Одноосевой линейный шаговый электродвигатель
Номер патента: 17600
Опубликовано: 30.10.2013
Авторы: Огер Виктор Павлович, Сайганов Владимир Алексеевич, Хомутов Эдуард Федорович, Хомутов Виталий Эдуардович, Безлюдов Андрей Валерьевич
Текст
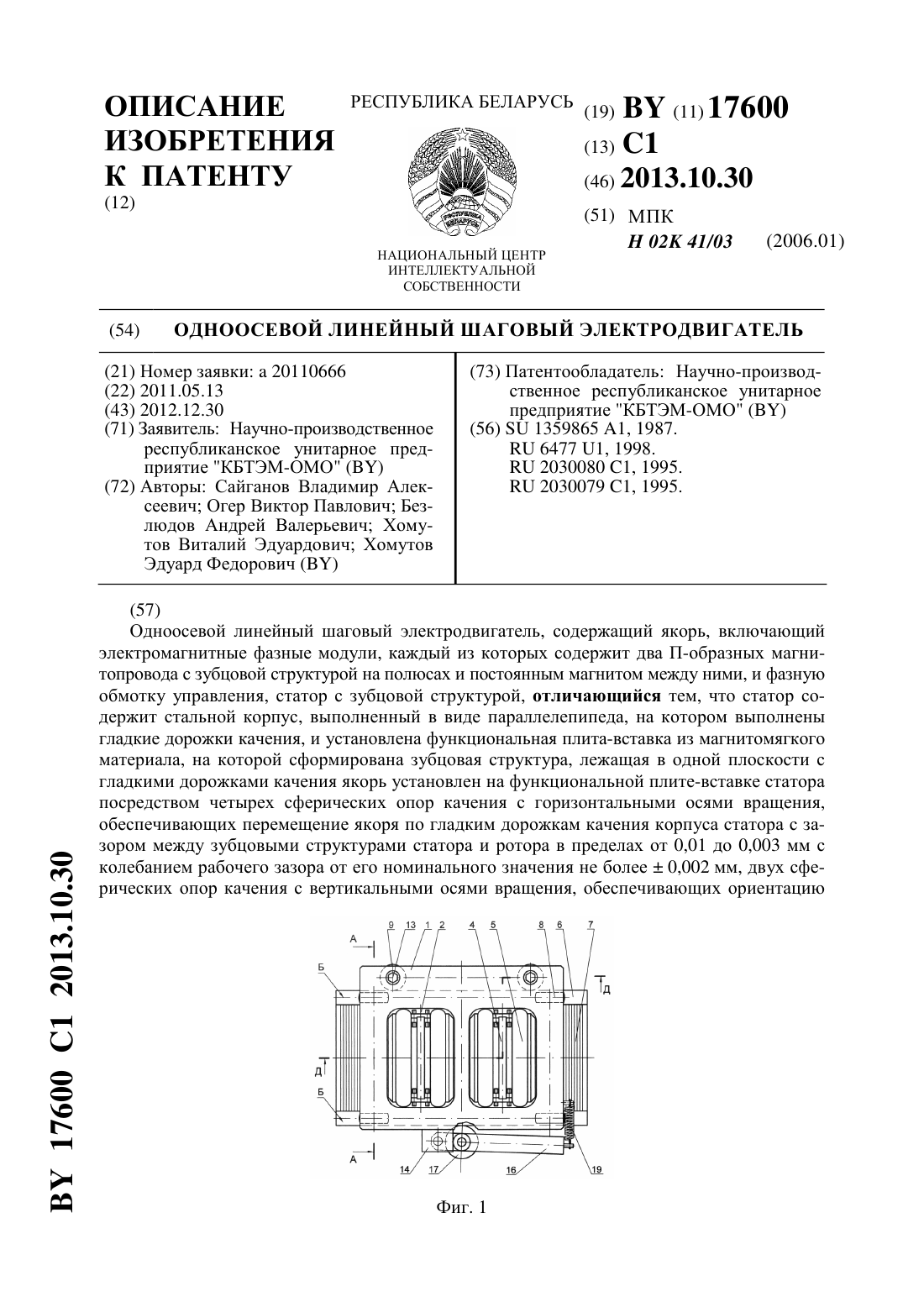
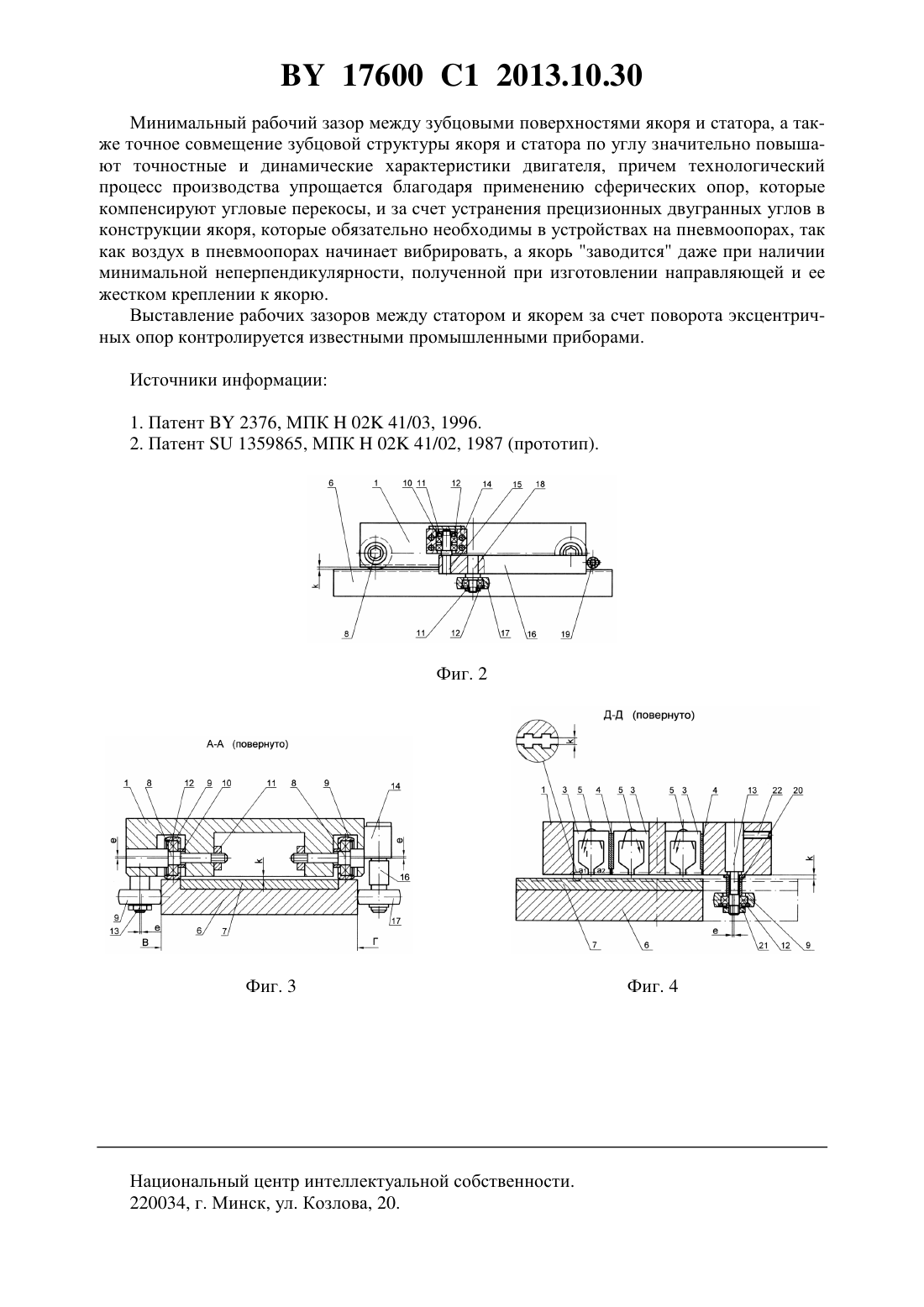
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ОДНООСЕВОЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ(71) Заявитель Научно-производственное республиканское унитарное предприятие КБТЭМ-ОМО(72) Авторы Сайганов Владимир Алексеевич Огер Виктор Павлович Безлюдов Андрей Валерьевич Хомутов Виталий Эдуардович Хомутов Эдуард Федорович(73) Патентообладатель Научно-производственное республиканское унитарное предприятие КБТЭМ-ОМО(57) Одноосевой линейный шаговый электродвигатель, содержащий якорь, включающий электромагнитные фазные модули, каждый из которых содержит два П-образных магнитопровода с зубцовой структурой на полюсах и постоянным магнитом между ними, и фазную обмотку управления, статор с зубцовой структурой, отличающийся тем, что статор содержит стальной корпус, выполненный в виде параллелепипеда, на котором выполнены гладкие дорожки качения, и установлена функциональная плита-вставка из магнитомягкого материала, на которой сформирована зубцовая структура, лежащая в одной плоскости с гладкими дорожками качения якорь установлен на функциональной плите-вставке статора посредством четырех сферических опор качения с горизонтальными осями вращения,обеспечивающих перемещение якоря по гладким дорожкам качения корпуса статора с зазором между зубцовыми структурами статора и ротора в пределах от 0,01 до 0,003 мм с колебанием рабочего зазора от его номинального значения не более 0,002 мм, двух сферических опор качения с вертикальными осями вращения, обеспечивающих ориентацию 17600 1 2013.10.30 положения якоря по углу, и прижимного устройства, установленного на боковой поверхности якоря, при этом опоры качения с горизонтальными и вертикальными осями вращения выполнены с осевым эксцентриситетом величиной от 0,05 до 0,15 мм и радиусом сферической поверхности опор от 7 до 15 мм. Изобретение относится к электротехнике, а именно к линейным шаговым электродвигателям, и может быть использовано для прецизионного перемещения различных объектов и инструментов. Известны механизмы шагового перемещения, содержащие неподвижное ферромагнитное зубцовое основание с взаимно-перпендикулярными пазами на поверхности, образующими систему зубцов-выступов кубической формы, и подвижные каретки с зубцовымими П-образными магнитопроводами и фазными обмотками управления 1. Недостатком подобной конструкции является то, что из-за наличия взаимноперпендикулярных пазов на поверхности ферромагнитного основания происходит потеря сил тяги, так как уменьшается площадь зубцовой структуры ферромагнитного основания,контактирующая с зубчатыми магнитопроводами каретки не менее чем на 50 , в результате происходит уменьшение на такую же величину мощности электродвигателя. Наиболее близким по технической сущности к предлагаемому изобретению