Система визуализации изображения бокового обзора
Текст
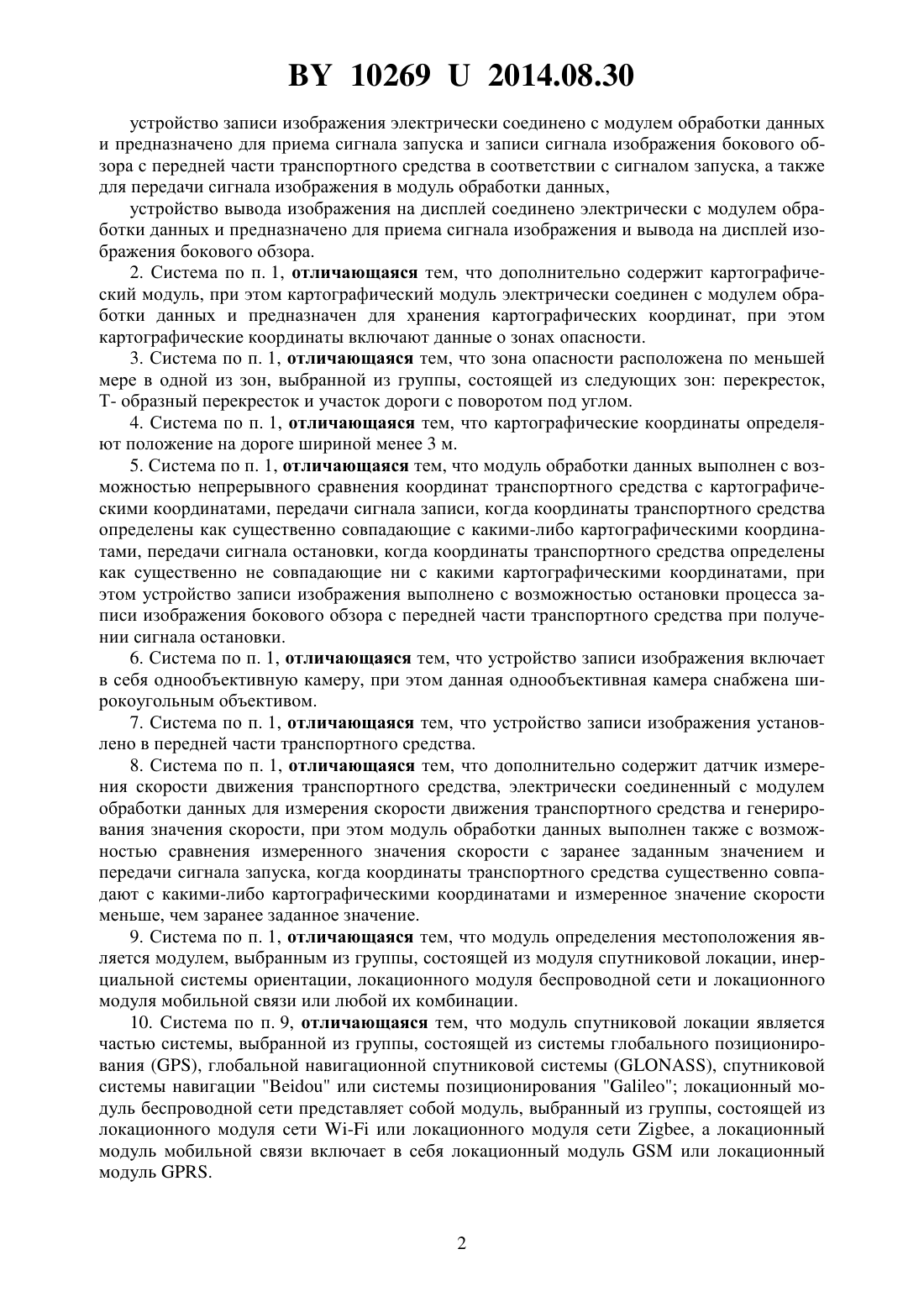
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СИСТЕМА ВИЗУАЛИЗАЦИИ ИЗОБРАЖЕНИЯ БОКОВОГО ОБЗОРА(71) Заявитель Хуа-чуан Аутомобайл Информейшн Текникал Сэнтэ Ко.,Лтд.(73) Патентообладатель Хуа-чуан Аутомобайл Информейшн Текникал Сэнтэ Ко., Лтд.(57) 1. Система визуализации изображения бокового обзора, предназначенная для установки на транспортном средстве и вывода на дисплей по меньшей мере одного изображения бокового обзора с передней части транспортного средства, содержащая модуль определения местоположения транспортного средства, модуль обработки данных, устройство записи изображения и устройство вывода изображения на дисплей, при этом модуль определения местоположения транспортного средства предназначен для генерирования координаты транспортного средства и постоянного обновления координаты транспортного средства,модуль обработки данных электрически соединен с модулем определения местоположения транспортного средства и предназначен для приема координат транспортного средства и сравнения координат транспортного средства с координатами зоны опасности, при этом координаты зоны опасности содержат множество картографических координат,модуль обработки данных выполнен с возможностью передачи сигнала запуска, когда координаты транспортного средства совпадают с какими-либо картографическими координатами, Фиг. 1 102692014.08.30 устройство записи изображения электрически соединено с модулем обработки данных и предназначено для приема сигнала запуска и записи сигнала изображения бокового обзора с передней части транспортного средства в соответствии с сигналом запуска, а также для передачи сигнала изображения в модуль обработки данных,устройство вывода изображения на дисплей соединено электрически с модулем обработки данных и предназначено для приема сигнала изображения и вывода на дисплей изображения бокового обзора. 2. Система по п. 1, отличающаяся тем, что дополнительно содержит картографический модуль, при этом картографический модуль электрически соединен с модулем обработки данных и предназначен для хранения картографических координат, при этом картографические координаты включают данные о зонах опасности. 3. Система по п. 1, отличающаяся тем, что зона опасности расположена по меньшей мере в одной из зон, выбранной из группы, состоящей из следующих зон перекресток,Т- образный перекресток и участок дороги с поворотом под углом. 4. Система по п. 1, отличающаяся тем, что картографические координаты определяют положение на дороге шириной менее 3 м. 5. Система по п. 1, отличающаяся тем, что модуль обработки данных выполнен с возможностью непрерывного сравнения координат транспортного средства с картографическими координатами, передачи сигнала записи, когда координаты транспортного средства определены как существенно совпадающие с какими-либо картографическими координатами, передачи сигнала остановки, когда координаты транспортного средства определены как существенно не совпадающие ни с какими картографическими координатами, при этом устройство записи изображения выполнено с возможностью остановки процесса записи изображения бокового обзора с передней части транспортного средства при получении сигнала остановки. 6. Система по п. 1, отличающаяся тем, что устройство записи изображения включает в себя однообъективную камеру, при этом данная однообъективная камера снабжена широкоугольным объективом. 7. Система по п. 1, отличающаяся тем, что устройство записи изображения установлено в передней части транспортного средства. 8. Система по п. 1, отличающаяся тем, что дополнительно содержит датчик измерения скорости движения транспортного средства, электрически соединенный с модулем обработки данных для измерения скорости движения транспортного средства и генерирования значения скорости, при этом модуль обработки данных выполнен также с возможностью сравнения измеренного значения скорости с заранее заданным значением и передачи сигнала запуска, когда координаты транспортного средства существенно совпадают с какими-либо картографическими координатами и измеренное значение скорости меньше, чем заранее заданное значение. 9. Система по п. 1, отличающаяся тем, что модуль определения местоположения является модулем, выбранным из группы, состоящей из модуля спутниковой локации, инерциальной системы ориентации, локационного модуля беспроводной сети и локационного модуля мобильной связи или любой их комбинации. 