Устройство управления сельскохозяйственной машиной со штанговым рабочим органом для внесения удобрения, ядохимикатов и других веществ
Номер патента: 1829
Опубликовано: 30.12.1997
Авторы: Сидоренко Юрий Александрович, Рагунович Сергей Петрович, Дональд Мк Грас
Текст
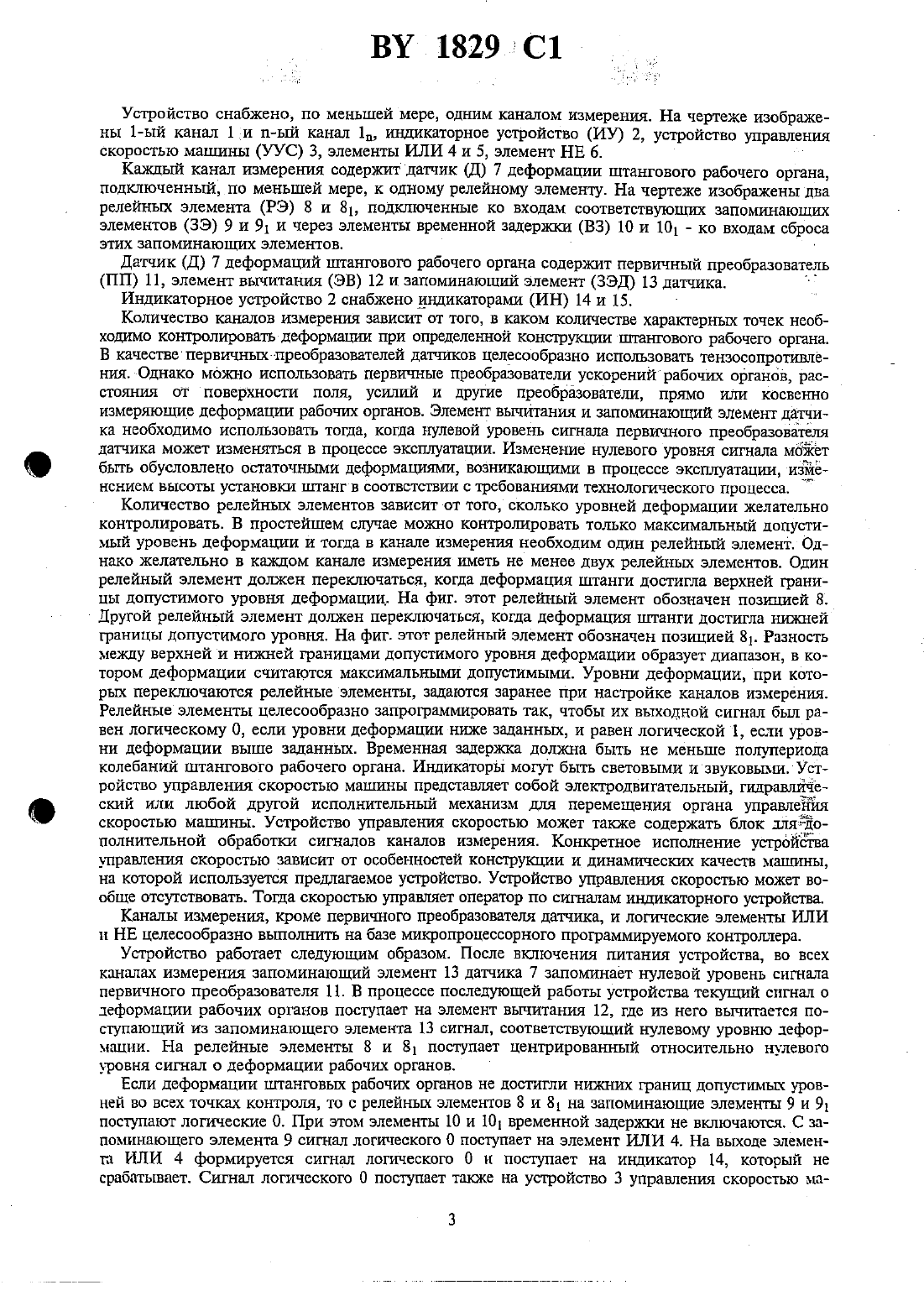
ГОСУДАРСТВЕННЫЙ ПАТЕНТНЫЙ КОМИТЕТ РЕСПУБЛИКИ БЕЛАРУСЬ(54) УСТРОЙСТРО УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНОИ СО ШАНГОВЫМ РАБОЧИМ ОРГАНОМ ДЛЯ ВНЕСЕНИЯ УДОБРЕНИИ, ЯДОХИМИКАТОВ ИЛИ ДРУГИХ ВЕТЦЕСТВ(ВУ), Дональд Мк Грас (ИЗ)(73) Патентообладатели Сидоренко Юрий Алек сандрович, Скотников Андрей Валерьевич (ВТ), Дональд Мк Г рас (ИЗ) у1. Устройство управления сельскохозяйственной машиной со штанговым рабочим органом для внесения удобрений, ядохимикатов или других веществ, содержащее запоминающий элемент, отличающееся тем, что устройство снабжено, по меньшей мере, одним каналом измерения, который содержит датчик деформации штангового рабочего органа, подключенный, по меньшей мере, к одному релейному элементу, который подключен ко входу соответствующего запоминающего элемента и через элемент временной задержки - ко входу сброса запоминающего элемента, выходы запоминающих элементов являются выходами канала измерения и связаны с индикаторным устройством и/или устройством управления скоростью машины.3. Устройство по п.1, отличающееся тем, что датчик деформации Штангового рабочего органа содержит первичный преобразователь, выход которого непосредственно и через запоминающий элемент подключен к соответствующим входам элемента вычитания.3. Устройство по п.1, отличающееся тем, что выходы канала измерения подключены к тиши квторному устройству и/или устройству управления Через элемент ИЛИ или последовательно Ю соединенные элементы ИЛИ и НЕ.Изобретение относится к сельскохозяйственному машиностроению и может быть использовано на сельскохозяйственных мани/шах со штанговым рабочим органом для внесения удобрений, ядохимикатов и других веществ.Известно устройство ЦТСМЗ 100 СНЗТОМ МОЪПТОШЫС БУБТЕМ 1 для управления сельскохозяйственной машиной со нггат-тговьш рабочим органом, содержащее систему стабилизации нормы внесения удобрений, ядохимикатов идти других веществ при изменении скорости мапшны.Недостатком устройства является то, что оператор выбирает скорость движения машины без учета деформаций штанговых рабочих органов, что отрицательно сказывается на качестве выполнения технологического процесса.Известно также устройство для Контроля работы сельскохозяйственных машин для внесения жидкостей 2 содержащее датчик скорости, расхода и положения управляющей заслонтш,индикатор и исполнительный механизм, операционный блок, включающий запоминающий элемент, преобразователи сигналов датчиков и микро-ЭВМ. Устройство повьпнает точность расхода жидкости на единицу обрабатываемой площади за счет изменения расхода Жидкости через форсунки распылителя при изменении скорости машины.