является линейный шаговый электродвигатель 2. Линейный шаговый электродвигатель содержит статор с зубцовой нарезкой, якорь с магнитопроводом и обмотками управления, направляющую, которая представляет собой жестко закрепленную на якоре магнитную плиту с постоянными магнитами, контактирующую с боковой поверхностью статора. Недостатком подобной конструкции является то,что при жестком закреплении направляющей, несмотря на предъявляемые высокие требования как к механической обработке деталей, так и к сборке, возникает угловой разворот направляющей относительно зубцовой структуры якоря, что приводит к несовпадению по углу зубцовой структуры статора и якоря. При этом угловой разворот зубцовой структуры статора относительно якоря невозможно устранить, что приводит к нарушению масштаба перемещения и потере точностных параметров электродвигателя, а также из-за неполного взаимодействия зубцовых структур статора и якоря - к потере сил тяги. Дополнительно к этому при стыковке магнитной плиты и якоря для создания двух стыкующихся между собой взаимно-перпендикулярных поверхностей с двугранными углами требуется высокая точность изготовления и сборки двух взаимно-перпендикулярных двугранных углов. Задачей предлагаемого изобретения является повышение точностных и динамических характеристик электродвигателя при упрощении конструкции и технологии изготовления. Задача решается тем, что в одноосевом линейном шаговом электродвигателе, содержащем якорь, включающий электромагнитные фазные модули, каждый из которых содержит два П-образных магнитопровода с зубцовой структурой на полюсах и постоянным магнитом между ними, и фазную обмотку управления, статор с зубцовой структурой, статор содержит стальной корпус, выполненный в виде параллелепипеда, на котором выполнены гладкие дорожки качения и установлена функциональная плита-вставка из магнитомягкого материала, на которой сформирована зубцовая структура, лежащая в одной плоскости с гладкими дорожками качения, якорь установлен на функциональной плите-вставке статора посредством четырех сферических опор качения с горизонтальными осями вращения,обеспечивающих перемещение якоря по гладким дорожкам качения корпуса статора с зазором между зубцовыми структурами статора и ротора в пределах от 0,01 до 0,03 мм с колебанием рабочего зазора от его номинального значения не более 0,002 мм, двух сферических опор качения с вертикальными осями вращения, обеспечивающих ориентацию положения якоря по углу, и прижимного устройства, установленного на боковой поверхности якоря, при этом опоры качения с горизонтальными и вертикальными осями 2 17600 1 2013.10.30 вращения выполнены с осевым эксцентриситетом величиной от 0,05 до 0,15 мм и радиусом сферической поверхности опор от 7 до 15 мм. Суть изобретения поясняется фигурами, где на фиг. 1 изображен общий вид устройства сверху на фиг. 2 - фронтальная проекция общего вида на фиг. 3 - разрез по А-А на фиг. 4 - разрез по Д-Д. Одноосевой линейный шаговый электродвигатель (фиг. 1-2) состоит из якоря 1, расположенного в немагнитном корпусе и содержащего