10. Система по п. 9, отличающаяся тем, что модуль спутниковой локации является частью системы, выбранной из группы, состоящей из системы глобального позиционирования , глобальной навигационной спутниковой системы , спутниковой системы навигацииили системы позиционированиялокационный модуль беспроводной сети представляет собой модуль, выбранный из группы, состоящей из локационного модуля сети - или локационного модуля сети , а локационный модуль мобильной связи включает в себя локационный модульили локационный модуль . Настоящая полезная модель относится к системе визуализации изображений бокового обзора, а более конкретно к системе визуализации изображения бокового обзора с передней части транспортного средства, которая получает данное изображение благодаря сопоставлению координат транспортного средства с картографическими координатами. В нашей повседневной жизни в случаях, когда транспортное средство движется в узком переулке и пересекает перекресток, а препятствия (такие, например, как здания или автомобили, припаркованные на улице) с обеих сторон транспортного средства могут загораживать обзор водителя, водитель не в состоянии увидеть транспортное средство, приближающееся с левой или с правой стороны. Когда же водитель замечает транспортное средство, приближающееся с левой или с правой стороны, почти вся передняя часть его транспортного средства уже выехала на перекресток, что легко может привести к дорожно-транспортному происшествию. Поскольку узкие переулки, как правило, не имеют дорожных знаков, в таких случаях водителям приходится самостоятельно проверять, не приближаются ли транспортные средства с левой или с правой стороны, что делает вождение очень неудобным и опасным. Даже в случаях, когда на перекрестке нанесена стандартная разметка, сохраняется потенциальный риск того, что некоторые водители будут не в состоянии следовать указаниям дорожных знаков и не заметят их при приближении к перекрестку каких-либо транспортных средств, движущихся с левой или с правой стороны. Обзор водителя может быть заблокирован стойкой А транспортного средства или слепой зоной, вследствие чего обзор водителя будет ограничен. Известна система визуализации изображения с передней, задней и боковых сторон транспортного средства с помощью передающей камеры и обработки изображения с последующим выведением изображения на монитор 1. Однако эта система имеет определенный недостаток, поскольку она не в состоянии сочетать данную информацию с информацией о пересечении переулков и улиц, чтобы заранее предупредить водителя. Известна также система записи визуальной информации, картографических данных и информации о транспортном средстве с помощью устройства формирования изображения,устанавливаемого внутри транспортного средства для того, чтобы идентифицировать положение транспортного средства 2. Недостатком данной системы является то, что она может только определять положение транспортного средства, но она не в состоянии заранее определить информацию о пересечении переулков и улиц. С учетом вышеуказанных проблем, настоящая полезная модель направлена на создание эффективной системы визуализации изображения бокового обзора, способной сравнивать координаты транспортного средства, местоположение которого определяется с помощью модуля определения местоположения транспортного средства, с картографическими координатами зон опасности, а также запускать устройство записи изображения бокового обзора с передней части транспортного средства, когда транспортное средство находится в зоне опасности, с тем, чтобы записать изображение бокового обзора с передней части транспортного средства и предоставить водителю это изображение. Ввиду вышеупомянутых недостатков известного уровня техники первоочередная задача настоящей полезной модели заключается в создании системы визуализации изображения бокового обзора, свободной от указанных недостатков и исключающей проблему,когда водитель не может проверить, возможно ли появление какого-либо другого транспортного средства, приближающегося с левой или с правой стороны, в то время когда во 3 102692014.08.30 дитель подъезжает к перекрестку. Когда же водитель замечает, что другое транспортное средство приближается с левой или с правой стороны, вся передняя часть транспортного средства водителя уже может выехать на перекресток и водитель может оказаться не в состоянии уклониться от какого-либо приближающегося транспортного средства, что сопряжено с определенным риском и неудобством для водителя. Для решения поставленной задачи в настоящей полезной модели предлагается система визуализации изображения бокового обзора, имеющая модуль определения местоположения транспортного средства, а также модуль обработки данных, предназначенный для генерирования координаты транспортного средства и сравнения координаты транспортного средства с картографическими координатами зон опасности, чтобы определить,находятся ли координаты транспортного средства в пределах диапазона картографических координат зоны опасности, при этом, если координаты транспортного средства приближаются к картографическим координатам, устройство записи изображения будет запущено, чтобы записать изображение и предоставить изображение на дисплей водителя. Для решения вышеупомянутой задачи настоящая полезная модель предлагает систему визуализации изображения бокового обзора, устанавливаемую на транспортном средстве для вывода на дисплей водителя по меньшей мере одного изображения бокового обзора с передней части транспортного средства, причем система визуализации изображения бокового обзора включает в себя