Устройство для контроля перемещения транспортного средства
Номер патента: 4947
Опубликовано: 30.03.2003
Авторы: Демьяненко Анатолий Валентинович, Чалый Александр Андреевич, Мороз Александр Антонович

Текст
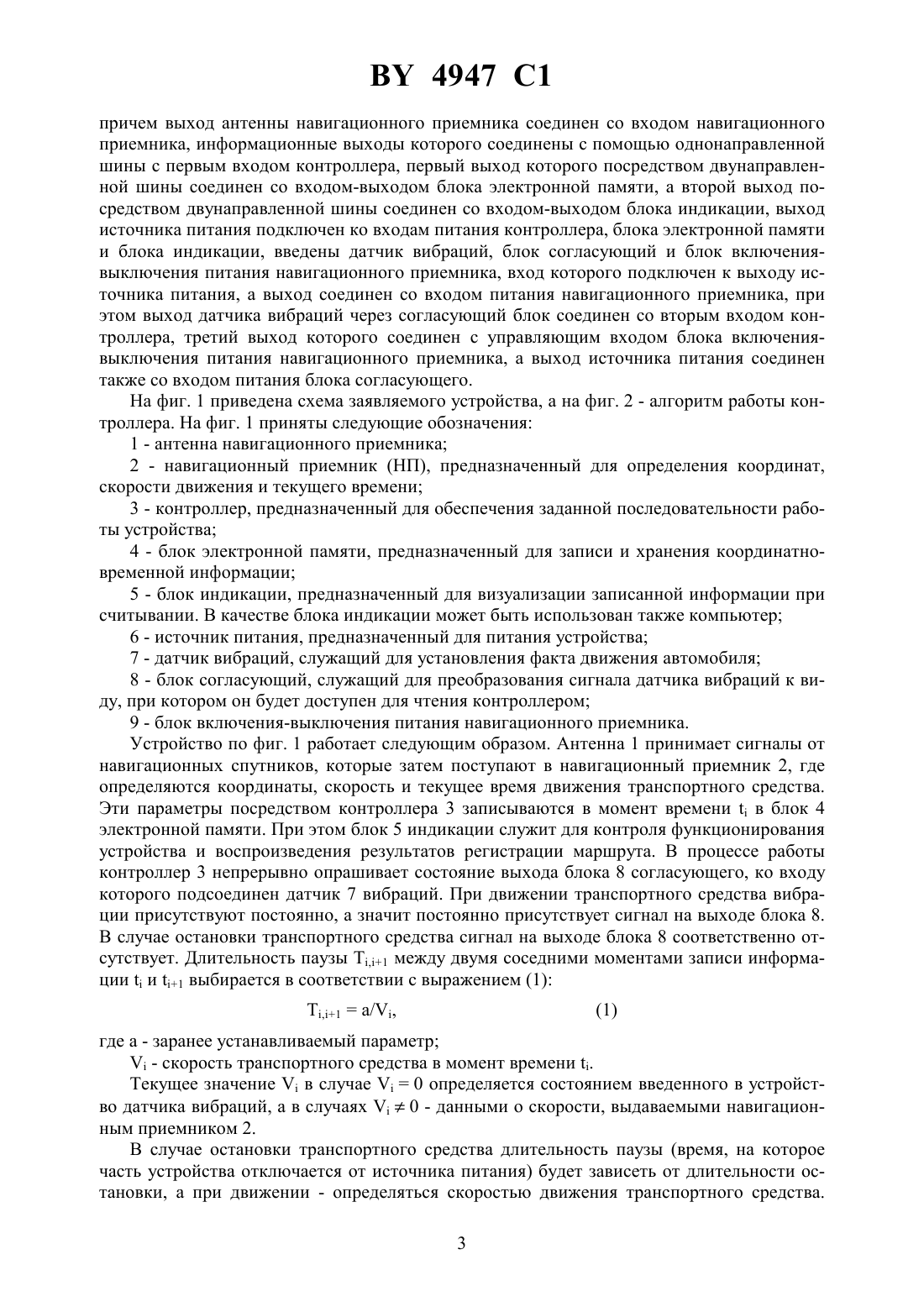
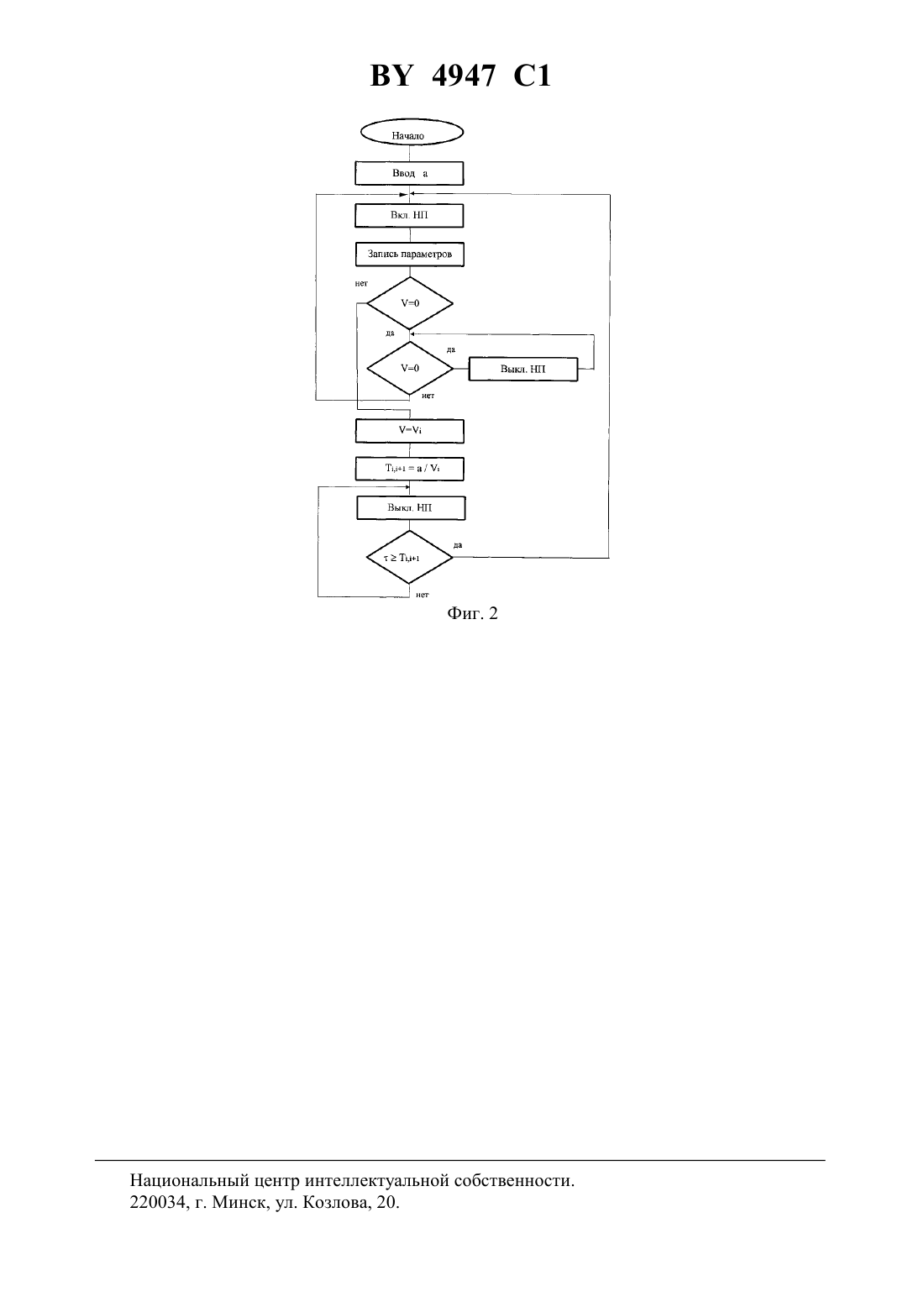
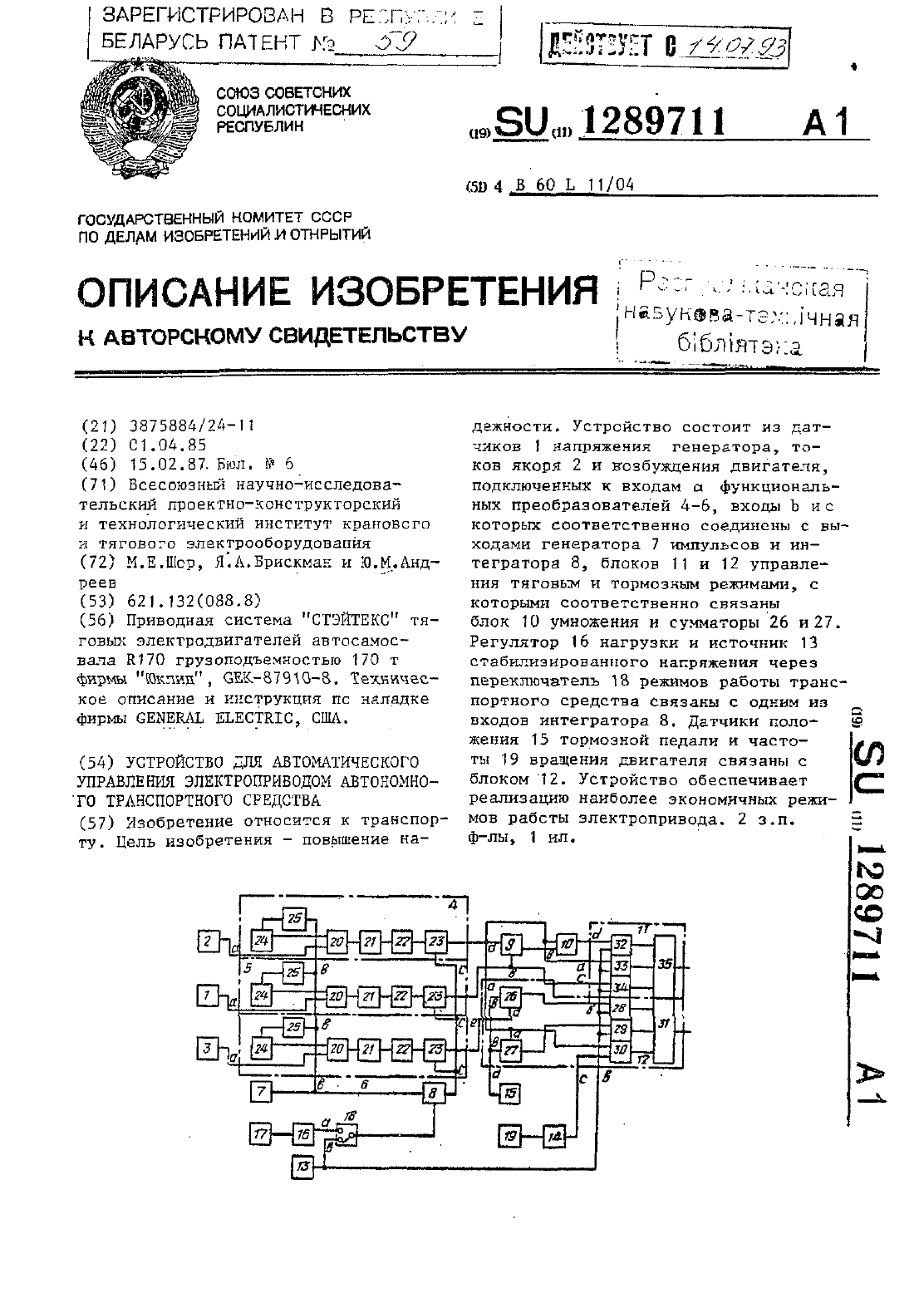
01 9/00 НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА(71) Заявитель Научно-производственное республиканское унитарное предприятие СКБ КАМЕРТОН(72) Авторы Демьяненко Анатолий Валентинович Мороз Александр Антонович Чалый Александр Андреевич(73) Патентообладатель Научно-производственное республиканское унитарное предприятие СКБ КАМЕРТОН(57) Устройство для контроля перемещения транспортного средства, содержащее антенну навигационного приемника, навигационный приемник, контроллер, блок электронной памяти, блок индикации и источник питания, причем выход антенны навигационного приемника соединен со входом навигационного приемника, информационные выходы которого соединены с помощью однонаправленной шины с первым входом контроллера,первый выход которого посредством двунаправленной шины соединен со входом-выходом блока электронной памяти, а второй выход посредством двунаправленной шины соединен со входом-выходом блока индикации, выход источника питания подключен ко входам питания контроллера, блока электронной памяти и блока индикации, отличающееся тем, Фиг. 1 4947 1 что содержит датчик вибраций, блок согласующий и блок включения-выключения питания навигационного приемника, вход которого подключен к выходу источника питания, а выход соединен со входом питания навигационного приемника, при этом выход датчика вибраций через согласующий блок соединен со вторым входом контроллера, третий выход которого соединен с управляющим входом блока включения-выключения питания навигационного приемника, а выход источника питания соединен также со входом питания блока согласующего. Изобретение относится к области спутниковой радионавигации, в частности к области устройств для регистрации, в том числе скрытной, маршрута и параметров движения транспортных средств с использованием сигналов навигационных спутников Земли. Известны устройства (ЕР 0699894 А 2, 1996 г. и 4758959 А 1988 г.), предназначенные для определения и записи в электронную память текущих координат транспортного средства. Недостатком