Автоматическое подъемно-поворотное устройство

Текст
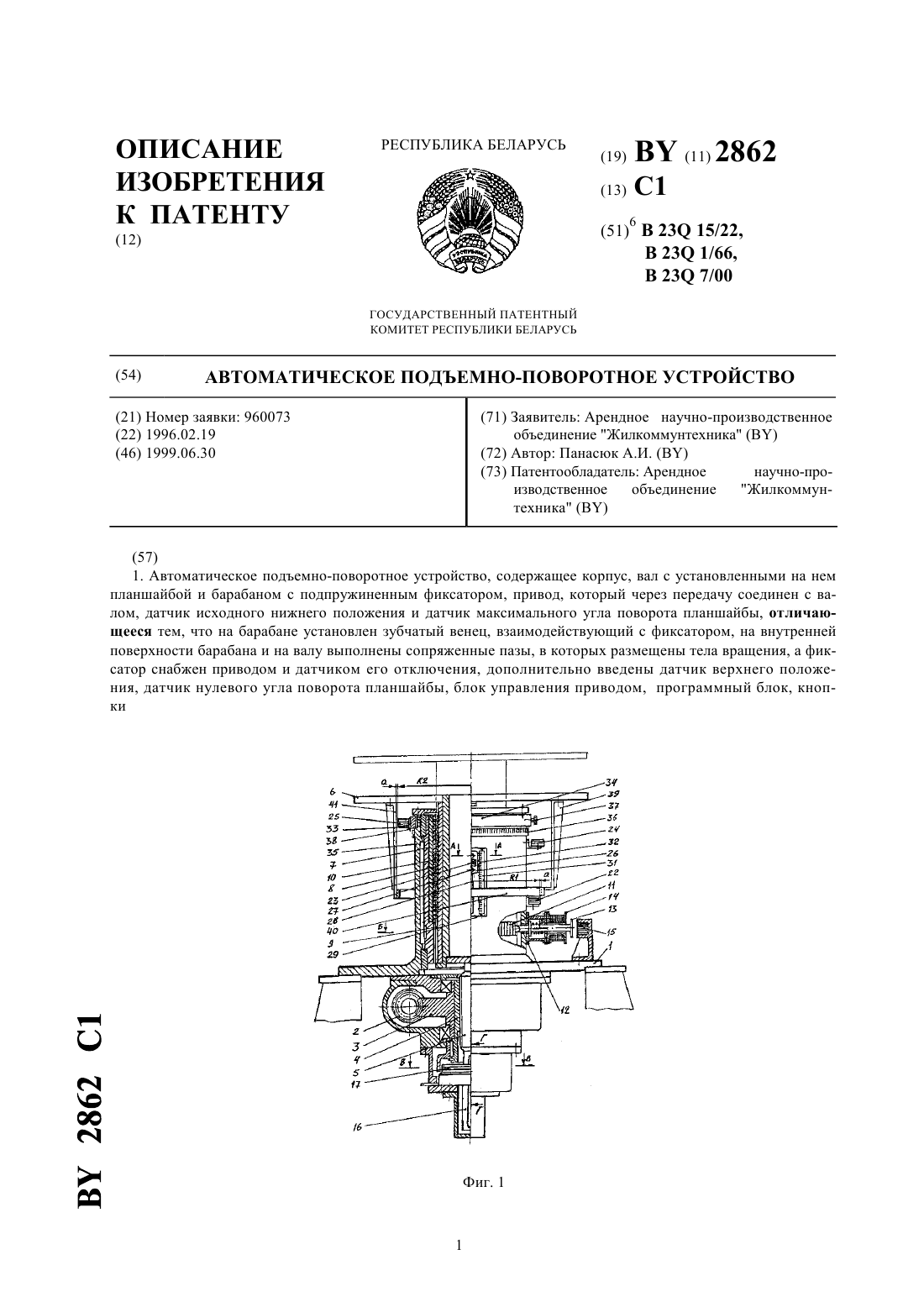
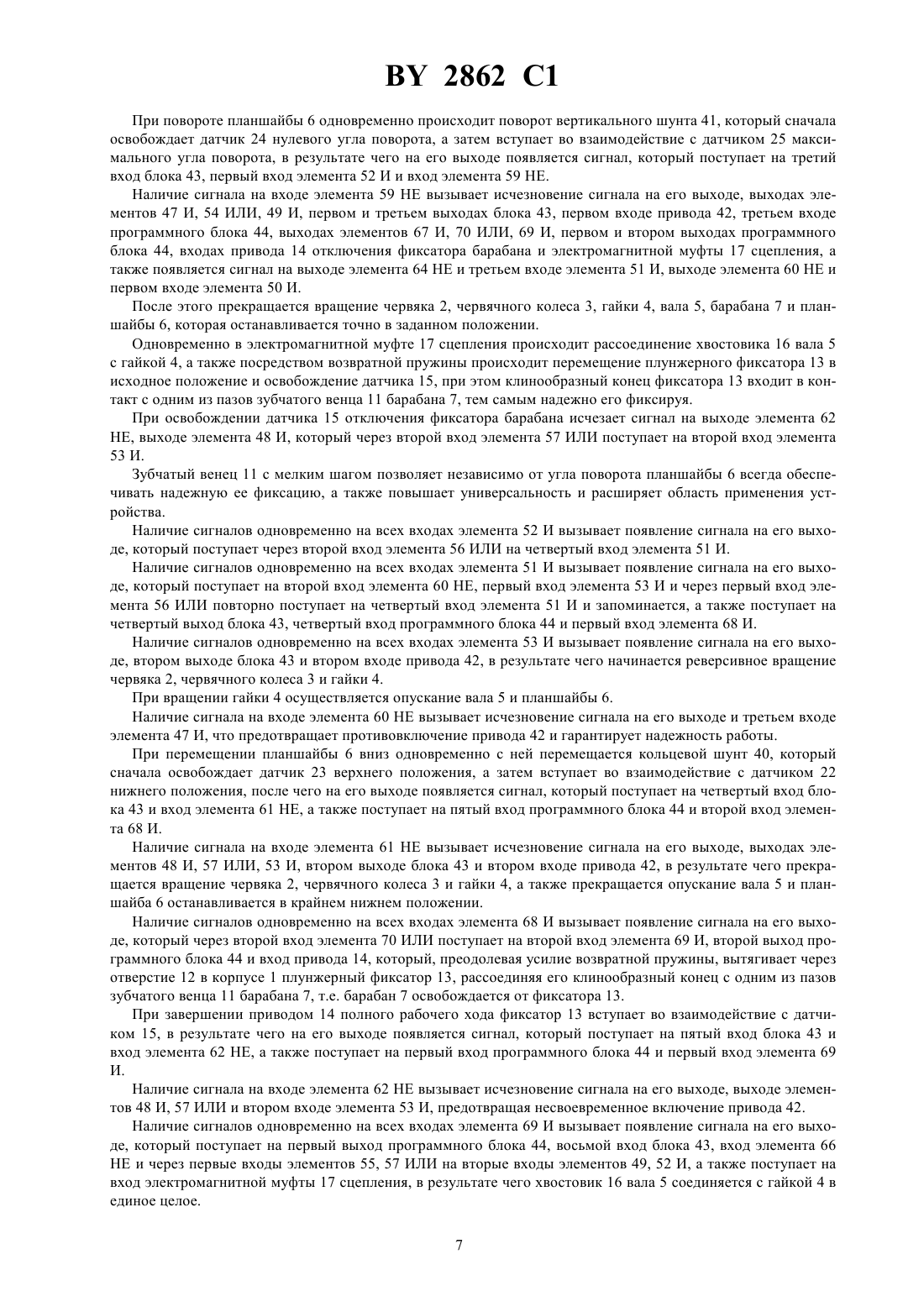
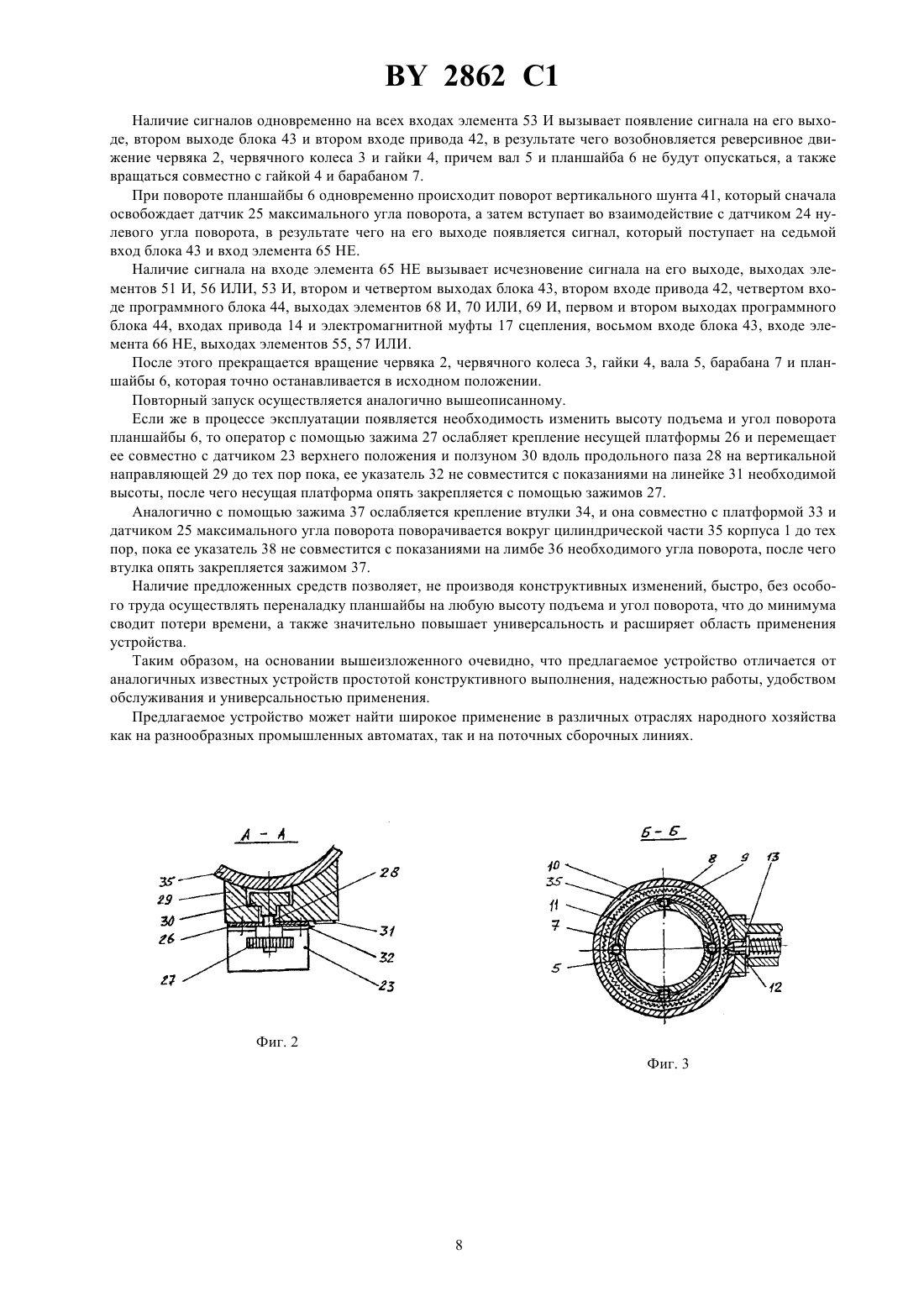
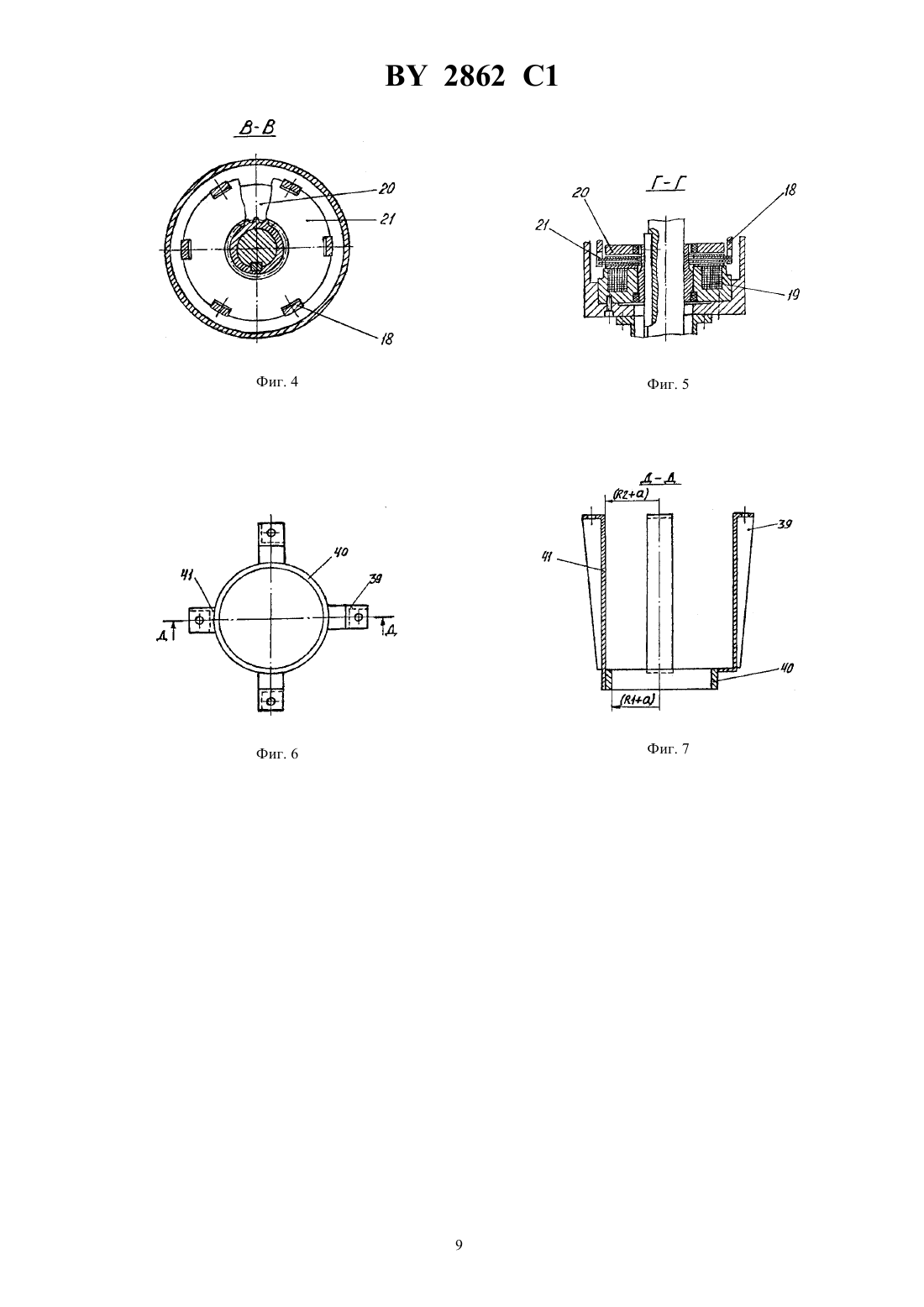
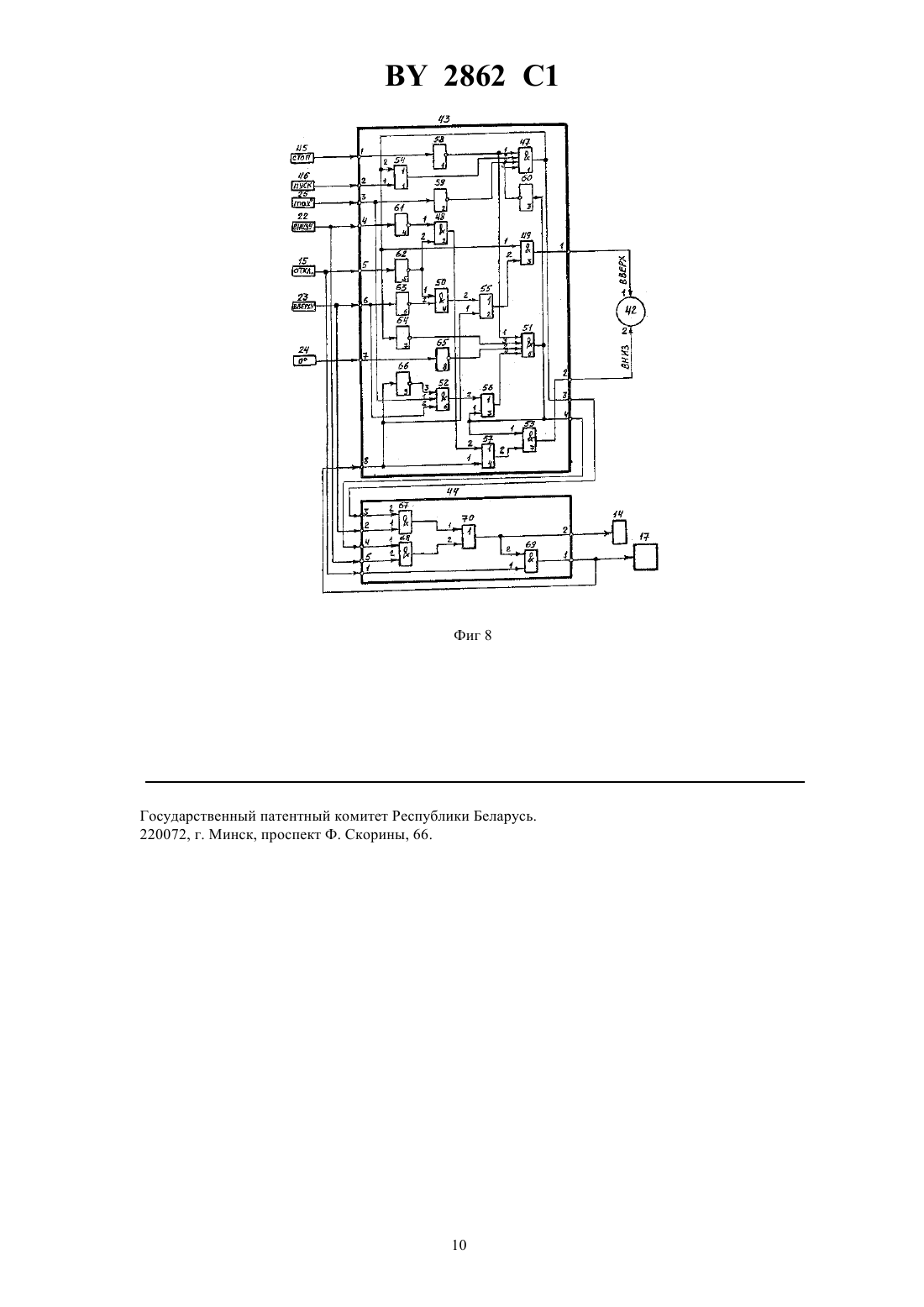
23 1/66, 23 7/00 ГОСУДАРСТВЕННЫЙ ПАТЕНТНЫЙ КОМИТЕТ РЕСПУБЛИКИ БЕЛАРУСЬ(57) 1. Автоматическое подъемно-поворотное устройство, содержащее корпус, вал с установленными на нем планшайбой и барабаном с подпружиненным фиксатором, привод, который через передачу соединен с валом, датчик исходного нижнего положения и датчик максимального угла поворота планшайбы, отличающееся тем, что на барабане установлен зубчатый венец, взаимодействующий с фиксатором, на внутренней поверхности барабана и на валу выполнены сопряженные пазы, в которых размещены тела вращения, а фиксатор снабжен приводом и датчиком его отключения, дополнительно введены датчик верхнего положения, датчик нулевого угла поворота планшайбы, блок управления приводом, программный блок, кнопки 2862 1 ПУСК и СТОП, при этом все датчики выполнены в виде бесконтактных индуктивных путевых переключателей и установлены на индивидуальных платформах, причем платформа датчика нулевого угла поворота и платформа датчика нижнего положения стационарно закреплены на цилиндрической части корпуса, платформа датчика верхнего положения установлена с возможностью перемещения вдоль цилиндрической части корпуса, платформа датчика максимального угла поворота установлена с возможностью поворота относительно цилиндрической части корпуса, при этом датчики нижнего и верхнего положений снабжены охватывающим цилиндрическую часть корпуса кольцевым шунтом, а датчики нулевого и максимального углов поворотавертикальным шунтом, причем вертикальный шунт внизу жестко связан с кольцевым шунтом, а вверху закреплен на планшайбе, приводной вал планшайбы в нижней части оснащен электромагнитной муфтой сцепления, при этом первый вход блока управления соединен с кнопкой СТОП, второй входс кнопкой ПУСК, третий входс выходом датчика максимального угла поворота, четвертый входс выходом датчика нижнего положения, пятый входс выходом датчика отключения фиксатора барабана и первым входом программного блока, шестой входс выходом датчика верхнего положения и вторым входом программного блока, седьмой входс выходом датчика нулевого угла поворота, восьмой входс первым выходом программного блока и входом электромагнитной муфты сцепления, первый и второй выходысоответственно с первым и вторым входами привода планшайбы, третий и четвертый выходысоответственно с третьим и четвертым входами программного блока, пятый вход которого соединен с четвертым входом блока управления и выходом датчика нижнего положения, второй выход программного блока соединен со входом привода отключения фиксатора барабана. 2. Устройство по п. 1, отличающееся тем, что платформа датчика верхнего положения планшайбы закреплена на вертикальной направляющей, в продольном пазу которой размещен е ползун, снабженный зажимами и указателем высоты подъема планшайбы, при этом на вертикальной направляющей установлена измерительная линейка. 3. Устройство по п. 1, отличающееся тем, что платформа датчика максимального угла поворота планшайбы закреплена на втулке, снабженной зажимом и указателем угла поворота планшайбы, а на цилиндрической части корпуса установлен жстко лимб и с возможностью поворота втулка. 4. Устройство по п. 1, отличающееся тем, что блок управления содержит семь элементов И, четыре элемента ИЛИ и девять элементов НЕ, причем первый вход блока управления соединен через первый элемент НЕ с первыми входами первого и пятого элементов И, второй входс первым входом первого элемента ИЛИ, третий входс первым входом шестого элемента И и через второй элемент НЕ со вторым входом первого элемента И, четвертый входчерез четвертый элемент НЕ с первым входом второго элемента И,пятый входчерез пятый элемент НЕ со вторым входом второго элемента И и первым входом четвертого элемента И, шестой входсо вторым входом шестого элемента И и через шестой элемент НЕ со вторым входом четвертого элемента И, седьмой входчерез восьмой элемент НЕ со вторым входом пятого элемента И, восьмой входс первыми входами второго и четвертого элементов ИЛИ, а также через девятый элемент НЕ с третьим входом шестого элемента И, первый выход блока управления соединен с выходом третьего элемента И, второй выходс выходом седьмого элемента