модуль определения местоположения, модуль обработки данных, устройство записи изображения на дисплей, устройство вывода изображения на дисплей. Модуль определения местоположения предназначен для определения местоположения транспортного средства, генерирования координат транспортного средства и постоянного обновления координат транспортного средства. Модуль обработки данных электрически соединен с модулем определения местоположения для получения координат транспортного средства и сравнения координат транспортного средства с данными зоны опасности,причем данные зоны опасности включают в себя множество картографических координат. Если модуль обработки данных определит, что координаты транспортного средства существенно совпадают с какими-либо картографическими координатами, передается сигнал запуска. Устройство записи изображения электрически соединено с модулем обработки данных для приема сигнала запуска для записи изображения бокового обзора по ходу движения транспортного средства в соответствии с сигналом запуска, чтобы воспринимать сигнал изображения и передавать сигнал изображения в модуль обработки данных. Устройство вывода изображения на дисплей электрически соединено с модулем обработки данных и предназначено для приема сигнала изображения бокового обзора и вывода на дисплей изображения бокового обзора. При этом, если координаты транспортного средства существенно совпадают с картографическими координатами, это означает, что либо координаты транспортного средства совпадают с картографическими координатами, либо координаты транспортного средства приближаются к картографическим координатам, либо что координаты транспортного средства и картографические координаты находятся в пределах одного и того же диапазона. Однако данная полезная модель не ограничивается только вышеуказанными возможностями. При этом система визуализации изображения бокового обзора дополнительно содержит картографический модуль, который электрически соединен с модулем обработки данных и предназначен для хранения картографических координат, причем картографические координаты включают в себя сведения о зонах опасности. При этом зона опасности расположена по меньшей мере в зоне, выбранной из группы,включающей перекресток, Т-образное дорожное пересечение и участок дороги с поворотом под углом. При этом картографические координаты определяют место на дороге шириной менее 3 м. 4 102692014.08.30 При этом модуль обработки данных сравнивает координаты транспортного средства с картографическими координатами непрерывно и после того, как модуль обработки данных определит, что координаты транспортного средства существенно совпадают с картографическими координатами, модуль обработки данных передает сигнал запуска. Модуль обработки данных передает сигнал остановки, когда координаты транспортного средства будут определены как существенно не совпадающие ни с одной из картографических координат, при этом устройство записи изображения при получении сигнала остановки прекращает запись изображения бокового обзора с передней части транспортного средства. Существенное отличие координат транспортного средства от картографических координат означает либо то, что координаты транспортного средства являются существенно отдаленными от картографических координат, либо то, что координаты транспортного средства и картографические координаты находятся в различных диапазонах. Однако полезная модель не ограничивается только такими вариантами. При этом устройство записи изображения включает в себя однообъективную камеру,которая снабжена широкоугольным объективом. При этом устройство записи изображения установлено в передней части транспортного средства. При этом система визуализации изображения бокового обзора дополнительно содержит датчик измерения скорости движения транспортного средства, электрически соединенный с модулем обработки данных и предназначенный для измерения скорости движения транспортного средства и генерирования значения скорости движения транспортного средства, при этом модуль обработки данных выполнен с возможностью сравнения данного значения скорости с заранее заданным значением и с возможностью передачи сигнала запуска в случае, если модуль обработки данных определит, что координаты транспортного средства существенно совпадают с какими-либо картографическими координатами, а данное значение скорости меньше, чем заранее заданное. При этом модуль определения местоположения может быть модулем спутниковой локации, модулем инерциальной системы ориентации, локационным модулем беспроводной сети, локационным модулем мобильной связи или любой их комбинацией. Предпочтительно, модуль спутниковой локации может быть частью системы глобального позиционирования , глобальной навигационной спутниковой системы , спутниковой системы навигацииили системы позиционирования , а локационный модуль беспроводной сети включает в себя локационный модуль сети- или локационный модуль сети , причем локационный модуль мобильной связи может быть частью локационного модуляили локационного модуля . По сравнению с известным на сегодняшний день уровнем техники настоящая полезная модель обладает следующими преимуществами и возможностями. Водитель транспортного средства обычно вынужден выезжать на перекресток до того,как он может увидеть другие транспортные средства, приближающиеся с левой и/или с правой стороны, поэтому настоящая полезная модель представляет собой систему визуализации изображения бокового обзора, содержащую модуль определения местоположения транспортного средства для генерирования координат транспортного средства модуль обработки данных для сравнения координат транспортного средства с картографическими координатами, и если координаты транспортного средства существенно совпадут с картографическими координатами, то устройство записи изображения будет срабатывать по сигналу запуска для записи изображения бокового обзора по ходу движения транспортного средства а также устройство вывода изображения на дисплей для вывода изображения бокового обзора на дисплей и представления изображения бокового обзора для визуального восприятия водителем. Таким образом, водитель может проверить, имеется ли какоелибо транспортное средство, приближающееся с левой или с правой стороны пересечения дорог, прежде чем водитель выедет передней частью своего транспортного средства на 5 102692014.08.30 перекресток, благодаря чему данная полезная модель способна предотвратить дорожнотранспортные происшествия и эффективно повысить безопасность вождения. Предпочтительные варианты исполнения данной полезной модели продемонстрированы нижеприведенными фигурами. На фиг. 1 показана блок-схема системы визуализации изображения бокового обзора. На фиг. 2 показано изображение, соответствующее картографическим координатам,включающим зону опасности . На фиг. 3 показано изображение, которое показывает взаимосвязь между транспортным средством на перекрестке и картографическими координатами. На фиг. 4 показано устройство вывода изображения на дисплей, отображающее изображение бокового обзора. На фиг. 5 показана взаимосвязь между транспортным средством на Т-образном перекрестке и картографическими координатами. На фиг. 6 показана взаимосвязь между транспортным средством на участке дороги с поворотом под углом и картографическими координатами. На фиг. 7 показана взаимосвязь между транспортным средством и перекрестком, который образуют главная дорога и ответвление дороги. На фиг. 8 показана взаимосвязь между транспортным средством и перекрестком, который образуют две односторонние дороги. Технический результат настоящей полезной модели станет очевидным из последующего подробного описания предпочтительных вариантов исполнения настоящей полезной модели и его представления с помощью соответствующих фигур. Как показано на фиг. 1-4, содержащих соответственно блок-схему системы визуализации изображения бокового обзора, изображение в соответствии с картографическими координатами, включающими зону опасности, изображение, отражающее соответствующую взаимосвязь между транспортным средством на перекрестке и картографическими координатами, а также изображение устройства вывода изображения бокового обзора на дисплей в соответствии с настоящей полезной моделью, где система 100 визуализации изображения бокового обзора содержит модуль 1 определения местоположения, модуль 2 обработки данных, картографический модуль 3, устройство 4 записи изображения, устройство 5 вывода изображения на дисплей и датчик 6 измерения скорости движения транспортного средства. При этом система 100 визуализации изображения бокового обзора устанавливается внутри транспортного средства 200 для вывода на дисплей по меньшей мере одного изображения бокового обзора по ходу движения транспортного средства 200. Модуль 1 определения местоположения определяет местоположение транспортного средства 200, чтобы генерировать координаты транспортного средства , а затем постоянно обновляет координаты транспортного средства . При этом модуль 1 определения местоположения обновляет координаты транспортного средствас частотой один раз в секунду, при этом модуль 1 определения местоположения может представлять собой модуль спутниковой локации, инерциальную систему ориентирования, локационный модуль беспроводной сети, локационный модуль мобильной связи или любую комбинацию вышеперечисленного.