известных устройств является большое энергопотребление, обусловленное непрерывным режимом их работы. Наиболее близким по совокупности существенных признаков к заявляемому является устройство (ЕП 0504542 3, 1993), предназначенное для определения местоположения транспортного средства, времени такого определения и записи этих параметров в электронную память устройства. Оно содержит навигационный приемник спутниковой радионавигационной системы , набор датчиков для регистрации параметров движения транспортного средства, блок электронной памяти, контроллер, блок управления и блок питания. Определенные с помощью навигационного приемника навигационно-временные параметры посредством контроллера записываются в электронную память устройства,причем интервал между двумя соседними записями выбирается в соответствии с расстоянием, пройденным транспортным средством. Однако в устройстве-прототипе не предусмотрена работа в режиме периодического отключения наиболее энергопотребляющих частей, т.е. оно работает непрерывно. Из этого следует, что известное устройство потребляет много энергии, что существенно сокращает время работы при питании от автономного источника. В то же время питание от автономного источника обязательно при скрытной регистрации маршрута. Кроме того, входящие в состав устройства датчики, в частности датчик пройденного расстояния, требуют соединения с механизмами и приборами транспортного средства. Это сужает возможности известного устройства по скрытной установке и регистрации маршрута движения транспортного средства. Задачей настоящего изобретения является уменьшение энергопотребления устройства путем периодического отключения от источника питания его наиболее энергопотребляющей части - навигационного приемника. Поставленная задача решается тем, что в устройство для контроля перемещения транспортного средства, содержащее антенну навигационного приемника, навигационный приемник, контроллер, блок электронной памяти, блок индикации и источник питания,2 4947 1 причем выход антенны навигационного приемника соединен со входом навигационного приемника, информационные выходы которого соединены с помощью однонаправленной шины с первым входом контроллера, первый выход которого посредством двунаправленной шины соединен со входом-выходом блока электронной памяти, а второй выход посредством двунаправленной