Недостатком устройства является то, что оператор выбирает скорость движения машины без учета деформаций штанговых рабочих органов. Недостаток обусловлен следутоцтим. Для увеличения производительности и уменьшения энергозатрат на обработку больцшх площадей такие машины снабжены штат-новыми рабочими органашг длиной до десятков метров, устат-говленньшш на мапшне консольно. На штангах расположены форсунки для распьшентгяхшшюстей или других веЩССТВ- При Цвихсентш МШШ/ЩЪЕ на НЕЕ Воздействуют неровности рельефа местности. Эти воздействия через шасси машшты передаются на шташи, которые непрерывно деформиршотся. При этом форсунки то приближаются к поверхности поля, то удаляются от нее. При приближении форсунки к поверхности сечение факела распыляемого вещества на поверхности меньше и поверхностная плотность внесения больше, при удалении форсунки от поверхности сечение факела распыляемого Вещества на поверхности больше и поверхностная плотность внесения меньше. Часто необходимо опрыскивать растения на определенной высоте. Тогда часть растеъшй оказывается обработал-той не на нужной высоте или на растения не попадает нужною кодгичества вещества. Флуктации плотности внесения приводят к потере урожайности. Часть урожая содержит повьпцех-п-гое количество вредных шцшчесюш веществ. Кроме того, при повьпленных деформациях штат-пи ломаются.Предлагаемое изобретение решает Задачу стабилизации поверхностной плотности внесения удобрений, ядохимикатов или других веществ, увеличения производительности машины и снижения риска поломок штанговых рабочих органов путем подачи сигналов оператору машины и/или на устройство управления скоростью машины о том, что деформации штанги превысили допустимый уровень и следует снизить скорость мацшньт, о том, что деформации штанги максимальные допустимые и увеличивать скорость машины нельзя или о том, что деформации штанги ниже допустимых и можно увеличить скорость машины.Для решения задачи устройство управления сельскохозяйственной машиной со штанговым рабочим органом для внесения удобрений, ядохимикатов или других веществ, содержащее запоминающий элемент, снабжено, по меньшей мере, одним каналом-измерения, который содержит датчик деформации штангового рабочего органа, подключенный, по меньшей мере, к Одному релейному элементу, который Подключен ко входу соответствующего запоминающего элемента и через элемент временной задержки - ко входу сброса запоминающего элемента,выходы запоминающих элементов являются выходами канала измерения и связаны с индикаторным устройством и/или устройством управления скоростью машины.Датчик деформации штангового рабочего органа содержит первичный преобразователь, выход которого непосредственно и через запоминающей элемент подключен к соответствующим входам элемента вычитания.