И, третий выходс выходом первого элемента И, вторым входом первого элемента ИЛИ, первым входом третьего элемента И и через седьмой элемент НЕ с третьим входом пятого элемента И, а четвертый выходс выходом пятого элемента И, первым входом третьего элемента ИЛИ, первым входом седьмого элемента И и через третий элемент НЕ с третьим входом первого элемента И, четвертый вход которого соединен с выходом первого элемента ИЛИ,второй вход второго элемента ИЛИ соединен с выходом четвертого элемента И, а выходсо вторым входом третьего элемента И, второй вход третьего элемента ИЛИ соединен с выходом шестого элемента И, а выходс четвертым входом пятого элемента И, второй вход четвертого элемента ИЛИ соединен с выходом второго элемента И, а выходсо вторым входом седьмого элемента И. 5. Устройство по п. 1, отличающееся тем, что программный блок содержит один элемент ИЛИ и три элемента И, причем первый вход программного блока соединен с первым входом третьего элемента И, второй и третий входысоответственно с первым и вторым входами первого элемента И, четвертый и пятый входысоответственно с первым и вторым входами второго элемента И, первый выход программного блока соединен с выходом третьего элемента И, второй выходсо вторым входом третьего элемента И и выходом элемента ИЛИ, первый вход которого соединен с выходом первого элемента И, а второй входс выходом второго элемента И. Изобретение относится к автоматическим транспортно-загрузочным устройствам, используемым в транспортных системах автоматических линий и автоматизированных участков. 2 2862 1 Известно автоматическое подъемно-поворотное устройство для транспортных систем автоматизированных линий 1, содержащее корпус, двигатель, передачу и вал, несущую планшайбу и барабан с пазами,взаимодействующий с двумя подпружиненными плунжерами и датчиками исходного нижнего положения и максимального угла поворота планшайбы, а также снабженного кулачковым узлом сцепления. Однако это устройство имеет следующие недостатки. Во-первых, при наличии предложенной системы сцепления кулачки воспринимают удары и резкие рывки, в результате чего быстро выходят из строя исполнительные механизмы, снижается их надежность и долговечность. Кроме того, из-за резких рывков происходят смещения расположенных на планшайбе транспортируемых грузов, что в отдельных случаях недопустимо, в результате чего ограничиваются возможности применения таких устройств. Во-вторых, очень сложная система фиксации барабана, которая кроме того не позволяет переналаживать планшайбу на разную высоту подъема и разный угол поворота, что также снижает надежность работы и значительно ограничивает возможности применения устройства. В-третьих, отсутствует система диагностики рабочего состояния исполнительных механизмов и правильного их функционирования и отсутствует система мгновенного реагирования при отклонениях от нормы. Известно также автоматическое подъемно-поворотное устройство для транспортных систем автоматизированных линий 2, содержащее корпус, червяк, кинематически связанный с приводом и червячным колесом, жестко закрепленным на гайке, вал, ввернутый в гайку и имеющий на верхнем конце планшайбу для установки груза, а между планшайбой и гайкой - барабан с подпружиненными плунжерными фиксаторами и кулачковым узлом сцепления, датчик исходного нижнего положения и датчик максимального угла поворота планшайбы. Это устройство ближе всего к изобретению по технической сущности и достигаемому результату, однако оно имеет те же недостатки, что и предыдущее. Задачей изобретения является обеспечение переналаживаемости подъема планшайбы устройства на требуемые высоту и угол поворота, чтобы расширить функциональные возможности устройства без снижения надежности и ресурса его работы. Поставленная задача решена за счет того, что в автоматическом подъемно-поворотном устройстве, содержащем корпус, вал с установленными на нем планшайбой и барабаном с подпружиненным фиксатором,привод, который через передачу соединен с валом, датчик исходного нижнего положения и датчик максимального угла поворота планшайбы, в соответствии с изобретением на барабане установлен зубчатый венец,взаимодействующий с фиксатором, на внутренней поверхности барабана и на валу выполнены сопряженные пазы, в которых размещены тела вращения, а фиксатор снабжен приводом и датчиком его отключения, дополнительно введены датчик верхнего положения, датчик нулевого угла поворота планшайбы, блок