шины соединен со входом-выходом блока индикации, выход источника питания подключен ко входам питания контроллера, блока электронной памяти и блока индикации, введены датчик вибраций, блок согласующий и блок включениявыключения питания навигационного приемника, вход которого подключен к выходу источника питания, а выход соединен со входом питания навигационного приемника, при этом выход датчика вибраций через согласующий блок соединен со вторым входом контроллера, третий выход которого соединен с управляющим входом блока включениявыключения питания навигационного приемника, а выход источника питания соединен также со входом питания блока согласующего. На фиг. 1 приведена схема заявляемого устройства, а на фиг. 2 - алгоритм работы контроллера. На фиг. 1 приняты следующие обозначения 1 - антенна навигационного приемника 2 - навигационный приемник (НП), предназначенный для определения координат,скорости движения и текущего времени 3 - контроллер, предназначенный для обеспечения заданной последовательности работы устройства 4 - блок электронной памяти, предназначенный для записи и хранения координатновременной информации 5 - блок индикации, предназначенный для визуализации записанной информации при считывании. В качестве блока индикации может быть использован также компьютер 6 - источник питания, предназначенный для питания устройства 7 - датчик вибраций, служащий для установления факта движения автомобиля 8 - блок согласующий, служащий для преобразования сигнала датчика вибраций к виду, при котором он будет доступен для чтения контроллером 9 - блок включения-выключения питания навигационного приемника. Устройство по фиг. 1 работает следующим образом. Антенна 1 принимает сигналы от навигационных спутников, которые затем поступают в навигационный приемник 2, где определяются координаты, скорость и текущее время движения транспортного средства. Эти параметры посредством контроллера 3 записываются в момент временив блок 4 электронной памяти. При этом блок 5 индикации служит для контроля функционирования устройства и воспроизведения результатов регистрации маршрута. В процессе работы контроллер 3 непрерывно опрашивает состояние выхода блока 8 согласующего, ко входу которого подсоединен датчик 7 вибраций. При движении транспортного средства вибрации присутствуют постоянно, а значит постоянно присутствует