Каналы измерения подключены к индикаторному устройству и/или устройству управления через элемент ИЛИ или последовательно соединенные элементы ИЛИ и НЕ.На фиг. изображена структурная схема предложенного устройства.Устройство снабжено, по меньшей мере, одним каналом измерения. На чертеже изображены 1-ьгй канал 1 и п-ый канал 1,1, индикаторное устройство (ИУ) 2, устройство управления скоростью машины (УУС) 3, элементы ИЛИ 4 и 5, элемент НЕ 6. Канспый канал Измерения содержит датчик (Д) 7 деформации штанговото рабочего органа,подключенный, по меньшей мере, к одному релейному элементу. На чертеже изображены два релейных элемента (РЭ) 8 и 81, подключенные ко входам соответствующих запоминающих элементов (ЗЭ) 9 и 91 и через элементы временной задержки (ВЗ) 10 и 101 - ко входам сброса этих запоминающих элементов.Датчик (Д) 7 деформаций штанговото рабочего органа содержит первичный преобразовательКоличество каналов измерения зависит от того, в каком количестве характерных точек необходимо контролировать деформашш при определенной конструкции штанговото рабочего органа. В качествепервичных-преобразователей датчиков Целесообразно использовать тензосопротивлгения. Однако мола-го использовать первичные преобразователи ускорений рабочих органов, расстояния от поверхности поля, усилий и другие преобразователи, прямо или косвенно измеряющие деформации рабочих органов. Элемент вычитания и запоминающий элемент датчика необходимо использовать тогда, когда нулевой уровень сигнала первичного преобразователя датчика может изменяться в процессе эксплуатации. Изменение нулевого уровня сигнала мйкет быть обусловлено остаточными деформациями, вознршаюцгиьш в процессе эксплуатации, изменснием высоты установки штанг в соответствии с требованиями технологического процесса. тКоличество релейных элементов зависит от того, сколько уровней деформации желательно контролировать. В простейшем случае можно контролировать только максимальный допустимый уровень деформации и тогда в канале измерения необходим один релейный элемент. Однако желательно в каждом канале измерения иметь не менее двух релейных элементов. Один релейный элемент должен переключаться, когда деформация штанги достигла верхней границы допустимого уровня деформации, На фит. этот релейный элемент обозначен позицией 8. Другой релейный элемент должен переключаться, когда деформация штанги достигла нижней границы допустимого уровня. На фиг. этот релейный элемент обозначен позицией 81. Разность мехщу верхней и нилсней границами допустимого уровня деформации образует Диапазон, в котором деформации считаются максимальными допустимыми. Уровни деформации, при которых переключаются релейные элементы, задаются заранее при настройке каналов измерения. Релейные элементы целесообразно запрограммировать так, чтобы