управления приводом, программный блок, кнопки ПУСК и СТОП, при этом все датчики выполнены в виде бесконтактных индуктивных путевых переключателей и установлены на индивидуальных платформах, причем платформа датчика нулевого угла поворота и платформа датчика нижнего положения стационарно закреплены на цилиндрической части корпуса, платформа датчика верхнего положения установлена с возможностью перемещения вдоль цилиндрической части корпуса, а платформа датчика максимального угла поворота установлена с возможностью поворота относительно цилиндрической части корпуса. При этом датчики нижнего и верхнего положений снабжены охватывающим цилиндрическую часть корпуса кольцевым шунтом, а датчики нулевого и максимального углов поворота - вертикальным шунтом, причем вертикальный шунт внизу жестко связан с кольцевым шунтом, а вверху закреплен на планшайбе, приводной вал планшайбы в нижней части оснащен электромагнитной муфтой сцепления, при этом первый вход блока управления соединен с кнопкой СТОП, второй вход - с кнопкой ПУСК, третий вход - с выходом датчика максимального угла поворота, четвертый вход - с выходом датчика нижнего положения, пятый вход - с выходом датчика отключения фиксатора барабана и первым входом программного блока, шестой вход - с выходом датчика верхнего положения и вторым входом программного блока, седьмой вход - с выходом датчика нулевого угла поворота, восьмой вход - с первым выходом программного блока и входом электромагнитной муфты сцепления, первый и второй выходы - соответственно с первым и вторым входами привода планшайбы, третий и четвертый выходы - соответственно с третьим и четвертым входами программного блока, пятый вход которого соединен с четвертым входом блока управления и выходом датчика нижнего положения, второй выход программного блока соединен со входом привода отключения фиксатора барабана. Кроме того, платформа датчика верхнего положения планшайбы закреплена на вертикальной направляющей, в продольном пазу которой размещен ее ползун, снабженный зажимами и указателем высоты подъема планшайбы, при этом на вертикальной направляющей установлена измерительная линейка. 2862 1 Платформа датчика максимального угла поворота планшайбы закреплена на втулке, снабженной зажимом и указателем угла поворота планшайбы, а на цилиндрической части корпуса установлен жестко лимб и с возможностью поворота втулка. Блок управления при этом содержит семь элементов И, четыре элемента ИЛИ и девять элементов НЕ,причем первый вход блока управления соединен через первый элемент НЕ с первыми входами первого и пятого элементов И, второй вход - с первым входом первого элемента ИЛИ, третий вход - с первым входом шестого элемента И и через второй элемент НЕ со вторым входом первого элемента И, четвертый вход - через четвертый элемент НЕ с первым входом второго элемента И, пятый вход - через пятый элемент НЕ со вторым входом второго элемента И и первым входом четвертого элемента И, шестой вход - со вторым входом шестого элемента И и через шестой элемент НЕ со вторым входом четвертого элемента И, седьмой вход- через восьмой элемент НЕ со вторым входом пятого элемента И, восьмой вход - с первыми входами второго и четвертого элементов ИЛИ, а также через девятый элемент НЕ с третьим входом шестого элемента И. При этом первый выход блока управления соединен с выходом третьего элемента И, второй выход - с выходом седьмого элемента И, третий выход - с выходом первого элемента И, вторым входом первого элемента ИЛИ, первым входом третьего элемента И и через седьмой элемент НЕ с третьим входом пятого элемента И,а четвертый выход - с выходом пятого элемента И, первым входом третьего элемента ИЛИ, первым входом седьмого элемента И и через третий элемент НЕ с третьим входом первого элемента И, четвертый вход которого соединен с выходом первого элемента ИЛИ, второй вход второго элемента ИЛИ соединен с выходом четвертого элемента И, а выход - со вторым входом третьего элемента И, второй вход третьего элемента ИЛИ соединен с выходом шестого элемента И, а выход - с четвертым входом пятого элемента И, второй вход четвертого элемента ИЛИ соединен с выходом второго элемента И, а выход - со вторым входом седьмого элемента И. Кроме того, программный блок содержит один элемент ИЛИ и три элемента И, причем первый вход программного блока соединен с первым входом третьего элемента И, второй и третий входы - соответственно с первым и вторым