Устройство управления набором материала фронтального погрузчика
Номер патента: 7004
Опубликовано: 30.06.2005
Авторы: Коломиец Михаил Антонович, Чудук Сергей Александрович, Рожанский Альберт Анатольевич
Текст
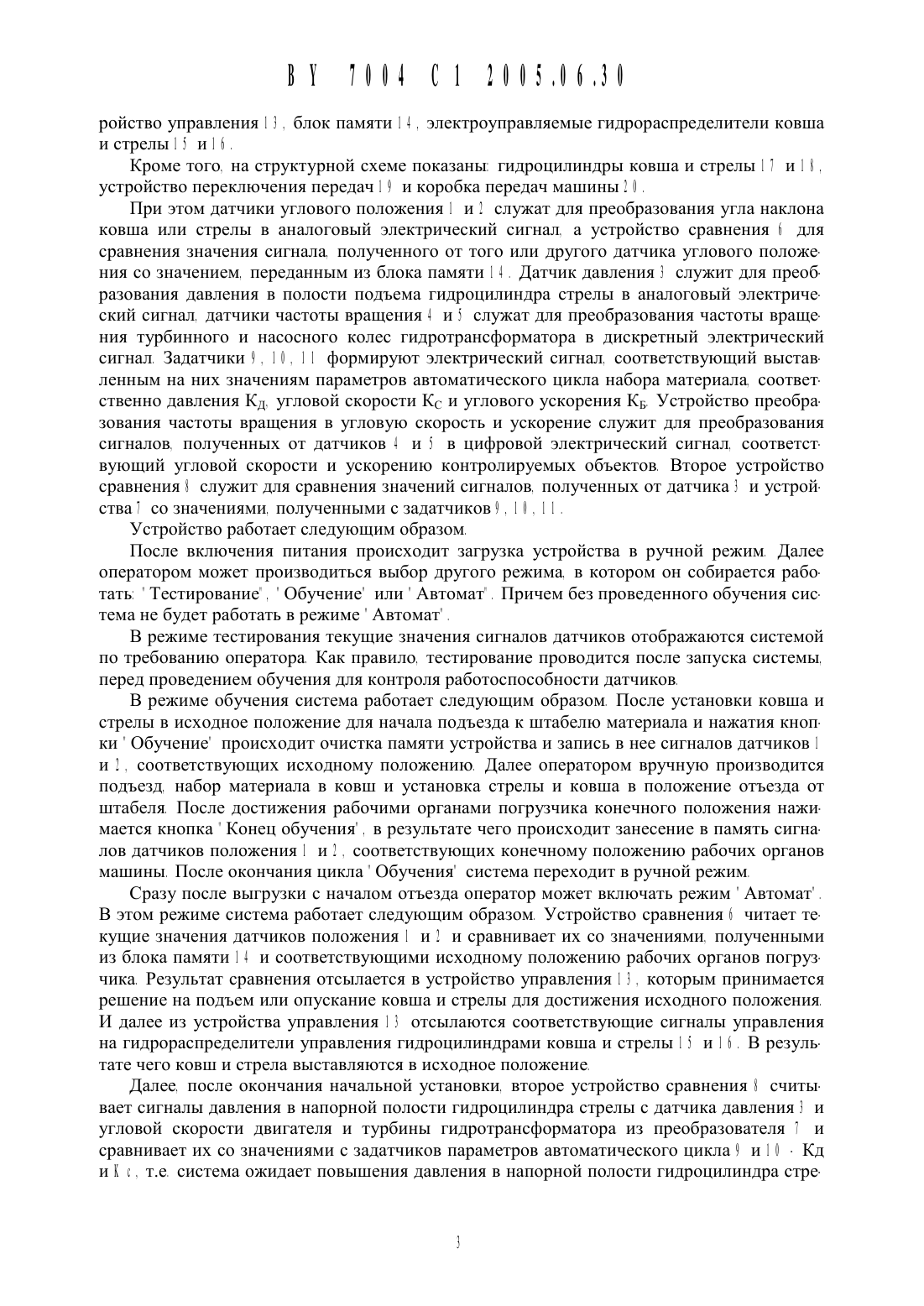
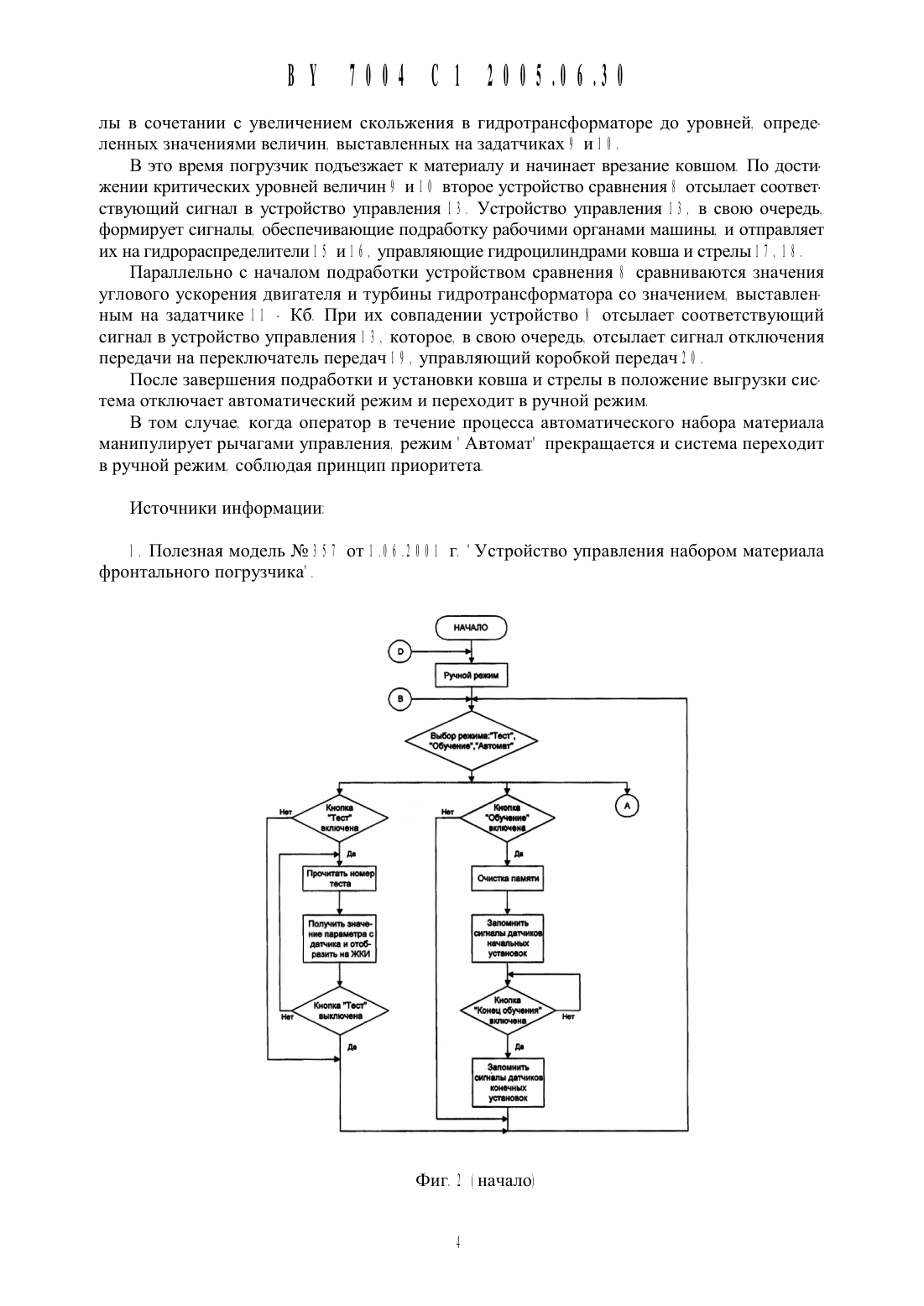
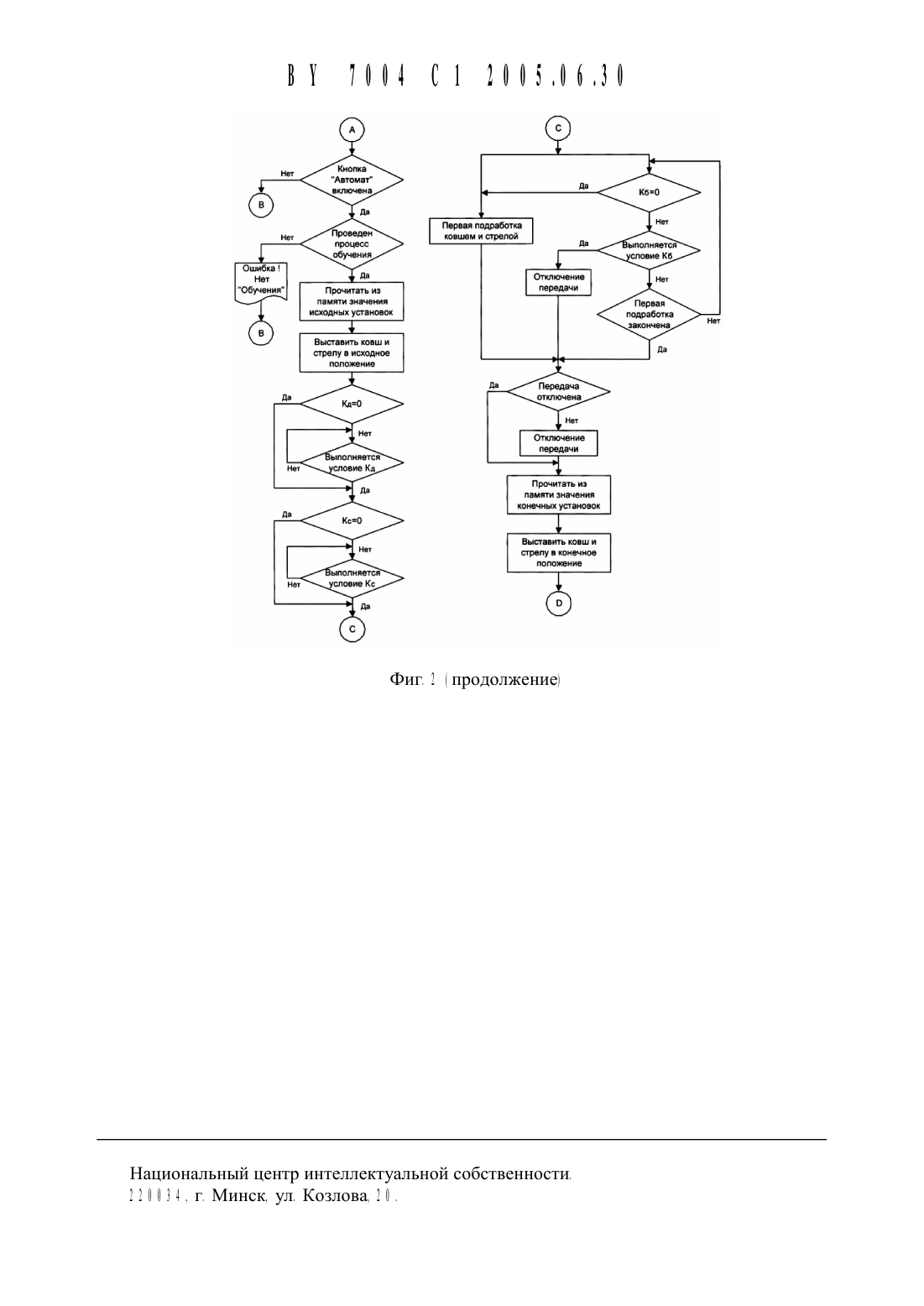
УСТРОЙСТВО УПРАВЛЕНИЯ НАБОРОМ МАТЕРИАЛАН 3 ) Патентообладатель Учреждение обра зования Белорусский государственный аграрный технический университет В У 172 ) Авторы Коломиец Михаил Антоно вич Рожанский Альберт Анатольевич Чудук Сергей Александрович В Т ШУстройство управления набором материала фронтального погрузчика содержащее датчик углового положения ковща и датчик углового положения стрелы. устройство управления с пультом управления и блоком памяти. первое устройство сравнения. на информационные вхо дь 1 которого подаются сигналы от датчиков углового положения ковща и стрелы и из блока памяти. выходом подключенное к устройству управления. отличающееся тем. что содержит датчик частоты вращения двигателя и датчик частоты вращения турбины гидротрансформатора датчик давления в трубопроводе полости подъема гидроцилиндра стрелы. задатчики параметров автоматического Цикла преобразователь частоты вращения в угловую скорость и ускорение. на входы которого поступают сигналы от датчиков частоты вращения. выходами подключенный ко второму устройству сравнения. на входы которого. в свою очередь. поступают сигналы от датчика давления и задатчиков параметров автоматического Цикла. выходомИзобретение относится К области устройств. автоматизирующих работу строительных мащин. в частности процесс набора материала фронтального погрузчика.Наиболее совершенным и близким по технической сущности К изобретению является полезная модель устройства управления набором материала фронтального погрузчика содержащая датчики углового положения ковща и стрелы. устройство сравнения. пульт управления. блок памяти и устройство управления 1 1 .