Предпочтительно, когда модуль спутниковой локации является частью системы, выбранной из системы глобального позиционирования ,глобальной навигационной спутниковой системы , спутниковой системы навигацииили системы позиционирования , причем локационный модуль беспроводной сети может быть частью локационного модуля сети - или локационного модуля сети , а локационный модуль мобильной связи включает в себя локационный модульили локационный модуль . Модуль 2 обработки данных электрически соединен с модулем 1 определения местоположения для приема координат транспортного средства , сгенерированных модулем 1 определения местоположения, и для сравнения координат транспортного средства 6 с зоной опасности , причем зона опасностивключает в себя множество картографических координат (МС), при этом модуль 2 обработки данных передает сигнал запускав случае, если модуль 2 обработки данных определит, что координаты транспортного средствасущественно совпадают с какими-либо картографическими координатами (МС). При этом модуль 2 обработки данных является элементом, обладающим функциями обработки и вычисления данных, как, например, центральный процессор или чип интегральной схемы (ИС). Картографический модуль 3 электрически соединен с модулем 2 обработки данных,причем картографический модуль 3 хранит картографические данные , а картографические данныевключают данные о вышеупомянутой зоне опасноститаким образом, что модуль 2 обработки данных может сравнивать координаты транспортного средствас картографическими координатами (МС) в зоне опасности . При этом картографический модуль 3 содержит память для хранения картографических данных. Устройство 4 записи изображения электрически соединено с модулем 2 обработки данных для приема сигнала запуска , записи изображения бокового обзора по ходу движения транспортного средства 200 в соответствии с сигналом запускао записи сигнала изображения , а затем передачи сигнала изображенияв модуль 2 обработки данных. При этом устройство 4 записи изображения представляет собой прибор с зарядовой связьюили активный сенсорный датчик пикселей из комплементарного металлооксидного полупроводника (/КМОП), предназначенного для преобразования оптического изображения в электронный сигнал. Устройство 5 вывода изображения на дисплей электрически соединено с модулем 2 обработки данных для приема сигнала изображенияи предназначено для вывода на дисплей изображения бокового обзора. При этом устройство 5 вывода изображения на дисплей представляет собой экран - жидкокристаллический дисплейили сенсорный экран для вывода изображения на дисплей. Кроме того, модуль 1 определения местоположения, модуль 2 обработки данных, картографический модуль 3 и устройство 5 вывода изображения на дисплей объединены в навигационном устройстве или автотранспортном записывающем устройстве и могут быть встроены или внешне подключены к бортовому компьютеру транспортного средства 200. Датчик 6 измерения скорости движения транспортного средства электрически соединен с модулем 2 обработки данных для измерения скорости транспортного средства 200,чтобы генерировать значение скорости, а модуль 2 обработки данных сравнивает данное значение скорости с заранее заданным значением. Если модуль 2 обработки данных определит, что координаты транспортного средствасущественно совпадают с какимилибо из картографических координат (МС), а данное значение скорости окажется меньше,чем заранее заданное значение, модуль 2 обработки данных передаст сигнал запуска . Например, если заданное значение скорости меньше 25 км/ч, это означает, что транспортное средство 200 следует вести по дороге медленно и осторожно. При этом датчик 6 измерения скорости движения транспортного средства использует индуктивную катушку для распознания вращения трансмиссионного вала для того, чтобы сгенерировать аналоговый сигнал и вычислить скорость транспортного средства. На фиг. 2 изображен перекресток, образованный четырехполосным пересечением, согласно картографическим данным , при этом зона опасностисоответствует местоположению перекрестка. Другими словами, зона опасностирасположена в местоположении непосредственно в точке пересечения четырех полос. При этом зона опасностиформируется и обозначена множеством картографических координат(МС). Кроме того, картографические координаты (МС) включают трассы шириной менее 3 м, такие, как дороги, улицы или переулки, обозначенные на карте, а размер опасности продлен приблизительно на 1015 м по отношению к перекрестку. 7 102692014.08.30 На фиг. 3 изображение относится к случаю, когда транспортное средство 200 входит в зону опасности(как показано на фиг. 2), координаты транспортного средствапопадают в зону опасностии соответствуют картографическим координатам (МС),так что модуль 2 обработки данных приведет в действие устройство 4 записи изображения для записи изображения. Поскольку устройство 4 записи изображения установлено в передней части транспортного средства 200 и устройство 4 записи изображения имеет однообъективную камеру, которая снабжена широкоугольным объективом, устройство 4 записи изображения может записывать изображения бокового обзора спереди, сзади, слева или справа от транспортного средства 200. В других предпочтительных вариантах исполнения данной полезной модели устройство 4 записи изображения не ограничивается только широкоугольным объективом, как указано в данном предпочтительном варианте исполнения полезной модели, оно может быть сформировано с двумя двунаправленными объективами. На фиг. 4 изображено устройство 5 вывода изображения на дисплей, которое выводит изображение бокового обзора 1 с передней левой стороны транспортного средства 200 и изображение бокового обзора 2 с передней правой стороны транспортного средства 200,и транспортное средство 200 