их выходной сигнал был равен логическому О, если уровни деформации ниже заданных, и равен логической 11, если уровни деформации выше заданных. Временная задержка должна быть не меньше полупериода колебаний штанговото рабочего органа. Индикаторы могут быть световыми извуковыхшцУстройство управления скоростью машины представляет собой электродвигательный, гиправггический или любой другой исполнительный механизм для перемещения органа управле ия скоростью машины. Устройство управления скоростью может тагоке содержать блок для дополнительной обработки сигналов каналов измерения. Конкретное исполнение усгройтвва управления скоростью зависит от особенностей конструкции и динамических качеств магшгньг,на которой используется предлагаемое устройство. Устройство управления скоростью может вообще отсутствовать. Тогда скоростью управляет оператор по сигналам индикаторного устройства.Каналы измерения, кроме первичного преобразователя датчика, и логические элементы ИЛИ и НЕ целесообразно вьшолнить на базе микропроцессорного программируемого контроллера.Устройство работает следующим образом. После включения питания устройства, во всех каналах измерения запоминающий элемент 13 датчика 7 запоминает нулевой уровень сигнала первичного преобразователя 11. В процессе последующей работы устройства текущий сигнал о деформации рабочих органов поступает на элемент вычитания 12, где из него вычитается поступающий из запоминающего элемента 13 сигнал, соответствующий нулевому уровню деформации. На релейные элементы 8 и 81 поступает центрированный относительно нулевого уровня сигнал о деформации рабочих органов.Если деформации штанговых рабочих органов не достигли нижних границ допустимых уровней во всех точках контроля, то с релейных элементов 8 и 81 на запоминающие элементы 9 и 91 поступают логические О. При этом элементы 10 и 101 временной задержки не включаются. С запоминающего элемента 9 сигнал логического 0 поступает на элемент ИЛИ 4. На выходе элемента ИЛИ 4 формируется сигнал логического 0 и поступает на индикатор 14, который не срабатывает. Сигнал логического О поступает также на устройство 3 управления скоростью ма ВУ 1829 С 1шины, которое на сигнал логического 0 Не реагирует. С запомш-гающего элемента 91 сигнал логического 0 поступает на элемент ИЛИ 5 и затем на элемент НЕ б. На выходе элемента НЕ 6 формируется сшнап логической 1, который поступает на индикатор 15 и устройство 3 управления скоростью машины. Индикатор 15 сигнализирует о том, что деформации рабочих органов Ниже допустимого уровня, устройство 3 начинает увеличивать скорость машины.