сигнал на выходе блока 8. В случае остановки транспортного средства сигнал на выходе блока 8 соответственно отсутствует. Длительность паузы Т,1 между двумя соседними моментами записи информациии 1 выбирается в соответствии с выражением (1) где а - заранее устанавливаемый параметр- скорость транспортного средства в момент времени . Текущее значениев случае 0 определяется состоянием введенного в устройство датчика вибраций, а в случаях 0 - данными о скорости, выдаваемыми навигационным приемником 2. В случае остановки транспортного средства длительность паузы (время, на которое часть устройства отключается от источника питания) будет зависеть от длительности остановки, а при движении - определяться скоростью движения транспортного средства. 3 4947 1 Отключение и подключение навигационного приемника 2 к источнику 6 питания происходит при помощи блока 9 включения-выключения питания навигационного приемника 2 по команде контроллера 3, поступающей на управляющий вход этого блока 9. Алгоритм работы контроллера 3 по обеспечению указанной последовательности работы устройства представлен на фиг. 2 и заключается в следующем. задается численное значение параметра а (см. выражение 1) на третьем выходе контроллера 3 устанавливается значение управляющего напряжения упр.1, которое замыкает ключ блока 9 включения-выключения питания навигационного приемника и тем самым подает питание на навигационный приемник 2, который определяет координаты транспортного средства, его скорость и текущее время в блок 4 электронной памяти производится запись полученных координат транспортного средства, его скорости и текущего времени посредством второго входа контроллера 3 опрашивается состояние выхода блока 8, в результате которого принимается решение да - если транспортное средство неподвижно, т.е.0, и нет - если транспортное средство перемещается, т.е.0 если да, то на третьем выходе контроллера 3 вырабатывается сигнал упр.0, который приводит к размыканию ключа блока 9 и отключению питания от навигационного приемника 2. Это состояние продолжается во все время стоянки транспортного средства если нет, то происходит измерение текущей скорости транспортного средстваи определение длительности паузы Т,1, на время которой необходимо отключить навигационный приемник 2 от источника 6 питания в соответствии с выражением (1). На третьем выходе