Устройство быстрого обзора по разности времен запаздывания в корреляционно-базовых комплексах пассивной локации
Номер патента: U 9543
Опубликовано: 30.10.2013
Авторы: Дмитренко Алесь Александрович, Седышев Сергей Юрьевич, Горшков Сергей Анатольевич
Текст
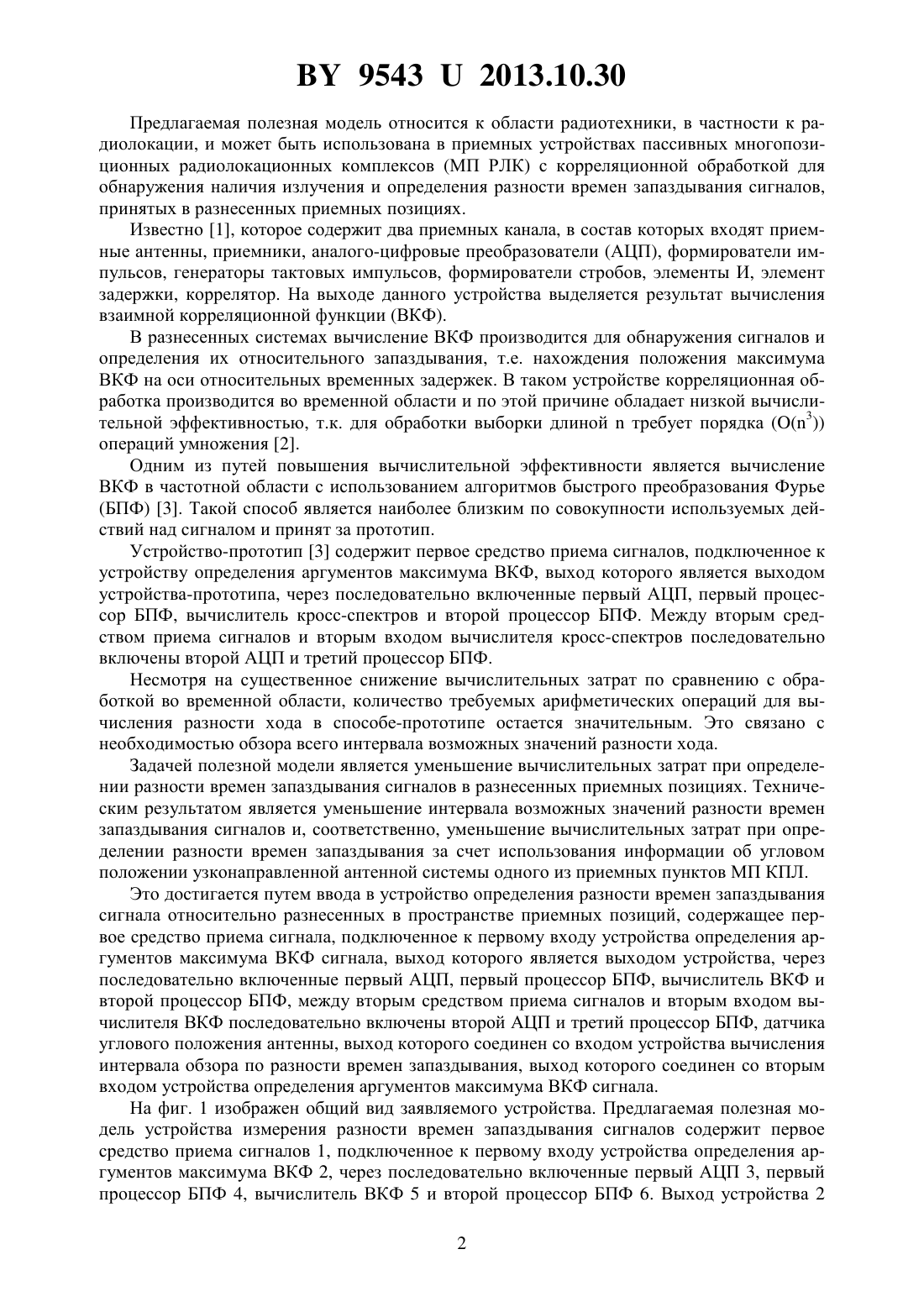
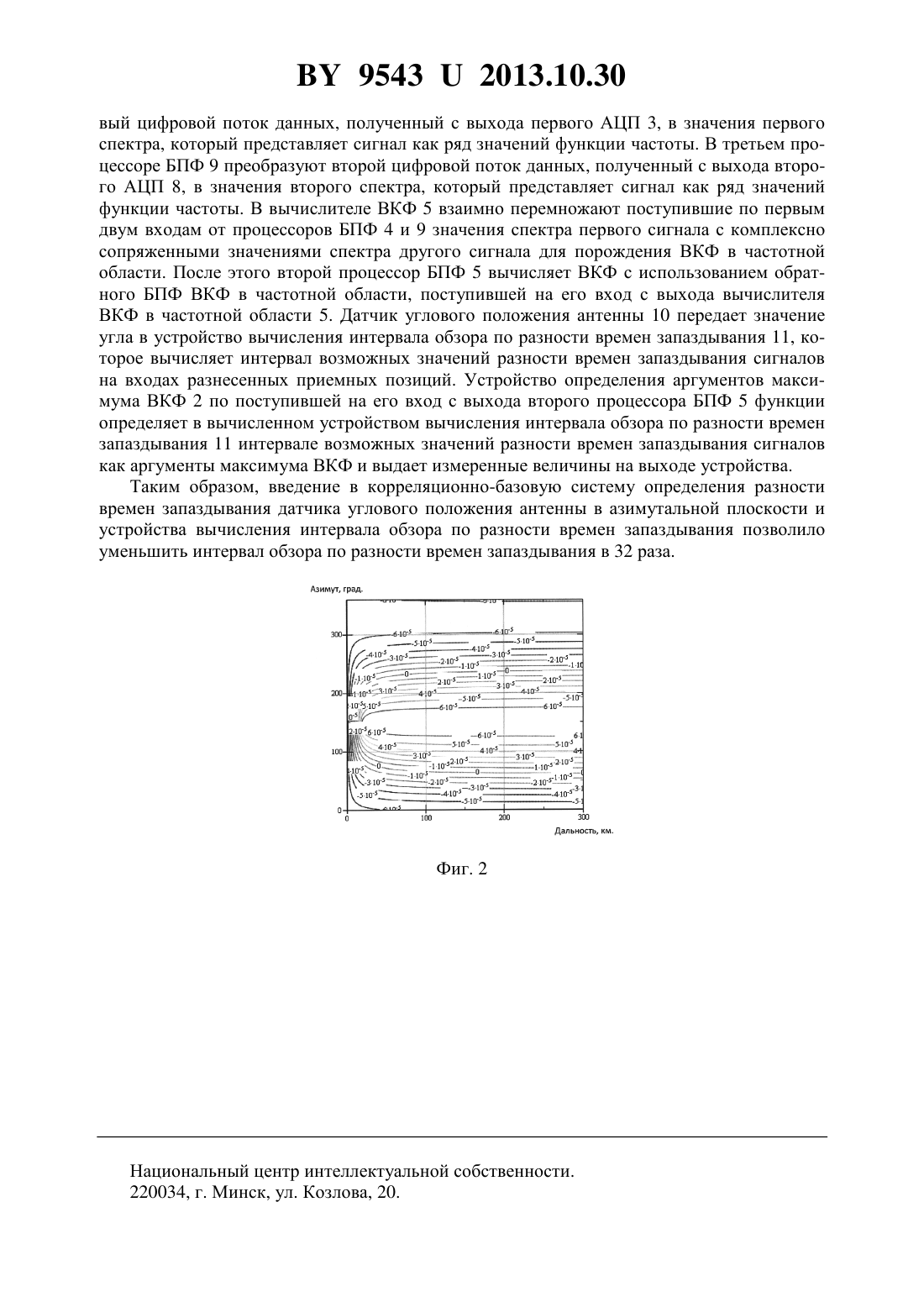
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО БЫСТРОГО ОБЗОРА ПО РАЗНОСТИ ВРЕМЕН ЗАПАЗДЫВАНИЯ В КОРРЕЛЯЦИОННО-БАЗОВЫХ КОМПЛЕКСАХ ПАССИВНОЙ ЛОКАЦИИ(71) Заявитель Учреждение образования Военная академия Республики Беларусь(72) Авторы Горшков Сергей Анатольевич Седышев Сергей Юрьевич Дмитренко Алесь Александрович(73) Патентообладатель Учреждение образования Военная академия Республики Беларусь(57) Устройство быстрого обзора по разности времен запаздывания в корреляционнобазовых комплексах пассивной локации, содержащее первое средство приема сигнала,подключенное к первому входу устройства определения аргументов максимума взаимной корреляционной функции сигнала, выход которого является выходом устройства, через последовательно включенные первый аналого-цифровой преобразователь, первый процессор быстрого преобразования Фурье, вычислитель взаимной корреляционной функции и второй процессор быстрого преобразования Фурье, между вторым средством приема сигналов и вторым входом вычислителя взаимной корреляционной функции последовательно включены второй аналого-цифровой преобразователь и третий процессор быстрого преобразования Фурье, отличающееся тем, что в него включены датчик углового положения антенны, устройство вычисления интервала обзора по разности времен запаздывания выход датчика углового положения антенны соединен со входом устройства вычисления интервала обзора по разности времен запаздывания, выход которого соединен со вторым входом устройства определения аргументов максимума взаимной корреляционной функции сигнала. 95432013.10.30 Предлагаемая полезная модель относится к области радиотехники, в частности к радиолокации, и может быть использована в приемных устройствах пассивных многопозиционных радиолокационных комплексов (МП РЛК) с корреляционной обработкой для обнаружения наличия излучения и определения разности времен запаздывания сигналов,принятых в разнесенных приемных позициях. Известно 1, которое содержит два приемных канала, в состав которых входят приемные