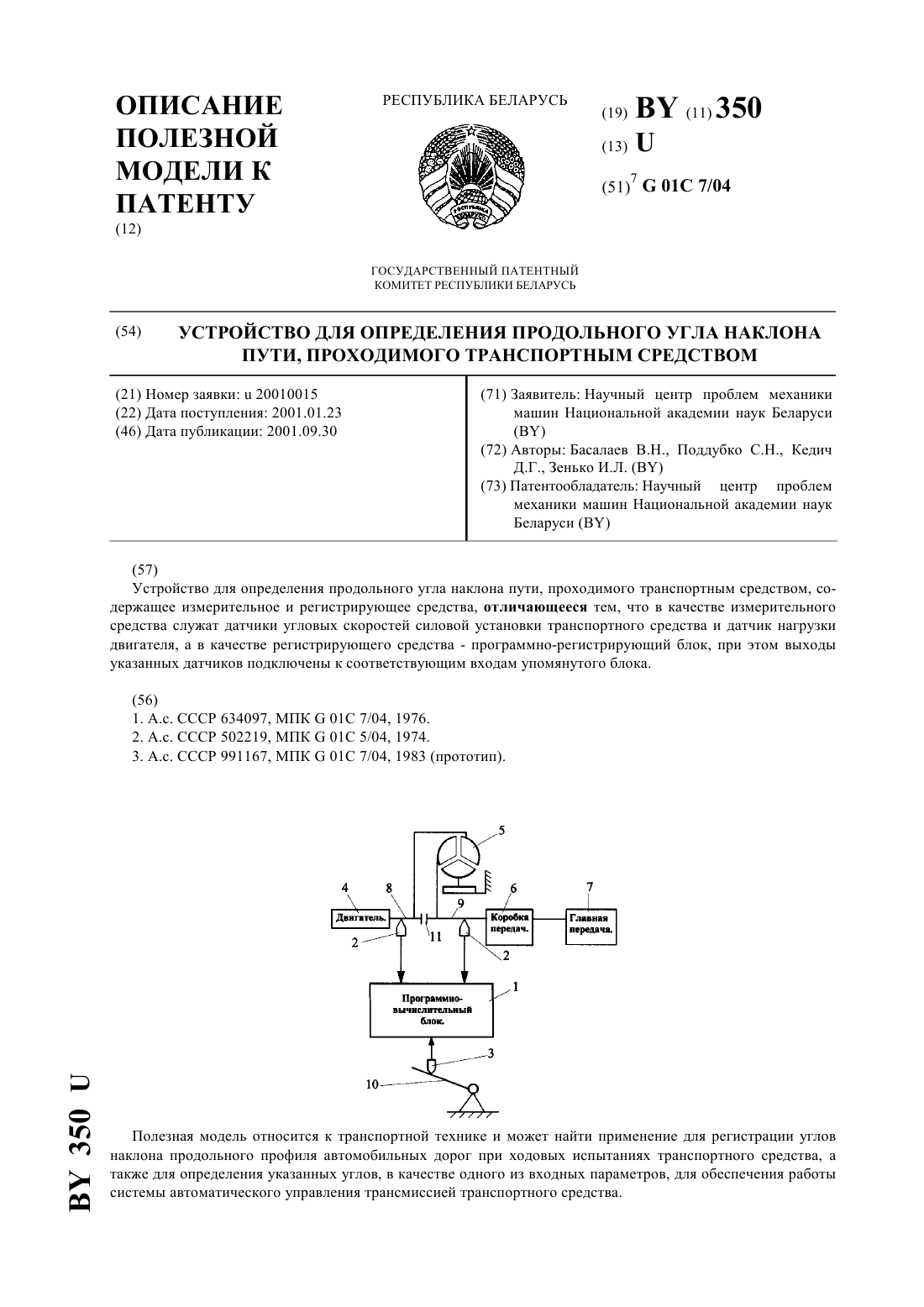
...работы системы автоматического управления трансмиссией. Задачей настоящего технического решения является повышение точности определения продольного угла наклона пути, проходимого транспортным средством, за счет исключения влияния режима и условий его движения на работу устройства. Поставленная задача решается в устройстве для определения продольного угла наклона пути, проходимого транспортным средством, содержащем измерительные и...