входами первого элемента И, четвертый и пятый входы - соответственно с первым и вторым входами второго элемента И, первый выход программного блока соединен с выходом третьего элемента И, второй выход - со вторым входом третьего элемента И и выходом элемента ИЛИ, первый вход которого соединен с выходом первого элемента И, а второй вход - с выходом второго элемента И. Благодаря предложенному выполнению электросистемы и логических блоков удалось полностью реализовать заданную программу автоматического пооперационного управления с учетом автоматического обеспечения диагностики правильного функционирования исполнительных механизмов и мгновенного реагирования при отклонениях от нормы, что гарантирует исключение аварийных ситуаций, способствует повышению надежности и увеличению ресурса работы устройства. Сопоставительный анализ с прототипом показал, что заявляемое устройство отличается как конструктивным выполнением отдельных узлов (фиксатора, сцепления, приводного вала планшайбы, задатчиков высоты подъема и угла поворота планшайбы), так и функционально- логическим выполнением системы управления. Таким образом, заявляемое изобретение соответствует критерию новизна. Сравнение заявляемого решения не только с прототипом, но и с другими известными в данной области техническими решениями не подтвердило известности влияния отличительных признаков предлагаемого устройства на указанный заявителем технический результат, что позволяет сделать вывод о том, что данное техническое решение соответствует критерию изобретательский уровень. Критерий промышленная применимость подтверждается приведенным ниже конкретным описанием устройства. На фиг. 1 изображено предлагаемое устройство, общий вид на фиг. 2 - механизм регулирования высоты подъема планшайбы, разрез А-А на фиг. 1 на фиг. 3 - устройство фиксатора и соединительного узла барабана и приводного вала планшайбы, разрез Б-Б на фиг. 1 на фиг. 4 - устройство электромагнитной муфты сцепления, разрез В-В на фиг. 1 на фиг. 5 - то же, разрез Г-Г на фиг. 1 на фиг. 6 - конструктивное выполнение шунтов для датчиков верхнего и нижнего положений, нулевого и максимального углов поворота планшайбы,вид сверху на фиг. 7 - то же, разрез Д -Д на фиг. 6 на фиг. 8 - функциональная схема системы автоматического управления устройством. Предлагаемое автоматическое подъемно-поворотное устройство содержит корпус 1, червяк 2, кинематически связанный с приводом (на чертеже не показан) и червячным колесом 3, жестко закрепленным на гайке 4, в которую ввернут вал 5. На верхнем конце вала 5 закреплена планшайба 6 для установки груза, а между планшайбой 6 и гайкой 4 закреплен барабан 7. На внутренней поверхности барабана 7 и на валу 5 выполнены сопряженные пазы 8, 9, в которых размещены тела вращения 10, например шарики или ролики. На барабане 7 имеется зубчатый венец 11, взаимодействующий с проходящим через отверстие 12 корпуса 1 свободным клинообразным концом подпружиненного фиксатора 13, который снабжен приводом 14 (например, электромагнитным) и датчиком 15 его отключения. 4 2862 1 Внизу вала 5 на хвостовике 16 расположена электромагнитная муфта 17 сцепления, взаимодействующая с гайкой 4 посредством поводка 18(см. фиг. 4, 5). Электромагнитная муфта 17 (см. фиг. 4, 5) сцепления состоит из 3-х основных элементов электромагнита 19, внутреннего магнитопроводящего диска 20 и наружного магнитопроводящего диска 21, взаимодействующего с поводком 18. Планшайба 6 снабжена датчиками 22 исходного нижнего и 23 верхнего положений,датчиками 24 нулевого и 25 максимального углов поворота. Датчик 23 верхнего положения закреплен на несущей платформе 26, которая посредством зажимов 27,проходящих через продольный паз 28 вертикальной направляющей 29, соединена с ползуном 30. На вертикальной направляющей 29 расположена измерительная линейка 31 с градуировкой высоты подъема планшайбы 6, на несущей платформе 26 закреплен указатель 32 высоты подъема планшайбы 6. Датчик 25 максимального угла поворота планшайбы 6 расположен на платформе 33, жестко соединенной с втулкой 34, установленной с возможностью вращения вокруг цилиндрической части 35 корпуса 1. На цилиндрической части 35 расположена измерительная линейка 36 (лимб) с градуировкой угла поворота планшайбы 6, а на втулке 34 имеется зажим 37 и указатель 38 угла поворота планшайбы 6. Датчик 24 нулевого угла поворота расположен с другой стороны измерительной линейки 36 и закреплен на