антенны, приемники, аналого-цифровые преобразователи (АЦП), формирователи импульсов, генераторы тактовых импульсов, формирователи стробов, элементы И, элемент задержки, коррелятор. На выходе данного устройства выделяется результат вычисления взаимной корреляционной функции (ВКФ). В разнесенных системах вычисление ВКФ производится для обнаружения сигналов и определения их относительного запаздывания, т.е. нахождения положения максимума ВКФ на оси относительных временных задержек. В таком устройстве корреляционная обработка производится во временной области и по этой причине обладает низкой вычислительной эффективностью, т.к. для обработки выборки длинойтребует порядка 3 операций умножения 2. Одним из путей повышения вычислительной эффективности является вычисление ВКФ в частотной области с использованием алгоритмов быстрого преобразования Фурье(БПФ) 3. Такой способ является наиболее близким по совокупности используемых действий над сигналом и принят за прототип. Устройство-прототип 3 содержит первое средство приема сигналов, подключенное к устройству определения аргументов максимума ВКФ, выход которого является выходом устройства-прототипа, через последовательно включенные первый АЦП, первый процессор БПФ, вычислитель кросс-спектров и второй процессор БПФ. Между вторым средством приема сигналов и вторым входом вычислителя кросс-спектров последовательно включены второй АЦП и третий процессор БПФ. Несмотря на существенное снижение вычислительных затрат по сравнению с обработкой во временной области, количество требуемых арифметических операций для вычисления разности хода в способе-прототипе остается значительным. Это связано с необходимостью обзора всего интервала возможных значений разности хода. Задачей полезной модели является уменьшение вычислительных затрат при определении разности времен запаздывания сигналов в разнесенных приемных позициях. Техническим результатом является уменьшение интервала возможных значений разности времен запаздывания сигналов и, соответственно, уменьшение вычислительных затрат при определении разности времен запаздывания за счет использования информации об угловом положении узконаправленной антенной системы одного из приемных пунктов МП КПЛ. Это достигается путем ввода в устройство определения разности времен запаздывания сигнала относительно разнесенных в пространстве приемных