электромагнитные фазные модули 2,снабженные двумя П-образными магнитопроводами 3 (фиг. 4) с зубцовой структурой на полюсах, постоянными магнитами 4 между ними и фазными обмотками управления 5,статора 6, который выполнен в виде параллелепипеда из стали с функциональной плитойвставкой из магнитомягкого материала 7, на которой сформирована зубцовая структура и которая лежит в одной плоскости с гладкими дорожками качения Б, выполненными на твердой поверхности стального корпуса статора 6, четырех опор 8 с горизонтальными осями вращения (фиг. 2-3) и двух опор 13 с вертикальными осями вращения (фиг. 3-4),которые имеют эксцентриситетот 0,05 до 0,15 мм, и снабжены сферическими бандажами 9 с радиусом сферы от 7 до 15 мм, подшипниками 12, и имеют на торцах отверстия с внутренним шестигранником, предназначенные для их юстировочного поворота вокруг оси и прижимного устройства (фиг. 1-2). Опоры с горизонтальными осями 8 (фиг. 2-3) предназначены для перемещения якоря 1 по дорожкам Б статора 6 с зазороммежду функциональными поверхностями якоря и статора, диапазон величины которого лежит в пределах от 0,01 до 0,03 мм и имеет разноразмерность величины номинального значения не более 0,002 мм, в состав опор с горизонтальными осями 8 входят втулки 10 и стопорные гайки 11. Опоры с вертикальными осями 13 (фиг. 3-4) предназначены для ориентации положения якоря по углу за счет того, что опоры посредством бандажей 9 соприкасаются с плоскостьюстатора, которая перпендикулярна плоскостям Б и зубцам зубцовой структуры статора, в результате чего при перемещении якоря 1 по статору 6 сохраняется направление, при котором зубцовая структура статора и якоря параллельны. В состав опор с вертикальными осями входят втулки 20 и гайки 21, стопорный винт 22. Прижимное устройство содержит корпус 14 (фиг. 1-3), который жестко закреплен на боковой поверхности якоря 1 и который через ось 15 и подшипники 12 соединен с рычагом 16, содержащим посредством оси 18 и подшипника 12 закрепленный на нем прижимной ролик 17, который соприкасается с поверхностью Г статора (фиг. 3) через рычаг 16 и пружину 19, создавая силовое замыкание между якорем и статором. Устройство работает следующим образом. Перемещение якоря 1 осуществляется за счет электромагнитных сил тяги , возникающих в зубцовых структурах П-образных магнитопроводов 3 (фиг. 1, 4) при коммутации фазных обмоток управления 5 электромагнитных фазных модулей движения 2,горизонтальные составляющие которых , направленные перпендикулярно нарезке зубцовой структуры статора, стремятся сдвинуть якорь вдоль поверхности статора,(где- суммарная сила тяги одного модуля,- количество модулей), а нормальная сила- прижать к нему. Якорь перемещается на четырех эксцентричных опорах с горизонтальными осями 8,снабженных сферическими бандажами 9, которые регулируются по высоте, а две эксцентричные опоры 13 с вертикальными осями, также снабженные сферическими бандажами 9,имеют возможность регулировать положение якоря по углу для выставления параллельности зубцовой структуры якоря относительно зубцовой структуры статора и с помощью прижимного устройства удерживают якорь от бокового смещения и разворота. 