Если хотя бы в ОДНОЙ ТОЧКВ КОНТРОЛЯ деформация достигла нижней границы допустимого уровня, то срабатывает релейный элемент 81 канала измерения, контролирующего эту точку. С релейного элемента 81 сигнал лопгческой 1 поступает на запоминающий элемент 91, где запомипается. Одновременно запускается элемент временной задержки 101. С запоминающего элемента 91 сигнал логической 1 поступает на логический элемент ИЛИ 5 и затем на элемент НЕ б. На выходе элемента НЕ 6 формируется сигнал логического О, который поступает на индикатор 15 индикаторного устройства. Индикатор 15 вьпглючается. Сигнал логического О также поступает на устройство 3 управления скоростью машины. По сигналу логического О устройство 3 прекращает увеличение скорости машины. Если через время, меньшее времени задержки,релейный элемент 81 снова срабатывает, ТО Элемент временной задеряжи 101 запуркается снова и сигнал логического О продолжает поступать на индикаторное устройство 2 и устройство 3 управления скоростью машины. Если деформации рабочего органа стали меньше допустимого уровня, то через время задержки на выходе элемента 101 появится сигнал, который поступает на вход сброса памяти запоминающего элемента 91. После этого устройство начнет работать в режиме, когда деформация не достигла нижней границы допустимого уровня.Если хотя бы в одной точке контроля деформация достигла верхней грангщьг допустимого уровня, то срабатывают релейные элементы 8 и 81 канала измерения, контролирующего эту точку. Работа устройства при срабатывают релейного элемента 81 описана выше. При срабатываьши релейшого элемента 8 сигнал логической 1 Поступает на запоминающий элемент 9, где запоминается. Одновременно запускается элемент временной задержки 10. С запоминающего элемента 9 сигнал логической 1 поступает на логичесгшй элемент ИЛИ 4. На выходе элемента ИЛИ 4 формируется сигнал логической 1, который поступает на индикатор 14 шщшсаторного устройства 2. Иншишатор 14 вкшочается, сигнализируя о том, что деформации рабочего органа превысили допустимый уровень. Одновременно сигнал логической 1 поступает на устройство 3 управления скоростью, которое начитает умешэшать скорость мапшны. Еслш через врем, меньшее времени задержки, релейный элемент 8 снова сработает, то элемент временной задержки 10 запускается снова и сигнал логической 1 продолжает поступать на индгишатор 14 и устройство 3 управления скоростью. Скорость машины уменьшается до тех пор, пока деформация рабочих органов больше верхней грангщы допустимого уровня. Когда деформация стала меньше верхней границы допустимого уровня, релейт-гьгй элемент 8 в очередной раз не срабатывает и сигнал с элемента 10 временной задержки поступает на вход сброса памяти запошшающего элемента 9. Сигнал запоминающего элемента 9 обнуляется, индггшатор 14 вьпстггочается, уменьшение скоростшмацшг-ы прекращается.В более простом исполнении, при отсутствии устройства управления скоростью, оператор осуществляет контроль деформации рабочих органов по показаниям индикаторов и при необходимости изменяет скорость магшгны. Составитель Е.В. Федоров Редактор В.Н. Позняк Корректор Т.Нэ НикитинаЗаказ 7017 Тираж 20 экз. Государственный патентный комитет Республики Беларусь. 220072, г. Минск. проспект Ф- СКОРИНЫ, 65