позиций, содержащее первое средство приема сигнала, подключенное к первому входу устройства определения аргументов максимума ВКФ сигнала, выход которого является выходом устройства, через последовательно включенные первый АЦП, первый процессор БПФ, вычислитель ВКФ и второй процессор БПФ, между вторым средством приема сигналов и вторым входом вычислителя ВКФ последовательно включены второй АЦП и третий процессор БПФ, датчика углового положения антенны, выход которого соединен со входом устройства вычисления интервала обзора по разности времен запаздывания, выход которого соединен со вторым входом устройства определения аргументов максимума ВКФ сигнала. На фиг. 1 изображен общий вид заявляемого устройства. Предлагаемая полезная модель устройства измерения разности времен запаздывания сигналов содержит первое средство приема сигналов 1, подключенное к первому входу устройства определения аргументов максимума ВКФ 2, через последовательно включенные первый АЦП 3, первый процессор БПФ 4, вычислитель ВКФ 5 и второй процессор БПФ 6. Выход устройства 2 2 95432013.10.30 является выходом устройства измерения. Между вторым средством приема сигналов 7 и вторым входом вычислителя ВКФ 5 последовательно включены второй АЦП 8 и третий процессор БПФ 9. Выход датчика углового положения антенны 10 соединен со входом устройства вычисления интервала обзора по разности времен запаздывания И, выход которого соединен со вторым входом определения аргументов максимума ВКФ сигнала 2. На фиг. 2 показана зависимость разности времен запаздывания от азимута и дальности местонахождения ИРИ для одной пары приемных позиций. Для решения поставленной задачи было выполнено имитационное моделирование устройства с использованием характеристик самолетного ответчика системы государственного опознавания свой-чужой США и стран НАТО длина волны 0,275 м длительность импульса 0710-7 с (тип ЗС - ППРИ) импульсная мощность передатчика 0500 Вт база системы (расстояние между приемными пунктами)20 км коэффициент усиления антенны передатчика самолетного ответчика пер 7 коэффициент усиления узконаправленной антенны пер 30 коэффициент усиления ненаправленной антенны пер 7 . Для определения разности времен запаздывания в классической корреляционнобазовой системе производится обзор всех возможных значений разности времен запаздывания В настоящей модели величина данного