17600 1 2013.10.30 Перед установкой якоря 1 на статор 6 (фиг. 1 и фиг. 2) снимают пружину поз. 19 и вы 1 ставляют эксцентриситетна двух опорах 13 (фиг. 3) так, чтобы он был равен , а 2 верхние точки бандажей 9 опор 8 были выше зубцовой поверхности якоря для того, чтобы в процессе установки не повредить зубцовую поверхность статора и якоря. После установки якоря на статор поворачивают эксцентрики горизонтальных опор 8 до касания зубцовой поверхностью магнитопровода якоря 1 зубцовой поверхности статора 6, то есть убирают зазормежду якорем и статором до нуля, после чего поворачивают эксцентрики четырех опор с горизонтальными осями и устанавливают зазор 0,01 мм с разноразмерностью по всей поверхности якоря не более 0,002 мм. Затем якорь прижимают к статору так, чтобы бандажи 9 опор 13 касались поверхностистатора (фиг. 3), и запитывают обмотки 5 (фиг. 4) электромагнитных фазных модулей 2 током такого направления, при котором на полюсах 1 П-образных магнитопроводов 3 генерирующийся магнитный поток управления Фр и магнитный поток Фм постоянных магнитов 4 складываются(Ф 1 ФмФр), а на полюсах а 2 они вычитаются (Ф 2 Фм - Фр). При Ф 12 Фм, а Ф 20 за счет создавшейся большей плотности магнитного потока Ф 1 происходит смещение якоря вдоль статора с угловым разворотом, в результате чего зубцовая структура якоря устанавливается напротив зубцовой структуры статора и происходит фиксация зубцов на полюсах П-образных магнитопроводов 3 якоря с зубцами статора, при этом направление зубцовой структуры электромагнитных модулей якоря совпадает с направлением зубцовой структуры статора по углу с нулевой погрешностью, а угловой разворот якоря относительно статора, образовавшийся при электромагнитном совмещении зубцовых структур якоря и статора, приводит к тому, что один бандаж 9 опоры 13 касается поверхностистатора, а второй - нет. Для устранения зазора между бандажом 9 и поверхностьюстатора поворачивают второй эксцентрик опоры 13 до касания его бандажом 9 поверхностистатора, при этом якорь, удерживаемый магнитным потоком Ф 1,остается в положении фиксации без смещения, в результате чего сохраняется создавшееся совмещенное положение зубцовых структур якоря и статора по углу с нулевой погрешностью. После чего опоры 13 фиксируют стопорными винтами 22, подтягивают гайки 21 и натягивают замыкающую пружину 19 прижимного устройства. Затем поворачивают эксцентрики четырех опор 8, устанавливая такой зазорв пределах от 0,01 до 0,03 мм с разноразмерностью по всей поверхности якоря не более 0,002 мм, при котором линейный шаговый электродвигатель будет иметь наибольший статический синхронизирующий момент и наибольшее ускорение, определяемые системой управления, и производят фиксацию опор 8. Таким образом, благодаря вертикальным эксцентричным опорам 13, установленным в корпусе якоря, решен вопрос по электромагнитному совмещению зубцовой структуры якоря и статора по углу, что приводит к устранению нарушений погрешностей изготовления, а также масштаба по шагу между зубцовыми