цилиндрической части 35 корпуса 1, датчик 22 нижнего положения и вертикальная направляющая 29 совместно с датчиком 23 верхнего положения расположены ниже датчика 24 нулевого угла поворота и также закреплены на цилиндрической части 35 корпуса 1. Датчики 22 нижнего и 23 верхнего положений планшайбы расположены относительно оси ее вращения на расстоянии 1, а датчики 24 нулевого и 25 максимального углов поворота - на расстоянии 2, при этом 21. На планшайбе 6 посредством держателей 39 закреплен кольцевой шунт 40 для датчиков 22 нижнего и 23 верхнего положений и вертикальный шунт 41 для датчиков 24 нулевого и 25 максимального углов поворота, причем кольцевой шунт 40 расположен относительно оси вращения планшайбы на расстоянии 1,а вертикальный шунт 41 - на расстоянии 2, при этом расстояние а соответствует зоне чувствительности вышеупомянутых бесконтактных датчиков (например индуктивных), а расстояние между вертикальным шунтом 41 и кольцевым шунтом 40 превышает зону чувствительности бесконтактных датчиков, т. е. (21). Функциональная схема системы управления устройством включает в себя привод 14 отключения фиксатора, датчик 15 отключения фиксатора, электромагнитную муфту 17 сцепления, датчики 22 нижнего и 23 верхнего положений и датчики 24 нулевого и 25 максимального углов поворота планшайбы, привод 42 планшайбы с блоком управления 43 приводом планшайбы, программный блок 44, кнопки 45 СТОП и 46 ПУСК, при этом первый вход блока управления 43 соединен с кнопкой 45 СТОП, второй вход - с кнопкой 46 ПУСК, третий вход - с выходом датчика 25 максимального угла поворота, четвертый вход - с выходом датчика 22 нижнего положения, пятый вход - с выходом датчика 15 отключения фиксатора барабана и первым входом программного блока 44, шестой вход - с выходом датчика 23 верхнего положения и вторым входом программного блока 44, седьмой вход - с выходом датчика 24 нулевого угла поворота, восьмой вход- с первым выходом программного блока 44 и входом электромагнитной муфты 17 сцепления, а первый выход - с первым входом привода 42, второй выход - со вторым входом привода 42, третий выход - с третьим входом программного блока 44, четвертый выход - с четвертым входом программного блока 44, а его второй выход соединен с четвертым входом блока 43 и выходом датчика 22 нижнего положения планшайбы. Блок 43 управления содержит элементы 47, 48, 49, 50, 51, 52, 53 И, элементы 54, 55, 56, 57 ИЛИ и элементы 58, 59, 60, 61, 62, 63, 64, 65, 66 НЕ, при этом первый вход блока 43 через элемент 58 НЕ соединен с первыми входами элементов 47, 51 И, второй вход - с первым входом элемента 54 ИЛИ, третий вход - с первым входом элемента 52 И и через элемент 59 НЕ со вторым входом элемента 47 И, четвертый вход - через элемент 61 НЕ с первым входом элемента 48 И, пятый вход - через элемент 62 НЕ со вторым входом элемента 48 И и первым входом элемента 50 И, шестой вход - со вторым входом элемента 52 И и через элемент 63 НЕ со вторым входом элемента 50 И, седьмой вход - через элемент 65 НЕ со вторым входом элемента 51 И, восьмой вход - с первым входом элемента 55 ИЛИ, первым входом элемента 57 ИЛИ и через элемент 66 НЕ с третьим входом элемента 52 И, а первый выход - с выходом элемента 49 И, второй выход - с выходом элемента 53 И, третий выход - с выходом элемента 47 И, вторым входом элемента 54 ИЛИ и первым входом элемента 49 И, а также через элемент 64 НЕ с третьим входом элемента 51 И, четвертый выход - с выходом элемента 51 И, первым входом элемента 56 ИЛИ, первым входом элемента 53 И и через элемент 60 НЕ с третьим входом элемента 47 И, причем в элементе 54 ИЛИ выход соединен с четвертым входом элемента 47 И, в элементе 55 ИЛИ второй вход соединен с выходом элемента 50 И, а выход - со вторым входом элемента 49 И, в элементе 56 ИЛИ второй вход соединен с выходом элемента 52 И, а выход - с четвертым входом элемента 51 И, в элементе 57 ИЛИ второй вход соединен с выходом элемента 48 И, а выход - со вторым входом элемента 53 И. Программный блок 44 содержит элементы 67, 68, 69 И и элемент 70 ИЛИ, причем первый вход блока соединен с первым входом элемента 69 И, второй и третий входы - соответственно с первым и вторым входа 5 2862 1 ми элемента 67 И, четвертый и пятый входы - соответственно с первым и вторым входами элемента 68 И,первый выход - с выходом элемента 69 И и второй выход - со вторым входом элемента 69 И и выходом элемента 70 ИЛИ, первый вход которого соединен с