интервала составила инт 1,3310-4 с. В предлагаемой полезной модели использовалась узконаправленная антенная система для определения углового направления на ИРИ в азимутальной плоскости. Измерение азимута (при известных значениях базы системы) позволяет оценить возможный интервал значений разности времен запаздывания (фиг. 2) 1(, )222 ,где- текущее положение ДНА,- азимут -го ПП, - расстояние от ЦПП до -го ПП, - текущая дальность, - скорость света,(, ) - разность времен запаздывания комплексных огибающих сигналов ИРИ между ЦПП и -м ПП. Получив данную оценку, можно значительно уменьшить интервал обзора по разности времен запаздывания на выходе устройства вычисления аргументов максимума ВКФ. Уточненный интервал обзора в модели составил инт.ут 3,8410-6 с. Таким образом,интервал обзора по разности времен запаздывания был сокращен в 32 раза. Предлагаемое устройство (фиг. 1) работает следующим образом. На одной из двух разнесенных приемных позиций принимают сигнал первым средством приема сигналов 1,а на другой из двух разнесенных позиций принимают сигнал вторым средством приема сигналов 7. С выхода первого средства приема сигналов 1 принятый сигнал подают на вход первого АЦП 3 и преобразуют сигнал, полученный от одной приемной позиции, в первый цифровой поток данных, который в цифровой форме представляет сигнал как ряд значений функции времени. С выхода второго средства приема сигналов 7 принятый сигнал подают на вход второго АЦП 8 и преобразуют сигнал, полученный от другой приемной позиции, во второй цифровой поток данных, который в цифровой форме представляет сигнал как ряд значений функции времени. В первом процессоре БПФ 4 преобразуют пер 95432013.10.30 вый цифровой поток данных, полученный с выхода первого АЦП 3, в значения первого спектра, который представляет сигнал как ряд значений функции частоты. В третьем процессоре БПФ 9 преобразуют второй цифровой поток данных, полученный с выхода второго АЦП 8, в значения второго спектра, который представляет сигнал как ряд значений функции частоты. В вычислителе ВКФ 5 взаимно перемножают поступившие по первым двум входам от процессоров БПФ 4 и 9 значения спектра первого сигнала с комплексно сопряженными значениями спектра другого сигнала для порождения ВКФ в частотной области. После этого второй процессор БПФ 5 вычисляет ВКФ с использованием обратного БПФ ВКФ в частотной