структурами якоря и статора, в результате чего ликвидируется накопленная погрешность шага при перемещении якоря по статору на всей длине и повышаются точностные и динамические характеристики двигателя, не прибегая к высоким требованиям механической обработки и сборки, так как применяются детали вращения, технология изготовления которых наиболее проста, причем в конструкции якоря отсутствуют прецизионные двугранные углы, требующие трудоемкой механической обработки. Применение четырех эксцентричных опор 8 в горизонтальной плоскости между зубцовыми поверхностями якоря и статора позволяет устанавливать любой необходимый контролируемый по величине стабильный зазор , разноразмерность которого при перемещении якоря по всей поверхности статора не превышает 0,002 мм, что при применении пневматической системы выполнить невозможно из-за не жесткости воздушной подушки и неравномерности истечения воздушных струй из жиклеров, так как величина зазора получается с большими допусками (более 0,005 мм). 4 17600 1 2013.10.30 Минимальный рабочий зазор между зубцовыми поверхностями якоря и статора, а также точное совмещение зубцовой структуры якоря и статора по углу значительно повышают точностные и динамические характеристики двигателя, причем технологический процесс производства упрощается благодаря применению сферических опор, которые компенсируют угловые перекосы, и за счет устранения прецизионных двугранных углов в конструкции якоря, которые обязательно необходимы в устройствах на пневмоопорах, так как воздух в пневмоопорах начинает вибрировать, а якорь заводится даже при наличии минимальной неперпендикулярности, полученной при изготовлении направляющей и ее жестком креплении к якорю. Выставление рабочих зазоров между статором и якорем за счет поворота эксцентричных опор контролируется известными промышленными приборами. Источники информации 1. Патент 2376, МПК 02 41/03, 1996. 2. Патент 1359865, МПК 02 41/02, 1987 (прототип). Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 5
МПК / Метки
МПК: H02K 41/03
Метки: одноосевой, линейный, шаговый, электродвигатель
Код ссылки
<a href="https://by.patents.su/5-17600-odnoosevojj-linejjnyjj-shagovyjj-elektrodvigatel.html" rel="bookmark" title="База патентов Беларуси">Одноосевой линейный шаговый электродвигатель</a>
Линейный шаговый магнитоэлектрический двигатель
Номер патента: 2956
Опубликовано: 30.09.1999
Авторы: Трусов Алексей Николаевич, Трусов Николай Калистратович, Жарский Владимир Владимирович, Сидорук Сергей Николаевич
МПК: H02K 41/03
Метки: двигатель, шаговый, линейный, магнитоэлектрический
Текст:
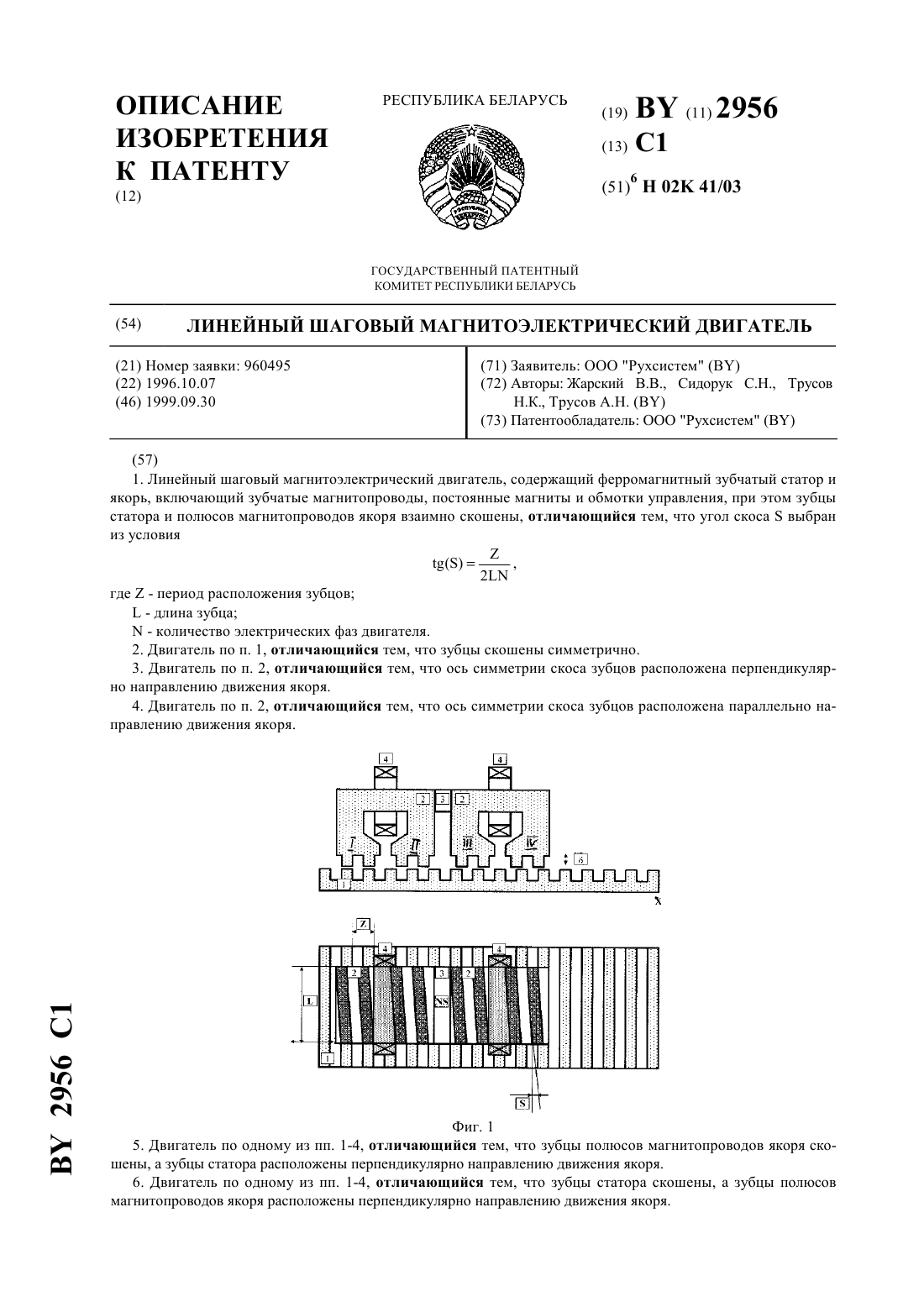
...ось симметрии скоса зубцов которого расположена перпендикулярно направлению движения на фиг. 5 - изображен якорь, ось симметрии скоса зубцов которого расположена параллельно направлению движения. Линейный шаговый магнитоэлектрический двигатель содержит ферромагнитный зубчатый статор 1 и якорь, состоящий из магнитопровода 2, постоянного магнита 3 и обмоток управления 4, на полюсах магнитопровода 2 якоря, как и на статоре 1, расположены...
