Устройство для ориентации на трассе мобильных объектов в электромагнитном поле токонесущего проводника
Номер патента: 7362
Опубликовано: 30.09.2005
Авторы: Хлыстова Ирина Григорьевна, Новиков Валерий Александрович
Текст
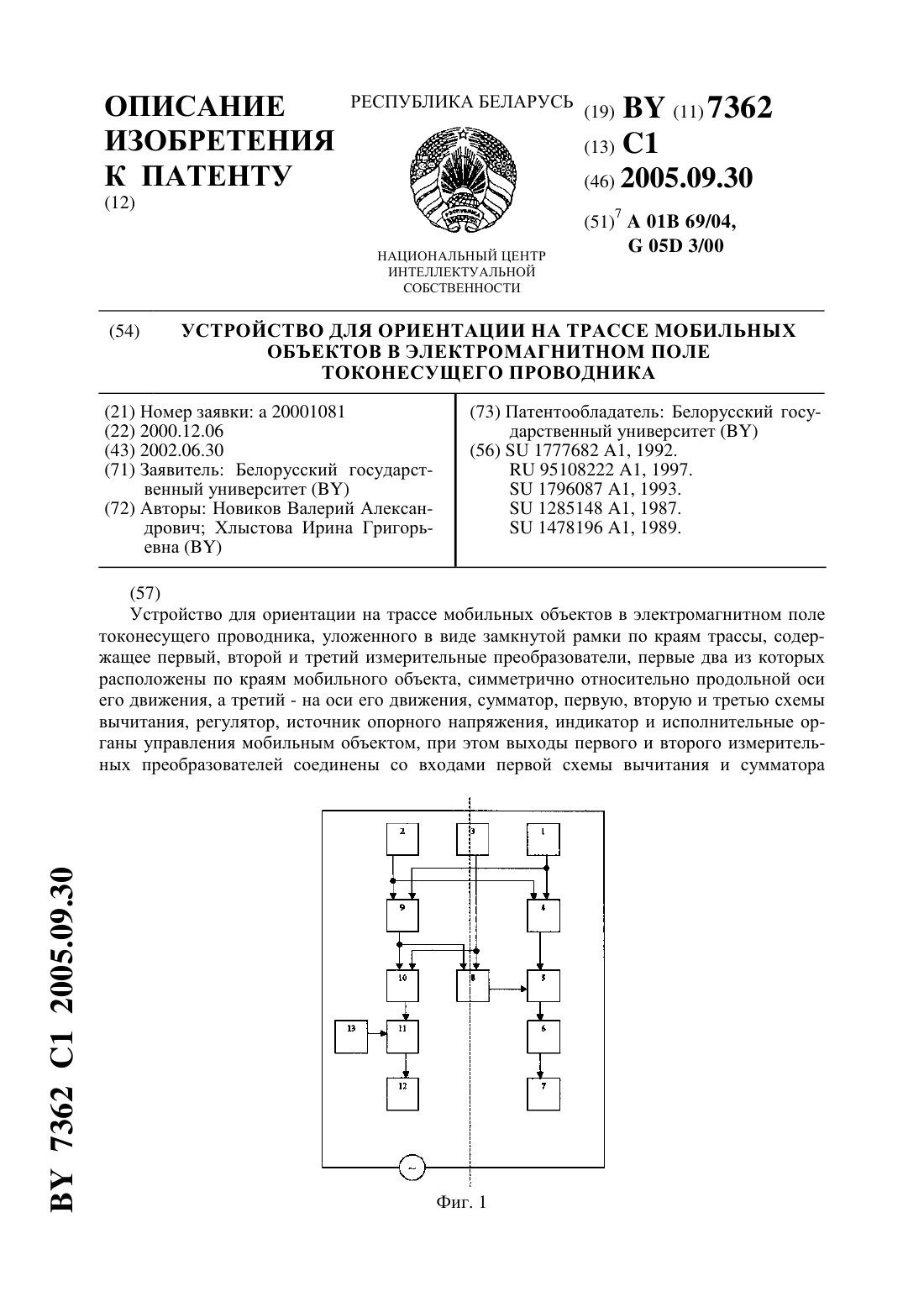
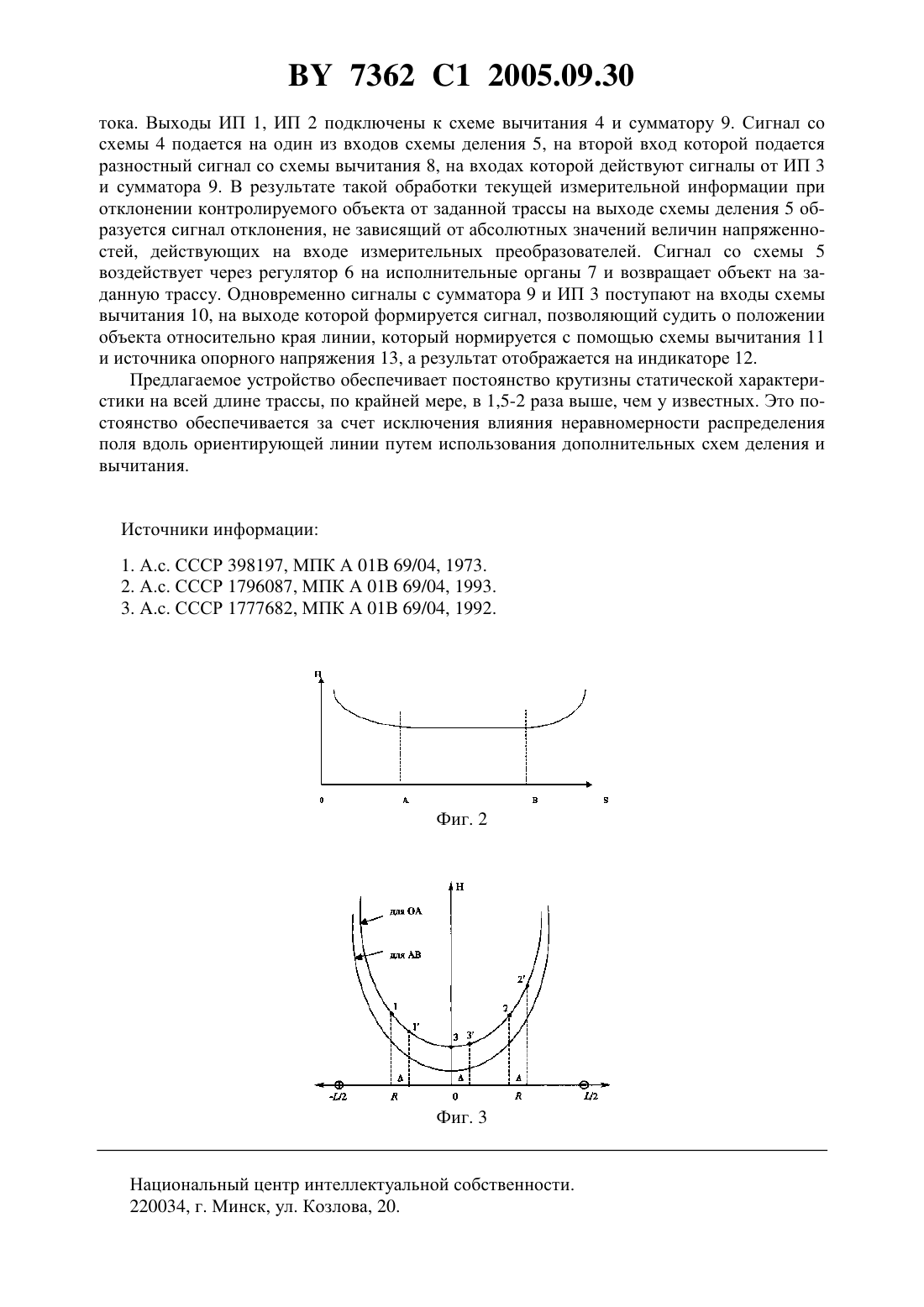
УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ НА ТРАССЕ МОБИЛЬНЫХ ОБЪЕКТОВ В ЭЛЕКТРОМАГНИТНОМ ПОЛЕ ТОКОНЕСУЩЕГО ПРОВОДНИКА(71) Заявитель Белорусский государственный университет(72) Авторы Новиков Валерий Александрович Хлыстова Ирина Григорьевна(73) Патентообладатель Белорусский государственный университет(57) Устройство для ориентации на трассе мобильных объектов в электромагнитном поле токонесущего проводника, уложенного в виде замкнутой рамки по краям трассы, содержащее первый, второй и третий измерительные преобразователи, первые два из которых расположены по краям мобильного объекта, симметрично относительно продольной оси его движения, а третий - на оси его движения, сумматор, первую, вторую и третью схемы вычитания, регулятор, источник опорного напряжения, индикатор и исполнительные органы управления мобильным объектом, при этом выходы первого и второго измерительных преобразователей соединены со входами первой схемы вычитания и сумматора 7362 1 2005.09.30 соответственно, выход третьего измерительного преобразователя соединен с первым входом третьей схемы вычитания, второй вход которой соединен с выходом сумматора, а выход через вторую схему вычитания соединен с индикатором, выход источника опорного напряжения соединен со вторым входом второй схемы вычитания, отличающееся тем,что содержит четвертую схему вычитания и схему деления, при этом первый и второй входы четвертой схемы вычитания соединены соответственно с выходом третьего измерительного преобразователя и выходом сумматора, а ее выход соединен с первым входом схемы деления, второй вход которой соединен с выходом первой схемы вычитания, а выход - со входом регулятора, выход которого соединен с исполнительными органами управления мобильным объектом. Изобретение относится к области приборостроения, в частности автоматизации управления мобильными объектами, и может быть применено в системах автоматической ориентации мобильных технологических объектов при задании