Недостатком устройства 1 1 является то. что рещение о достаточном заполнении ковща принимает оператор. поэтому заполнение ковща на протяжении работы мащины неодинаково и не оптимально. что сказывается на производительности Кроме того. в процессе работы оператор не всегда может вовремя отключить передачу в случае буксования. что приводит к износу трансмиссии и лищнему расходу топливаЗадачами настоящего изобретения являются облегчение работы оператора по управлению рабочим оборудованием погрузчика. повыщение производительности погрузчика за счет сокращения времени. затрачиваемого на цикл набора материала при его многократном повторении. и оптимального заполнения ковща в каждом цикле. повыщение долговечности узлов трансмиссии мащины и экономия топлива за счет сокращения продолжительности или вовсе исключения буксования ведущих колесПоставленные задачи рещаются тем. что в устройство управления набором материала фронтального погрузчика содержащее датчик углового положения ковща и датчик углового положения стрелы. устройство сравнения. на информационные входы которого подаются сигналы от датчиков положения ковща и стрелы и из блока памяти. а выходом подключенное к устройству управления. пульт управления. блок памяти и устройство управления. введены датчики частоты вращения двигателя и турбины гидротрансформатора датчик давления в трубопроводе полости подъема гидроцилиндра стрелы. задатчики параметров автоматического цикла преобразователь частоты вращения в угловую скорость и ускорение. на входы которого поступают сигналы от датчиков частоты вращения. а выходами подключенный ко второму устройству сравнения. второе устройство сравнения. на входы которого. в свою очередь. кроме сигналов от преобразователя частоты вращения в угловую скорость и ускорение. поступают сигналы от датчика давления и задатчиков параметров автоматического цикла а выходом