Люлька самоподъемная монтажная

Текст
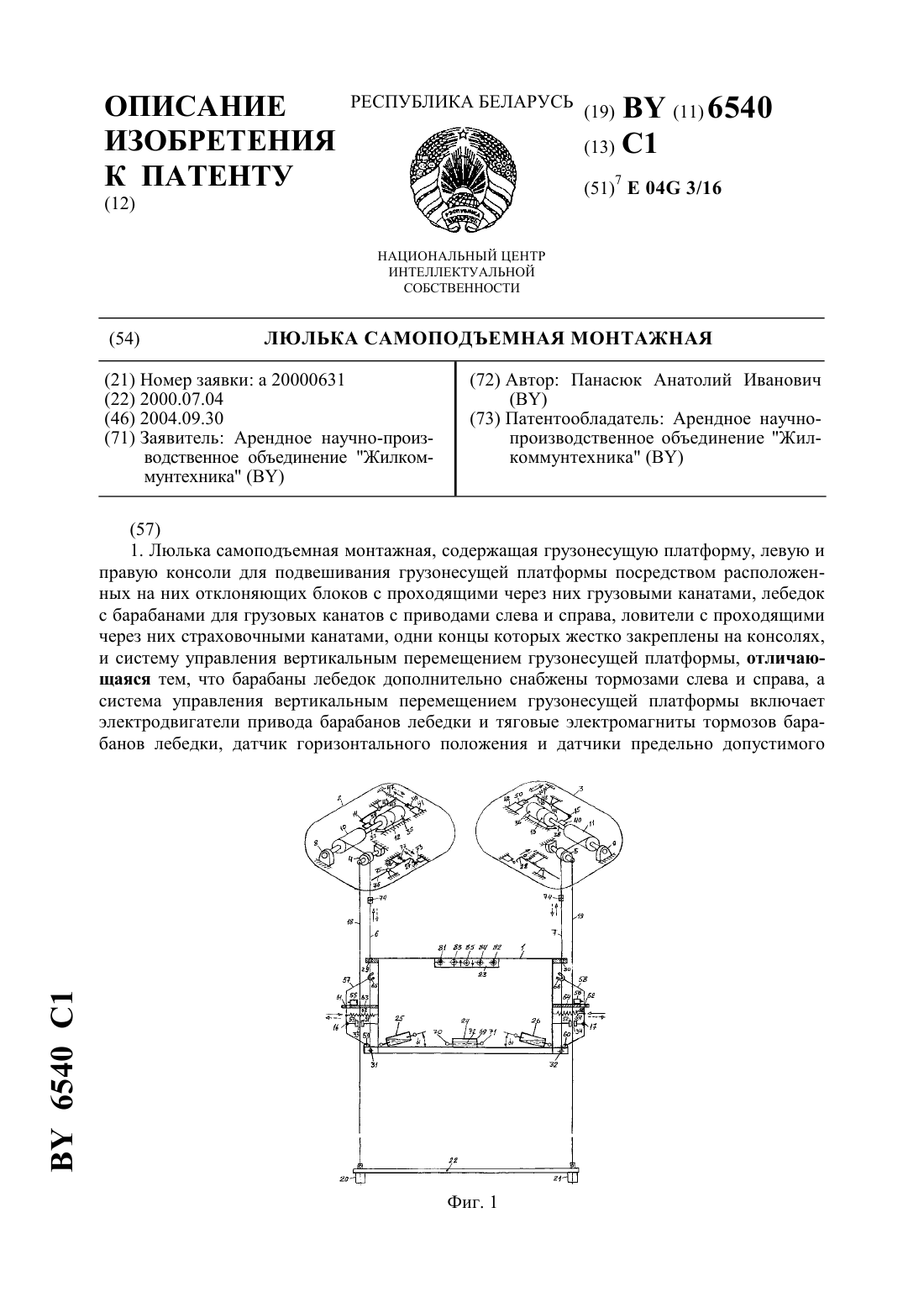
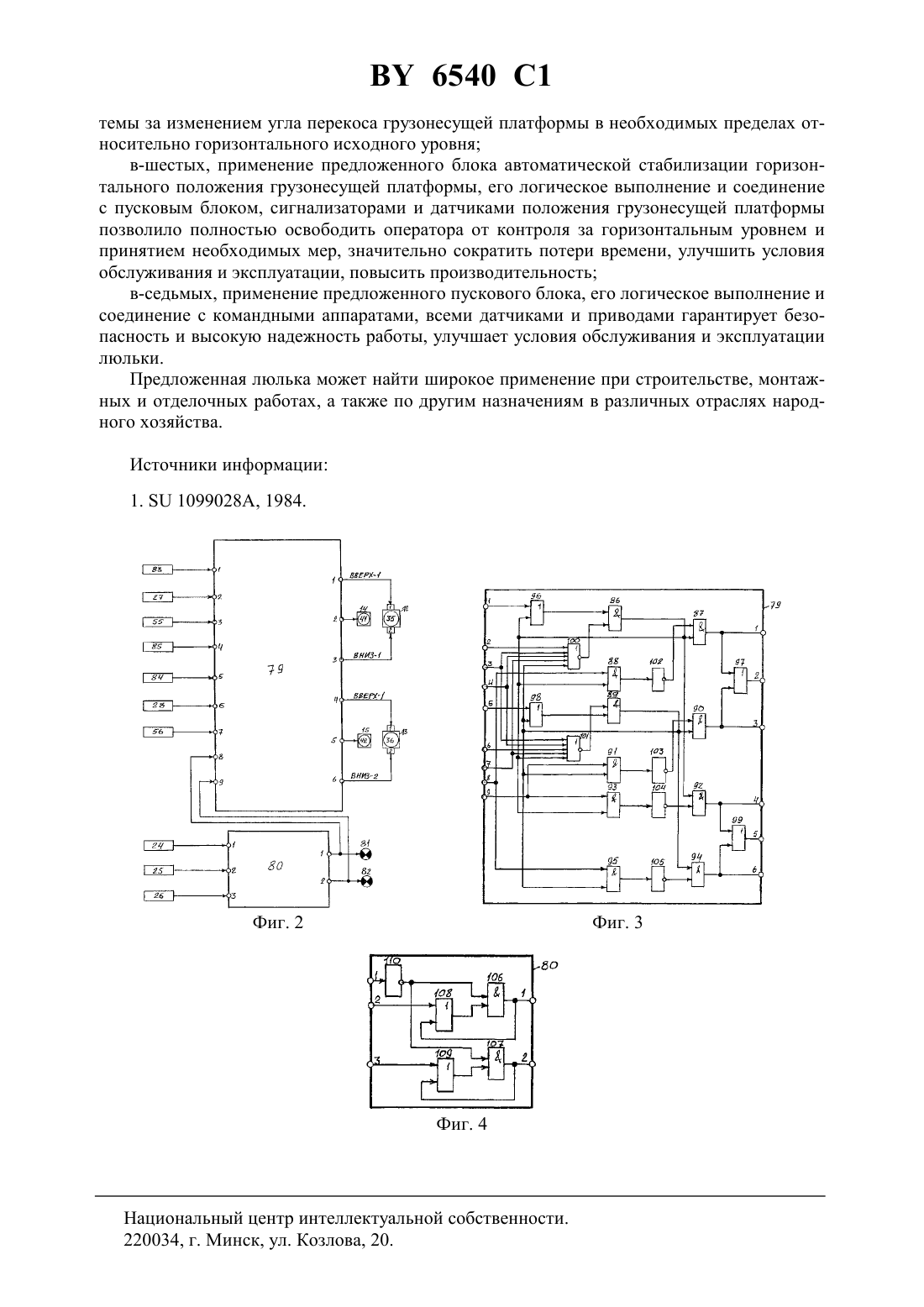
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(72) Автор Панасюк Анатолий Иванович(73) Патентообладатель Арендное научнопроизводственное объединение Жилкоммунтехника(57) 1. Люлька самоподъемная монтажная, содержащая грузонесущую платформу, левую и правую консоли для подвешивания грузонесущей платформы посредством расположенных на них отклоняющих блоков с проходящими через них грузовыми канатами, лебедок с барабанами для грузовых канатов с приводами слева и справа, ловители с проходящими через них страховочными канатами, одни концы которых жестко закреплены на консолях,и систему управления вертикальным перемещением грузонесущей платформы, отличающаяся тем, что барабаны лебедок дополнительно снабжены тормозами слева и справа, а система управления вертикальным перемещением грузонесущей платформы включает электродвигатели привода барабанов лебедки и тяговые электромагниты тормозов барабанов лебедки, датчик горизонтального положения и датчики предельно допустимого 6540 1 приподнятого левого и правого краев грузонесущей платформы, датчики ограничения хода платформы ВВЕРХ слева и справа, датчики обрыва грузовых канатов слева и справа,пусковой блок, блок автоматической стабилизации горизонтального положения грузонесущей платформы, сигнализаторы приподнятого левого и правого краев платформы,кнопки ВВЕРХ, ВНИЗ и СТОП, при этом первый вход пускового блока соединен с кнопкой ВВЕРХ, второй вход - с датчиком ограничения хода платформы ВВЕРХ слева, третий вход - с датчиком обрыва грузового каната слева, четвертый вход - с кнопкой СТОП, пятый вход - с кнопкой ВНИЗ, шестой вход - с датчиком ограничения хода платформы ВВЕРХ справа, седьмой вход - с датчиком обрыва грузового каната справа,восьмой вход - с сигнализатором приподнятого левого края платформы и первым выходом блока автоматической стабилизации горизонтального положения грузонесущей платформы,девятый вход - с сигнализатором приподнятого правого края платформы и вторым выходом блока автоматической стабилизации горизонтального положения платформы, первый выход - с первым входом привода барабана лебедки слева, второй выход - с входом тормоза барабана лебедки слева, третий вход - со вторым входом привода барабана лебедки слева, четвертый выход - с первым входом привода барабана лебедки справа, пятый выход входом тормоза барабана лебедки справа, шестой выход - со вторым входом привода барабана лебедки справа, а первый вход блока автоматической стабилизации горизонтального положения грузонесущей платформы соединен с датчиком горизонтального положения грузонесущей платформы, второй вход - с датчиком предельно допустимого приподнятого левого края грузонесущей платформы, а третий вход - с датчиком предельно допустимого приподнятого правого края грузонесущей платформы, причем датчик горизонтального положения расположен посередине платформы параллельно ее днищу, а датчики предельно приподнятого левого и правого краев расположены соответственно на левом и правом краях грузонесущей платформы встречно под предельно допустимым углом. 2. Люлька по п. 1, отличающаяся тем, что каждый из датчиков положения грузонесущей платформы выполнен в виде герметически закрытой емкости из электроизоляционного материала, например, в виде продольной ампулы из стекла с вмонтированными по торцам электродами и заполненной немного больше половины внутреннего объема токопроводящей жидкостью, например ртутью. 3. Люлька по п. 1, отличающаяся тем, что каждый из датчиков ограничения хода платформы ВВЕРХ содержит чувствительный элемент, воздействующий элемент и закрепленный посредством шарнира промежуточный двуплечевой рычаг, одно плечо которого соединено с возвратной пружиной, снабжено ограничительным упором и выполнено с возможностью взаимодействия с чувствительным элементом при соприкосновении второго свободного плеча с взаимодействующим элементом, закрепленным на соответствующем грузовом канате. 4. Люлька по п. 1, отличающаяся тем, что пусковой блок включает в себя десять элементов И, четыре элемента ИЛИ, два элемента ИЛИ-НЕ и четыре элемента НЕ, причем в пусковом блоке первый вход соединен с первым входом первого элемента ИЛИ, выход которого соединен с первым входом первого элемента И, второй вход в пусковом блоке соединен с первым входом первого элемента ИЛИ-НЕ, выход которого соединен со вторым входом первого элемента И, третий вход в пусковом блоке соединен со вторым входом первого элемента ИЛИ-НЕ и первым входом второго элемента ИЛИ-НЕ, выход которого соединен с первым входом четвертого элемента И, четвертый вход в пусковом блоке соединен с третьим входом первого элемента ИЛИ-НЕ и вторым входом второго элемента ИЛИ-НЕ, пятый вход - с первым входом третьего элемента ИЛИ, выход которого соединен со вторым входом четвертого элемента И, шестой вход в пусковом блоке соединен с третьим входом второго элемента ИЛИ-НЕ, седьмой вход - с четвертым входом первого и второго элементов ИЛИ-НЕ, восьмой вход - с первыми входами третьего и десятого элементов И, девятый вход - с первыми входами шестого и восьмого элементов И,2 6540 1 первый выход в пусковом блоке соединен с первым входом второго элемента ИЛИ и выходом второго элемента И, первый вход которого через первый элемент НЕ соединен с выходом третьего элемента И, а второй вход второго элемента И - с первым входом седьмого элемента И, вторым входом первого элемента ИЛИ, вторыми входами третьего и восьмого элементов И, пятым входом второго элемента ИЛИ-НЕ и выходом первого элемента И, второй выход в пусковом блоке соединен с выходом второго элемента ИЛИ, третий выход - со вторым входом второго элемента ИЛИ и выходом пятого элемента И,первый вход которого через второй элемент НЕ соединен с выходом шестого элемента И,а второй вход - с первым входом девятого элемента И, вторым входом третьего элемента ИЛИ, вторыми входами шестого и десятого элементов И, пятым входом первого элемента ИЛИ-НЕ и выходом четвертого элемента И, четвертый выход в пусковом блоке соединен с первым входом четвертого элемента ИЛИ и выходом седьмого элемента И, второй вход которого через третий элемент НЕ соединен с выходом восьмого элемента И, пятый выход в пусковом блоке соединен с выходом четвертого элемента ИЛИ, шестой выход - со вторым входом четвертого элемента ИЛИ и выходом девятого элемента И, второй вход которого через четвертый элемент НЕ соединен с выходом десятого элемента И. 5. Люлька по п. 1., отличающаяся тем, что блок автоматической стабилизации горизонтального положения платформы включает в себя два элемента И, два элемента ИЛИ и один элемент НЕ, причем в блоке автоматической стабилизации горизонтального положения платформы первый вход через элемент НЕ соединен с первыми входами первого и второго элементов И, второй вход - с первым входом первого элемента ИЛИ, третий вход с первым входом второго элемента ИЛИ, первый выход - со вторым входом первого элемента ИЛИ и выходом первого элемента И, второй вход которого соединен с выходом первого элемента ИЛИ, второй выход - со вторым входом второго элемента ИЛИ и выходом второго элемента И, второй вход которого соединен с выходом второго элемента ИЛИ.