опорного направления с помощью токонесущего проводника. Известно устройство для ориентации транспортных средств в электромагнитном поле токонесущего проводника, уложенного в виде рамки по краям трассы, содержащее два индукционных датчика, две схемы сравнения, сумматор, источник опорного напряжения и схему индикации 1. Известно также устройство для ориентации транспортных средств в электромагнитном поле токонесущего проводника, содержащее два индукционных измерительных преобразователя, сумматор, две схемы сравнения, управляемый делитель напряжения, регулятор 2. Недостатком известных устройств является непостоянство крутизны статической характеристики при движении по трассе. Известное устройство, выбранное в качестве прототипа заявляемого устройства 3,содержит три измерительных преобразователя, первые два из которых расположены симметрично по краям объекта, а третий - на продольной оси движения, сумматор, три схемы вычитания, регулятор, исполнительные органы, источник опорного напряжения и индикатор. Недостаток известного устройства заключается в непостоянстве крутизны его статической характеристики по длине трассы, что обусловлено нелинейным характером распределения поля вдоль ориентирующей линии, вследствие ограниченности ее физических размеров, то есть при приближении к краю ориентирующей линии из-за наличия замыкающего проводника напряженность поля возрастает и поэтому одному и тому же отклонению объекта на различных участках трассы будут соответствовать различные выходные сигналы. Задачей технического решения является создание устройства, способного стабилизировать крутизну статической характеристики на всей длине трассы. Поставленная задача достигается тем, что в известное устройство дополнительно ведены схема вычитания и схема деления, что позволяет достичь стабилизации статической характеристики устройства на всей длине трассы, выполненной в виде замкнутой рамки и уложенной по ее краям. На фиг. 1 представлена блок-схема устройства для ориентации на трассе мобильных объектов в электромагнитном поле токонесущего проводника, на фиг. 2 - эпюра распределения напряженности полявдоль ориентирующей линии , а на фиг. 3 - эпюра распределения напряженности поля поперек ориентирующей линии для участкови . Устройство содержит измерительные