а можно увидеть в изображении бокового обзора 1, причем местоположение транспортного средства 200 а, соответствующее картографическим данным , обозначено пунктирной линией, как показано на фиг. 3. На практике местоположение транспортного средства 200 а находится в слепой зоне видимости водителя транспортного средства 200. Другими словами, обзор водителя заблокирован зданием или стойкой А в транспортном средстве 200, так что водитель не может видеть транспортное средство 200 а. Из изображения бокового обзора 1, выведенного на дисплей водителя устройством вывода изображения на дисплей 5, водитель может увидеть, имеется ли автомобиль в переулке, несмотря на наличие слепой зоны, в результате чего заметно повышается безопасность вождения. Из приведенного выше описания следует если модуль 2 обработки данных определяет, что координаты транспортного средствасущественно совпадают с какой-либо одной из картографических координат (МС), модуль 2 обработки данных будет непрерывно сравнивать координату транспортного средствас картографическими координатами (МС) и передавать сигнал остановки (не показан на фигурах), когда координата транспортного средствабудет определена как существенно неравная по отношению к любой из картографических координат (МС). Устройство 4 записи изображения получает сигнал остановки для того, чтобы остановить процесс записи изображения бокового обзора по ходу движения транспортного средства 200. Рассмотрим совместно фиг. 1, 5 и 6. Фиг. 5 представляет изображение, которое показывает соответствующую взаимосвязь между транспортным средством на Т-образном перекрестке и картографическими данными согласно настоящей полезной модели, а фиг. 6 представляет изображение, которое показывает соответствующую взаимосвязь между транспортным средством на участке дороги с поворотом под углом и картографическими данными согласно настоящей полезной модели. Когда транспортное средство 200 въезжает в зону опасности 1, согласно картографическим данным , соответствующую Т-образному перекрестку, координаты транспортного средстваопределяются модулем 1 определения местоположения как по существу равные картографическим координатам (МС), так что модуль 2 обработки данных приводит в действие устройство 4 записи изображения для записи изображения бокового обзора, а устройство 5 вывода изображения на дисплей выводит изображения бокового обзора с обеих сторон Т-образного перекрестка. Кроме того, когда транспортное средство 200 согласно картографическим даннымвъезжает в зону опасности 2, соответствующую участку дороги с поворотом под углом, устройство 5 вывода изображения на дисплей выводит изображение бокового обзора с участка дороги, поворачивающего под прямым углом. 8 102692014.08.30 Рассмотрим совместно фиг. 1, 7 и 8. Фиг. 7 представляет изображение, которое показывает соответствующую взаимосвязь между транспортным средством и перекрестком,который образован пересечением главной дороги и ответвлением дороги в соответствии с настоящей полезноймоделью, а фиг. 8 представляет изображение, которое показывает соответствующую взаимосвязь между транспортным средством и перекрестком, который образован пересечением двух односторонних дорог, в соответствии с настоящей полезной моделью. Когда перекресток образован пересечением главной дороги 1 и ответвлением дороги 2, главная дорога имеет более высокий приоритет движения, а транспортное средство 200, которое движется по ответвлению дороги 2, должно двигаться в соответствии с дорожными знаками, и когда транспортное средство 200 приближается к перекрестку, соответствующая зона опасности 3 находится на ответвлении дороги 2. Когда перекресток образован пересечением двух односторонних дорог 3, 4, только одна зона опасности 4 устанавливается по одной стороне дороги с односторонним движением 3, 4, которая подходит к перекрестку, при этом другая сторона, отходящая от перекрестка, не имеет никакой зоны опасности. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 11
МПК / Метки
МПК: B60W 30/08
Метки: изображения, бокового, визуализации, система, обзора
Код ссылки
<a href="https://by.patents.su/11-u10269-sistema-vizualizacii-izobrazheniya-bokovogo-obzora.html" rel="bookmark" title="База патентов Беларуси">Система визуализации изображения бокового обзора</a>
Система салонных зеркал заднего обзора транспортного средства
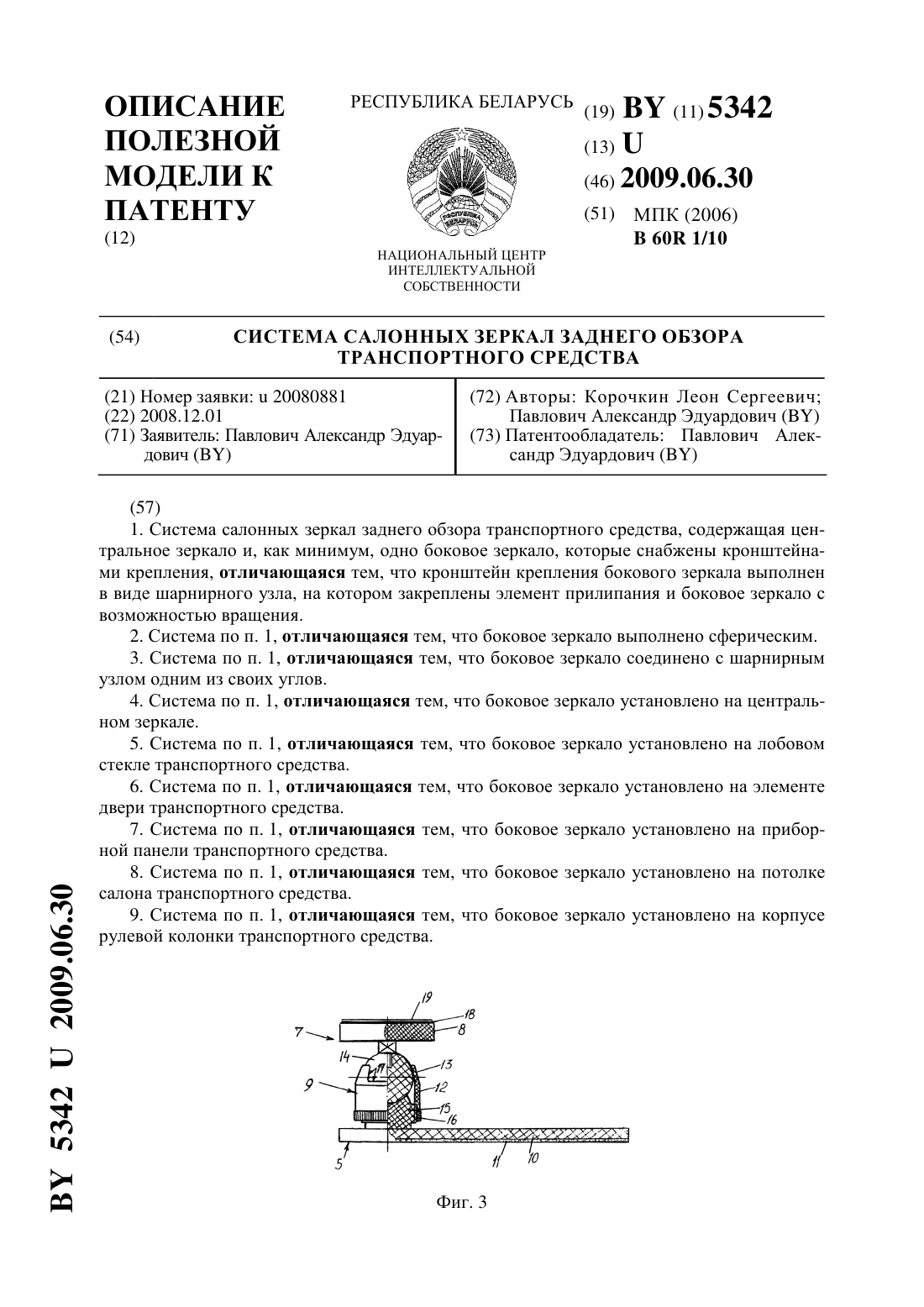
Номер патента: U 5342
Опубликовано: 30.06.2009
Авторы: Павлович Александр Эдуардович, Корочкин Леон Сергеевич
МПК: B60R 1/10
Метки: заднего, обзора, салонных, средства, транспортного, система, зеркал
Текст:
...зеркало установлено в задней части салона транспортного средства, например, на его заднем стекле или заднем сиденье боковое зеркало установлено на перегородке салона транспортного средства элемент прилипания выполнен в виде вакуумной присоски элемент прилипания выполнен в виде гибкой полимерной пластины, покрытой адгезивным слоем шарнирный узел кронштейна крепления бокового зеркала выполнен из полой втулки,охватывающей своим седлом элемент...
