Автомат-резчик керамического бруса
Текст
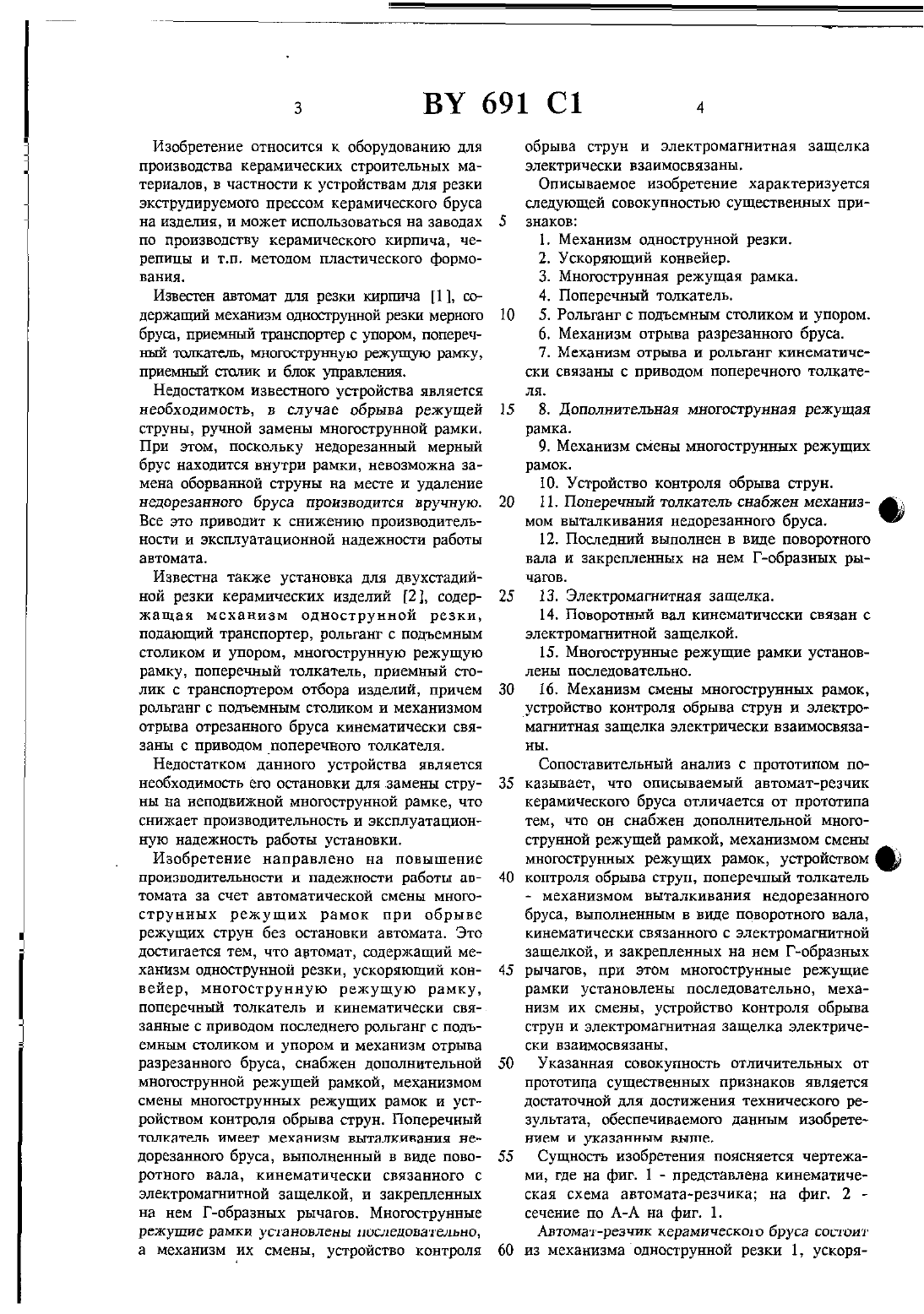
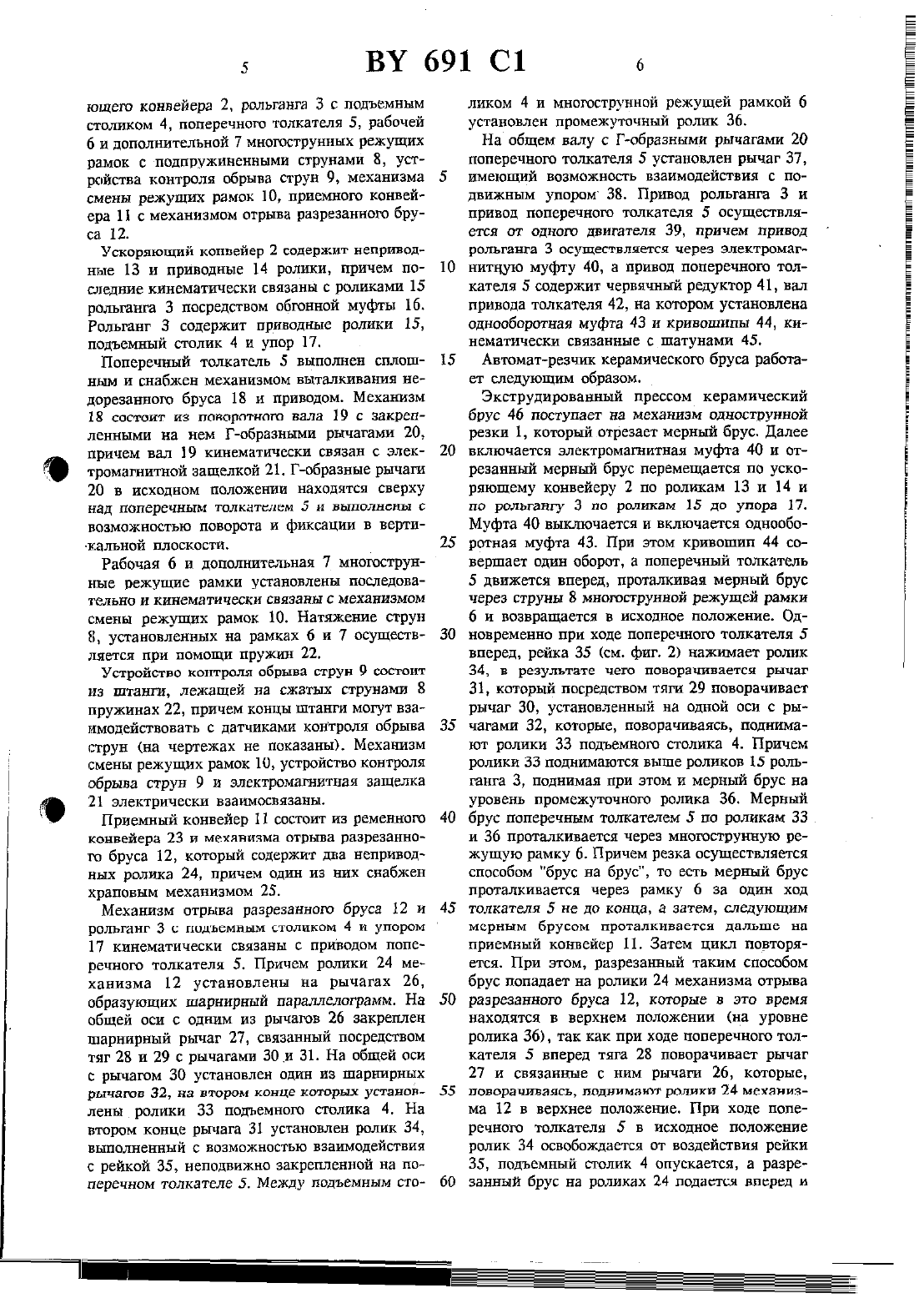
(12) государственное патентное ведомство гвспътвлиют ввлкгусь(57) Автомат-резчик керамического бруса, содержащий механизм однострунной резки, ускоря ющий конвейер, многострунную режущуюрамку, поперечный толкатель и кинематически связанные с приводом последнего рольганг с подъемным столиком и упором и механизм отрыва разрезанного бруса, отличающийся тем, что он снабжен дополнительной многострунной режущей рамкой, механизмом смены многострунных режущих рамок, устройством контроля обрыва струн, поперечный толкательбруса, выполненным в виде поворотного вала,кинематически связанного с электромагнитной защелкой, И закрепленных на нем Г-образных рычагов, при этом многострунные режущие рамки установлены последовательно, механизм Их смены, устройство контроля обрыва струн и электромагнитная защелка электричеСКИ ВЗЗИМОСВЯЗЗНЫ.Изобретение относится к оборудованию для производства керамических строительных материалов, в частности к устройствам для резки экструдируемого прессом керамического бруса на изделия, и может использоваться на заводах по производству керамического кирпича, черепицы и т.п. методом пластического формования.Известен автомат для резки гсиргшча 1, оодержагдтгй механизм однострунной резки мерного бруса, приемный транспортер с упором, поперечный толкатель, многострунную режущую рамку,приемный столик и блок управления.Недостатком известною устройства является необходимость, в случае обрыва режущей струны, ручной замены многострунной рамки. При этом, поскольку недорезанный мерный брус находится внутри рамки, невозможна замена оборванной струны на месте и удаление недорезанного бруса производится вручную. Все это приводит к снижению производительности и эксплуатационной надежности работы автомата.Известна также установка для двухстадийной резки керамических изделий 2 1, содерЖЭЩВЯ МЕХЭНИЗМ ОДНОСТрУННОЙ РЕЗКИ,подающий транспортер, рольганг с подъемным столиком и упором, многострунную режущую рамку, поперечный толкатель, приемный столик с транспортером отбора изделий, причем рольганг с подъемным столиком и механизмом отрыва отрезанного бруса кинематически связаны с приводом поперечного толкателя.Недостатком данного устройства является необходимость его остановки для замены струны на неподвижной многострунной рамке, что снижает производительность и эксплуатационную надежностъ работы установки.