(56)903527, 1982.1099028 , 1984.2047713 1, 1995.2074299 1, 1997.2083781 1, 1997.2115787 1, 1998.3824921 1, 1990.0486126 2, 1992. Изобретение относится к устройствам, применяемым при строительстве, монтажных и отделочных работ, а именно к подвесным люлькам. Известна люлька самоподьемная, содержащая грузонесущую платформу, консоли для подвешивания грузонесущей платформы посредством грузовых канатов, консоли для подвешивания грузонесущей платформы посредством грузовых канатов и отклоняющих блоков, лебедки с приводами и барабанами для грузовых канатов и систему управления вертикальным перемещением грузовой платформы 1. Однако эта люлька имеет определенные недостатки. Во-первых, отсутствуют средства страховки (ловители) при обрыве грузовых канатов,что не гарантирует безопасность и надежность работы. Во-вторых, лебедки расположены непосредственно на грузонесущей платформе, что значительно увеличивает массу и уменьшает ее полезную грузоподьемность, снижает производительность и эффективность использования. 3 6540 1 В третьих, в системе управления отсутствуют средства ограничения хода платформы ВВЕРХ, поэтому возможны аварийные ситуации в результате ее столкновения с отклоняющими блоками и консолями, что снижает безопасность и надежность работы. В четвертых, предложенная система управления выравниванием длин канатов из-за неправильного подключения двух конечных выключателей и неправильного выполнения схемы электрической принципиальной является совершенно неработоспособной и становится источником следующих крайне недопустимых ситуаций. Так, например, в первом случае при равной длине канатов конечные выключатели 15(КВ 1. КВ 2) не вступают во взаимодействие с соответствующими толкателями 14, поэтому их нормально-открытые контакты являются разомкнутыми и они отключают от источника питания катушки промежуточных реле (РП 1, РП 2), при этом нормально-закрытые контакты реле (РП 1, РП 2) шунтируют нормально-открытые контакты кнопки (КВВ) ВВЕРХ и кнопки (КВН) ВНИЗ одновременно, что по условиям эксплуатации недопустимо, в результате чего также одновременно без ведома оператора подключаются к источнику питания катушки всех магнитных пускателей (ПМВ 1, ПМВ 2, ПМН 1, ПМН 2) и замыкаются их нормально-открытые контакты одновременно в цепях прямого реверсивного включения электродвигателей (Д 1, Д 2) приводом лебедок, после чего неизбежно происходит короткое замыкание и автоматические выключатели (АВ 1, АВ 2) мгновенно исключают возможность перемещения платформы ВВЕРХ и ВНИЗ с помощью электропривода(фиг. 3). Во втором случае, при неравной длине канатов один конечный выключатель (например, КВ 1) вступает во взаимодействие с соответствующим толкателем 14 и замыкается его нормально-открытый контакт, который подключает к источнику питания катушку промежуточного реле (РП 1), в результате чего размыкаются его нормально-замкнутые контакты (фиг. 3) и мгновенно отключается от источника питания собственная катушка этого реле (РП 1). После этого нормально-замкнутые контакты реле (РП 1) возвращаются в исходное замкнутое положение и повторно подключают собственную катушку к источнику питания, то есть промежуточное реле (РП 1) будет непрерывно включаться и тут же мгновенно отключаться, создавая звуковой эффект пулеметной очереди, после чего оно непременно сгорит, а электродвигатель (Д 1) будет не в состоянии включиться и люлька останется неподвижной (фиг. 3). Что касается электродвигателя (Д 2) в этой ситуации, то в нем аналогично первому случаю произойдет короткое замыкание и с помощью автоматического выключателя(АВ 2) отключится система его управления и люлька останется неподвижной (фиг. 3). Известна люлька самоподьемная монтажная, содержащая грузонесущую платформу,консоли для подвешивания грузонесущей платформы посредством грузовых канатов и отклоняющих блоков, лебедки с приводами и барабанами для грузовых канатов, ловители и систему управления вертикальным перемещением грузонесущей платформы 2. В этой люльке лебедки расположены непосредственно на консолях, что облегчает грузонесущую платформу и увеличивает ее полезную грузоподъемность. Эта люлька является самой близкой к изобретению по ее технической сущности и достигаемому результату. К недостаткам этой люльки относится то, что в ней также отсутствуют средства ограничения хода платформы ВВЕРХ, средства контроля обрыва грузовых канатов и средства устранения перекоса грузовой платформы, что в недостаточной степени гарантирует безопасность и надежность работы, усложняет условия обслуживания и эксплуатации,увеличивает потери времени и снижает производительность. Задачей изобретения является повышение безопасности и надежности работы, улучшение условий обслуживания и эксплуатации, уменьшение потерь времени и увеличение производительности. 4 6540 1 Поставленная задача решается за счет того, что в предлагаемой люльке самоподъемной монтажной, содержащей грузонесущую платформу, левую и правую консоли для подвешивания грузонесущей платформы посредством расположенных на них отклоняющих блоков с проходящими через них грузовых канатов, лебедок с барабанами для грузовых канатов с приводами слева и справа, ловители с проходящими через них страховочными канатами, одни концы которых жестко закреплены на консолях, систему управления вертикальным перемещением грузонесущей платформы, в соответствии с изобретением, барабаны лебедок дополнительно снабжены тормозами слева и справа, а система управления вертикальным перемещением грузонесущей платформы включает электродвигатели привода барабанов и тяговые электромагниты тормозов барабанов лебедки, датчики горизонтального положения и датчики предельно допустимого приподнятого левого и правого краев платформы, датчики ограничения хода платформы ВВЕРХ слева и справа, датчики обрыва грузовых канатов, пусковой блок, блок автоматической стабилизации горизонтального положения грузонесущей платформы, сигнализаторы приподнятого левого и правого краев платформы, кнопки ВВЕРХ, ВНИЗ и СТОП, при этом первый вход пускового блока соединен с кнопкой ВВЕРХ, второй вход - с датчиком ограничения хода платформы ВВЕРХ слева, третий вход - с датчиком обрыва грузового каната слева,четвертый вход - с кнопкой СТОП, пятый вход - с кнопкой ВНИЗ, шестой вход - с датчиком ограничения хода платформы ВВЕРХ справа, седьмой вход - с датчиком обрыва грузового каната справа, восьмой вход - с сигнализатором приподнятого левого края платформы и первым выходом блока автоматической стабилизации горизонтального положения грузонесущей платформы, девятый вход - с сигнализатором приподнятого правого края платформы и вторым выходом блока автоматической стабилизации горизонтального положения платформы, первый выход - с первым входом привода барабана лебедки слева, второй выход - с входом тормоза барабана лебедки слева, третий выход - со вторым входом привода барабана лебедки слева, четвертый выход - с первым входом привода барабана лебедки справа, пятый выход - с входом тормоза барабана лебедки справа, шестой выход - со вторым входом привода барабана лебедки справа, а первый вход блока автоматической