подключенное к устройству управления.1 . В режиме тестирования проверять текущие значения параметров. измеряемых датчиками системы.2 . В режиме обучения запомнить исходное и конечное положения ковща и стрелы. в которые они устанавливаются перед началом процесса набора материала и перед началом процесса выгрузки материала из ковща погрузчика в щтабель или кузов грузового автомобиля3 . В автоматическом режиме выставить ковщ и стрелу в исходное положение. согласно значениям. запомненным в режиме обучения. провести автоматический цикл набора материала в соответствии со значениями. выставленными на задатчиках параметров автоматического цикла выставить ковщ и стрелу в конечное положение - положение выгрузки4 . Соблюдать приоритет ручного управления в течение автоматической операции режим автомат). т.е при любой попытке ручного манипулирования система должна передавать управление оператору- переходить в ручной режим.На рис 1 показана структурная схема устройства управления набором материала фронтального погрузчика. на рис 2 - блок-схема алгоритма его работыУстройство содержит датчики углового положения ковща и стрелы 1 и 2 . давления в напорной полости гидроцилиндра стрелы 3 . частоты вращения двигателя и турбины гидротрансформатора 4 и 5. устройство сравнения 6. устройство преобразования частоты вращения в угловую скорость и ускорение 7 . второе устройство сравнения 8 . задатчики параметров автоматического цикла Кд - давления. КС - угловой скорости и К - ускорения двигателя и турбины гидротрансформатора 9 . 1 0 и 1 1 . пульт ручного управления 1 2 . уст В 44 44440124454494ройство управления 4 3 . блок памяти 4 4 . электроуправляемь 1 е гидрораспределители ковща истрелы 45 и 46.Кроме того. на структурной схеме показаны гидроцилиндры ковща и стрелы 4 4 и 4 4 . устройство переключения передач 4 9 и коробка передач Машины 2 44 .