преобразователи (ИП) 1, 2, 3, первые два из которых расположены симметрично относительно продольной оси движения объекта, а третий - на оси его движения. Выходы ИП 1 и ИП 2 подключены к первой схеме вычитания 4 и сумматору 9. Выход ИП 3 подключен на первый вход третьей схемы вычитания 10 и схемы вычитания 8, а вторые входы этих схем подключены к выходу сумматора 9. Выход 2 7362 1 2005.09.30 схемы 8 подключен на первый вход схемы деления 5, а на второй ее вход подключен выход схемы 4. Выход схемы 5 подключен через регулятор 6 к исполнительным органам 7. Входы второй схемы вычитания 11 подключены к выходу схемы 10 и источнику опорного напряжения 13, выход - к индикатору 12. В связи с тем, что ориентирующая линия имеет конечные физические размеры, то при приближении к концу трассы, напряженность поля возрастает (фиг. 2). Отсюда одному и тому же отклонению объекта от заданной трассы на различных участках (, . фиг. 3) будут соответствовать разные уровни напряженности ориентирующего поля, то есть изменяется крутизна его статической характеристики. Поскольку измерительные преобразователи ИП 1, ИП 2 находятся на фиксированном расстоянии друг от друга симметрично продольной оси движения, то сигналы от них при нахождении объекта точно на трассе будут равны между собой (фиг. 3)( / 2) 22 где КМ/2,- ток в ориентирующей линии,- расстояние между токонесущими проводниками, т.е. собственно ширина ориентирующей линии,- расстояние от продольной оси объекта до места установки измерительных преобразователей ИП 1 и ИП 2,- параметр, характеризующий конструкцию измерительного преобразователя, проводимость среды и так далее. Сигнал с третьего преобразователя будет в этом случае равен 4 При отклонении объекта от трассы на величинусоответственно имеем где- фактически отклонение объекта от трассы. Далее найдем разность и сумму сигналов от ИП 1 и ИП 2, переходя для удобства рассуждений к обратным величинам Разделив разностный сигнал на предлагаемую величину, получаем 1 121 1422 2 Таким образом, в результате получается сигнал, величина которого определяется только значением фактического отклонения объекта, независимо от того, на каком участке трассы находится объект, то есть крутизна статической характеристики устройства остается постоянной. При движении