стабилизации горизонтального положения грузонесущей платформы соединен с датчиком горизонтального положения платформы, второй вход - с датчиком предельно допустимого приподнятого левого края платформы, а третий вход - с датчиком предельно допустимого приподнятого правого края платформы, причем датчик горизонтального положения расположен посредине платформы параллельно ее днищу, а датчики предельно приподнятого левого и правого краев расположены соответственно на левом и правом краях грузонесущей платформы встречно под предельно допустимым углом. Кроме того, каждый из датчиков положения грузонесущей платформы выполнен в виде герметически закрытой емкости из электроизоляционного материала, например, в виде продольной ампулы из стекла с вмонтированными по торцам электродами и заполненной немного больше половины внутреннего объема токопроводящей жидкостью, например ртутью. При этом каждый из датчиков ограничения хода платформы ВВЕРХ содержит чувственный элемент, воздействующий элемент и закрепленный посредством шарнира промежуточный двуплечий рычаг, одно плечо которого соединено с возвратной пружиной,снабжено ограничительным упором и выполнено с возможностью взаимодействия с чувствительным элементом при соприкосновении второго свободного плеча с воздействующим элементом, закрепленным на соответствующем грузовом канате. Пусковой блок включает в себя десять элементов И, четыре элемента ИЛИ, два элемента ИЛИ-НЕ и четыре элемента НЕ, причем в пусковом блоке первый вход соединен с первым входом первого элемента ИЛИ, выход которого соединен с первым входом первого элемента И, второй вход в пусковом блоке соединен с первым входом первого элемента 5 6540 1 ИЛИ-НЕ, выход которого соединен со вторым входом первого элемента И, третий вход в пусковом блоке соединен со вторым входом первого элемента ИЛИ-НЕ и первым входом второго элемента ИЛИ-НЕ, выход которого соединен с первым входом четвертого элемента И, четвертый вход в пусковом блоке соединен с третьим входом первого элемента ИЛИ-НЕ и вторым входом второго элемента ИЛИ-НЕ, пятый вход - с первым входом третьего элемента ИЛИ, выход которого соединен со вторым входом четвертого элемента И, шестой вход в пусковом блоке соединен с третьим входом второго элемента ИЛИ-НЕ,седьмой вход - с четвертыми входами первого и второго элементов ИЛИ-НЕ, восьмой вход - с первыми входами третьего и десятого элементов И, девятый вход - первыми входами шестого и восьмого элементов И, первый выход в пусковом блоке соединен с первым входом второго элемента ИЛИ и выходом второго элемента И, первый вход которого через первый элемент НЕ соединен с выходом третьего элемента И, а второй вход второго элемента И - с первым входом седьмого элемента И, вторым входом первого элемента ИЛИ, вторыми входами третьего и восьмого элементов И, пятым входом второго элемента ИЛИ-НЕ и выходом первого элемента И, второй выход в пусковом блоке соединен с выходом второго элемента ИЛИ, третий выход - со вторым входом второго элемента ИЛИ и выходом пятого элемента И, первый вход которого через второй элемент НЕ соединен с выходом шестого элемента И, а второй вход - с первым входом девятого элемента И, вторым входом третьего элемента ИЛИ, вторыми входами шестого и десятого элементов И,пятым входом первого элемента ИЛИ-НЕ и выходом четвертого элемента И, четвертый выход в пусковом блоке соединен с первым входом четвертого элемента ИЛИ и выходом седьмого элемента И, второй вход которого через третий элемент НЕ соединен с выходом восьмого элемента И, пятый выход в пусковом блоке соединен с выходом четвертого элемента ИЛИ, шестой выход - со вторым входом четвертого элемента ИЛИ и выходом девятого элемента И, второй вход которого через четвертый элемент НЕ соединен с выходом десятого элемента И. Блок автоматической стабилизации горизонтального положения платформы, использованный в люльке, включает в себя два элемента И, два элемента ИЛИ и один элемент НЕ, причем в блоке автоматической стабилизации горизонтального положения первый вход через элемент НЕ соединен с первыми входами первого и второго элементов И, второй вход - с первым входом первого элемента ИЛИ, третий вход - с первым входом второго элемента ИЛИ, первый выход - со вторым входом первого элемента ИЛИ и выходом первого элемента И, второй вход которого соединен с выходом первого элемента ИЛИ,второй выход - со вторым входом второго элемента ИЛИ и выходом второго элемента И,второй вход которого соединен с выходом второго элемента ИЛИ. На основании приведенных данных и сопоставления заявляемого объекта с аналогом и прототипом видно, что предложенное техническое решение соответствует критерию изобретательский уровень и является новым, а его промышленная применимость подтверждается приведенным ниже подробным описанием устройства и принципа работы люльки самоподъемной монтажной. На фиг. 1 изображена кинематическая схема предлагаемой люльки самоподъемной монтажной на фиг. 2 - блок схема системы управления вертикальным перемещением грузонесущей платформы, на фиг. 3 - логическая схема пускового блока на фиг. 4 - логическая схема блока автоматической стабилизации горизонтального положения грузонесущей платформы. Предлагаемая люлька самоподъемная монтажная содержит грузонесущую платформу 1,левую 2 и правую 3 консоли для подвешивания грузонесущей платформы посредством расположенных на них отклоняющих блоков 4 и 5 с проходящими через них грузовых канатов 6 и 7, лебедок 8 и 9 с барабанами 10 и 11 для рабочих канатов с приводами 12 слева и 13 справа и тормозами 14 и 15 ловители 16 и 17 с проходящими через них страховочными канатами 18 и 19, одни концы которых закреплены на консолях 2 и 3, натяженными 6 6540 1 грузами 20 и 21 на траверсе 22 пульт 23 системы управления вертикальным перемещением грузонесущей платформы. На грузонесущей платформе 1 расположены пульт 23, ловители 16 и 17, датчик 24 горизонтального положения и датчики предельно допустимого приподнятого 25 левого и 26 правого краев платформы. Консоли 2 и 3 крепятся преимущественно на крышах зданий и на них располагаются отклоняющие блоки 4 и 5, лебедки 8 и 9 с полным комплектом входящего в них оборудования, а также датчики 27 и 28 ограничения хода платформы ВВЕРХ. В грузовых канатах 6 и 7 одни концы закреплены на барабанах 10 и 11, а вторые концы проходят через отклоняющие блоки 4 и 5, отверстия втулок 29 и 30 в верхней части грузонесущей платформы 1, а в нижней части закреплены болтовыми соединениями 31 и 32. В страховочных канатах 18 и 19 одни концы жестко закреплены на консолях 2 и 3, а вторые проходят через зазоры 33 и 34 в ловителях 16 и 17 и соединены с натяжными грузами 20 и 21 на траверсе 22. Приводы 12 и 13 включают в себя электродвигатели 35 и 36 и они соединены с барабанами 10 и 11 общими валами 37 и 38. Тормоза 14 и 15 состоят из контактных колодок 39 и 40, тяговых электромагнитов 41 и 42 и закрепленных посредством шарниров 43 и 44 двуплечих рычагов 45 и 46, одни плечи которых соединены с контактными колодками 39 и 40, плотно охватывающими общие валы 37 и 38, а вторые плечи соединены с прижимными пружинами 47 и 48 и сердечниками 49 и 50 тяговых электромагнитов 41 и 