Датчик угла поворота рулевого колеса автомобиля
Номер патента: U 5310
Опубликовано: 30.06.2009
Авторы: Ярмолович Вячеслав Алексеевич, Анищик Виктор Михайлович
МПК: G01B 7/30
Метки: угла, колеса, поворота, рулевого, автомобиля, датчик
Текст:
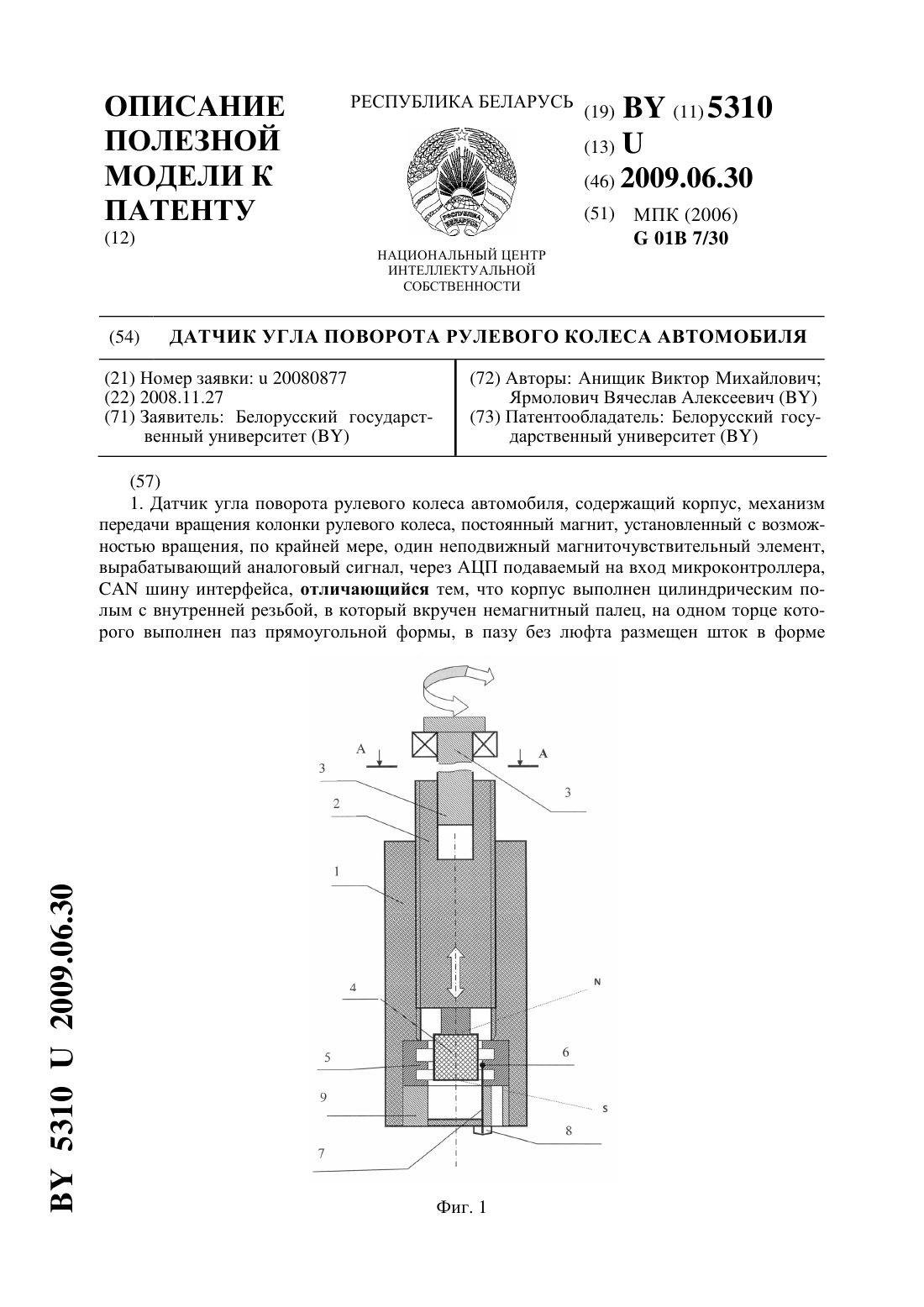
...полезной модели, является повышение надежности датчика за счет упрощения механической конструкции и уменьшения количества магниточувствительных элементов. При этом надежно определяется абсолютное угловое положение рулевого колеса в диапазоне углов не менее 1080, непосредственно после включения зажигания даже в отсутствие перемещений руля и после кратковременных прерываний напряжения питания. Решение поставленной задачи достигается тем, что...