Система отображения изображения в туннеле или шахте

Номер патента: U 965
Опубликовано: 30.09.2003
Автор: Кугушев Сергей Анатольевич
МПК: G09F 19/18
Метки: или, изображения, шахте, отображения, туннеле, система
Текст:
...вагона поезда. Кроме этого, зеркальная поверхность расположена по всей длине туннеля или шахты без разрывов от станции до станции. Помимо этого, на транспортном средстве находится реле включения и таймер отключения. Заявляемая полезная модель схематически показана на фиг. 1 и 2, где фиг. 1 - поперечный разрез вагона метрополитена, расположенного в туннеле фиг. 2 - вид окна транспортного средства с проекцией на нем. Система отображения...
Голографический интерферометр бокового сдвига для контроля качества оптических элементов

Номер патента: U 4176
Опубликовано: 28.02.2008
Авторы: Ануфрик Славомир Степанович, Ляликов Александр Михайлович, Лявшук Ирена Александровна
МПК: G01B 9/021
Метки: качества, бокового, элементов, интерферометр, голографический, сдвига, контроля, оптических
Текст:
...перпендикулярно зондирующему световому пучку. Новые признаки полезной модели - оптический держатель контролируемого оптического элемента установлен на направляющей, ориентированной перпендикулярно направлению зондирующего светового пучка, с возможностью перемещения вдоль направляющей. Технический результат, достигаемый в полезной модели - возможность записи изображения контролируемого оптического элемента в произвольном месте...
Система визуализации тренажера летательного аппарата для совместного обучения членов экипажа
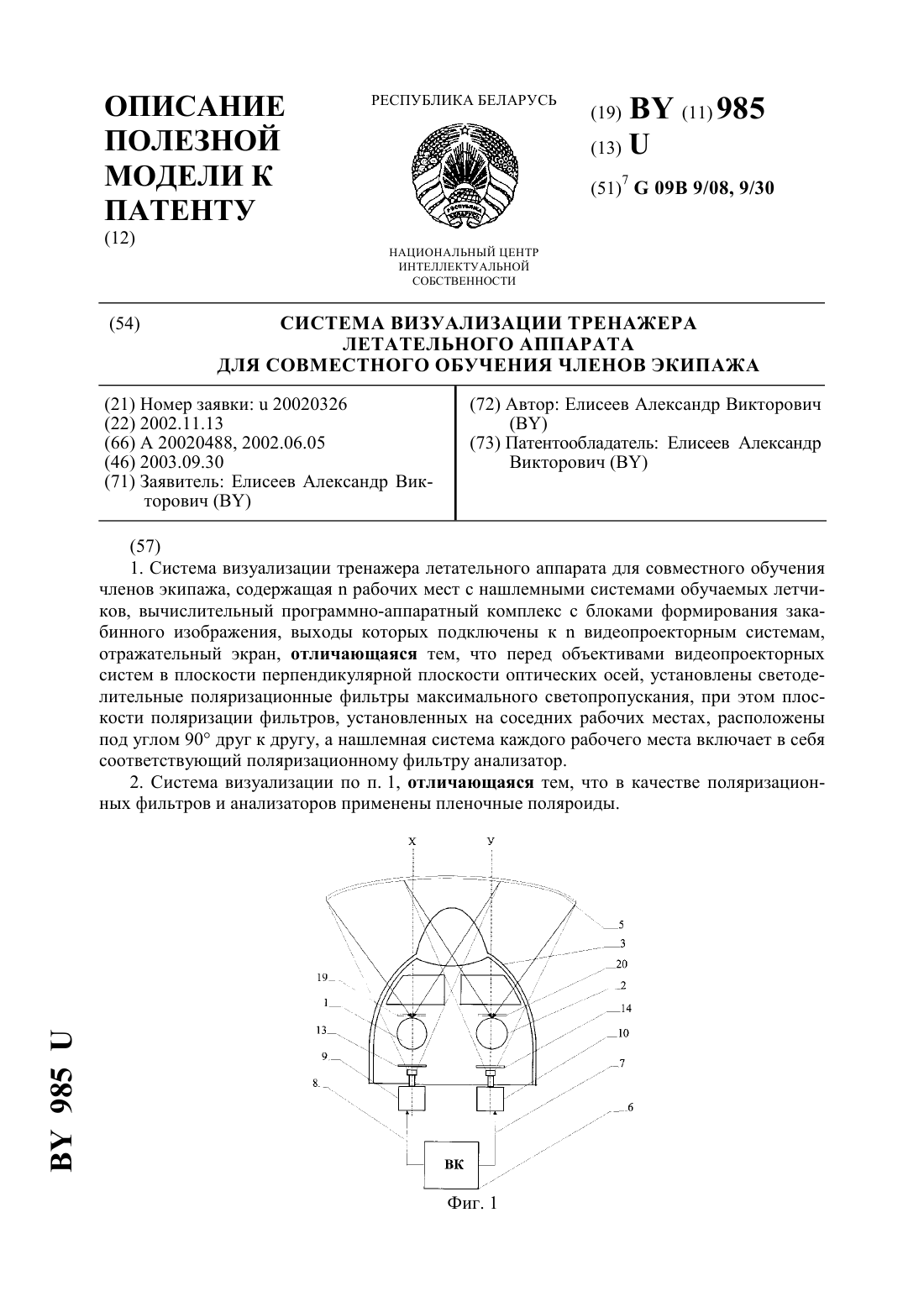
Номер патента: U 985
Опубликовано: 30.09.2003
Автор: Елисеев Александр Викторович
Метки: система, тренажера, совместного, членов, визуализации, экипажа, летательного, аппарата, обучения
Текст:
...и удешевлении конструкции системы визуализации тренажера ЛА для совместного обучения летчиков в составе экипажа. Поставленная задача достигается тем, что в известном устройстве системы визуализации тренажера летательного аппарата, содержащемрабочих мест с нашлемными системами обучаемых летчиков, вычислительный программно-аппаратный комплекс с блоками формирования закабинного изображения, выходы которых подключены квидеопроекторным...