области, поступившей на его вход с выхода вычислителя ВКФ в частотной области 5. Датчик углового положения антенны 10 передает значение угла в устройство вычисления интервала обзора по разности времен запаздывания 11, которое вычисляет интервал возможных значений разности времен запаздывания сигналов на входах разнесенных приемных позиций. Устройство определения аргументов максимума ВКФ 2 по поступившей на его вход с выхода второго процессора БПФ 5 функции определяет в вычисленном устройством вычисления интервала обзора по разности времен запаздывания 11 интервале возможных значений разности времен запаздывания сигналов как аргументы максимума ВКФ и выдает измеренные величины на выходе устройства. Таким образом, введение в корреляционно-базовую систему определения разности времен запаздывания датчика углового положения антенны в азимутальной плоскости и устройства вычисления интервала обзора по разности времен запаздывания позволило уменьшить интервал обзора по разности времен запаздывания в 32 раза. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: G01S 13/52
Метки: пассивной, комплексах, времен, запаздывания, устройство, быстрого, разности, локации, корреляционно-базовых, обзора
Код ссылки
<a href="https://by.patents.su/4-u9543-ustrojjstvo-bystrogo-obzora-po-raznosti-vremen-zapazdyvaniya-v-korrelyacionno-bazovyh-kompleksah-passivnojj-lokacii.html" rel="bookmark" title="База патентов Беларуси">Устройство быстрого обзора по разности времен запаздывания в корреляционно-базовых комплексах пассивной локации</a>
Устройство контроля разности фаз для противоаварийной автоматики энергоситсем
Номер патента: U 4127
Опубликовано: 30.12.2007
Авторы: Баранов Алексей Геннадьевич, Курганов Владимир Васильевич, Крышнев Юрий Викторович
МПК: H02J 9/06
Метки: устройство, фаз, автоматики, разности, энергоситсем, контроля, противоаварийной
Текст:
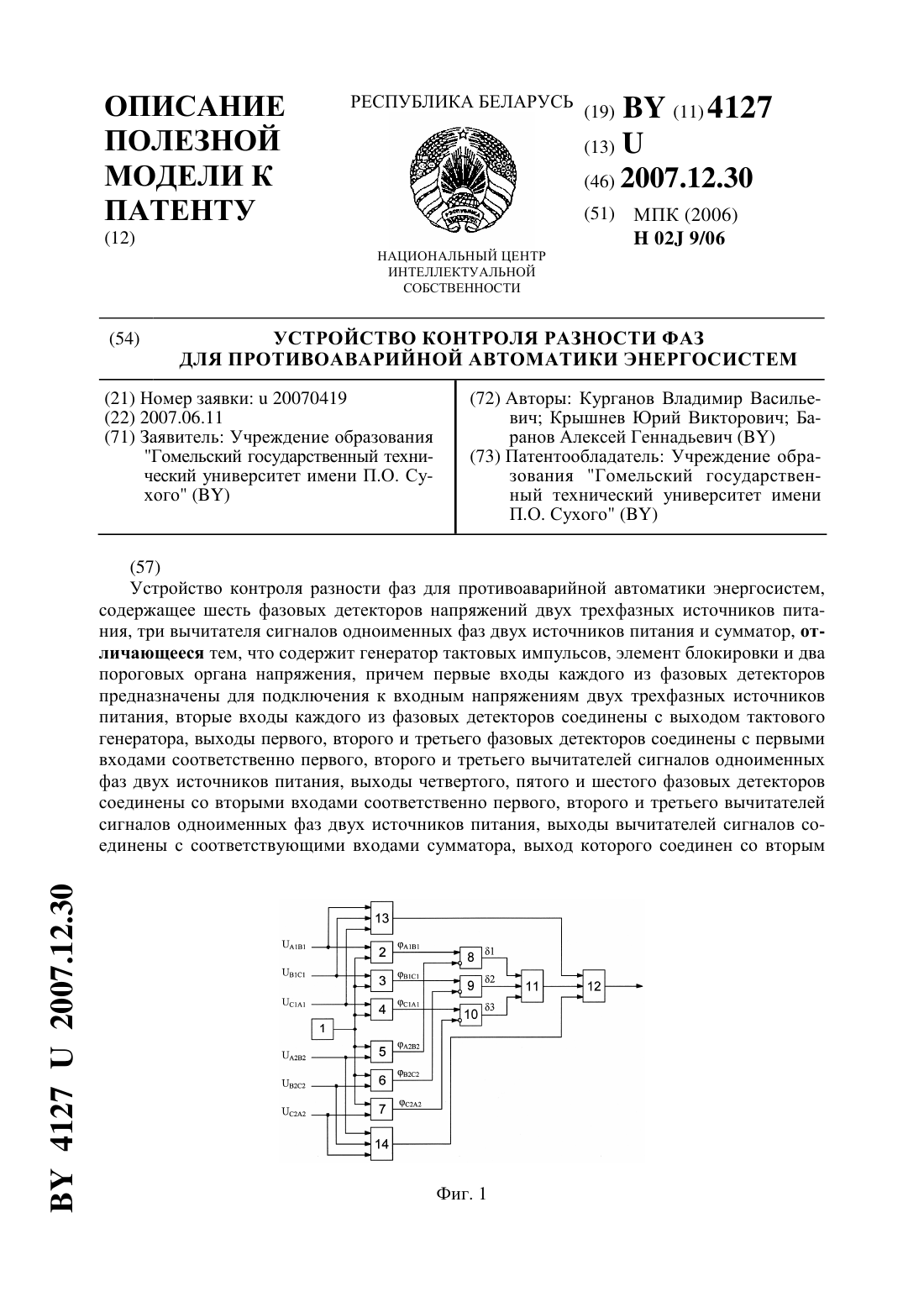
...второго и третьего фазовых детекторов соединены с первыми входами соответственно первого, второго и третьего вычитателей сигналов одноименных фаз двух источников питания, выходы четвертого, пятого и шестого фазовых детекторов соединены со вторыми входами соответственно первого, второго и третьего вычитателей сигналов одноименных фаз двух источников питания, выходы вычитателей сигналов соединены с соответствующими входами сумматора, выход...