по трассе ИП 1, ИП 2, ИП 3 воспринимают магнитную составляющую ориентирующего поля и преобразуют в аналоговый сигнал постоянного 7362 1 2005.09.30 тока. Выходы ИП 1, ИП 2 подключены к схеме вычитания 4 и сумматору 9. Сигнал со схемы 4 подается на один из входов схемы деления 5, на второй вход которой подается разностный сигнал со схемы вычитания 8, на входах которой действуют сигналы от ИП 3 и сумматора 9. В результате такой обработки текущей измерительной информации при отклонении контролируемого объекта от заданной трассы на выходе схемы деления 5 образуется сигнал отклонения, не зависящий от абсолютных значений величин напряженностей, действующих на входе измерительных преобразователей. Сигнал со схемы 5 воздействует через регулятор 6 на исполнительные органы 7 и возвращает объект на заданную трассу. Одновременно сигналы с сумматора 9 и ИП 3 поступают на входы схемы вычитания 10, на выходе которой формируется сигнал, позволяющий судить о положении объекта относительно края линии, который нормируется с помощью схемы вычитания 11 и источника опорного напряжения 13, а результат отображается на индикаторе 12. Предлагаемое устройство обеспечивает постоянство крутизны статической характеристики на всей длине трассы, по крайней мере, в 1,5-2 раза выше, чем у известных. Это постоянство обеспечивается за счет исключения влияния неравномерности распределения поля вдоль ориентирующей линии путем использования дополнительных схем деления и вычитания. Источники информации Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G05D 3/00, A01B 69/04
Метки: трассе, ориентации, проводника, токонесущего, электромагнитном, объектов, устройство, поле, мобильных
Код ссылки
<a href="https://by.patents.su/4-7362-ustrojjstvo-dlya-orientacii-na-trasse-mobilnyh-obektov-v-elektromagnitnom-pole-tokonesushhego-provodnika.html" rel="bookmark" title="База патентов Беларуси">Устройство для ориентации на трассе мобильных объектов в электромагнитном поле токонесущего проводника</a>
Способ получения материалов или изделий из поляризуемой или намагничиваемой жидко-дисперсной композиции в электромагнитном поле

Номер патента: 4396
Опубликовано: 30.03.2002
Авторы: Кашевский Бронислав Эдуардович, Суворов Александр Васильевич
МПК: B29C 35/08, C08J 5/00, C08J 3/00...