Система ввода изображения в окуляр
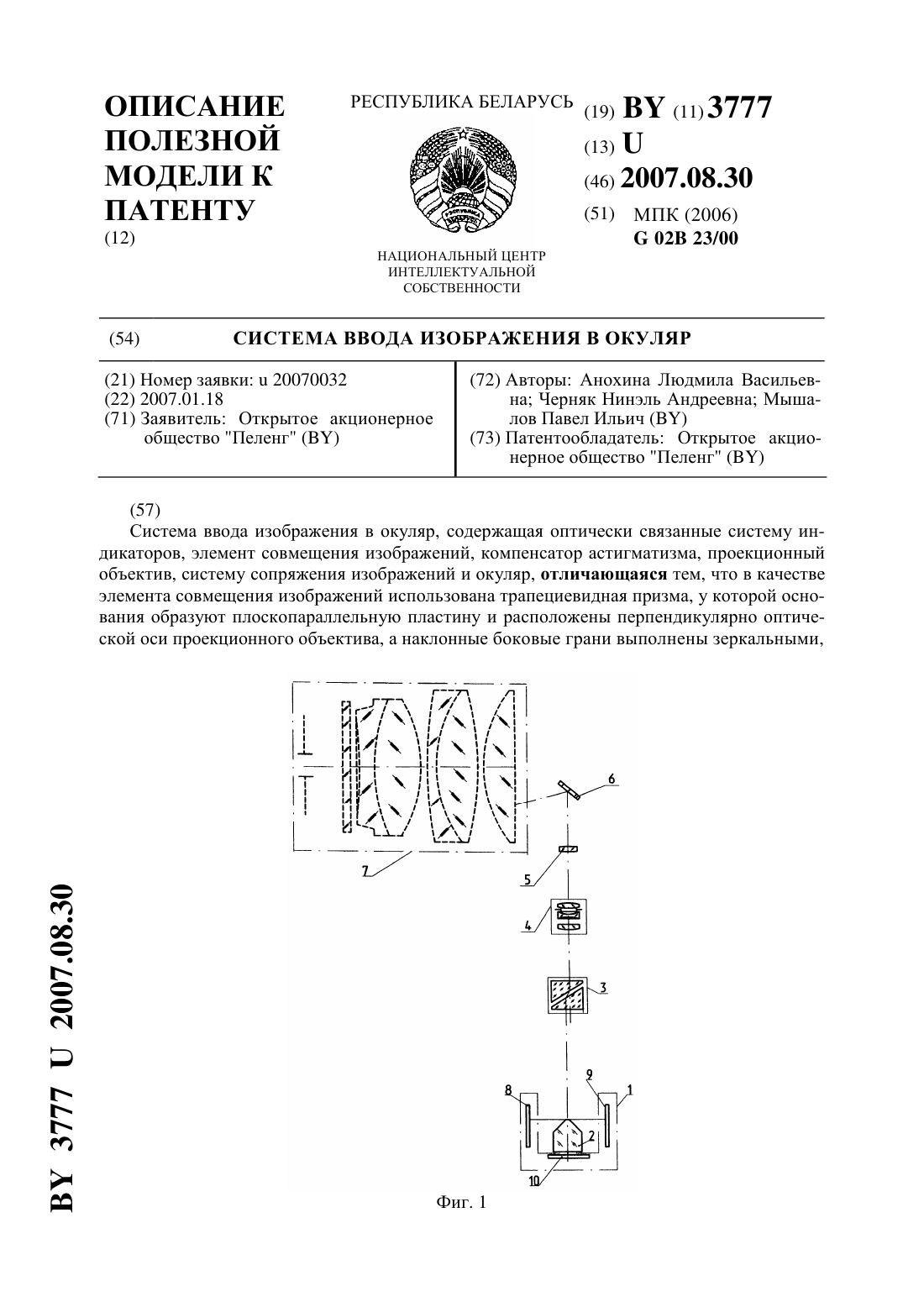
Номер патента: U 3777
Опубликовано: 30.08.2007
Авторы: Черняк Нинэль Андреевна, Анохина Людмила Васильевна, Мышалов Павел Ильич
МПК: G02B 23/00
Метки: изображения, ввода, окуляр, система
Текст:
...(122 ) 30,0005( ок ) 2 , причем при (-)0 воздушная наклонная пластина расположена в сагиттальном сечении, а при (х-х)0 - в меридиональном сечении. Системы ввода изображения в окуляр применяются в наблюдательных приборах, когда необходимо в поле зрения окуляра, кроме основного изображения, видеть дополнительную информацию, например измеренную лазерным дальномером дальность, координаты наблюдаемого объекта, световую информацию и т.д. Так как...
Предыдущий патент: Конденсатор с импульсным дросселем
Следующий патент: Модульное устройство подстаканника
Случайный патент: Устройство для вычисления полиномиальных симметрических булевых функций десяти переменных