42, усилие которых превышает усилие прижимных пружин. Ловители 16 и 17 состоят из неподвижных упоров 51 и 52, толкателей 53 и 54 для прижима страховочных канатов 18 и 19 к неподвижным упорам 51 и 52, датчиков 55 и 56 обрыва грузовых канатов 6 и 7 и следящих рычагов 57 и 58, контролирующих натяжение грузовых канатов 6 и 7, причем в рычагах 57 и 58 нижние концы закреплены посредством шарниров 59 и 60, верхние концы размещены в горизонтальных пазах 61 и 62 ограничителей 63 и 64 их хода и соприкасаются с грузовыми канатами 6 и 7 посредством охватывающих их вилками 65 и 66, а в промежутке между нижними и верхними концами перпендикулярно расположены и жестко закреплены толкатели 53 и 54, а также закреплены силовые пружины 67 и 68, при этом датчики 55 и 56 расположены на ограничителях 63 и 64 с возможностью взаимодействия со следящими рычагами 57 и 58 при ослаблении или обрыве грузовых канатов 6 и 7. Каждый из датчиков 24, 25, 26 выполнен в виде герметически закрытой емкости 69 из электроизоляционного материала, например, в виде продольной ампулы из стекла с вмонтированными по торцам электродами 70 и 71 и заполненной немногим более половины внутреннего объема токопроводящей жидкости 72, например ртути, причем датчик 24 расположен горизонтально посередине параллельно днищу платформы 1, а датчики 25 и 26 расположены соответственно на левом и правом краях платформы 1 встречно под предельно допустимым угломперекоса. Каждый из датчиков 27 и 28 состоит из чувствительного элемента 73, воздействующего элемента 74 и закрепленного посредством шарнира 75 промежуточного двуплечего рычага 76, одно плечо которого соединено с возвратной пружиной 77, снабжено ограничительным упором 78 и выполнено с возможностью взаимодействия с чувствительным элементом 73 при соприкосновении второго свободного плеча с воздействующим элементом 74, закрепленным на соответствующем грузовом канате. Система управления включает в себя электродвигатели 35 и 36 привода барабанов и тяговые электромагниты 41 и 42 тормозов лебедок, датчик 24 горизонтального положения и датчики предельно допустимого приподнятого 25 левого и 26 правого краев платформы 1,датчики 27 и 28 ограничения хода платформы ВВЕРХ, датчики 55 и 56 обрыва грузовых канатов 6 и 7, пусковой блок 79, блок 80 автоматической стабилизации горизонтального 7 6540 1 положения платформы, сигнализаторы приподнятого 81 левого и 82 правого краев платформы, а также кнопки 83 ВВЕРХ, 84 ВНИЗ и 85 СТОП, при этом первый вход пускового блока 79 соединен с кнопкой 83 ВВЕРХ, второй вход - с датчиком 27 ограничения хода платформы ВВЕРХ слева, третий вход - с датчиком 55 обрыва грузового каната слева, четвертый вход - с кнопкой 85 СТОП, пятый вход - с кнопкой 84 ВНИЗ, шестой вход - с датчиком 28 ограничения хода платформы ВВЕРХ справа,седьмой вход - с датчиком 56 обрыва грузового каната справа, восьмой вход - с сигнализатором 81 приподнятого левого края платформы и первым выходом блока 80 автоматической стабилизации горизонтального положения грузонесущей платформы, девятый вход с сигнализатором 82 приподнятого правого края платформы и вторым выходом блока 80 автоматической стабилизации горизонтального положения платформы, первый выход - с первым входом привода 12, второй выход - с входом тормоза 14, третий выход - со вторым входом привода 12, четвертый выход - с первым входом привода 13, пятый выход - с входом тормоза 15, шестой выход - со вторым входом привода 13, а первый вход блока 80 соединен с датчиком 24 горизонтального положения грузонесущей платформы, второй вход - с датчиком 25 приподнятого левого края платформы, третий вход - с датчиком 26 приподнятого правого края грузонесущей платформы. Пусковой блок 79 включает в себя элементы 86, 87, 88, 89, 90, 91, 92, 93, 94, 95 И, элементы 96, 97, 98, 99 ИЛИ, элементы 100, 101 ИЛИ-НЕ и элементы 102, 103, 104, 105 НЕ,причем в пусковом блоке первый вход соединен с первым входом элемента 96 ИЛИ, выход которого соединен с первым входом элемента 86 И, второй вход в пусковом блоке 79 соединен с первым входом элемента 100 ИЛИ-НЕ, выход которого соединен со вторым входом элемента 86 И, третий вход в пусковом блоке 79 соединен со вторым входом элемента 100 ИЛИ-НЕ и первым входом элемента 101 ИЛИ-НЕ, выход которого соединен с первым входом элемента 89 И, четвертый вход в пусковом блоке соединен с третьим входом элемента 100 ИЛИ-НЕ и вторым входом элемента 101 ИЛИ-НЕ, пятый вход - с первым входом элемента 98 ИЛИ, выход которого соединен со вторым входом элемента 89 И,шестой вход в пусковом блоке 79 соединен с третьим входом элемента 101 ИЛИ-НЕ,седьмой вход - с четвертыми входами элементов 100, 101 ИЛИ-НЕ восьмой вход - с первыми входами элементов 88, 95 И, девятый вход - с первыми входами элементов 91, 93 И,первый выход в пусковом блоке 79 соединен с первым входом элемента 97 ИЛИ и выходом элемента 87 И, первый вход которого через элемент 102 НЕ соединен с выходом элемента 88 И, а второй вход элемента 87 И - с первым входом элемента 92 И, вторым входом элемента 96 ИЛИ, вторыми входами элементов 88, 93 И, пятым входом элемента 101 ИЛИНЕ и выходом элемента 86 И, второй выход в пусковом блоке 79 соединен с выходом элемента 97 ИЛИ, третий выход - со вторым входом элемента 97 ИЛИ и выходом элемента 90 И, первый вход которого через элемент 103 НЕ соединен с выходом элемента 91 И, а второй вход - с первым входом элемента 94 И, вторым входом элемента 98 ИЛИ, вторыми входами элементов 91, 95 И, пятым входом элемента 100 ИЛИ-НЕ и выходом элемента 89 И, четвертый выход в пусковом блоке 79 соединен с первым входом элемента 99 ИЛИ и выходом элемента 92 И, второй вход которого через элемент 104 НЕ соединен с выходом элемента 93 И, пятый выход в пусковом блоке 79 соединен с выходом элемента 99 ИЛИ,шестой выход - со вторым входом элемента 99 ИЛИ и выходом элемента 94 И, второй вход которого через элемент 105 НЕ соединен с выходом элемента 95 И. Блок 80 автоматической стабилизации горизонтального положения платформы включает в себя элементы 106, 107 И, элементы 108, 109 ИЛИ и элемент 110 НЕ, причем в блоке 80 автоматической стабилизации горизонтального положения платформы первый вход через элемент 110 НЕ соединен с первыми входами элементов 106, 107 И, второй вход - с первым входом элемента 108 ИЛИ третий вход - с первым входом элемента 109 ИЛИ,первый выход - со вторым входом элемента 108 ИЛИ и выходом элемента 106 И, второй вход которого соединен с выходом элемента 108 ИЛИ, а второй выход - со вторым входом 8 6540 1 элемента 109 ИЛИ и выходом элемента 107 И, второй вход которого соединен с выходом элемента 109 ИЛИ. Люлька самоподъемная монтажная работает следующим образом. Прежде чем приступить к эксплуатации люльки, необходимо убедиться в исправности лебедок, тормозов, ловителей, приводов, рабочих и страховочных канатов, а платформа должна находиться в горизонтальном положении, при этом в датчике 24 вследствие жидкого состояния электропроводной ртути 72 верхний ее уровень также располагается горизонтально, параллельно верхней и нижней стенок ампулы 69, и замыкает между собой электроды 70 и 71, в результате чего на выходе появляется сигнал, который поступает