Изобретение направлено на повышение ПРОИЗВОДИТЕЛЬНОСТИ И НЕДЕЛИ-ГОСТИ работы ЗВТОМЗТЗ за СЧЕТ ЗВТОМВТИЧВСКОЙ СМЕНЫ МНОГОструнных режущих рамок при обрыве режущих струн без остановки автомата, Это достигается тем, что автомат, содержащий механизм однострунной резки, ускоряющий конвейер, многострунную режущую рамку,поперечныи толкатель и кинематически связанные с приводом последнею рольганг с подъемным столиком и упором и механизм отрыва разрезанного бруса, снабжен дополнительной многострунной режущей рамкой, механизмом смены шгогострунных режущих рамок и устройством контроля обрыва струн. Поперечный ТОЛКЭТЕЛЬ ИМЕЕТ МЕХЗНИЗМ ВЫТЗЛКИВЗНИЯ непорезанного бруса, выполненный в виде поворотного вала, кинематически связанного с электромагнитной защелкой, и закрепленных на нем Г-образных рычагов. многострунные рСЖуЩИС рдМКИ УСТЗНОВЛСНЫ ПОСЛСДОВЭТВЛЬНО,а механизм их смены, устройство контроляобрыва струн и электромагнитная защелка электрически взаимосвязаны.Описываемое изобретение характеризуется следующей совокупностью существенных признаков6. Механизм отрыва разрезанного бруса.7. Механизм отрыва и рольганг кинематически связаны с приводом поперечного толкателя.8. Дополнительная многострунная режущая рамка.9. Механизм смены многострунных режущих рамок.10. Устройство контроля обрыва струн.11. Поперечный толкатель снабжен механизмом выталкивания недорезанного бруса.12. Последний выполнен в виде поворотного вала и закрепленных на нем Г-образных рычагов.14. Поворотный вал кинематически связан с электромагнитной защелкой.15. Многострунные режущие рамки установлены последовательно.16. Механизм смены многострунных рамок, устройство контроля обрыва струн и электро магнитная защелка электрически взаимосвязаны.Сопоставительный анализ с прототипом показывает, что описываемый автомат-резчик керамического бруса отличается от прототипа тем, что он снабжен дополнительной мноюструнной режущей рамкой, механизмом смены многострунных режущих рамок, устройством контроля обрыва струн, поперечный толкатель МБХЗНИЗМОМ ВЫТЗЛКИВВНИЯ НСДОРЕЗНННОГО бруса, выполненным в виде поворотного вала,кинематически связанного с электромагнитной защелкой, и закрепленных на нем Г-образных рычагов, при этом многострунные режущие рамки установлены последовательно, механизм их смены, устройство контроля обрыва струн и электромагнитная защелка электрически взаимосвязаны.Указанная совокупность отличительных от прототипа существенных признаков является достаточной для достижения технического результата, обеспечиваемого данным изобретеНИЕМ И указанным ВЬТШЕ.Сущность изобретения поясняется чертежами, где на фиг. 1 - представлена кинематическая схема автомата-резчика на фиг. 2 сечение по А-А на фиг. 1.Автомат-резчик керамического бруса состоит из механизма однострунной резки 1, ускорятощего конвейера 2, рольгавга 3 с подъемным столиком 4, поперечного толкателя 5, рабочей 6 и дополнительной 7 многострунных режущих рамок с подпружиненными струнами 8, устройства контроля обрыва струн 9, механизма смены режущих рамок 10, приемного конвейера 11 с механизмом отрыва разрезанного бруса 12.