выходом элемента 67 И, а второй вход - с выходом элемента 68 И. Автоматическое подъемно-поворотное устройство работает следующим образом. Проверив готовность оборудования и правильность расположения механизмов в исходном положении(кольцевой шунт 40 находится во взаимодействии с датчиком 22 нижнего положения, и на его выходе, а также на четвертом входе блока 43 и пятом входе программного блока 44 имеется сигнал вертикальный шунт 41 находится во взаимодействии с датчиком 24 нулевого угла поворота, и на его выходе и седьмом входе блока 43 также имеется сигнал), оператор при наличии груза на планшайбе 6 воздействует на кнопку 46 ПУСК, в результате чего на ее выходе появляется сигнал, который поступает на второй вход блока 43 и через первый вход элемента 54 ИЛИ поступает на четвертый вход элемента 47 И. Наличие сигналов одновременно на всех входах элемента 47 И вызывает появление сигнала на его выходе, который повторно поступает через второй вход элемента 54 ИЛИ на собственный четвертый вход и запоминается, а также поступает на первый вход элемента 49 И, вход элемента 64 НЕ, третий выход блока 43,третий вход программного блока 44 и второй вход элемента 67 И. Наличие сигналов одновременно на всех входах элемента 49 И вызывает появление сигнала на его выходе, первом выходе блока 43 и первом входе привода 42, в результате чего начинает вращаться червяк 2, червячное колесо 3 и гайка 4. При вращении гайка 4 начинает поднимать вал 5 и планшайбу 6 с грузом. Вал 5 от поворота удерживается подпружиненным плунжерным фиксатором 13, клинообразный конец которого находится в контакте с зубчатым венцом 11 на барабане 7. Тела вращения 10 (шарики или ролики), помещенные в пазах 8 барабана и соответствующих пазах 9 вала 5, выполняют две функции функцию подшипников качения при перемещении вала относительно барабана и функцию шпонок при вращательном перемещении вала совместно с барабаном в горизонтальной плоскости. Наличие сигнала на входе элемента 64 НЕ вызывает исчезновение сигнала на его выходе и третьем входе элемента 51 И, что исключает противовключение привода устройства и гарантирует надежность работы. При подъеме вала 5 также осуществляется подъем планшайбы 6, кольцевого 40 и вертикального 41 шунтов. При достижении планшайбой 6 заданного верхнего положения кольцевой шунт 40 вступает во взаимодействие с датчиком 23 верхнего положения, в результате чего появляется сигнал на его выходе, шестом входе блока 43, входе элемента 63 НЕ и втором входе элемента 52 И, а также на втором входе программного блока 44 и первом входе элемента 67 И. Наличие сигнала на входе элемента 63 НЕ вызывает исчезновение сигнала на его выходе, выходах элементов 49, 50 И, первом выходе блока 43 и первом входе привода 42, в результате чего прекращается вращение червяка 2, червячного колеса 3 и гайки 4, а также прекращается подъем вала 5 и планшайба 6 останавливается точно в заданном верхнем положении. Наличие сигналов одновременно на всех входах элемента 67 И вызывает появление сигнала на его выходе, который через первый вход элемента 70 ИЛИ поступает на второй вход элемента 69 И, второй выход программного блока 44 и вход привода 14, который, преодолевая усилие возвратной пружины, вытягивает через отверстие 12 в корпусе 1 плунжерный фиксатор 13, рассоединяя его клинообразный конец с зубчатым венцом 11 барабана 7, т.е. барабан 7 освобождается от фиксатора 13. При завершении приводом 14 полного рабочего хода фиксатор 13 вступает во взаимодействие с датчиком 15, в результате чего на его выходе появляется сигнал, который поступает на пятый вход блока 43 и вход элемента 63 НЕ, а также поступает на первый вход программного блока 44 и первый вход элемента 69 И. Наличие сигнала на входе элемента 62 НЕ вызывает исчезновение сигнала на его выходе, выходе элемента 50 И, предотвращая несвоевременное включение привода 42. Наличие сигналов одновременно на всех входах элемента 69 И вызывает появление сигнала на его выходе, втором выходе программного блока 44, восьмом входе блока 43, входе элемента 99 НЕ, первых входах элементов 55, 57 ИЛИ и вторых входах элементов 49, 53 И, а также на входе электромагнитной муфты 17 сцепления, в результате чего хвостовик 16 вала 5 соединяется с гайкой 4 в единое целое. Наличие сигналов одновременно на всех входах элемента 49 И вызывает появление сигнала на его выходе, первом выходе блока 43 и первом входе привода 42, в результате чего начинает повторно в ту же сторону вращаться червяк 2, червячное колесо 3 и гайка 4, при этом вал 5 и планшайба 6 не будут приподниматься, а станут вращаться совместно с гайкой 4 и барабаном 7, причем из-за наличия электромагнитной муфты 17 сцепления полностью исключаются рывки и динамические удары, т.