на первый вход блока 80 и вход элемента 110 НЕ. Наличие сигнала на входе элемента 110 НЕ вызывает исчезновение сигнала на первых входах элементов 106, 107 И. При необходимости перемещения грузонесущей платформы ВВЕРХ оператор обязан нажать на кнопку 83, в результате чего на ее выходе появляется сигнал, который поступает на первый вход пускового блока 79 и первый вход элемента 96 ИЛИ. Наличие сигнала на первом входе элемента 96 ИЛИ вызывает появление сигнала на его выходе и первом входе элемента 86 И. Наличие сигналов одновременно на всех входах элемента 86 И вызывает появление сигнала на его выходе, втором входе элемента 96 ИЛИ (запоминается), вторых входах элементов 88, 93 И, пятом входе элемента 101 ИЛИ-НЕ (запрет включения команды ВНИЗ), втором входе элемента 87 И и первом входе элемента 92 И. Наличие сигналов одновременно на всех входах элементов 87, 92 И вызывает появление сигналов на их выходах, первых входах элементов 97, 99 ИЛИ, первом и четвертом выходах пускового блока 79, первых входах приводов 12, 13, в результате чего включаются электродвигатели 35, 36. Наличие сигналов на первых входах элементов 97, 99 ИЛИ вызывает появление сигналов на их выходах, втором и пятом выходах пускового блока 79 и входах тормозов 14,15, в результате чего включаются электромагнитные 41, 42 и втягиваются их якоря 49, 50,которые, преодолевая усилие прижимных пружин 47, 48, поворачивают вокруг шарниров 43,44 двуплечие рычаги 45, 46 и перемещают контактные колодки 39, 40, освобождая общие валы 37, 38 барабанов 10, 11. Одновременно при освобождении общих валов 37, 38 электродвигатели 35, 36 начинают вращать барабаны 10, 11, в результате чего грузовые канаты 6, 7 смещаются по блокам 4, 5 и наматываются на барабаны 10, 11, а грузонесущая платформа 1 перемещается ВВЕРХ, при этом страховочные канаты 18, 19 находятся в статистическом состоянии,так как в перемещающихся относительно них ловителях 16, 17 созданы необходимые свободные зазоры 33, 34. Если же при перемещении платформы 1 ВВЕРХ окажется по какой-либо причине приподнятый до предельно допустимого уровня, например левый край, а днище платформы 1 окажется относительно исходного горизонтального уровня под предельно допустимым углом , то вследствие присущих свойств для жидкостей состояния верхний уровень токопроводящей ртути 72 в стеклянных ампулах 69 датчиков 24, 25, 26 постоянно будет горизонтальным, а относительно него верхние и нижние стенки стеклянных ампул 69 будут изменять угол расположения пропорционально изменению углаперекоса платформы 1, поэтому в данной ситуации для датчика 24 этот угол будет равен углу , для датчика 25 будет равен нулю, т.е. совпадение с исходным горизонтальным уровнем, а для датчика 26 будет равен углу 2. При размещении датчика 24 по отношению к горизонтальному исходному уровню под угломтокопроводящая ртуть 72 в его стеклянной ампуле 69 разомкнет электрическую цепь между его электродами 70, 71 и исчезнет сигнал на его выходе, первом входе блока 80 и входе элемента 110 НЕ. 9 6540 1 Исчезновение сигнала на входе элемента 110 НЕ вызывает появление сигнала на его выходе и первых входах элементов 106, 107 И. При размещении датчика 26 по отношению к горизонтальному исходному уровню под углом 2 токопроводящая ртуть 72 в его стеклянной ампуле 69 продолжает размыкать электрическую цепь между его электродами 70, 71, поэтому как не было, так и не будет сигнала на его выходе, третьем входе блока 80 и первом входе элемента 109 ИЛИ. При размещении датчика 25 горизонтально (0) по отношению к горизонтальному уровню токопроводящая ртуть 72 в его стеклянной ампуле 69 замкнет электрическую цепь между электродами 70, 71 и появится сигнал на его выходе, втором входе блока 80 и первом входе элемента 108 ИЛИ. Наличие сигнала на первом входе элемента 108 ИЛИ вызывает появление сигнала на его выходе и втором входе элемента 106 И. Наличие сигнала на всех входах элемента 106 И вызывает появление сигнала на его выходе, втором входе элемента 108 ИЛИ (запоминается), первом выходе блока 80, восьмом входе блока 79, первых входах элементов 88, 95 И и входе сигнализатора 81, информирующем о приподнятом левом крае платформы до предельно допустимого уровня. Наличие сигналов одновременно на всех входах элемента 88 И вызывает появление сигнала на его выходе и входе элемента 102 НЕ. Наличие сигнала на входе элемента 102 НЕ вызывает исчезновение сигнала на его выходе и первом входе и выходе элемента 87 И, первом входе и выходе элемента 97 ИЛИ,первом и втором выходе блока 79, первом входе привода 12 и входе тормоза 14, в результате чего отключаются одновременно электродвигатель 35 и электромагнит 41. При отключении электродвигателя 35 прекращается вращение общего вала 37 барабана 10 лебедки 8, а также прекращается перемещение грузового каната 4 и подъем левого края грузонесущей платформы 1. При отключении электромагнита 41 пружина 47 выдвигает якорь 49 и поворачивает вокруг шарнира 43 двуплечий рычаг 45, в результате чего контактная колодка 39 сильно прижимается и плотно охватывает общий вал 37, предотвращая его вращение и надежно фиксируя в статическом состоянии. Таким образом, применение предложенных тормозов позволяет после отключения электродвигателей сразу же мгновенно фиксировать статическое положение общих валов,что значительно повышает надежность работы лебедок. Так как перемещение левого края платформы 1 прекратилось, а правый ее край продолжает перемещаться ВВЕРХ, то угол перекосаначинает постепенно уменьшаться и платформа возвращается в исходное горизонтальное положение. При возврате платформы в исходное горизонтальное положение на выходе датчика 25 и первом входе элемента 108 ИЛИ исчезает сигнал и появляется сигнал на выходе датчика 24,первом входе блока 80 и входе элемента 110 НЕ. Наличие сигнала на входе элемента 110 НЕ вызывает исчезновение сигнала на его выходе, первом входе и выходе элемента 106 И, втором входе и выходе элемента 108 ИЛИ(сброс памяти), первом выходе блока 80, восьмом входе пускового блока 79, первых входах и выходах элементов 88, 95 И, входах элементов 102, 105 НЕ и входе сигнализатора 81, в результате чего он отключается и информирует об устранении переноса платформы. Исчезновение сигнала на входе элемента 102 НЕ вызывает появление сигнала на его выходе и первом входе элемента 87 И. Наличие сигналов одновременно на всех входах элемента 87 И вызывает появление сигнала на его выходе, первом входе и выходе элемента 97 И, первом и втором выходах пускового блока 79, первом входе привода 12 и входе тормоза 14, в результате чего повторно включаются электродвигатель 35 и тяговый электромагнит 41. После включения электродвигателя 35 и тягового электромагнита 41 аналогично вышеизложенному происходит освобождение общего вала 37 и возобновляется вращение 10 6540 1 барабана 10 и лебедки 8 и перемещение ВВЕРХ левого края платформы 1 одновременно с перемещением ВВЕРХ правого края платформы 1. Таким образом, автоматически без участия оператора устраняется перекос грузонесущей платформы 1 при перемещении ВВЕРХ, благодаря чему сокращаются потери времени,повышается эффективность использования грузонесущей платформы, увеличивается