контроллера 3 вырабатывается сигнал упр.0, который приводит к размыканию ключа блока 9 и отключению питания от навигационного приемника 2. Это состояние продолжается в течение промежутка времени, когда значение переменнойменьше Т,1 (логическое состояние нет). Здесь- время, прошедшее с момента данного размыкания ключа блока 9 по истечении этого промежутка времени (логическое состояние да) на третьем выходе контроллера 3 вырабатывается сигнал упр.1, который приводит к замыканию ключа блока 9 и подаче питания на навигационный приемник 2 в дальнейшем работа алгоритма повторяется завершение работы алгоритма по фиг. 2 происходит по отключению всего устройства от источника 6 питания (на фиг. 2 не показано). Таким образом, в предлагаемом устройстве запись информации о маршруте адаптирована под скорость движения транспортного средства, т.е. запись информации чередуется с паузами в работе навигационного приемника 2, осуществляемых путем его отключения от источника 6 питания. Из выражения (1) следует, что чем меньше скорость движения транспортного средства, тем больше пауза между двумя соседними записями информации в блок 4 электронной памяти, и в случае остановки автомобиля (0) запись прекращается. Т.к. на время паузы Т,1 навигационный приемник 2, потребляющий до 80 энергии, отключается от источника 6 питания, то тем самым достигается экономия энергии этого источника, а значит - происходит увеличение времени непрерывной работы устройства в целом, что и решает поставленную задачу. Функционирование устройства происходит полностью автономно и не требует подключения к каким-либо узлам и механизмам транспортного средства. В совокупности, минимальное энергопотребление и автономность работы позволяют производить скрытную установку устройства на транспортное средство. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G01D 9/00, G01C 21/20
Метки: устройство, перемещения, контроля, средства, транспортного
Код ссылки
<a href="https://by.patents.su/5-4947-ustrojjstvo-dlya-kontrolya-peremeshheniya-transportnogo-sredstva.html" rel="bookmark" title="База патентов Беларуси">Устройство для контроля перемещения транспортного средства</a>
Устройство для автоматического управления электроприводом автономного транспортного средства
Номер патента: 59
Опубликовано: 30.09.1994
Авторы: Андреев Ю. М., Брискман Я. А., Шор М. Е.