При этом датчики углового положения 4 и 2 служат для преобразования угла наклона ковща или стрелы в аналоговый электрический сигнал. а устройство сравнения 6 для сравнения значения сигнала. полученного от того или другого датчика углового положения со значением. переданным из блока памяти 4 4 . Датчик давления 3 служит для преобразования давления в полости подъема гидроцилиндра стрелы в аналоговый электрический сигнал. датчики частоты вращения 4 и 5 служат для преобразования частоты вращения турбинного и насосного колес гидротрансформатора в дискретный электрический сигнал Задатчики 9 . 4 44 . 4 4 формируют электрический сигнал. соответствующий вь 1 ставленным на них значениям параметров автоматического цикла набора материала соответственно давления Кд. угловой скорости Кс и углового ускорения КБ Устройство преобразования частоты вращения в угловую скорость и ускорение служит для преобразования сигналов. полученных от датчиков 4 и 5 в цифровой электрический сигнал. соответствующий угловой скорости и ускорению контролируемых объектов. Второе устройство сравнения 4 служит для сравнения значений сигналов. полученных от датчика 3 и устройства 4 со значениями. полученными с задатчиков 9 . 4 44 . 4 4 .Устройство работает следующим образом.После включения питания происходит загрузка устройства в ручной режим. Далее оператором может производиться выбор другого режима. в котором он собирается работать Тестирование . Обучение или Автомат . Причем без проведенного обучения система не будет работать в режиме Автомат .В режиме тестирования текущие значения сигналов датчиков отображаются системой по требованию оператора Как правило. тестирование проводится после запуска системы. перед проведением обучения для контроля работоспособности датчиковВ режиме обучения система работает следующим образом После установки ковща и стрелы в исходное положение для начала подъезда к щтабелю материала и нажатия кнопки Обучение происходит очистка памяти устройства и запись в нее сигналов