Многофазный линейный шаговый магнитоэлектрический двигатель
Номер патента: 2882
Опубликовано: 30.06.1999
Авторы: Трусов Алексей Николаевич, Сидорук Сергей Николаевич, Трусов Николай Калистратович
МПК: H02K 41/03
Метки: магнитоэлектрический, шаговый, двигатель, многофазный, линейный
Текст:
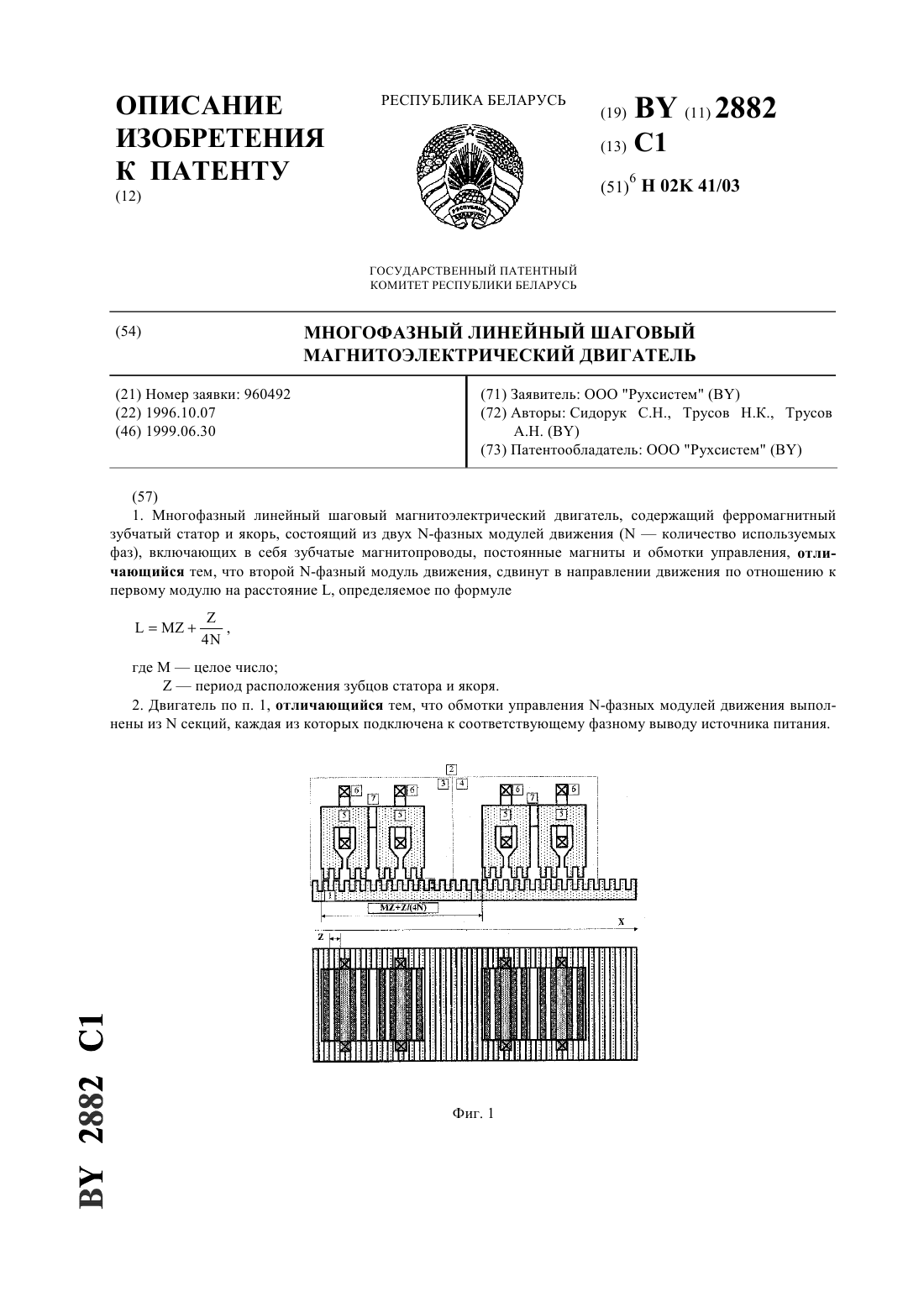
...фазному выводу источника питания, причем количество витков 1 в основной и 2- в дополнительных секциях каждого из модулей выбраны из соотношений На фиг. 1 показана принципиальная схема якоря многофазного линейного шаговою магнитоэлектрического двигателя, на фиг. 2, в качестве примера, векторные диаграммы м.д.с. фазных обмоток для двухфазного и на фиг. 3 для трехфазного двигателей, на фиг. 4 приведена схема соединения секций...
Двухкоординатный линейный шаговый двигатель с совмещенными координатами
Номер патента: 4657
Опубликовано: 30.09.2002
Авторы: Лозовский Валерий Иванович, Трусов Николай Калистратович, Булацкий Геннадий Николаевич, Жарский Владимир Владимирович
МПК: H02K 41/03, H02K 41/02
Метки: двухкоординатный, шаговый, совмещенными, координатами, двигатель, линейный
Текст:
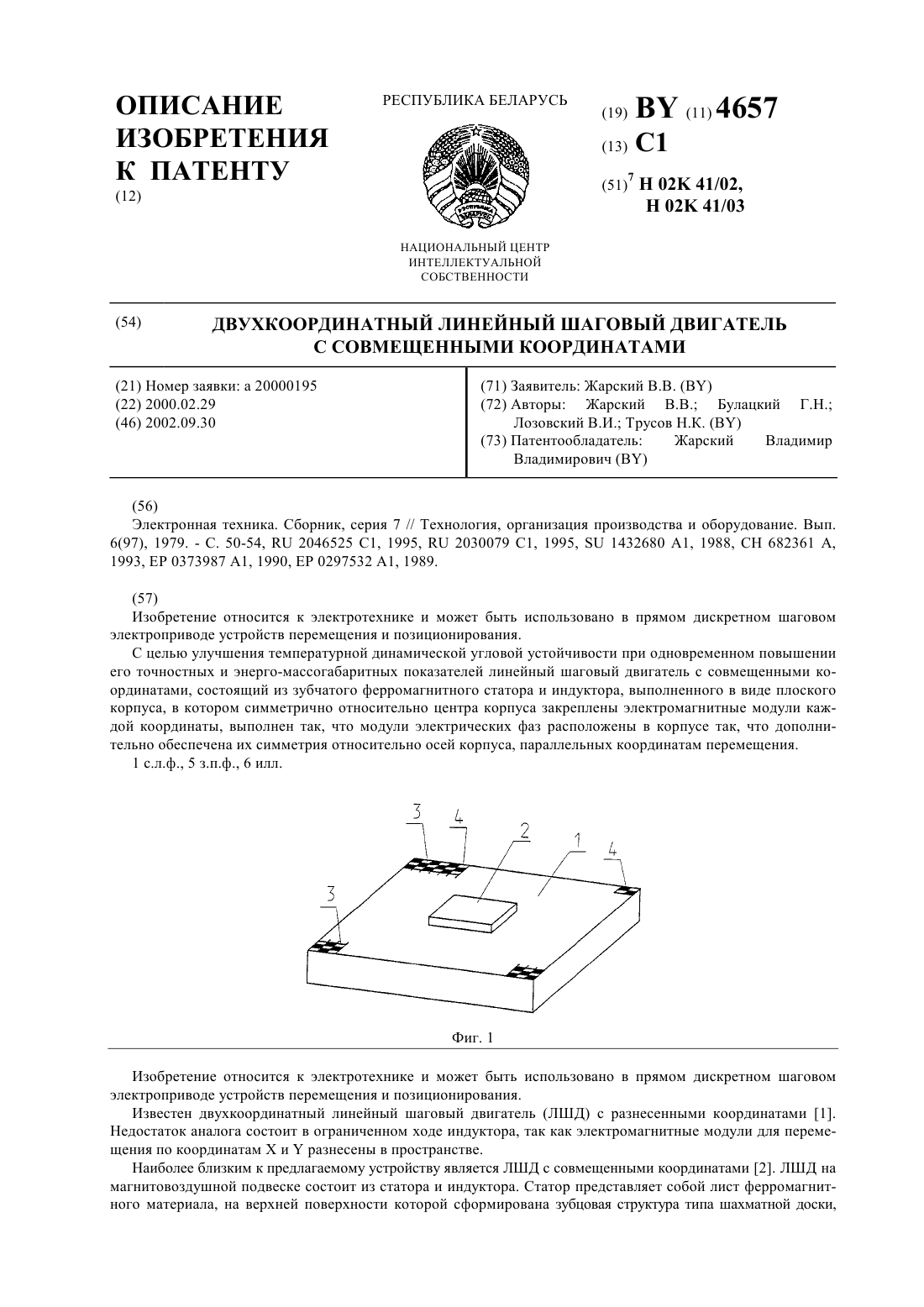