Датчик давления
Номер патента: 4468
Опубликовано: 30.06.2002
Автор: Довгяло Дмитрий Александрович
МПК: G01L 9/14
Текст:
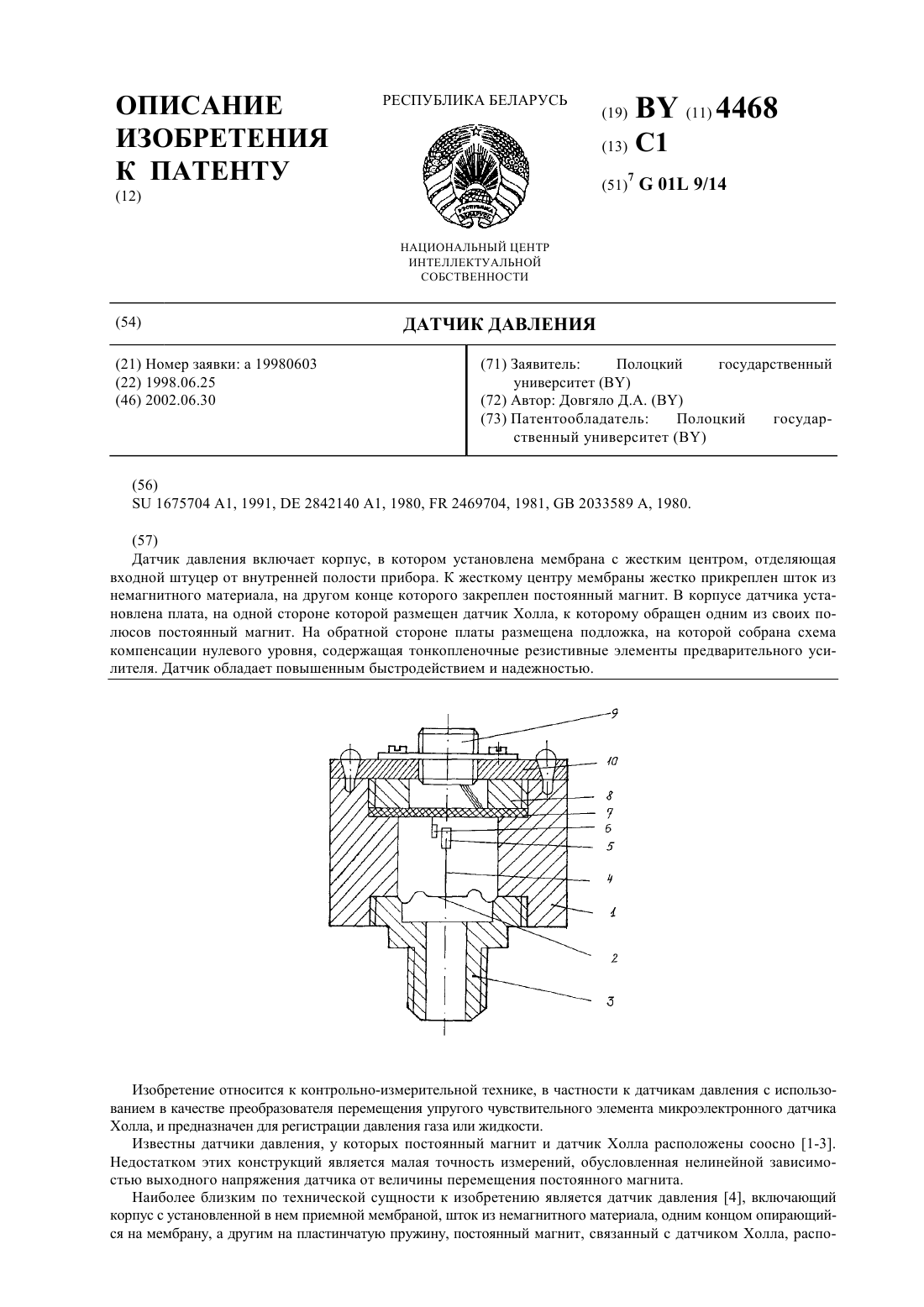
...и установленную в корпусе плату, на которой размещен датчик Холла, к которому обращен одним из своих полюсов постоянный магнит, в отличие от прототипа мембрана выполнена с жестким центром, к которому жестко прикреплен один конец штока, а на другом конце штока жестко закреплен постоянный магнит. Кроме того, в датчик введена схема компенсации нулевого уровня, состоящая из тонкопленочных резистивных элементов предварительного усилителя,...