датчиков 4 и 2 . соответствующих исходному положению. Далее оператором вручную производится подъезд. набор материала в ковщ и установка стрелы и ковща в положение отъезда от щтабеля После достижения рабочими органами погрузчика конечного положения нажимается кнопка Конец обучения . в результате чего происходит занесение в память сигналов датчиков положения 4 и 2 . соответствующих конечному положению рабочих органов мащины После окончания цикла Обучения система переходит в ручной режимСразу после выгрузки с началом отъезда оператор может включать режим Автомат . В этом режиме система работает следующим образом Устройство сравнения 6 читает текущие значения датчиков положения 4 и 2 и сравнивает их со значениями. полученными из блока памяти 4 4 и соответствующими исходному положению рабочих органов погрузчика Результат сравнения отсылается в устройство управления 4 3 . которым принимается рещение на подъем или опускание ковща и стрелы для достижения исходного положения. И далее из устройства управления 4 3 отсылаются соответствующие сигналы управления на гидрораспределители управления гидроцилиндрами ковща и стрелы 4 5 и 4 6 . В результате чего ковщ и стрела выставляются в исходное положение.Далее. после окончания начальной установки. второе устройство сравнения 4 счить 1 вает сигналы давления в напорной полости гидроцилиндра стрелы с датчика давления 4 и угловой скорости двигателя и турбины гидротрансформатора из преобразователя 4 и сравнивает их со значениями с задатчиков параметров автоматического цикла 9 и 4 44 - Кд и 44 с . т.е система ожидает повыщения давления в напорной полости гидроцилиндра стре ВУ 7004 С 12005.06.30ль 1 в сочетании с увеличением скольжения в гидротрансформаторе до уровней. определенных значениями величин. выставленных на задатчиках 9 и 1 0 .