...ширине его стержня, у двухфазного модуля (фиг. 6 а) расход меди примерно в два раза больше чем у однофазного (фиг. 6 в). Расположение обмотки 7 в окне и на спинке магнитопровода приводит к увеличению высоты 2-фазного модуля по сравнению с однофазным. Следовательно, при одинаковой амплитуде тягового усилия индуктор ЛШД на двухфазных модулях будет иметь большую массу, большие габариты, чем на однофазных. Омическое сопротивление фазы...
Линейный синхронный стержневой мотор
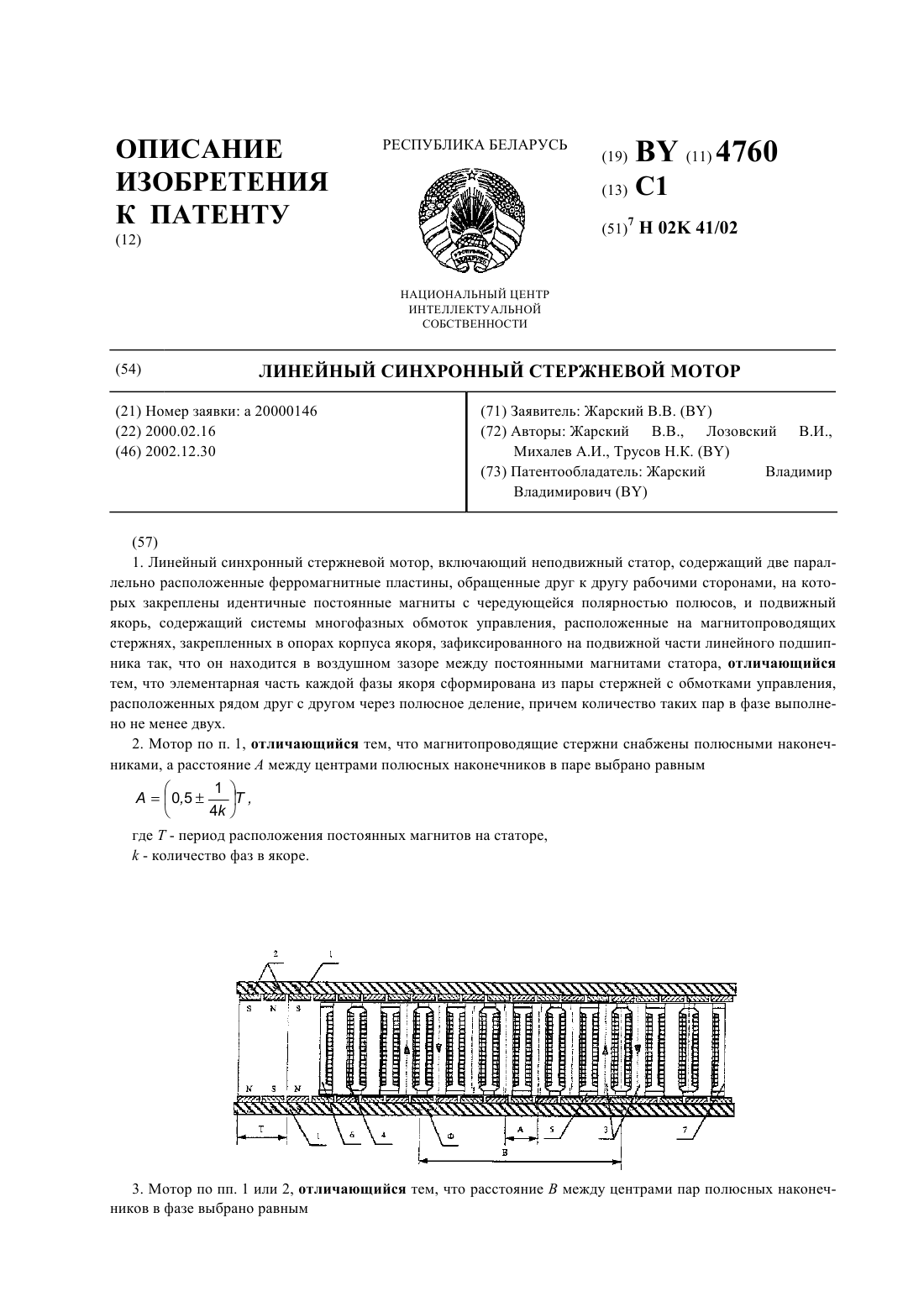
Номер патента: 4760
Опубликовано: 30.12.2002
Авторы: Михалев Александр Иванович, Лозовский Валерий Иванович, Трусов Николай Калистратович, Жарский Владимир Владимирович
МПК: H02K 41/02
Метки: синхронный, линейный, стержневой, мотор
Текст:
...части линейного подшипника так,что он находится в воздушном зазоре между постоянными магнитами статора, элементарная часть каждой фазы мотора сформирована из пары стержней с обмотками управления, расположенных рядом друг с другом через полюсное деление, причем количество таких пар в фазе выполнено не менее двух. Магнитопроводящие стержни снабжены полюсными наконечниками, а расстояние А между центрами полюсных наконечников в паре выбрано...