Ускоряющий конвейер 2 содержит неприводные 13 и приводные 14 ролики, причем последние кинематически связаны с роликами 15 рольганга 3 посредством обгонной муфты 16. Рольганг З содержит приводные ролики 15 подъемный столик 4 и упор 17.Поперечный толкатель 5 выполнен сплошным и снабжен механизмом выталкивания недорезанного бруса 18 и приводом. Механизм 18 состоит из поворотного вала 19 с закрепленными на нем Г-образными рычагами 20,причем вал 19 кинематически связан с электромагнитной защелкой 21. Г-образные рычаги 20 в исходном положении находятся сверху Над ПОПВРВЧНЫМ ТОЛКНТЕЛВМ 5 И БЫПОЛНСНЫ С возможностью поворота и фиксации в верти кальной плоскости.Рабочая 6 и дополнительная 7 многострунные режущие рамки установлены последовательно и кинематически связаны с механизмом смены режущих рамок 10. Натяжение струн 8, установленных на рамках 6 и 7 осуществляется при помощи пружин 22.Устройство контроля обрыва струн 9 состоит из штанги, лежащей на сжатых струнами 8 пружинах 22, причем концы штанги могут взаимодействовать с датчиками контроля обрыва струн (на чертежах не показаны). Механизм смены режущих рамок 10, устройство контроля обрыва струн 9 и электромагнитная защешса 21 электрически взаимосвязаны.Приемный конвейер 11 состоит из ременного конвейера 23 и механизма отрыва разрезанного бруса 12, который содержит два неприводных ролика 24, причем один из них снабжен храповым механизмом 25.Механизм отрыва разрезанного бруса 12 и рольганг 3 с подъемным столиком 4 и упором 17 кинематически связаны с приводом поперечного толкателя 5. Причем ролики 24 механизма 12 установлены на рычагах 26,образующих Шарнирный параллелограмм. На общей оси с одним из рычагов 26 закреплен Шарнирный рычат 27, связанный посредством тяг 28 и 29 с рычагами 30 и 31. На общей оси с рычагом 30 установлен один из шарнирных рычагов 32, на втором конце которых установлены ролики 33 подъемного столика 4. На втором конце рычага 31 установлен ролик 34,выполненный с возможностью взаимодействия с рейкой 35, неподвижно закрепленной на поперечном толкателе 5. Между подъемным сто 10ликом 4 и многострунной режущей рамкой 6 установлен промежуточный ролик 36.На общем валу с Г-образными рычагами 20 поперечного толкателя 5 установлен рычаг 37,имеющий возможность взаимодействия с подвижным упором 38. Привод рольганга 3 и привод поперечного толкателя 5 осуществляется от одного двигателя 39, причем привод рольганга 3 осуществляется через электромагнитную муфту 40, а привод поперечного толкателя 5 содержит червячный редуктор 41, вал привода толкателя 42, на котором установлена однооборотная муфта 43 и кривошипы 44, кинематически связанные с шатунамн 45.