В это время погрузчик подъезжает К материалу и начинает врезание ковшом По достижении критических уровней величин 9 и 1 0 второе устройство сравнения В отсылает соответствующий сигнал в устройство управления 1 3 . Устройство управления 1 3 . в свою очередь. формирует сигналы. обеспечивающие подработку рабочими органами мащины. и отправляет их на гидрораспределители 1 5 и 1 6 . управляющие гидроцилиндрами ковща и стрелы 7 . 1 В .Параллельно с началом подработки устройством сравнения В сравниваются значения углового ускорения двигателя и турбины гидротрансформатора со значением. вь 1 ставленным на задатчике 1 1 - Кб При их совпадении устройство В отсылает соответствующий сигнал в устройство управления 1 3 . которое. в свою очередь. отсылает сигнал отключения передачи на переключатель передач 1 9 . управляющий коробкой передач 3 0 .После заверщения подработки и установки ковща и стрелы в положение выгрузки система отключает автоматический режим и переходит в ручной режим.В том случае. когда оператор в течение процесса автоматического набора материала манипулирует рычагами управления. режим Автомат прекращается и система переходит в ручной режим. соблюдая принцип приоритета1 . Полезная модель Не 3 5 7 от 1 О 6 0 0 1 г Устройство управления набором материала фронтального погрузчика .
МПК / Метки
Метки: устройство, управления, набором, материала, погрузчика, фронтального
Код ссылки
<a href="https://by.patents.su/5-7004-ustrojjstvo-upravleniya-naborom-materiala-frontalnogo-pogruzchika.html" rel="bookmark" title="База патентов Беларуси">Устройство управления набором материала фронтального погрузчика</a>
Устройство управления набором материала фронтального погрузчика
Номер патента: U 357
Опубликовано: 30.09.2001
Авторы: Рожанский Альберт Анатольевич, Коломиец Михаил Антонович, Лозовский Юрий Семенович, Чудук Сергей Александрович
МПК: G05D 3/00
Метки: фронтального, материала, управления, устройство, погрузчика, набором
Текст:
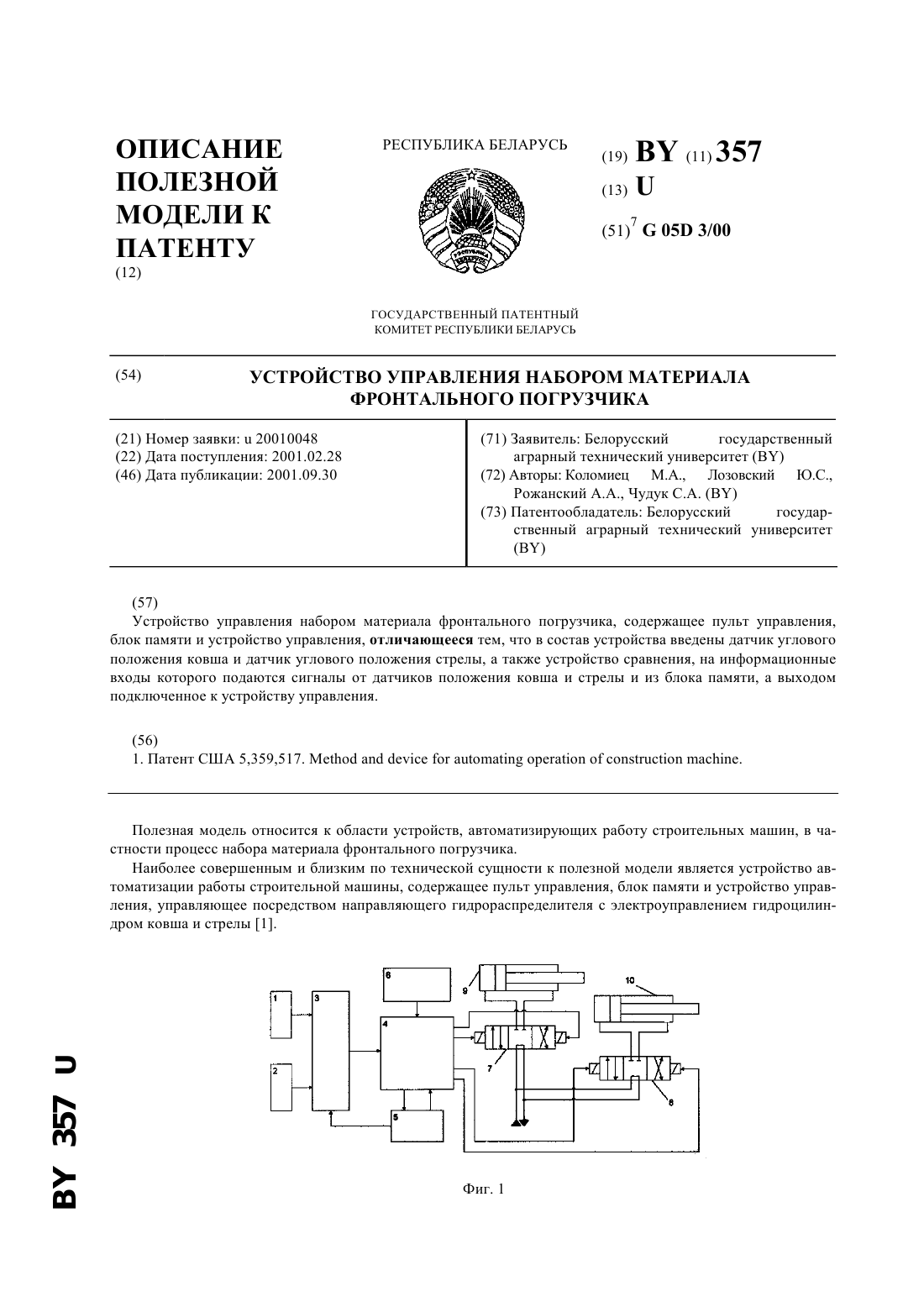