Линейный синхронный мотор
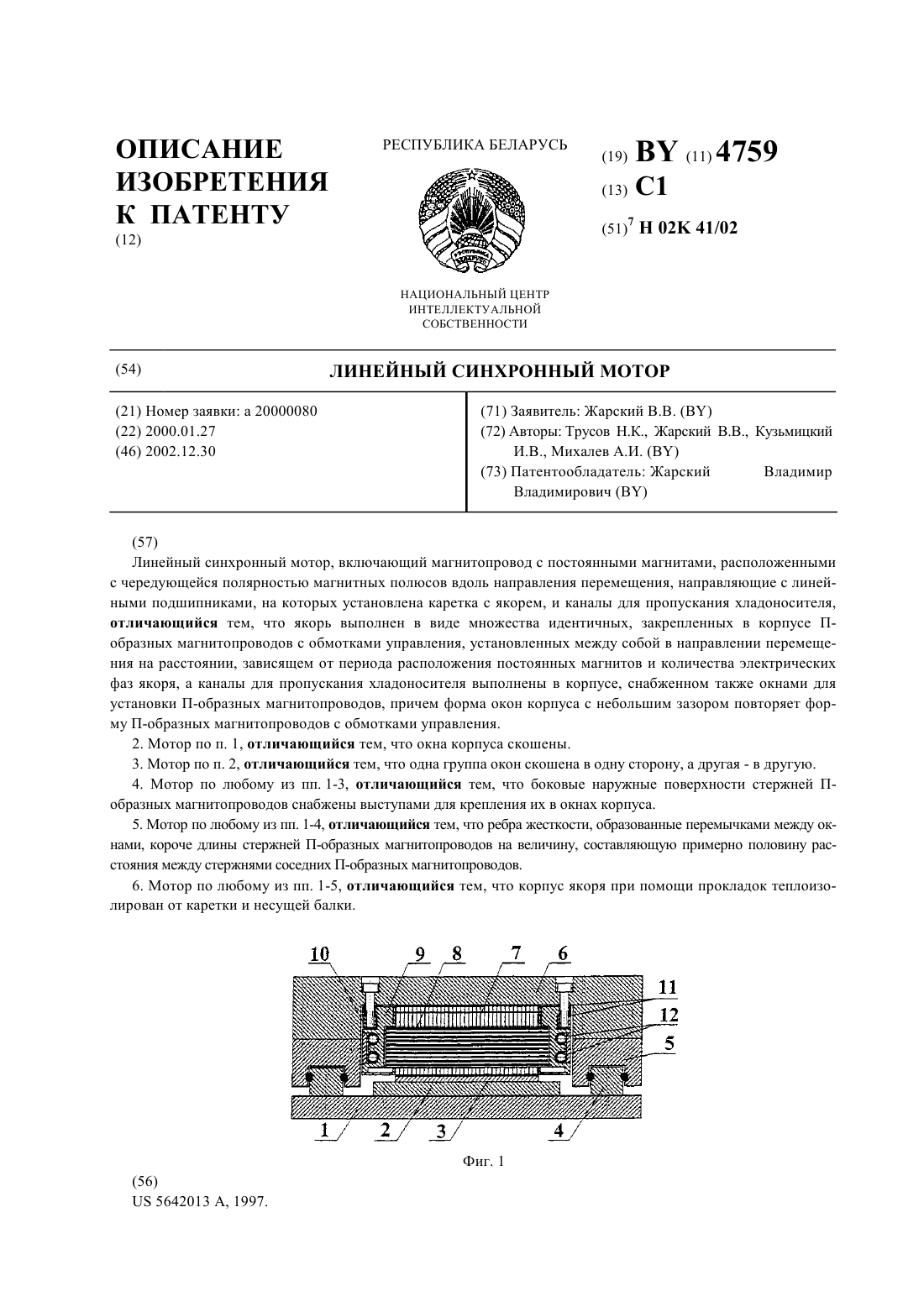
Номер патента: 4759
Опубликовано: 30.12.2002
Авторы: Кузьмицкий Игорь Викторович, Трусов Николай Калистратович, Жарский Владимир Владимирович, Михалев Александр Иванович
МПК: H02K 41/02
Метки: синхронный, мотор, линейный
Текст:
...каналы для пропускания хладоносителя выполнены в корпусе. В корпусе якоря имеются окна для установки Побразных магнитопроводов, причем форма окон корпуса с небольшим зазором повторяет форму П-образных магнитопроводов с обмотками управления. Боковые наружные поверхности стержней П-образных магнитопроводов снабжены выступами для крепления их в окнах корпуса. Корпус якоря теплоизолирован и механически развязан от каретки так, чтобы тепловое...
Предыдущий патент: Предохранительный клапан
Следующий патент: Способ дифференциальной диагностики нейробластомы надпочечника и нефробластомы
Случайный патент: Способ лечения хронического фарингита