Автомат-резчик керамического бруса работает следующим образом.Экструдированный прессом керамический брус 46 поступает на механизм однострунной резки 1, который отрезает мерный брус. Далее включается электромагнитная муфта 40 и отрезанный мерный брус перемещается по ускоряюшему конвейеру 2 по роликам 13 и 14 и по рольгангу 3 по роликам 15 до упора 17. Муфта 40 выключается и включается однооборотная муфта 43. При этом кривошип 44 совершает один оборот, а поперечный толкатель 5 движется вперед, проталкивая мерный брус через струны 8 многострунной режущей рамки 6 и возвращается в исходное положение. Одновременно при ходе поперечного толкателя 5 вперед, рейка 35 (см. фиг. 2) нажимает ролик 34, в результате чего поворачивается рычаг 31, который посредством тяги 29 поворачивает рычаг 30, установленный на одной оси с рычагами 32, которые, поворачиваясь, поднимают ролики 33 подъемного столика 4. Причем ролики 33 поднимаются выше роликов 15 рольганга 3, поднимая при этом и мерный брус на уровень промежуточного ролика 36. Мерный брус поперечным толкателем 5 по роликам 33 и 36 проталкивается через многострунную режущую рамку 6. Причем резка осуществляется способом брус на брус, то есть мерный брус проталкивается через рамку 6 за один ход толкателя 5 не до конца, а затем, следующим МЗРНЫМ бруСОМ ПРОТЗЛКИВЗСТСЯ ДЗЛЬШВ на приемный конвейер 11. Затем цикл повторяется. При этом, разрезанный таким способом брус попадает на ролики 24 механизма отрыва разрезанного бруса 12, которые в это время находятся в верхнем положении (на уровне ролика 36), так как при ходе поперечного толкателя 5 вперед тяга 28 поворачивает рычаг 27 и связанные с ним рычаги 26, которые,поворачиваясь, поднимают ролики 24 механизма 12 в верхнее положение. При ходе поперечного толкателя 5 в исходное положение ролик 34 освобождается от воздействия рейки 35, подъемный столик 4 опускается, а разрезанный брус на роликах 24 подается вперед иопускается на ветви ременного конвейера 23. При этом крановой механизм 25 не дает ролику 24 проворачиваться назад.В случае обрыва хотя бы одной из струн 8 на рабочей многострунной режущей рамке 6 пружина 22 распрямляется н поднимает штангу устройства контроля обрыва струн 9. При этом срабатывает датчик контроля обрыва струн (на чертежах не показан).Сигнал, выработанный датчиком, поступает на электромагнитную защелку 21, которая освобождает поворотный вал 19 и Г-образные рычаги 20, при этом опускается при одновременном движении поперечного толкателя 5 вперед. Недорезанньпй брус проталкивается Гобразными рычагами 20 вперед из зоны режущей рамки 6. При ходе поперечного толкателя5 назад рычаг 37 упирается в упор 38, Г-образные рычаги 20 поднимаются в исходное положение и электромагнитная защелка 21 фиксирует поворотный вал 19. После проталкивания недорезанною бруса вкшочается привод механизма смены режущих рамок 10,который перемещает резервную многострунную режущую рамку 7 на место основной рамки 6 и автомат продолжает работу в автоматическом режиме.