МПК / Метки
МПК: A01M 7/00
Метки: удобрения, управления, веществ, ядохимикатов, внесения, штанговым, органом, сельскохозяйственной, устройство, машиной, других, рабочим
Код ссылки
<a href="https://by.patents.su/4-1829-ustrojjstvo-upravleniya-selskohozyajjstvennojj-mashinojj-so-shtangovym-rabochim-organom-dlya-vneseniya-udobreniya-yadohimikatov-i-drugih-veshhestv.html" rel="bookmark" title="База патентов Беларуси">Устройство управления сельскохозяйственной машиной со штанговым рабочим органом для внесения удобрения, ядохимикатов и других веществ</a>
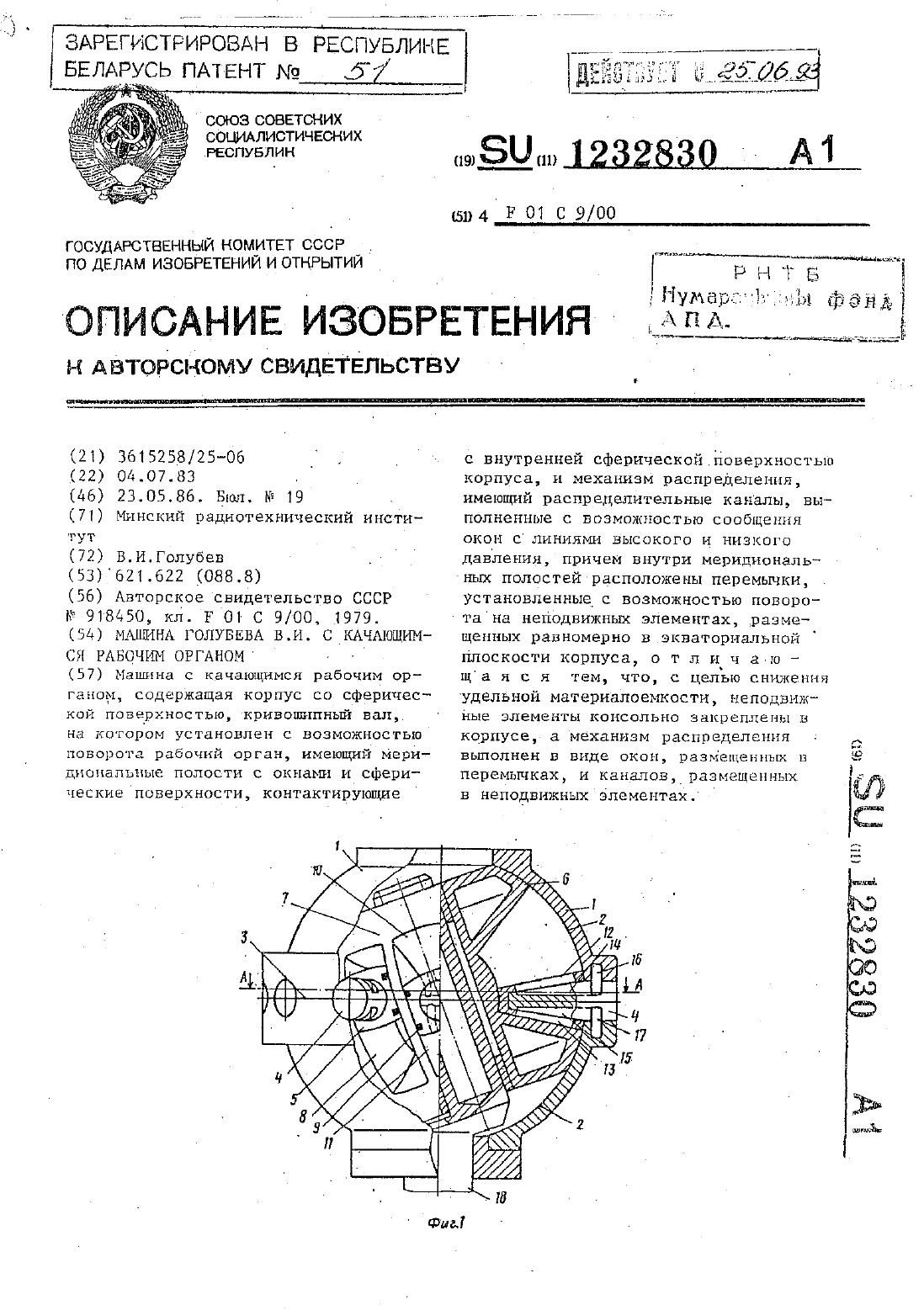
Машина Голубева В. И. с качающимся рабочим органом
Номер патента: 51
Опубликовано: 30.09.1994
Автор: Голубев Владимир Иосифович
МПК: F01C 9/00
Метки: качающимся, голубева, органом, рабочим, машина
Текст:
....На фиг. 1 изображена машина с качающимся рабочим органом на фиг.2 разрез АА на фиг. 1 на фиг 3 печ ремычка и неподвижный элемент, поперечньй разрез.МЗЦННЕ С КЗЧЗЮЪЦИЙСН рабочим органом содержит корпус 1 с внутренней сферической поверкноствю 2. По экватору 3 корпуса 1 нанеподвижных злее ментах 4, выполненным в виде консоль но закреппенны в корпусе-1 осей, ус тановлены с возможностью поворотапе ремычки 5 Машина содержит также ран бочий...
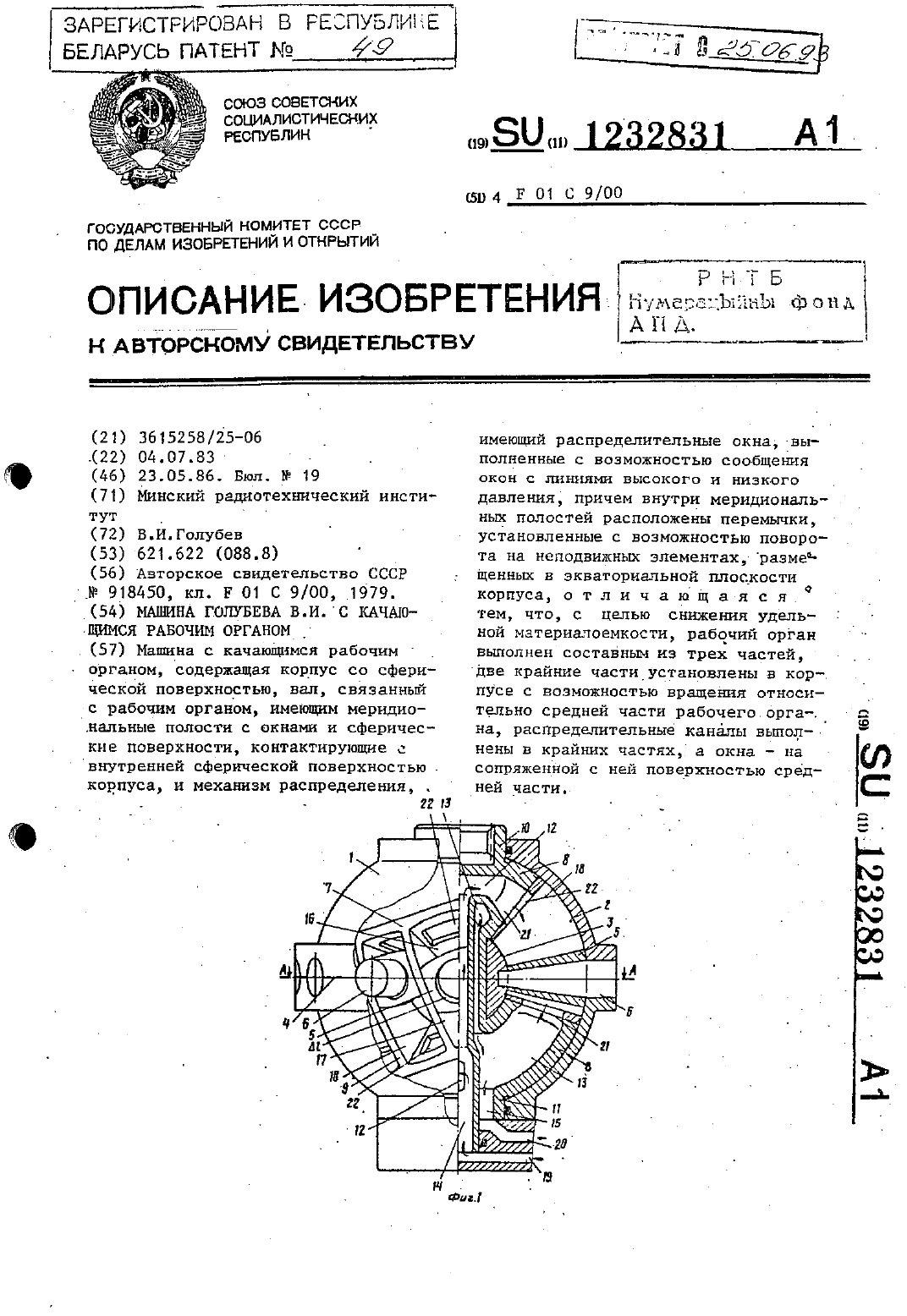
Машина Голубева В. И. с качающимся рабочим органом
Номер патента: 49
Опубликовано: 30.05.1994
Автор: Голубев Владимир Иосифович
МПК: F01C 9/00
Метки: рабочим, органом, машина, качающимся, голубева
Текст:
...ЭЛЕМЕНТЕХ 6, выопненны в виде осей, закрепленны в корпусе. Машина содержит также рабочий орган 7, вьшолненны составным из трех частей, причем двецелое или жестко скреплены одна с другой и установлены в корпусе 1 с возможностью вращения относительно средней части 9. Крайние части 8 имеютпапфы 10 и 11, с помощью коточ рык он установлены в корпусе.В крайШСС ЧЗСТЯХ В БЬШОЛНЕНЫ РЗСПРЭДЕПН тельные каналы 12-15 для подвода и отвода...
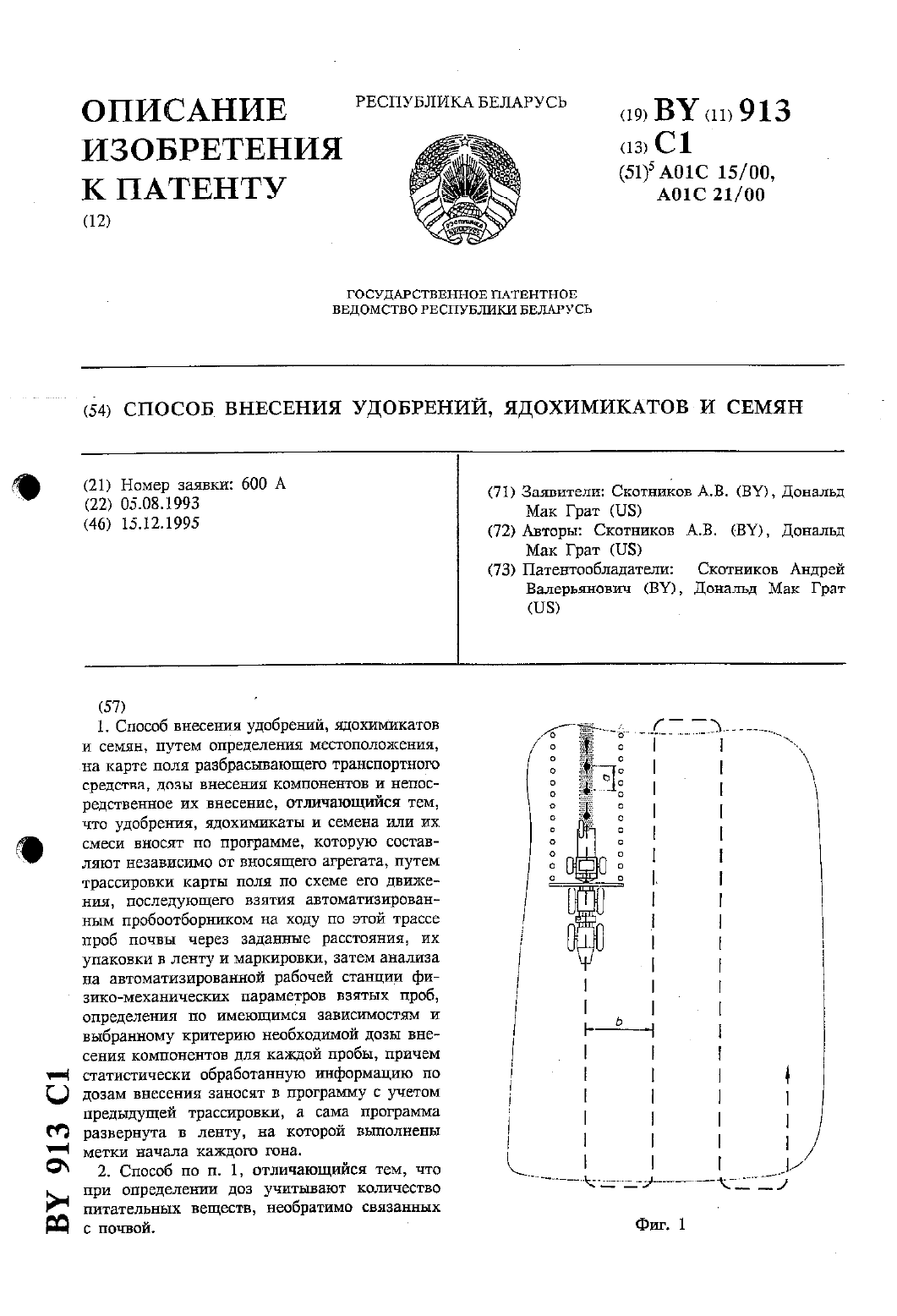
Способ внесения удобрений, ядохимикатов и семян
Номер патента: 913
Опубликовано: 15.12.1995
Авторы: Дональд Мак Грат, Скотников Андрей Валерьянович
МПК: A01C 15/00, A01C 21/00
Метки: ядохимикатов, внесения, семян, способ, удобрений
Текст:
...для взятия проб почвы из пахотного горизонта на ходу в автоматическом режиме. АПП агрегатируетсн с мобильным средством 1 (фиг. 2) с пенным маркером 2 и штангами 3, имеющим системы гидро и электропитания.АПП состоит из одноосной прицепной тележки 4 (фиг. 3), механизма взятия проб 5, механизма упаковки проб б, емкостей для накопления упакованных проб 7, следоуказателя 8, системы управления и сигнализации.Прицепная тележка 4 представляет собой...