Датчик давления
Номер патента: U 230
Опубликовано: 30.03.2001
Авторы: Довгяло Дмитрий Александрович, Рымарев Виталий Анатольевич, Бурдин Сергей Максимович
МПК: G01L 9/14
Текст:
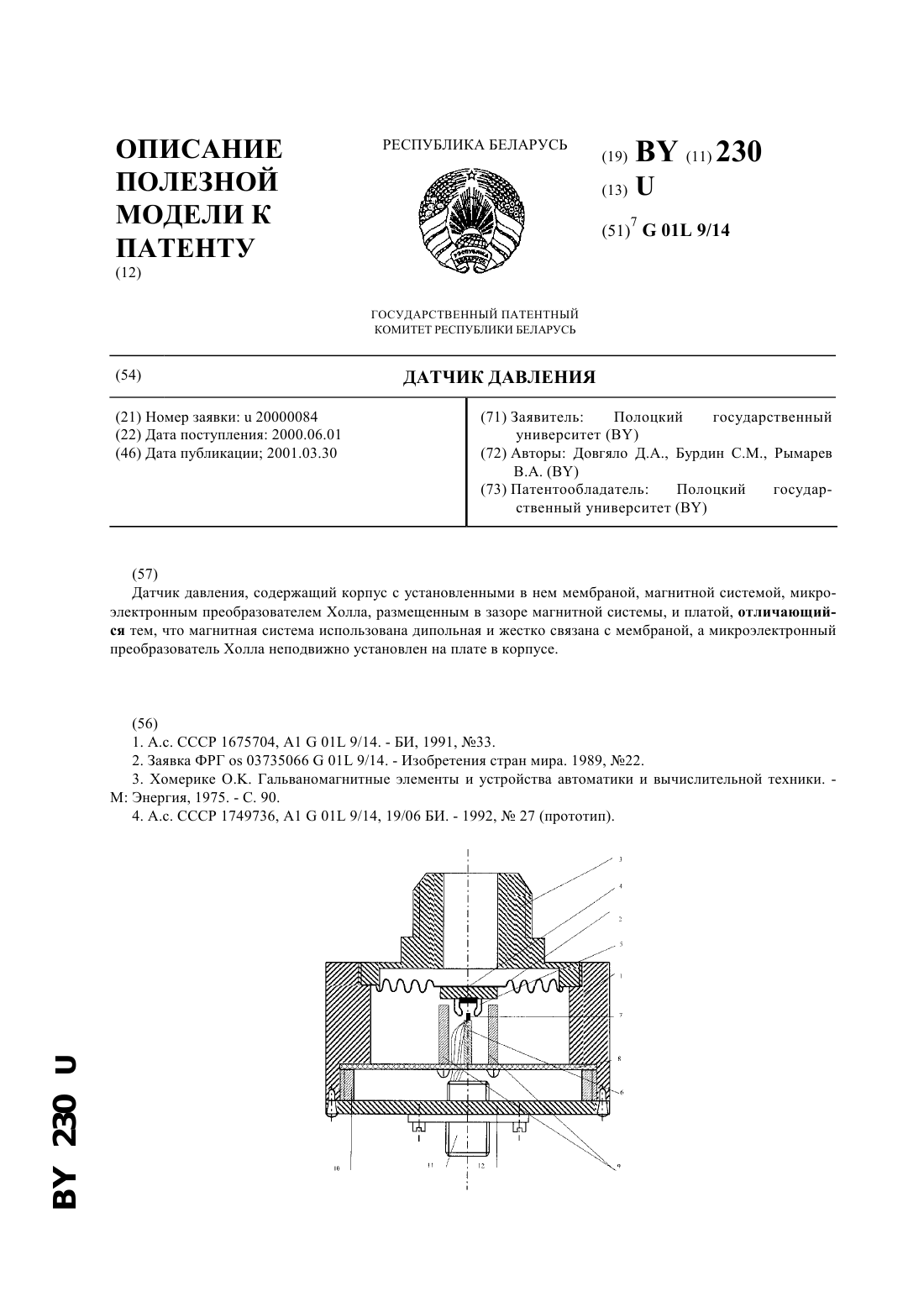
...кольцо, расположенное снаружи разделительной трубки и закрепленное в упругом центрирующем подвесе, с которым связан электрический измерительный преобразователь, выполненный в виде двух датчиков Холла, размещенных в зазоре магнита. В данной конструкции возникают погрешности,связанные с наличием передаточных элементов, что значительно увеличивает погрешность измерений. Кроме того, в конструкции применяется два постоянных магнита....