В это время оборванная струна на рамке 6 заменяется. Так как рольганг З и поперечный толкатель 5 в процессе работы автомата не включается одновременно, привод рольганга 3 и поперечного толкателя 5 осуществляется от одного двигателя 39, который постоянно вклю ЧСН.Государственное патентное ведомство Республики Беларусь, 220072, г. Минск, проспект Ф. Скорины, 66.
МПК / Метки
МПК: B28B 11/14
Метки: керамического, автомат-резчик, бруса
Код ссылки
<a href="https://by.patents.su/4-691-avtomat-rezchik-keramicheskogo-brusa.html" rel="bookmark" title="База патентов Беларуси">Автомат-резчик керамического бруса</a>
Шихта керамического материала для высокочастотных термокомпенсирующих конденсаторов
Номер патента: 275
Опубликовано: 30.12.1994
Авторы: Самойлов В. В., Костомаров В. С., Голубцова Л. А.
МПК: H01G 4/12, C04B 35/46
Метки: термокомпенсирующих, керамического, материала, конденсаторов, шихта, высокочастотных
Текст:
...керамических ДИЭЛЕКТРИКОВ Нможет быть использовано при изготовлении высокочастотны термокомпенсиЦель изобретения повышение диэлектрической проницаемости и удель тивления керамики при повышенным тем дературах.Шихту керамического материала дляматериалов получают следующим-обра 15 зоМ.Й 2 - и Предварительно иавестнвм в карами песком производстве образом получают спекититанатакальцияъттитаиатастронция,Которые синтезируют при 1220 д 2 о-ной...
Механизм прокачки ушковых игл основовязальной машины
Номер патента: 637
Опубликовано: 30.06.1995
Авторы: Бегунов Петр Михайлович, Василюк Петр Юлианович, Тоникян Дина Николаевна, Рагоза Игорь Вячеславович
МПК: D04B 25/02
Метки: ушковых, игл, механизм, основовязальной, машины, прокачки
Текст:
...к гребенке, и пружины 24, работающей на сжатие на винте 23 между его головкой и диском.Стойка 25 связана с рычагом 5 с помошью шарнира, ось которого установлена на ползуне 26, фиксируемом на рычаге 5 винтом 27.Стойка 25 закреплена на плите 18 станины винтом 28, проходящим через кулисное отверстие в основании стойки 25.Рычаг 5 связан с серьгой 6 шарниром,ось которого установлена на ползуна 29,фиксируемом на рычаге 5 винтом.Механизм работает...
Предыдущий патент: Устройство для испытания образца заклепочного соединения двух деталей на усталость при изгибе
Следующий патент: Штамповая сталь
Случайный патент: Состав для получения металлизационной пасты для алюмооксидной керамики