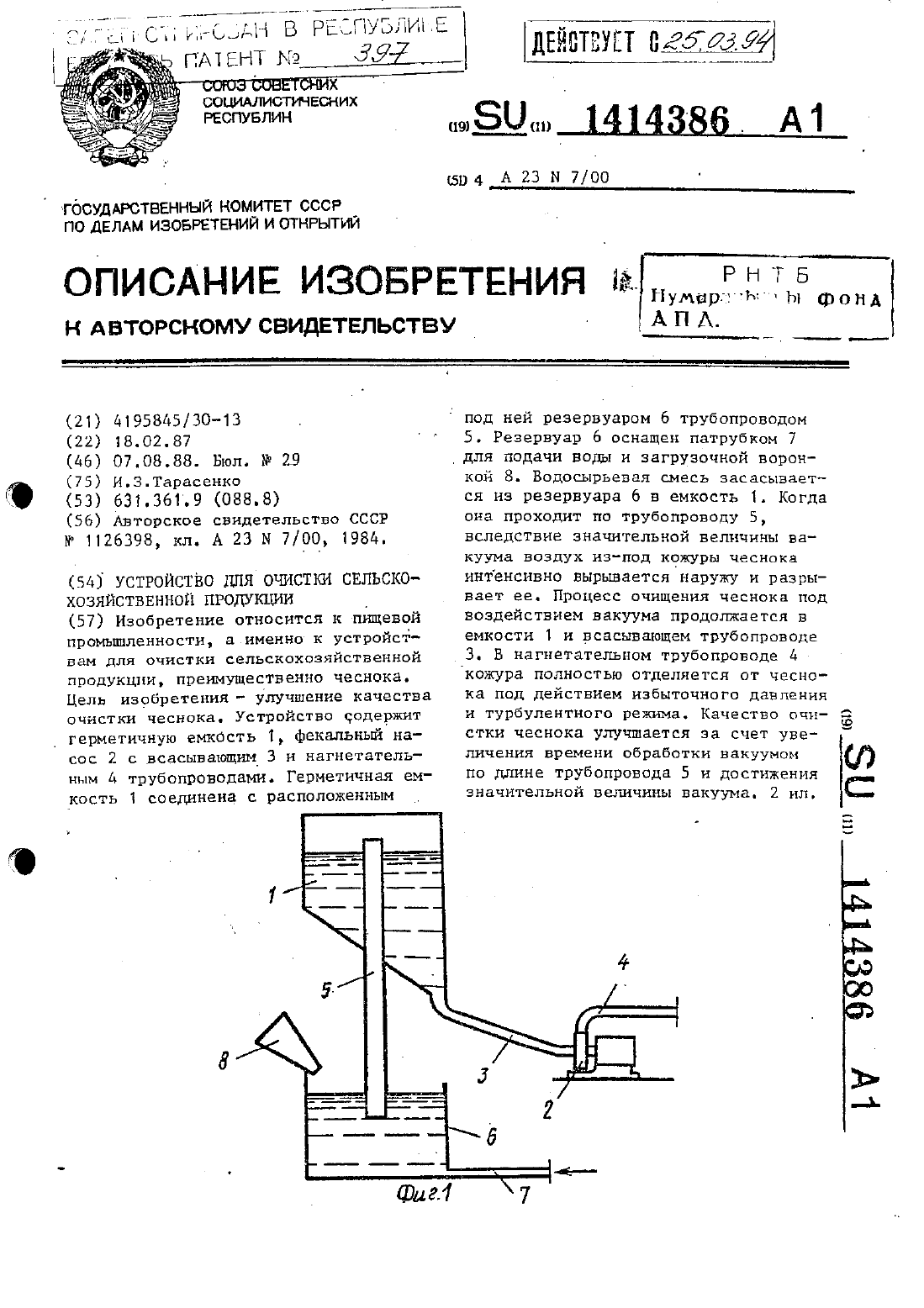
Устройство для очистки сельскохозяйственной продукции
Номер патента: 397
Опубликовано: 30.03.1995
Автор: Тарасенко Игорь Захарович
МПК: A23N 7/00
Метки: очистки, сельскохозяйственной, продукции, устройство
Текст:
...на уровне конца - 35 трубопровода 5. Насос 2 через всасывающий трубопровод 3 также заливается водой. Чеснок поступает в резервуар 6 через загрузочную воронку 8. При вклчении фекального насоса 2 40вода из емкости 1 по всасывающемутрубопроводу З перекачивается в нагнетательньй трубопровод 4. При этом уровень воды в емкости 1 пониается образуется вакуум И водосырьевая 45 смесь засасывается пб трубопроводу 5Проходя по трубопроводу 5, вслед 50...