Датчик положения якоря линейного шагового двигателя
Номер патента: 2427
Опубликовано: 30.09.1998
Автор: Трусов Николай Калистратович
МПК: H02K 29/08, G01R 33/07
Метки: положения, двигателя, датчик, линейного, шагового, якоря
Текст:
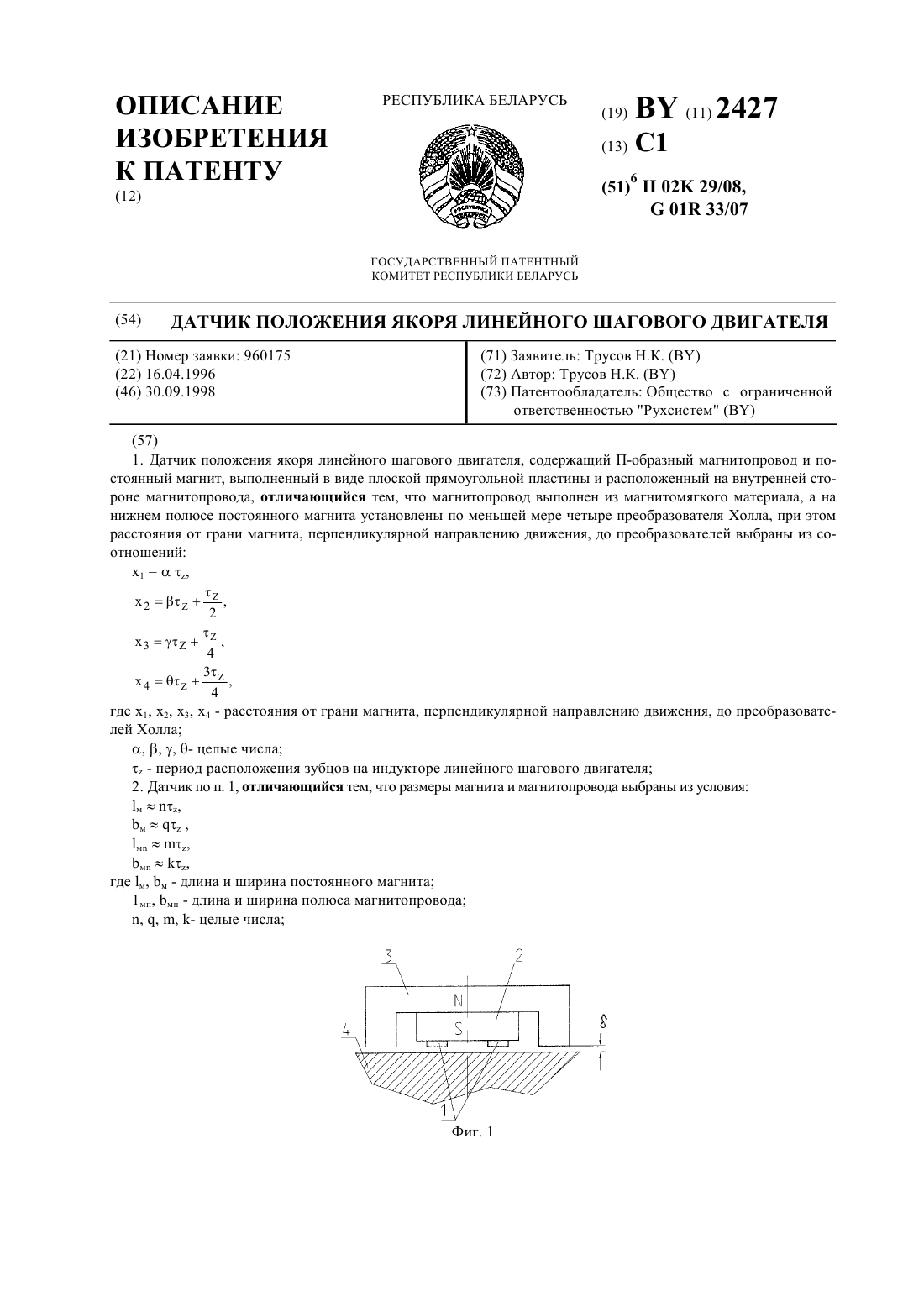
...1, 2, 3, 4 - расстояние от грани магнита, перпендикулярной направлению движения, до преобразователей Холла, , , - целые числа- период расположения зубцов на индукторе линейного шагового двигателя. Геометрические размеры магнита и магнитопровода выбраны из условий, что м,мп,мп. Здесь м, м - длина и ширина постоянного магнита мп , мп - длина и ширина полюса магнитопровода, , ,- целые числа. Кроме того, постоянный магнит выполнен из...
Предыдущий патент: Детекторный диод с балочными выводами
Следующий патент: Барабанная лебедка
Случайный патент: Подложка нейтрализатора отработавших газов двигателя внутреннего сгорания