производительность, улучшаются условия обслуживания и эксплуатации. Аналогично происходит выравнивание грузонесущей платформы при приподнятом правом крае и перемещении ВВЕРХ, но при этом уже будет функционировать датчик 24 в паре с датчиком 26. При необходимости останов перемещения грузонесущей платформы осуществляется оператором посредством воздействия на кнопку 85 СТОП, в результате чего на ее выходе появляется сигнал, который поступает на четвертый вход пускового блока 79, третий вход элемента 100 ИЛИ-НЕ и второй вход элемента 101 ИЛИ-НЕ. Наличие сигнала на третьем входе элемента 100 ИЛИ-НЕ вызывает исчезновение сигнала на его выходе, втором входе и выходе элемента 86 И, втором входе и выходе элемента 96 ИЛИ (сброс памяти), втором входе и выходе элемента 87 И, первом входе и выходе элемента 92 И, втором входах элементов 88, 93 И, пятом входе элемента 101 ИЛИ-НЕ(сброс запрета команды ВНИЗ), первых входах и выходах элементов 97, 99 ИЛИ, первом,втором, четвертом и пятом выходах пускового блока 79, первых входах приводов 12, 13 и входах тормозов 14, 15, в результате чего происходит отключение электродвигателей 35,36 и тяговых электромагнитов 41, 42, прекращение вращения барабанов 10, 11 лебедок 8, 9,а также прекращение перемещения грузонесущей платформы и ее останов в необходимом пункте. Автоматический останов грузонесущей платформы произойдет, если она достигнет верхнего крайнего положения, при этом воздействующие элементы 74 на грузовых канатах 6, 7 вступают во взаимодействие с двуплечими рычагами 76 датчиков 27, 28, в результате чего они, преодолевая усилие возвратных соответствующих пружин 77, поворачиваются вокруг шарниров 75 и воздействуют на чувствительные элементы 73, после чего появляются сигналы на выходах датчиков 27, 28, втором и шестом входах пускового блока 79,первом входе элемента 100 ИЛИ-НЕ и третьем входе элемента 101 ИЛИ-НЕ, что аналогично вышеизложенному приведет к отключению электродвигателей 35, 36 и тяговых электромагнитов 41, 42, а также приведет к своевременному прекращению вращения барабанов 10, 11 лебедок 8, 9 и перемещению грузонесущей платформы 1, благодаря чему исключаются столкновения с блоками 6, 7 и консолями 2, 3, предотвращаются аварийные ситуации, повышается безопасность и надежность работы. При необходимости перемещения грузонесущей платформы ВНИЗ оператор обязан нажать на кнопку 84, в результате чего на ее выходе появляется сигнал, который поступает на пятый вход пускового блока 79 и первый вход элемента 98 ИЛИ. Наличие сигнала на входе элемента 98 ИЛИ вызывает появление сигнала на его выходе и втором входе элемента 89 И. Наличие сигналов одновременно на всех входах элемента 89 И вызывает появление сигнала на его выходе, втором входе элемента 98 ИЛИ (запоминается), пятом входе элемента 100 ИЛИ-НЕ (запрет включения команды ВВЕРХ), втором входе элемента 90 И и первом входе элемента 94 И. Наличие сигналов одновременно на всех входах элементов 90, 94 И вызывает появление сигналов на их выходах, вторых входах элементов 97, 98 ИЛИ, третьем и шестом выходах блока 79, вторых входах приводом 12, 13, в результате чего включаются электродвигатели 35, 36. Наличие сигналов на вторых входах элементов 97, 99 ИЛИ вызывает появление сигналов на их выходах, втором и пятом выходах пускового блока 79 и входах тормозов 14,15, в результате чего втягиваются их якоря 49, 50 и, преодолевая усилия прижимных пру 11 6540 1 жин 47, 48, поворачивают вокруг шарниров 43, 44 двуплечие рычаги 45, 46 и перемещают контактные колодки 39, 40, освобождая общие валы 37, 38 барабанов 10, 11. Одновременно при освобождении общих валов 37, 38 электродвигатели 35, 36 начинают вращать барабаны 10, 11, в результате чего грузовые канаты 6, 7 смещаются по блокам 4,5 и разматываются с барабанов 10, 11, а грузонесущая платформа 1 под собственным весом перемещается ВНИЗ, при этом страховочные канаты 18, 19 находятся в статическом состоянии, так как в перемещающихся относительно них ловителях 16, 17 созданы необходимые свободные зазоры 33, 34. Если же при перемещении грузонесущей платформы 1 ВНИЗ окажется по какойлибо причине приподнятой до предельно допустимого уровня, например, правый край, а днище платформы 1 относительно исходного горизонтального уровня под предельно допустимым угломперекоса, то вследствие присущих свойств для жидкостей верхний уровень токопроводящей ртути 72 в стеклянных ампулах 69 датчиков 24, 25, 26 постоянно будет горизонтальным, а относительно нее верхние и нижние стенки соответствующих стеклянных ампул 69 будут изменять угол расположения пропорционально изменению углаперекоса грузонесущей платформы 1, поэтому в данной ситуации для датчика 24 этот угол будет равен углу , для датчика 26 будет равен нулю, т.е. совпадает с исходным горизонтальным уровнем, а для датчика 25 будет равен углу 2. При размещении датчика 24 по отношению к горизонтальному исходному уровню под угломтокопроводящая ртуть 72 в его стеклянной ампуле 69 разомкнет электрическую цепь между ее электродами 70, 71 и исчезнет сигнал на его выходе, первом входе блока 80 и входе элемента 110 НЕ. Исчезновение сигнала на входе элемента 110 НЕ вызывает появление сигнала на его выходе и первых входах элементов 106, 107 И. При размещении датчика 25 по отношению к горизонтальному исходному уровню под углом 2 токопроводящая ртуть 72 в стеклянной ампуле 69 продолжает размыкать электрическую цепь между электродами 70, 71, поэтому как не было так и не будет сигнала на его выходе, втором входе блока 80 и первом входе элемента 108 ИЛИ. При размещении датчика 26 горизонтально (0) по отношению к горизонтальному исходному уровню токопроводящая ртуть 72 в его стеклянной ампуле 69 замкнет электрическую цепь между его электродами 70, 71 и появится сигнал на его выходе, третьем входе блока 80 и первом входе элемента 109 ИЛИ. Наличие сигнала на первом входе элемента 109 ИЛИ вызывает появление сигнала на его выходе и первом входе элемента 107 И. Наличие сигналов одновременно на всех входах элемента 107 И вызывает появление сигнала на его выходе, втором входе элемента 109 ИЛИ (запоминается), втором выходе блока 80, девятом входе пускового блока 79, первых входах элементов 91, 93 И и входе сигнализатора 82, информирующем о приподнятом правом крае платформы до предельно допустимого уровня. Наличие сигналов одновременно на всех входах элемента 91 И вызывает появление сигнала на его выходе и входе элемента 103 НЕ. Наличие сигнала на входе элемента 103 НЕ вызывает исчезновение сигнала на его выходе, первом входе и выходе элемента 90 И, втором входе и выходе элемента 97 ИЛИ,втором и третьем выходах пускового блока 79, входе тормоза 14 и втором входе привода 12,в результате чего отключаются одновременно электродвигатель 35 и электромагнит 41. При отключении электромагнита 41 пружина 47 выдвигает якорь 49 и поворачивает вокруг шарнира 43 двуплечий рычаг 45, в результате чего контактная колодка 39 сильно прижимается и плотно охватывает общий вал 37, предотвращая его вращение и надежно фиксируя в статическом состоянии. 