е. обеспечивается плавность движения и высокая надежность работы, а также исключаются смещения груза на планшайбе 6 и гарантируется точность его доставки в пункт назначения (например, на рабочую позицию сборочного автомата). 6 2862 1 При повороте планшайбы 6 одновременно происходит поворот вертикального шунта 41, который сначала освобождает датчик 24 нулевого угла поворота, а затем вступает во взаимодействие с датчиком 25 максимального угла поворота, в результате чего на его выходе появляется сигнал, который поступает на третий вход блока 43, первый вход элемента 52 И и вход элемента 59 НЕ. Наличие сигнала на входе элемента 59 НЕ вызывает исчезновение сигнала на его выходе, выходах элементов 47 И, 54 ИЛИ, 49 И, первом и третьем выходах блока 43, первом входе привода 42, третьем входе программного блока 44, выходах элементов 67 И, 70 ИЛИ, 69 И, первом и втором выходах программного блока 44, входах привода 14 отключения фиксатора барабана и электромагнитной муфты 17 сцепления, а также появляется сигнал на выходе элемента 64 НЕ и третьем входе элемента 51 И, выходе элемента 60 НЕ и первом входе элемента 50 И. После этого прекращается вращение червяка 2, червячного колеса 3, гайки 4, вала 5, барабана 7 и планшайбы 6, которая останавливается точно в заданном положении. Одновременно в электромагнитной муфте 17 сцепления происходит рассоединение хвостовика 16 вала 5 с гайкой 4, а также посредством возвратной пружины происходит перемещение плунжерного фиксатора 13 в исходное положение и освобождение датчика 15, при этом клинообразный конец фиксатора 13 входит в контакт с одним из пазов зубчатого венца 11 барабана 7, тем самым надежно его фиксируя. При освобождении датчика 15 отключения фиксатора барабана исчезает сигнал на выходе элемента 62 НЕ, выходе элемента 48 И, который через второй вход элемента 57 ИЛИ поступает на второй вход элемента 53 И. Зубчатый венец 11 с мелким шагом позволяет независимо от угла поворота планшайбы 6 всегда обеспечивать надежную ее фиксацию, а также повышает универсальность и расширяет область применения устройства. Наличие сигналов одновременно на всех входах элемента 52 И вызывает появление сигнала на его выходе, который поступает через второй вход элемента 56 ИЛИ на четвертый вход элемента 51 И. Наличие сигналов одновременно на всех входах элемента 51 И вызывает появление сигнала на его выходе, который поступает на второй вход элемента 60 НЕ, первый вход элемента 53 И и через первый вход элемента 56 ИЛИ повторно поступает на четвертый вход элемента 51 И и запоминается, а также поступает на четвертый выход блока 43, четвертый вход программного блока 44 и первый вход элемента 68 И. Наличие сигналов одновременно на всех входах элемента 53 И вызывает появление сигнала на его выходе, втором выходе блока 43 и втором входе привода 42, в результате чего начинается реверсивное вращение червяка 2, червячного колеса 3 и гайки 4. При вращении гайки 4 осуществляется опускание вала 5 и планшайбы 6. Наличие сигнала на входе элемента 60 НЕ вызывает исчезновение сигнала на его выходе и третьем входе элемента 47 И, что предотвращает противовключение привода 42 и гарантирует надежность работы. При перемещении планшайбы 6 вниз одновременно с ней перемещается кольцевой шунт 40, который сначала освобождает датчик 23 верхнего положения, а затем вступает во взаимодействие с датчиком 22 нижнего положения, после чего на его выходе появляется сигнал, который поступает на четвертый вход блока 43 и вход элемента 61 НЕ, а также поступает на пятый вход программного блока 44 и второй вход элемента 68 И. Наличие сигнала на входе элемента 61 НЕ вызывает исчезновение сигнала на его выходе, выходах элементов 48 И, 57 ИЛИ, 53 И, втором выходе блока 43 и втором входе привода 42, в результате чего прекращается вращение червяка 2, червячного колеса 3 и гайки 4, а также прекращается опускание вала 5 и планшайба 6 останавливается в крайнем нижнем положении. Наличие сигналов одновременно на всех входах элемента 68 И вызывает появление сигнала на его выходе, который через второй вход элемента 70 ИЛИ поступает на второй вход элемента 69 И, второй выход программного блока 44 и вход привода 14, который, преодолевая усилие возвратной пружины, вытягивает через отверстие 12 в корпусе 1 плунжерный фиксатор 13, рассоединяя его клинообразный конец с одним из пазов зубчатого венца 11 барабана 7, т.