МПК: B60L 11/04
Метки: управления, транспортного, автономного, средства, автоматического, электроприводом, устройство
Текст:
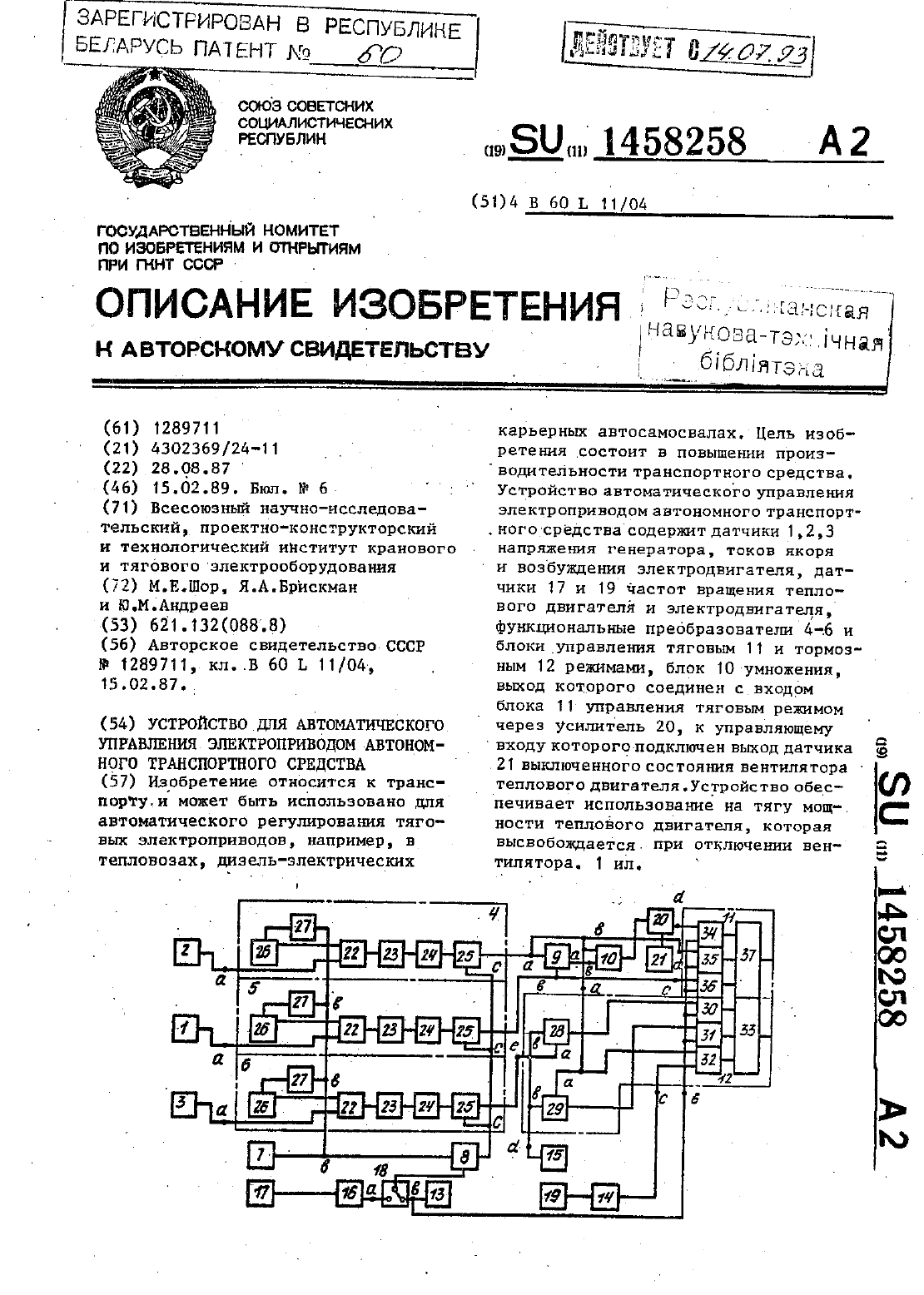
...16 нагрузки преобразует период частоты вращения теплового двигателя в напряжение ПСигнал напряжения, пропорционапьный периоду частоты Ед алгебраически суммируется с постоянным иапряжением которое-корректирует зависимость мощности злектроцвигателя Р от частоты ЕдДВеличина текущего значения вынодного напряжения интегратора 8 пропорциональна величине входного напряжения Сы При этом сигнал навыходе блока 23-памяти пропорционален величине...
Устройство для автоматического управления электроприводом автономного транспортного средства
Номер патента: 60
Опубликовано: 30.09.1994
Авторы: Андреев Ю. М., Шор М. Е., Брискман Я. А.
МПК: B60L 11/04
Метки: автоматического, электроприводом, автономного, транспортного, управления, средства, устройство
Текст:
...времени напряжения на выходе-интегра- равномн соседними имулвсами на вьшоде пр К 4 51 КБ-г 1 екомпаратора 22 пропорционален значе Где р павнию измеряемого напряжения