12 6540 1 Так как перемещение левого края платформы 1 прекратилось, а правый ее край продолжает перемещаться ВНИЗ, то угол перекосаначинает постепенно уменьшаться и платформа 1 возвращается в исходное горизонтальное положение. При возврате платформы в исходное горизонтальное положение на выходе датчика 26 и входе элемента 109 ИЛИ исчезает сигнал и появляется сигнал на выходе датчика 24,первом входе блока 80 и входе элемента 110 НЕ. Наличие сигнала на входе элемента 110 НЕ вызывает исчезновение сигнала на его выходе, на первом входе и выходе элемента 107 И, втором входе и выходе элемента 109 ИЛИ (сброс памяти), втором выходе блока 80, девятом входе пускового блока 79, первых входах и выходах элементов 91, 93 И, входах элементов 103, 104 НЕ и входе сигнализатора 82, в результате чего он отключается и информирует об устранении перекоса платформы 1. Исчезновение сигнала на входе элемента 103 НЕ вызывает появление сигнала на его выходе и первом входе элемента 90 И. Наличие сигналов одновременно на всех входах элемента 90 И вызывает появление сигнала на его выходе, втором входе и выходе элемента 97 ИЛИ, втором и третьем выходах блока 79, втором входе привода 12 и входе тормоза 14, в результате чего повторно включаются электродвигатель 35 и тяговый электромагнит 41. После включения электродвигателя 35 и тягового электромагнита 41 аналогично вышеизложенному происходит освобождение общего вала 37 и возобновляется вращение барабана 10 лебедки 8 и перемещение ВНИЗ левого края платформы 1. Таким образом автоматически, без участия оператора, устраняется перекос грузонесущей платформы при перемещении ВНИЗ, благодаря чему сокращаются потери времени, повышается эффективность использования грузонесущей платформы, увеличивается производительность, улучшаются условия обслуживания и эксплуатации. Аналогично происходит выравнивание грузонесущей платформы при приподнятом ее левом крае и перемещении ВНИЗ, но при этом уже будет функционировать датчик 24 в паре с датчиком 25. На основании вышеизложенного видно, что по сравнению с известными предлагаемая люлька самоподъемная монтажная обладает следующими преимуществами во-первых, дополнительное снабжение барабанов лебедок тормозами и применение предложенной системы автоматического управления их тяговыми электромагнитами в заданной по программе функциональной последовательности позволило значительно повысить безопасность и улучшить надежность работы во-вторых, применение датчиком ограничения хода грузонесущей платформы ВВЕРХ,предложенной схемы их подключения и конструктивного выполнения позволило исключить их поломки и аварийные ситуации, повысить безопасность и улучшить надежность работы в-третьих, применение датчиков обрыва грузовых канатов (ослабление натяжения),предложенной схемы их подключения и взаимодействия позволило повысить безопасность и улучшить надежность работы в-четвертых, применение датчиков горизонтального положения и предельно допустимого приподнятого левого и правого краев грузонесущей платформы позволило создать систему автоматического возврата грузонесущей платформы в исходное горизонтальное положение в-пятых, выполнение датчиков горизонтального положения и предельно допустимого приподнятого левого и правого краев грузонесущей платформы в виде стеклянной ампулы с электродами по торцам и токопроводящей ртути внутри позволило использовать токопроводящую ртуть одновременно по двум назначениям с одной стороны, как размыкатель (замыкатель) электрической цепи между электродами с другой стороны, как задатчик горизонтального исходного уровня, поскольку это присуще и свойственно для всех жидкостей, благодаря чему значительно упростилось устройство этих датчиков и обеспечилась возможность создания надежной следящей сис 13 6540 1 темы за изменением угла перекоса грузонесущей платформы в необходимых пределах относительно горизонтального исходного уровня в-шестых, применение предложенного блока автоматической стабилизации горизонтального положения грузонесущей платформы, его логическое выполнение и соединение с пусковым блоком, сигнализаторами и датчиками положения грузонесущей платформы позволило полностью освободить оператора от контроля за горизонтальным уровнем и принятием необходимых мер, значительно сократить потери времени, улучшить условия обслуживания и эксплуатации, повысить производительность в-седьмых, применение предложенного пускового блока, его логическое выполнение и соединение с командными аппаратами, всеми датчиками и приводами гарантирует безопасность и высокую надежность работы, улучшает условия обслуживания и эксплуатации люльки. Предложенная люлька может найти широкое применение при строительстве, монтажных и отделочных работах, а также по другим назначениям в различных отраслях народного хозяйства. Источники информации 1.1099028, 1984. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: E04G 3/16
Метки: самоподъемная, монтажная, люлька
Код ссылки
<a href="https://by.patents.su/14-6540-lyulka-samopodemnaya-montazhnaya.html" rel="bookmark" title="База патентов Беларуси">Люлька самоподъемная монтажная</a>
Одноразрядный десятичный сумматор
Номер патента: 2627
Опубликовано: 30.03.1999
Авторы: Авгуль Леонид Болеславович, Супрун Валерий Павлович, Петроченко Андрей Сергеевич, Курносенко Сергей Васильевич
МПК: G06F 7/50
Метки: десятичный, одноразрядный, сумматор
Текст:
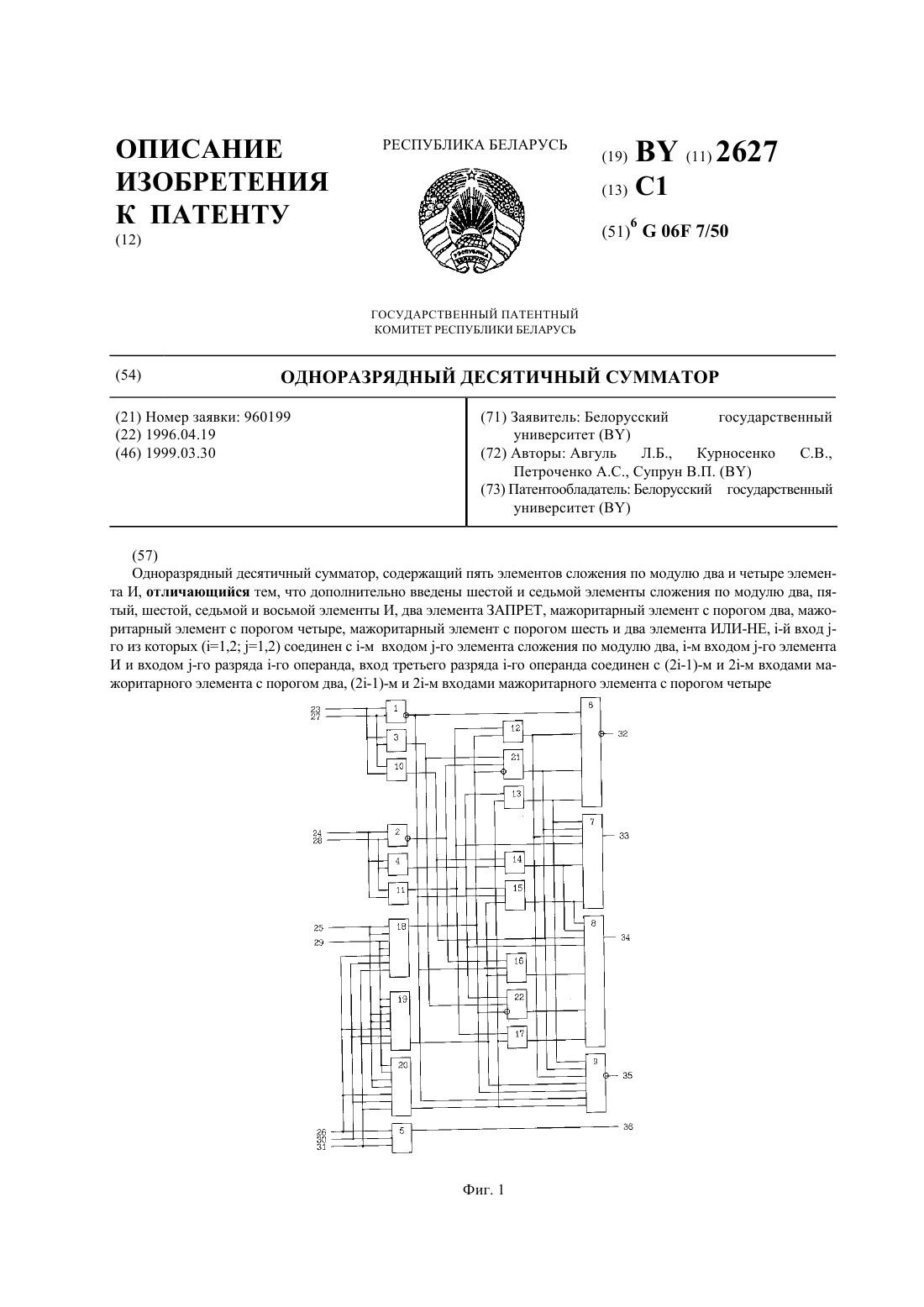
...сумматор, содержащий пять элементов сложения по модулю два и четыре элемента И, согласно изобретению дополнительно введены шестой и седьмой элементы сложения по модулю два, пятый, шестой, седьмой и восьмой элементы И, два элемента ЗАПРЕТ, мажоритарный элемент с порогом два, мажоритарный элемент с порогом четыре,мажоритарный элемент с порогом шесть и два элемента ИЛИ-НЕ, -й вход -го из которых (1,2 ,2) соединен с -м входом -го элемента...
Устройство для вычисления веса двоичных кодовых комбинаций
Номер патента: 5314
Опубликовано: 30.06.2003
Авторы: Авгуль Леонид Болеславович, Супрун Валерий Павлович
Метки: двоичных, устройство, веса, комбинаций, вычисления, кодовых
Текст:
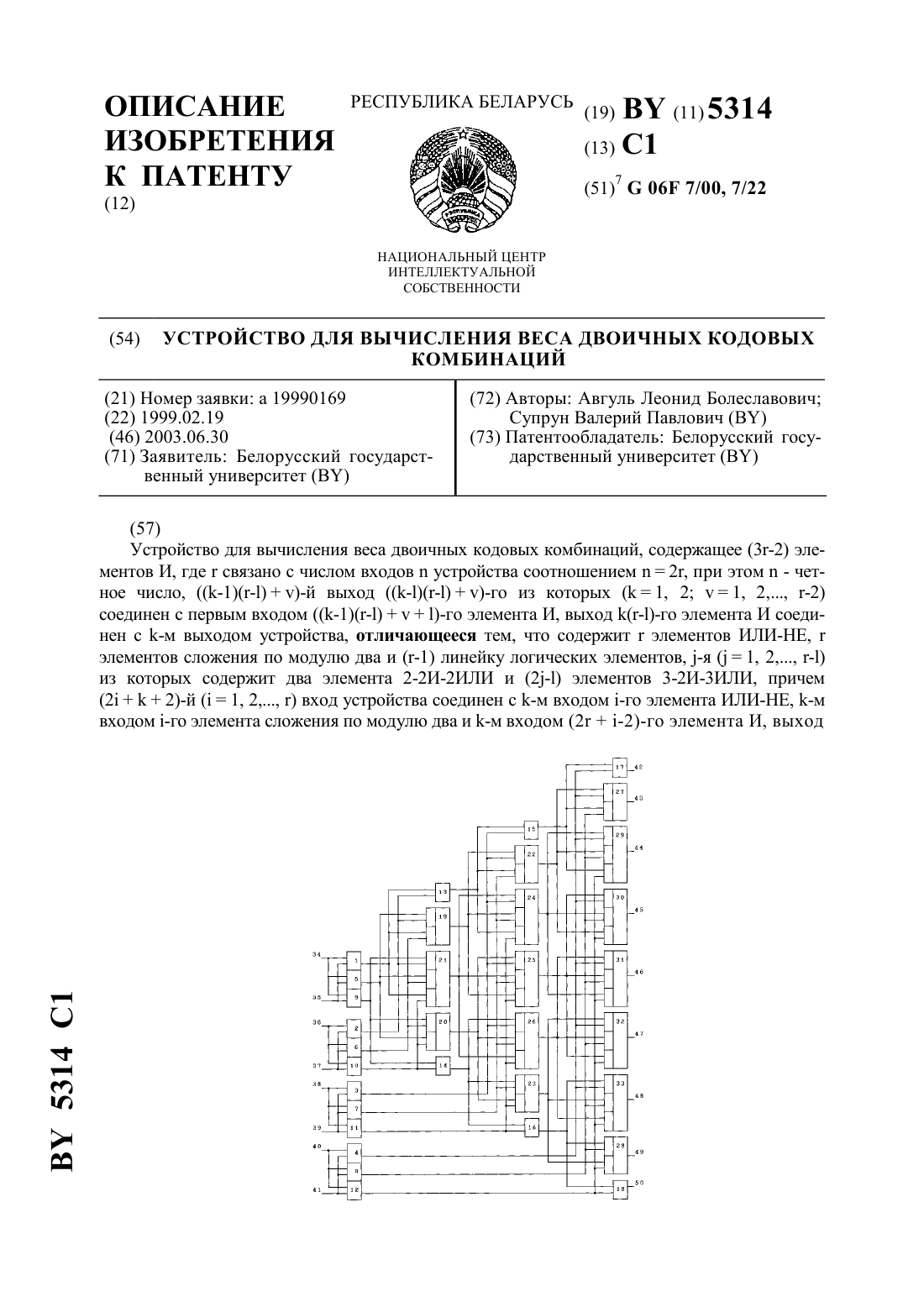
...комбинаций. Названный технический результат достигается путем введения в состав устройства дополнительно элементов ИЛИ-НЕ, сложения по модулю два, 2-2 И-2 ИЛИ и 3-2 И-3 ИЛИ, а также изменением связей между элементами устройства. Устройство для вычисления веса двоичных кодовых комбинаций содержит 3-2 элементов И, гдесвязано с числом входовустройства соотношением 2, при этомчетное число. Выход -)(-))-го элемента И (1, 2, 2 -2) соединен с...
Сумматор по модулю пятнадцать

Номер патента: 2626
Опубликовано: 30.03.1999
Авторы: Петроченко Андрей Сергеевич, Супрун Валерий Павлович, Авгуль Леонид Болеславович, Трухан Олег Константинович
МПК: G06F 7/49
Метки: модулю, пятнадцать, сумматор
Текст:
...на решение задачи повышения быстродействия и уменьшения конструктивной сложности сумматора по модулю пятнадцать. Поставленная задача решается тем, что в сумматор по модулю пятнадцать, содержащий восемь элементов И и четыре элемента сложения по модулю два, -й (,2) вход - (,2,3) из которых соединен с входом(1)-го разряда -го операнда, вход первого разряда второго операнда соединен с первым входом четвертого элемента сложения по модулю...