Способ измерения влажности вязких и сыпучих веществ и устройство для его осуществления
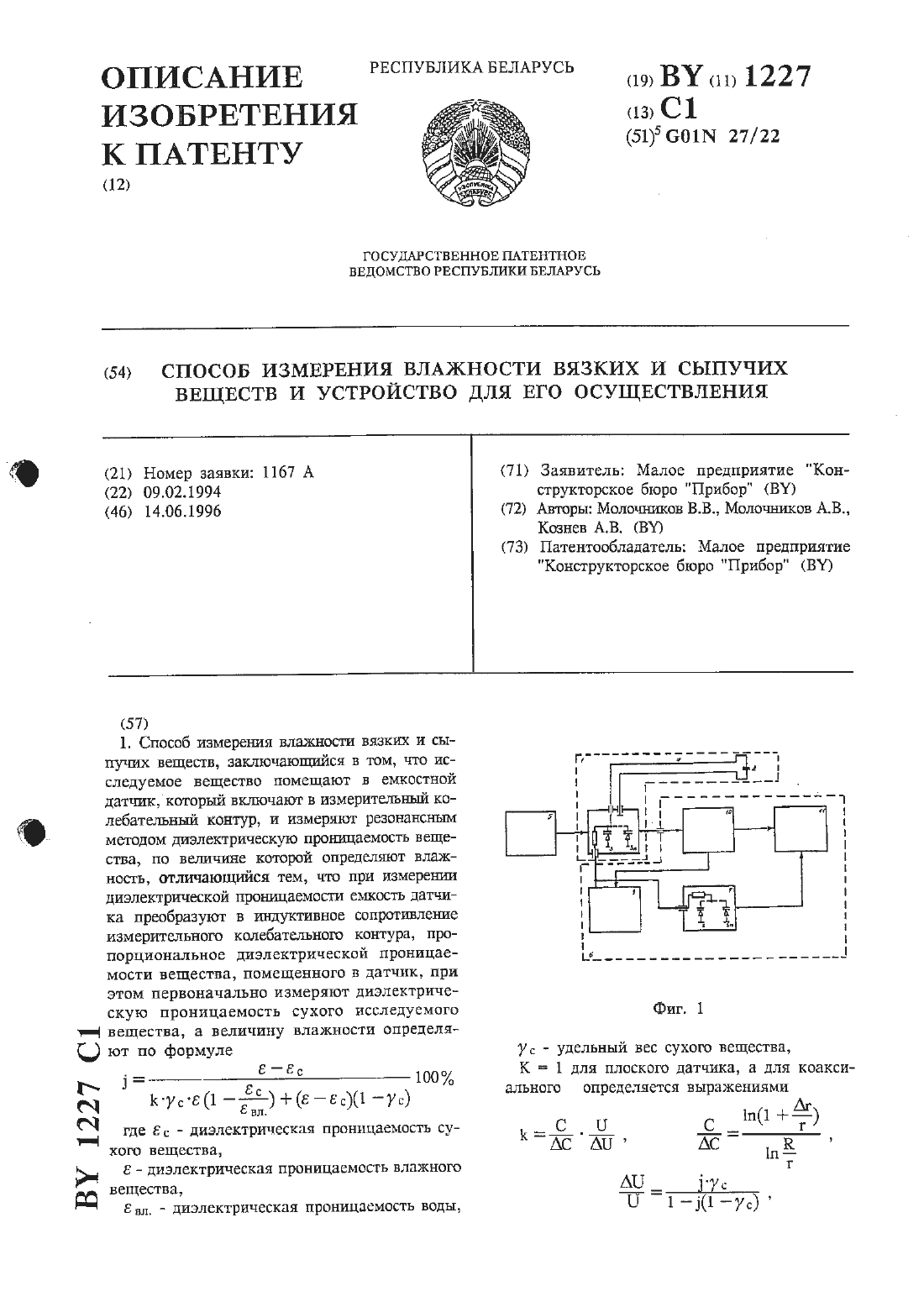
Номер патента: 1227
Опубликовано: 14.06.1996
Авторы: Кознев Александр Васильевич, Молочников Виктор Викторович, Молочников Александр Викторович
МПК: G01N 27/22
Метки: сыпучих, способ, влажности, веществ, осуществления, устройство, вязких, измерения
Текст:
...- удельный вес сухого веществагде П объем влажного вещества в датчикеАС - емкость с воздушным диэлектриком участка датчика П, заполненного водойг, К радиусы внутреннего и внешнего электродов коаксиального датчика.В устройстве для осуществления способа измерения влажности вязких и сыпучих веществ,содержащем емкостной датчик, включенный в измерительный колебательный контур с п электрически перестраиваемыми емкостями,генератор высокой...
Предыдущий патент: Водонагреватель
Следующий патент: Способ получения волокнистых нетканых материалов
Случайный патент: Способ изготовления бумаги или картона с применением бинарной системы удержания