Н. Формирователь 23 по переднему фронту нмпульсов компаратора 22 формирует 15где К 4 К 1 К 1 кк,. ч 7 Ед - регулируемый-коэффициент, учитывающй джоулевые поте 7 и 1щееся на выходе интегратора 8 В этот 2 П датиик 21 состояня вентилятора теплового двигателя-формирует логичес...
Способ перемещения транспортного средства
Номер патента: 2201
Опубликовано: 30.06.1998
Автор: Гурков Иван Иванович
МПК: B64C 39/00
Метки: способ, транспортного, средства, перемещения
Устройство для диагностирования транспортного средства
Номер патента: 4824
Опубликовано: 30.12.2002
Авторы: Башаримова Валентина Николаевна, Геращенко Василий Васильевич, Жадик Павел Васильевич, Яскевич Михаил Яковлевич, Жадик Александр Васильевич
МПК: B60K 41/00
Метки: средства, диагностирования, устройство, транспортного
Текст:
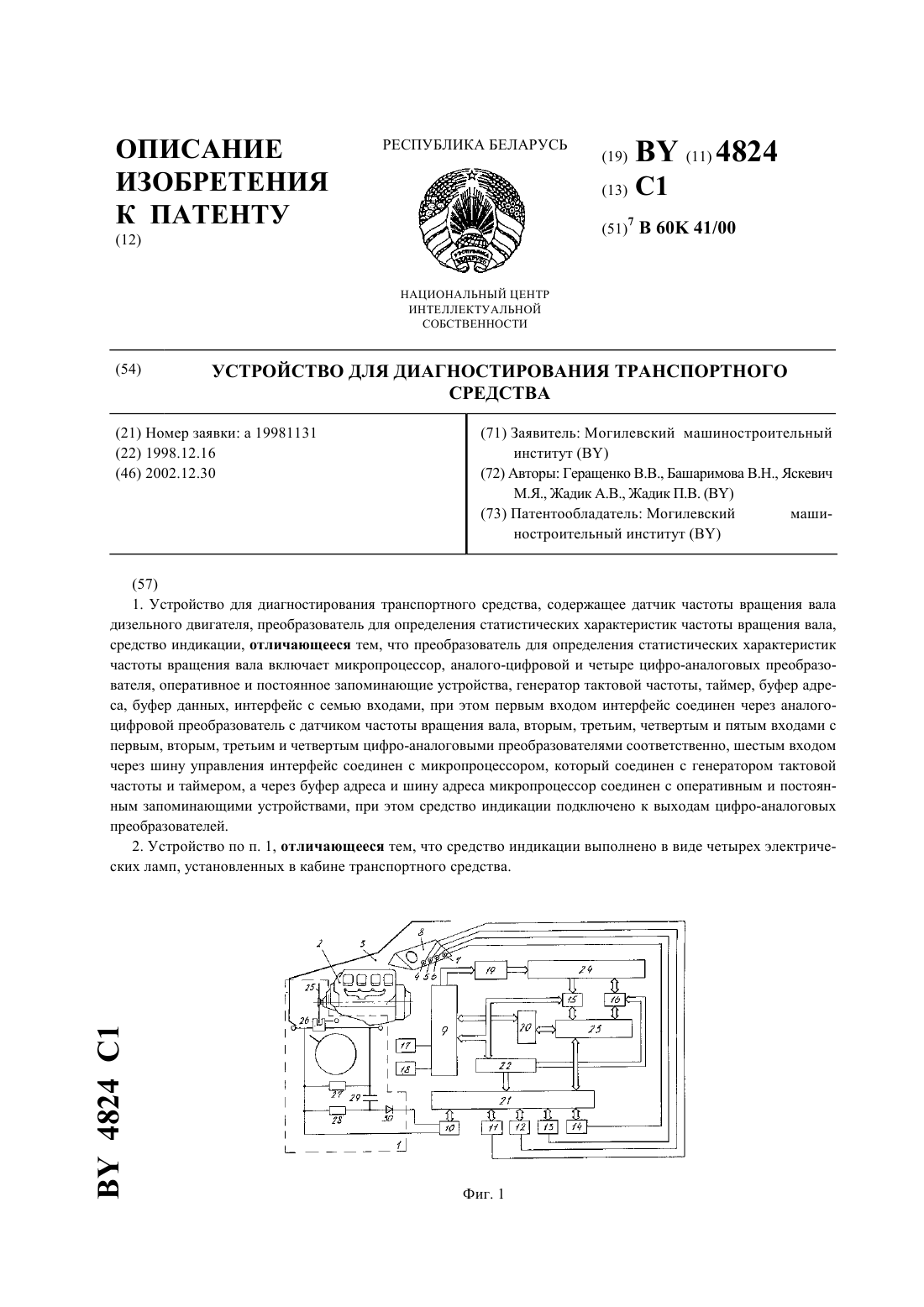
...4824 1 преобразователями соответственно, шестым входом через шину управления интерфейс соединен с микропроцессором, который соединен с генератором тактовой частоты и таймером, а через буфер адреса и шину адреса микропроцессор соединен с оперативным и постоянным запоминающими устройствами, при этом средство индикации подключено к выходам цифро-аналоговых преобразователей. Средство индикации выполнено в виде четырех электрических ламп,...
Противоблокировочное устройство для тормозной системы транспортного средства
Номер патента: 74
Опубликовано: 30.09.1994
Авторы: Жук Ю. Г., Титович А. И., Рудак А. В., Мальцев Николай Григорьевич
МПК: B60T 8/88
Метки: системы, средства, тормозной, устройство, транспортного, противоблокировочное
Текст:
...ОЗУ. у При этом питание устройства осуществляется от источника питания считывающеготорможения происходит следующим обра-с зомл.лес с выходов формирователей 2 поочередно поступают через ходной мультиплексор 16 на вход разрешения счета счетчика 17.при наличии признака торможения. формируемого элементом ИЛИ 29 из сигналов датчика торможения (не показан) и выходного сигнала пороговое замедление диф ференциатора 2 врзапускается счетчик...
Предыдущий патент: Композиция для покрытий
Следующий патент: Стыковое соединение строительных изделий
Случайный патент: Порошковый антифрикционный материал на основе железа