Метки: поляризуемой, изделий, поле, композиции, или, получения, способ, материалов, жидко-дисперсной, намагничиваемой, электромагнитном
Текст:
...цепочек между собой в заготовке образуется динамическая структура, характер которой зависит от электромагнитных свойств частиц, напряженности поля, скорости его вращения относительно заготовки и вязкости связующего. В процессе отверждения эта структура фиксируется. Возможность влияния относительного вращения поля и заготовки на характер распределения частиц наполнителя зависит от величины напряженности поля по отношению к...
Чехол для защиты биологических объектов от электромагнитного воздействия мобильных малогабаритных приёмопередающих устройств
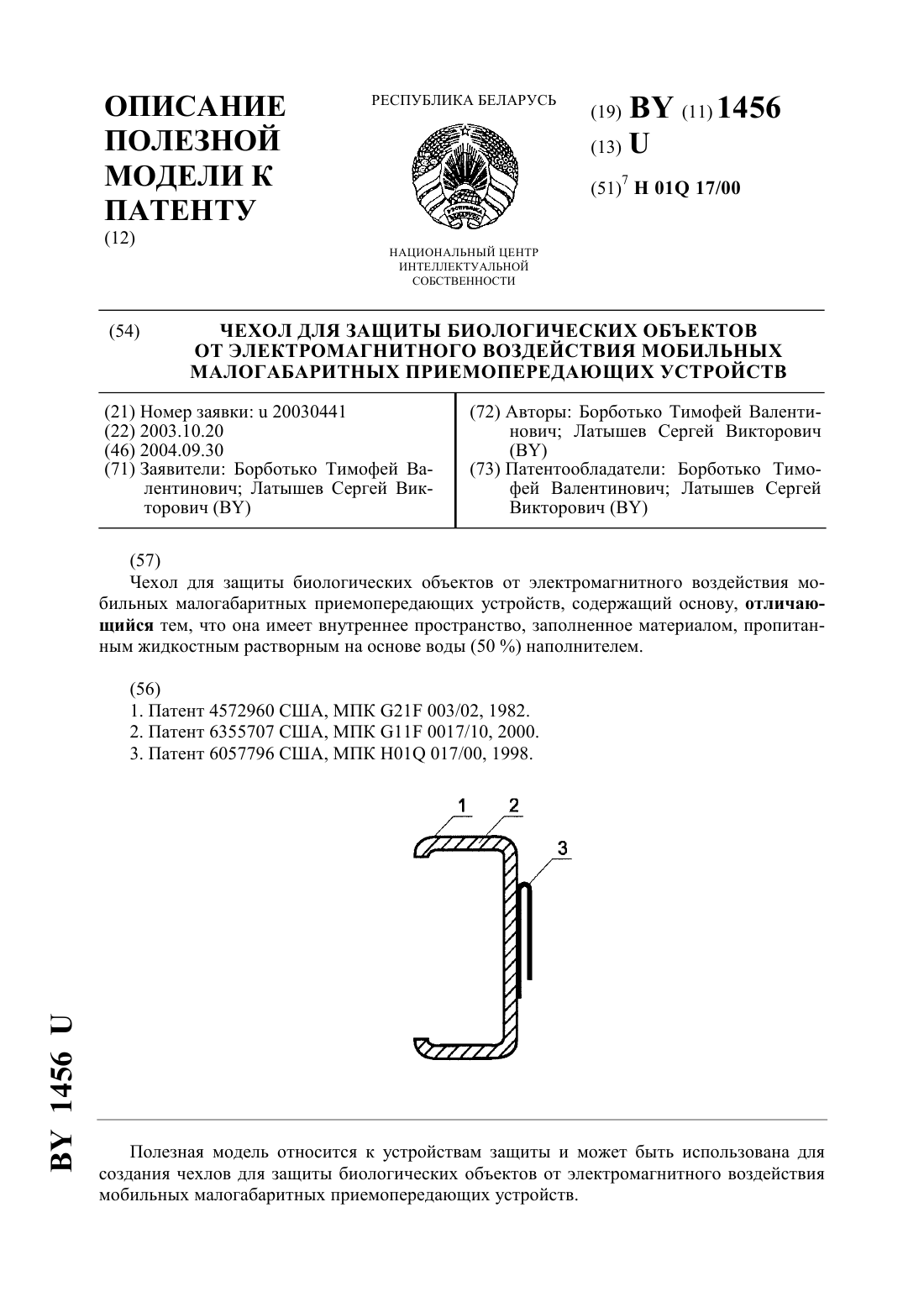
Номер патента: U 1456
Опубликовано: 30.09.2004
Авторы: Латышев Сергей Викторович, Борботько Тимофей Валентинович
МПК: H01Q 17/00
Метки: мобильных, малогабаритных, объектов, приёмопередающих, устройств, биологических, электромагнитного, воздействия, чехол, защиты
Текст:
...слой которой выполнен из поглощающего материала с симметрично расположенными отверстиями по всей площади поверхности, второй слой представляет собой многослойный отражающий материал 3. Недостатком данной конструкции является узкий диапазон рабочих частот и сложность технологического процесса изготовления. Задачей данной полезной модели является защита биологических объектов от электромагнитного воздействия мобильных малогабаритных...
Устройство для контроля температуры вращающихся объектов

Номер патента: 6124
Опубликовано: 30.06.2004
Авторы: Волков Михаил Владимирович, Громыко Алексей Викторович, Гринчук Анатолий Петрович, Хитько Валентин Иванович
МПК: G01K 13/08
Метки: температуры, устройство, контроля, объектов, вращающихся
Текст:
...блок-схема устройства. Устройство содержит несколько термочувствительных элементов ТЭ 1, ТЭ 2 , выполненных в виде индукционных катушек,намотанных на сердечники из термочувствительного ферромагнитного материала, индукционный термозависимый датчик , индукционный датчикконтроля работоспособности,двухчастотный генератор 1, катушки возбуждения 1, 2, частотно-селективные приемники 2 и 3 с приемными катушками 5 и 6, и индикаторы 4, 5, 9, триггер 6,...
Устройство для абразивной обработки в магнитном поле деталей типа тел вращения
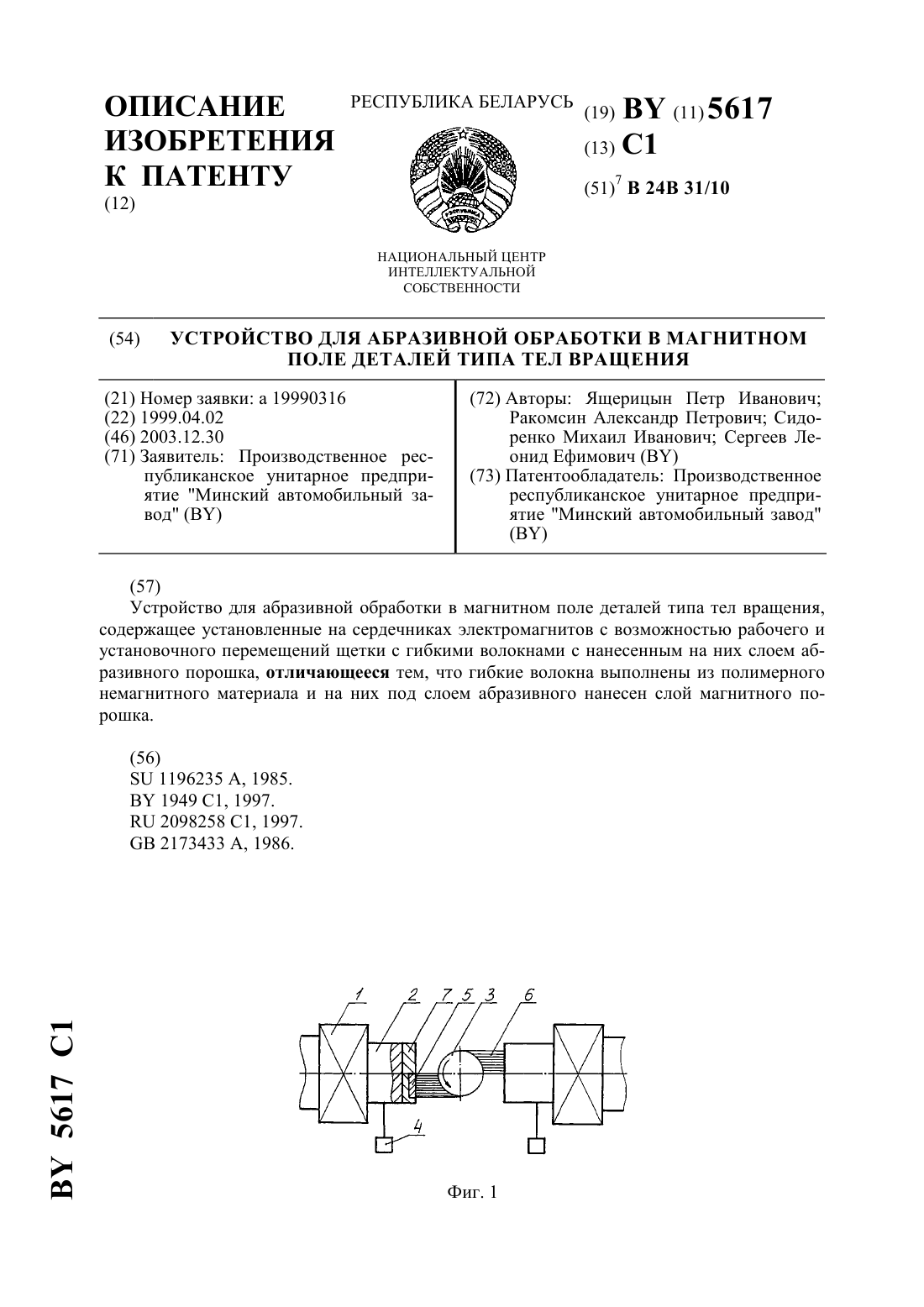
Номер патента: 5617
Опубликовано: 30.12.2003
Авторы: Ящерицын Петр Иванович, Сергеев Леонид Ефимович, Ракомсин Александр Петрович, Сидоренко Михаил Иванович
МПК: B24B 31/10
Метки: поле, обработки, тел, деталей, вращения, устройство, абразивной, типа, магнитном
Текст:
...на сердечниках электромагнитов с возможностью рабочего и установочного перемещения щетки с гибкими волокнами с нанесенным на них слоем абразивного порошка, гибкие волокна выполнены из полимерного немагнитного материала и на них под слоем абразивного нанесен слой магнитного порошка. Гибкие волокна из полимерного немагнитного материала, например из пластика, нанесенными на них слоями магнитного и абразивного порошков, за счет имеющегося...