Сумматор унитарных кодов по модулю три
Номер патента: 2305
Опубликовано: 30.09.1998
Авторы: Авгуль Леонид Болеславович, Супрун Валерий Павлович
МПК: G06F 7/49
Метки: три, модулю, унитарных, кодов, сумматор
Текст:
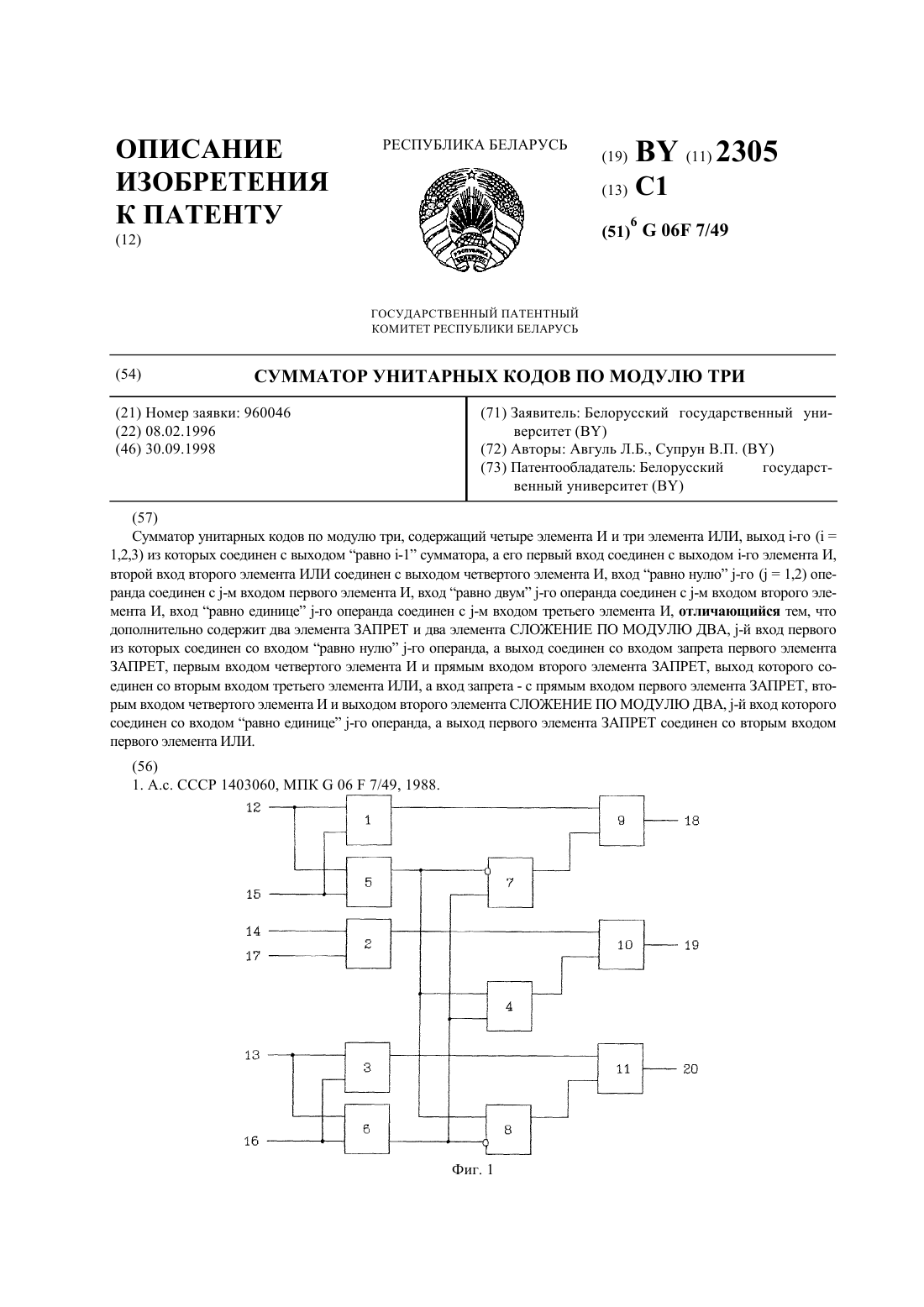
...три содержит четыре элемента И и три элемента ИЛИ. Выход -г (1, 2, 3) элемента ИЛИ соединен с выходом равно -1 сумматора, а его первый вход соединен с выходом -г элемента И. Второй вход второго элемента ИЛИ соединен с выходом четвертого элемента И, вход равно нулю-го (1, 2) операнда соединен с -м входом первого элемента И. Вход равно двум -го операнда соединен с -м входом второго элемента И, вход равно единице -го операнда соединен с -м...
Устройство для сложения по модулю семь
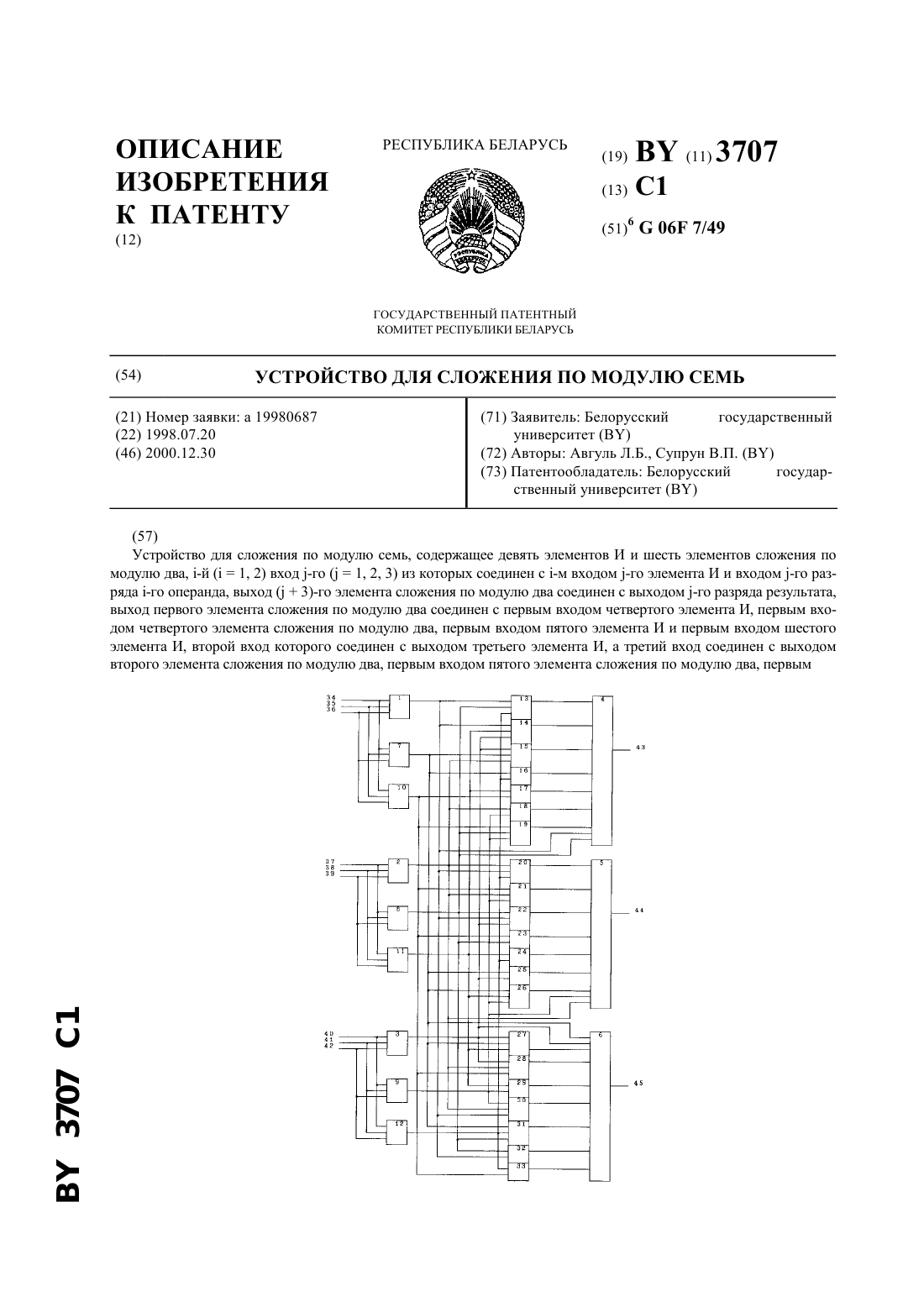
Номер патента: 3707
Опубликовано: 30.12.2000
Авторы: Супрун Валерий Павлович, Авгуль Леонид Болеславович
МПК: G06F 7/49
Метки: семь, модулю, устройство, сложения
Текст:
...элементов, а также изменением связей между элементами устройства. Устройство для сложения по модулю семь содержит девять элементов И и шесть элементов сложения по модулю два, -й (, 2) вход -го (1, 2, 3) из которых соединен с -м входом -го элемента И и входом -го разряда -го операнда, выход (3)-го элемента сложения по модулю два соединен с выходом -го разряда результата, выход первого элемента сложения по модулю два соединен с первым...
Предыдущий патент: Способ и аппарат для обработки зерен злаков, обработанные зерна и их применение
Следующий патент: Устройство для измерения эксплуатационных параметров пневматической шины колеса
Случайный патент: Устройство для интерферометрического контроля оптических элементов