Устройство для определения разности потенциалов в полости рта
Номер патента: U 2773
Опубликовано: 30.06.2006
Авторы: Олиферко Дарья Сергеевна, Луцкая Ирина Константиновна
МПК: A61B 5/04
Метки: полости, определения, разности, потенциалов, устройство, рта
Текст:
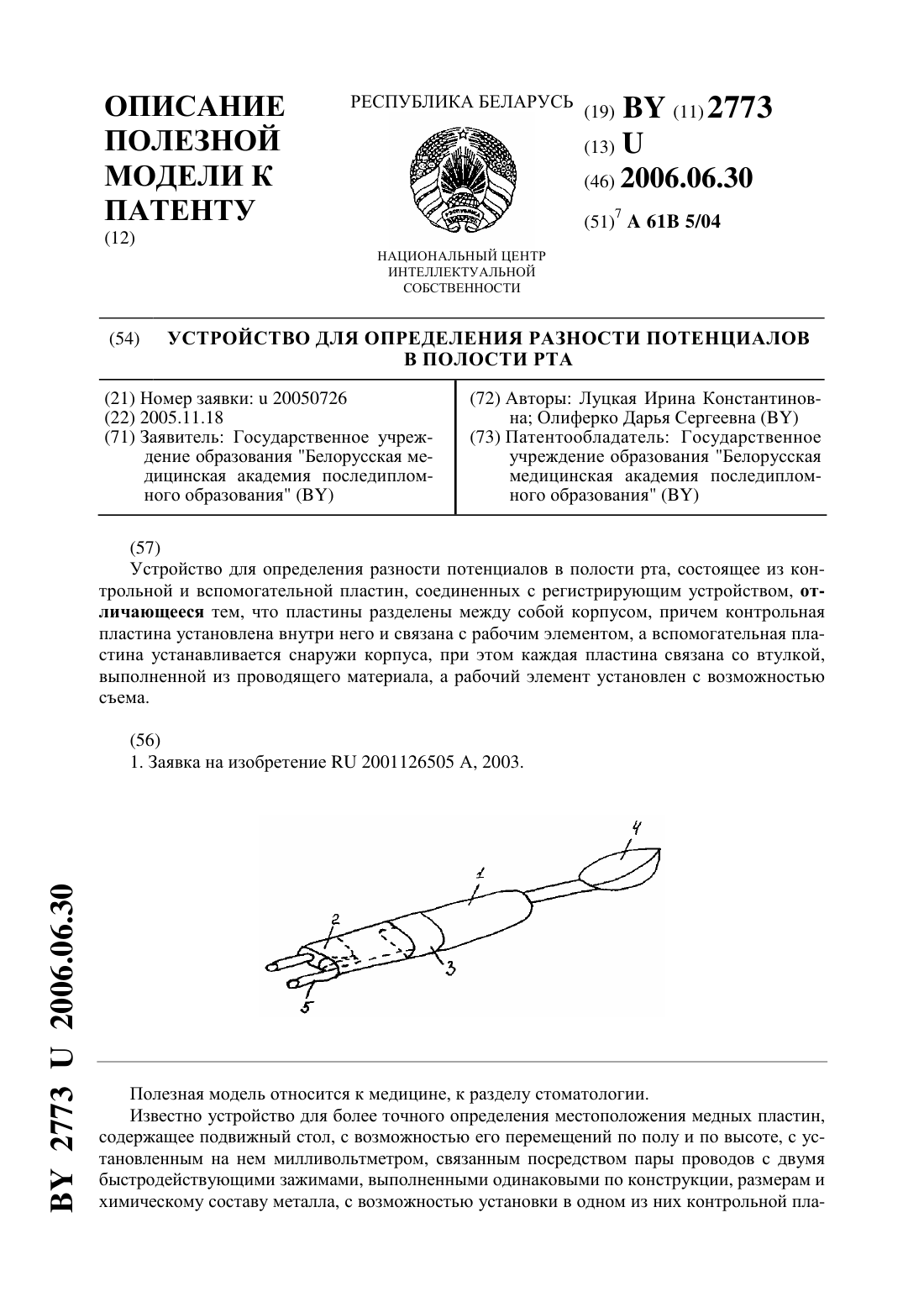
...- вспомогательной пластины, также в разных вариантах исполнения, согласованного с параметрами соответствующих контрольных пластин 1. Недостатком является то, что данное устройство не позволяет точно определить разность потенциалов в полости рта. Задачей полезной модели является определение точного значения разности потенциалов в полости рта. Поставленная задача решается следующим образом. Предложено устройство для определения разности...