Устройство для сбора нефтепродуктов с поверхности водных объектов
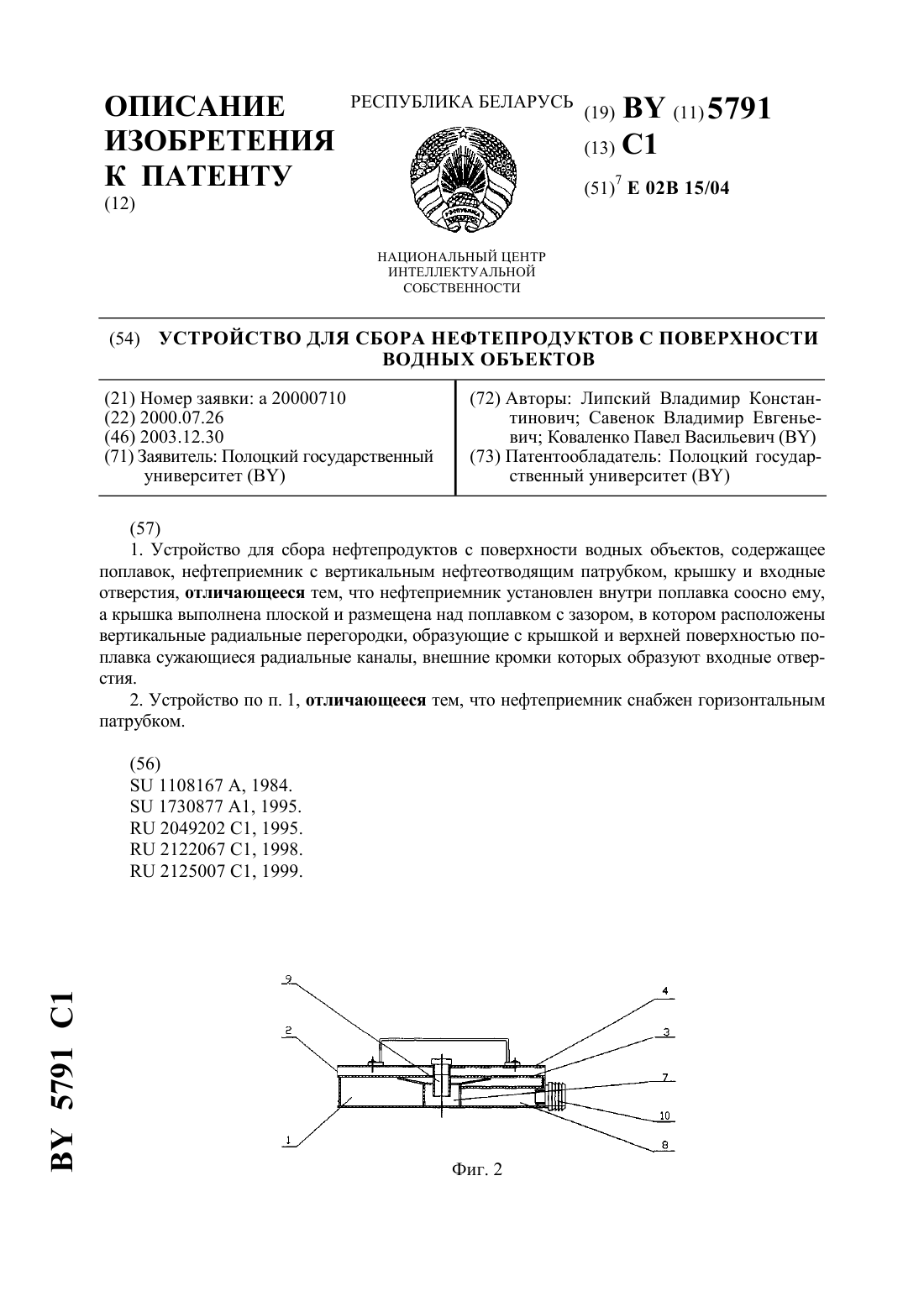
Номер патента: 5791
Опубликовано: 30.12.2003
Авторы: Липский Владимир Константинович, Коваленко Павел Васильевич, Савенок Владимир Евгеньевич
МПК: E02B 15/04
Метки: сбора, объектов, водных, нефтепродуктов, поверхности, устройство
Текст:
...работы устройства, возможность использования устройства в труднодоступных местах Поставленная задача решается тем, что в устройстве для сбора нефтепродуктов с поверхности водных объектов, включающем поплавок, нефтеприемник с вертикальным нефтеотводящим патрубком, крышку и входные отверстия, в отличие от прототипа, нефтеприемник установлен внутри поплавка соосно ему, а крышка выполнена плоской и размещена над поплавком с зазором, в...
Предыдущий патент: Твердофазный ферментер и способ твердофазного культивирования
Следующий патент: Шаровая передача
Случайный патент: Станок для магнитно-абразивной обработки прямозубых зубчатых колёс внутреннего зацепления