...на рис. 2 - блоксхема алгоритма его работы. Устройство содержит датчики углового положения ковша и стрелы 1 и 2, устройство сравнения 3, устройство управления 4, блок памяти 5, пульт управления 6, электроуправляемые гидрораспределители ковша и стрелы 7 и 8, гидроцилиндры ковша и стрелы 9 и 10. При этом датчики углового положения 1 и 2 служат для преобразования угла наклона рычага ковша или стрелы в аналоговый электрический сигнал, а...
Гидропривод одноковшового фронтального погрузчика
Номер патента: 1633
Опубликовано: 30.03.1997
Авторы: Метлюк Николай Федорович, Смирнов Анатолий Николаевич, Барковский Александр Александрович, Автушко Валентин Петрович, Степанович Виталий Павлович
Метки: гидропривод, фронтального, погрузчика, одноковшового
Текст:
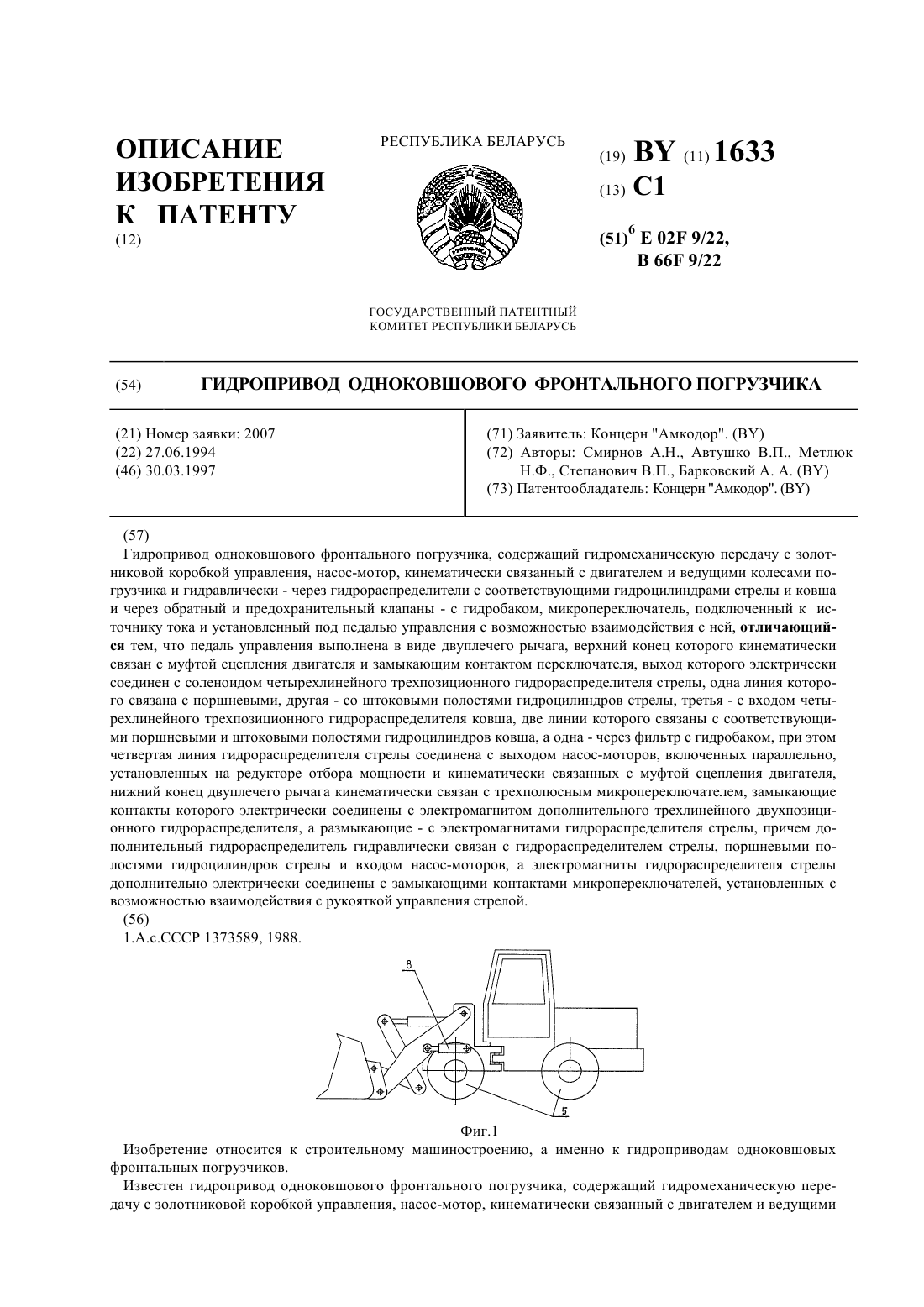
...реверсивный насос-мотор и гидропневмоаккумулятор, что упрощает конструкцию. Сущность изобретения поясняется чертежами. На фиг.1 представлен общий вид погрузчика на фиг. 2 принципиальная гидравлическая схема. Гидропривод одноковшового фронтального погрузчика содержит гидромеханическую передачу с золотниковой коробкой управления 1. Насосы-моторы 2 и 3, кинематически связанные с двигателем 4 и ведущими колесами 5 погрузчика и...
Весоизмерительное устройство стрелового ковшевого погрузчика
Номер патента: 3177
Опубликовано: 30.12.1999
Авторы: Спиридонов Сергей Владимирович, Рожанский Альберт Анатольевич, Юдчиц Николай Николаевич, Барташ Василий Степанович, Заикин Сергей Александрович, Буцкий Вениамин Васильевич, Ярошко Михаил Евгеньевич, Терещенко Александр Константинович
МПК: G01G 19/10, G01G 19/08
Метки: весоизмерительное, погрузчика, ковшевого, стрелового, устройство
Текст:
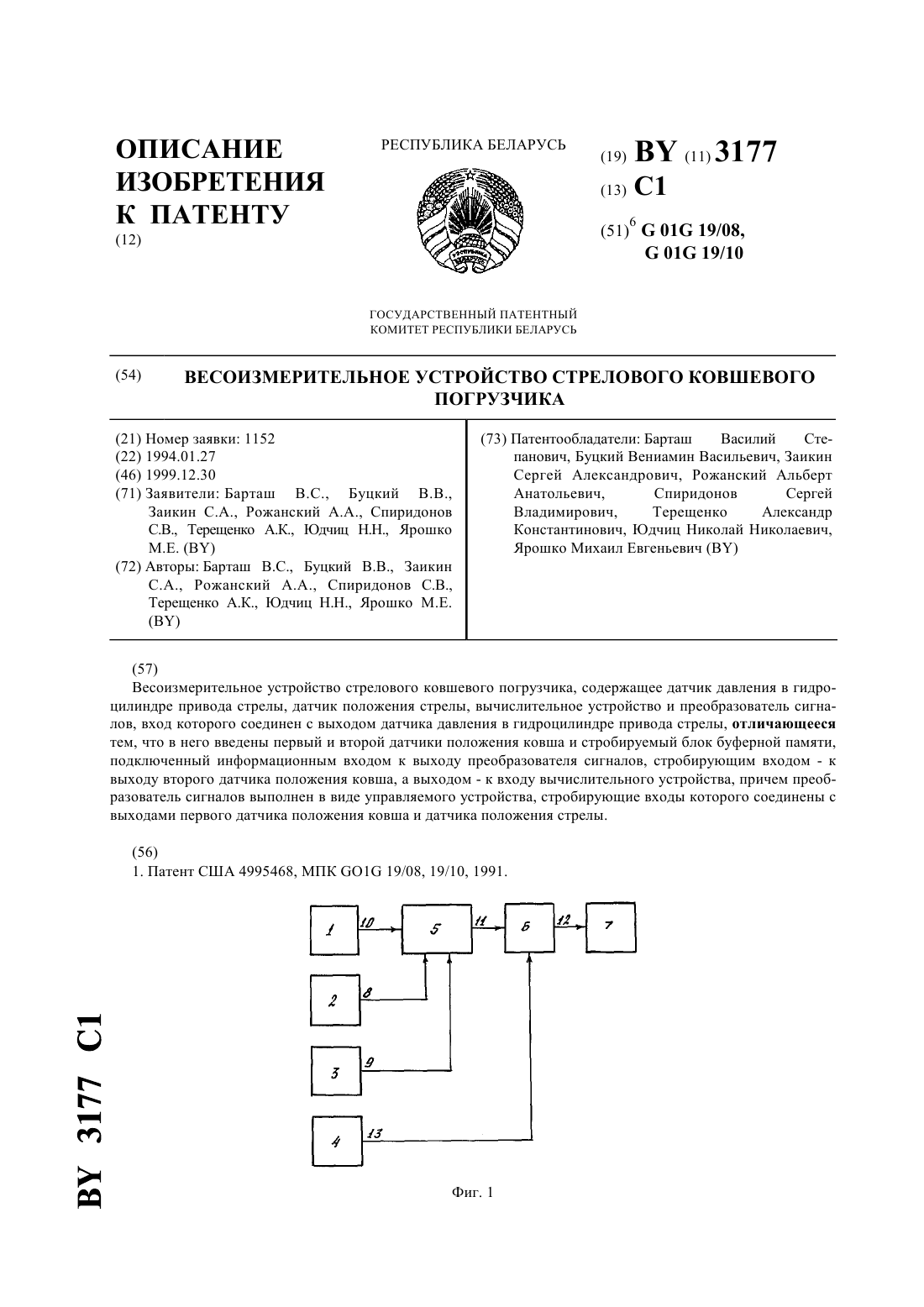
...с выходом первого датчика положения ковша и датчика положения стрелы. Такой состав устройства позволяет проводить измерения веса груза в заданном положении стрелы и ковша, что индуцируется сигналами простых, работающих по принципу да-нет датчиков положения стрелы и ковша при полной автоматизации процесса измерения и дополнительно повышает точность измерения за счет исключения повторного учета груза благодаря введению второго датчика...