Устройство для освещения и обзора пути и окружающей зоны перед транспортным средством
Номер патента: U 4584
Опубликовано: 30.08.2008
Авторы: Круковский Сергей Александрович, Пучковский Илья Николаевич, Петухов Владимир Олегович, Горобец Вадим Анатольевич, Кунцевич Борис Федорович
МПК: G02B 23/00, B60Q 1/02
Метки: средством, освещения, обзора, зоны, пути, транспортным, окружающей, устройство
Текст:
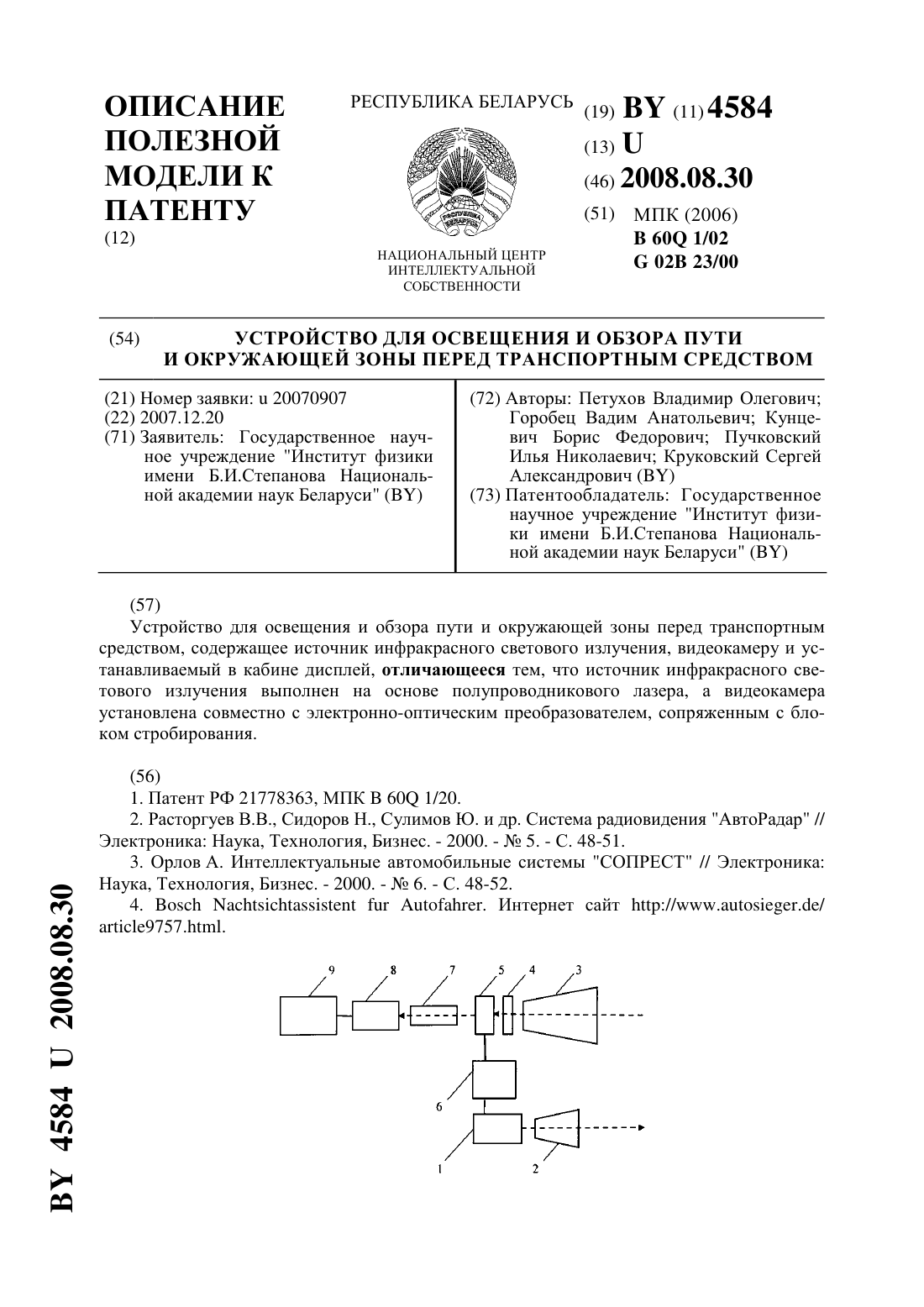
...специального обучения водителей. В экстренных ситуациях это может явиться дополнительным отрицательным фактором при принятии водителем решения в сложной дорожной обстановке, в частности к несогласованным действиям управляющих сигналов системы и водителя. Наиболее близким к полезной модели прототипом представляется устройство 4, состоящее из источника светового пучка на основе встроенных в передние фары автомобиля инфракрасных ламп,...
Устройство для освещения и обзора пути и окружающей зоны перед транспортным средством

Номер патента: U 6034
Опубликовано: 28.02.2010
Авторы: Петухов Владимир Олегович, Пучковский Илья Николаевич, Кунцевич Борис Федорович, Горобец Вадим Анатольевич, Кабанов Владимир Викторович, Сташкевич Сергей Петрович
МПК: B60Q 1/00
Метки: обзора, транспортным, пути, зоны, окружающей, устройство, средством, освещения
Текст:
...до нее в условиях постоянно изменяющейся дорожной обстановки, что не только затрудняет условия обзора, но и отвлекает водителя, понижая степень безопасности вождения. Задача полезной модели состоит в создании устройства для освещения и обзора пути и окружающей зоны перед транспортным средством, позволяющего повысить безопасность движения. Устройство для освещения и обзора пути и окружающей зоны перед транспортным средством содержит источник...