Быстросъемное соединение сменного рабочего органа фронтального гидравлического погрузчика со стрелой

Номер патента: U 649
Опубликовано: 30.09.2002
Авторы: Луговнев Александр Васильевич, Азаров Владимир Петрович
МПК: E02F 3/36
Метки: сменного, стрелой, погрузчика, органа, фронтального, рабочего, соединение, гидравлического, быстросъемное
Текст:
...надежность из-за сложности конструкции треугольных кронштейнов и выполнения опорного элемента для крюков в виде стрежня с консольными концами. Недостаточная жесткость конструкции, вследствие чего при работе одного двухстороннего цилиндра возможны случаи заедания. Раздельные верхние крюки и нижние зацепы на сменных рабочих органах при эксплуатации предрасполагают к перекосам, а при изготовлении не технологичны. В основу решаемой полезной...
Гидропривод одноковшового фронтального погрузчика

Номер патента: U 1965
Опубликовано: 30.06.2005
Авторы: Шибеко Алексей Сергеевич, Щемелев Анатолий Мефодьевич
МПК: E02F 9/22
Метки: гидропривод, фронтального, погрузчика, одноковшового
Текст:
...создания тормозного момента на движителе при движении машины как в прямом,так и в обратном направлении.Гидравлическое соединение насос-мотора с напорным клапаном обеспечивает разгрузку гидронасоса при превышении давления настройки.Гидравлическое соединение насос-мотора с штатной гидросистемой через нормально открытый регулятор потока, настроенный на минимальную подачу насос-мотора, обеспечивает подпитку штатной гидросистемы, охлаждение...
Предыдущий патент: Модель адаптивного материала
Следующий патент: Система для регулирования подачи топлива двигателя внутреннего сгорания
Случайный патент: Способ лечения заболеваний внутренних оболочек глаза и устройство для его реализации