Способ формирования сигнала, пропорционального разности фаз двух исследуемых сигналов
Номер патента: 7940
Опубликовано: 30.04.2006
Автор: Дерюшев Андрей Анатольевич
МПК: H03D 13/00
Метки: фаз, двух, способ, сигналов, разности, исследуемых, пропорционального, сигнала, формирования
Текст:
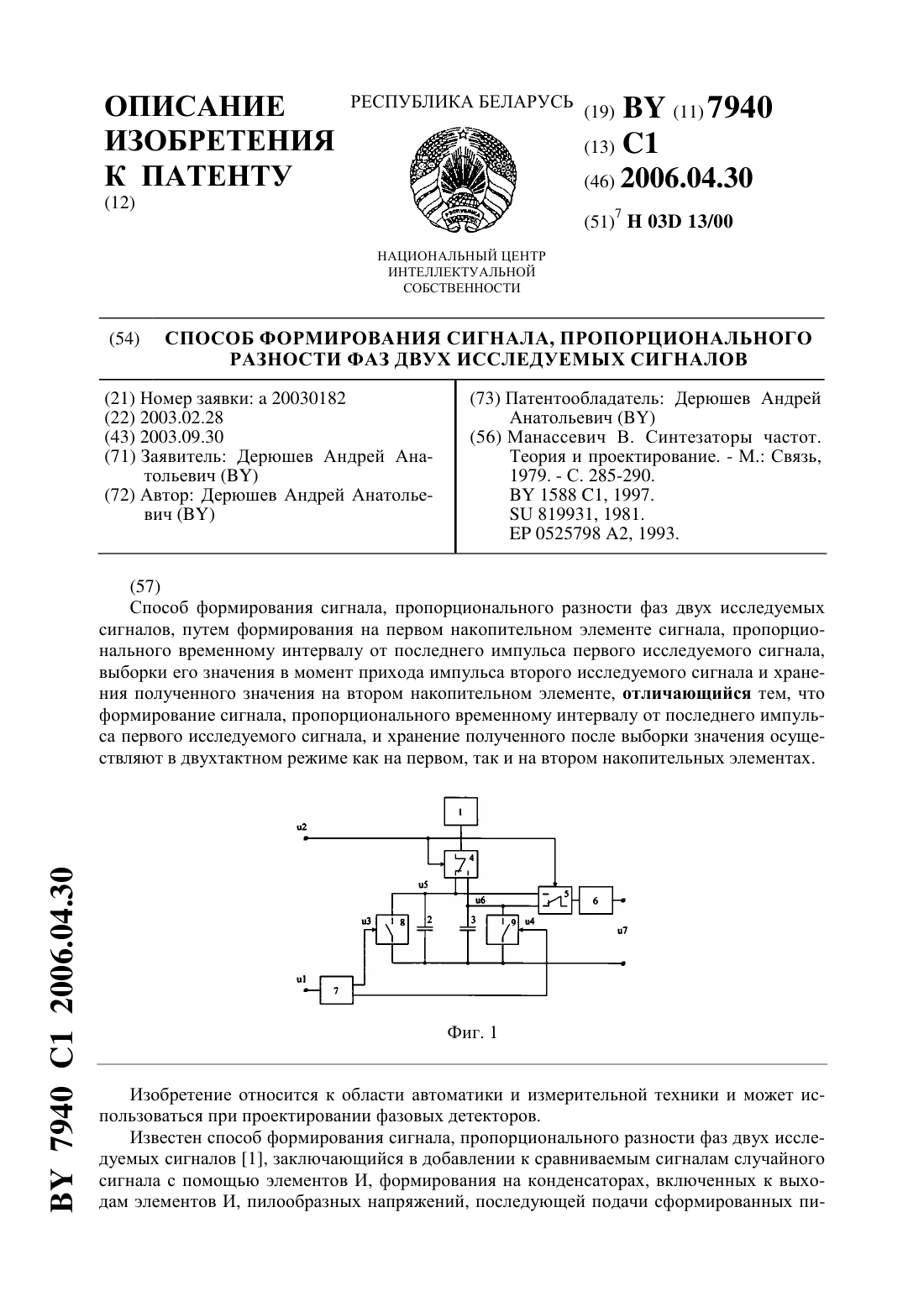
...полученного значения на втором накопительном элементе. Достоинством данного способа является достаточно высокая спектральная чистота получаемого сигнала. Недостатком является принципиальная необходимость заряда второго накопительного элемента до уровня первого накопительного элемента, что, вопервых, вызывает временную задержку формируемого выходного сигнала и ухудшение его спектральных характеристик, во-вторых, вызывает необходимость выбора...
Предыдущий патент: Устройство для моделирования системы связи
Следующий патент: Устройство определения азимута низколетящего вертолета
Случайный патент: Способ формирования излучения для записи контурных голограмм