е. барабан 7 освобождается от фиксатора 13. При завершении приводом 14 полного рабочего хода фиксатор 13 вступает во взаимодействие с датчиком 15, в результате чего на его выходе появляется сигнал, который поступает на пятый вход блока 43 и вход элемента 62 НЕ, а также поступает на первый вход программного блока 44 и первый вход элемента 69 И. Наличие сигналана входе элемента 62 НЕ вызывает исчезновение сигнала на его выходе, выходе элементов 48 И, 57 ИЛИ и втором входе элемента 53 И, предотвращая несвоевременное включение привода 42. Наличие сигналов одновременно на всех входах элемента 69 И вызывает появление сигнала на его выходе, который поступает на первый выход программного блока 44, восьмой вход блока 43, вход элемента 66 НЕ и через первые входы элементов 55, 57 ИЛИ на вторые входы элементов 49, 52 И, а также поступает на вход электромагнитной муфты 17 сцепления, в результате чего хвостовик 16 вала 5 соединяется с гайкой 4 в единое целое. 7 2862 1 Наличие сигналов одновременно на всех входах элемента 53 И вызывает появление сигнала на его выходе, втором выходе блока 43 и втором входе привода 42, в результате чего возобновляется реверсивное движение червяка 2, червячного колеса 3 и гайки 4, причем вал 5 и планшайба 6 не будут опускаться, а также вращаться совместно с гайкой 4 и барабаном 7. При повороте планшайбы 6 одновременно происходит поворот вертикального шунта 41, который сначала освобождает датчик 25 максимального угла поворота, а затем вступает во взаимодействие с датчиком 24 нулевого угла поворота, в результате чего на его выходе появляется сигнал, который поступает на седьмой вход блока 43 и вход элемента 65 НЕ. Наличие сигнала на входе элемента 65 НЕ вызывает исчезновение сигнала на его выходе, выходах элементов 51 И, 56 ИЛИ, 53 И, втором и четвертом выходах блока 43, втором входе привода 42, четвертом входе программного блока 44, выходах элементов 68 И, 70 ИЛИ, 69 И, первом и втором выходах программного блока 44, входах привода 14 и электромагнитной муфты 17 сцепления, восьмом входе блока 43, входе элемента 66 НЕ, выходах элементов 55, 57 ИЛИ. После этого прекращается вращение червяка 2, червячного колеса 3, гайки 4, вала 5, барабана 7 и планшайбы 6, которая точно останавливается в исходном положении. Повторный запуск осуществляется аналогично вышеописанному. Если же в процессе эксплуатации появляется необходимость изменить высоту подъема и угол поворота планшайбы 6, то оператор с помощью зажима 27 ослабляет крепление несущей платформы 26 и перемещает ее совместно с датчиком 23 верхнего положения и ползуном 30 вдоль продольного паза 28 на вертикальной направляющей 29 до тех пор пока, ее указатель 32 не совместится с показаниями на линейке 31 необходимой высоты, после чего несущая платформа опять закрепляется с помощью зажимов 27. Аналогично с помощью зажима 37 ослабляется крепление втулки 34, и она совместно с платформой 33 и датчиком 25 максимального угла поворота поворачивается вокруг цилиндрической части 35 корпуса 1 до тех пор, пока ее указатель 38 не совместится с показаниями на лимбе 36 необходимого угла поворота, после чего втулка опять закрепляется зажимом 37. Наличие предложенных средств позволяет, не производя конструктивных изменений, быстро, без особого труда осуществлять переналадку планшайбы на любую высоту подъема и угол поворота, что до минимума сводит потери времени, а также значительно повышает универсальность и расширяет область применения устройства. Таким образом, на основании вышеизложенного очевидно, что предлагаемое устройство отличается от аналогичных известных устройств простотой конструктивного выполнения, надежностью работы, удобством обслуживания и универсальностью применения. Предлагаемое устройство может найти широкое применение в различных отраслях народного хозяйства как на разнообразных промышленных автоматах, так и на поточных сборочных линиях. Государственный патентный комитет Республики Беларусь. 220072, г. Минск, проспект Ф. Скорины, 66.
МПК / Метки
МПК: B23Q 15/22, B23Q 1/66, B23Q 7/00
Метки: устройство, подъемно-поворотное, автоматическое
Код ссылки
<a href="https://by.patents.su/10-2862-avtomaticheskoe-podemno-povorotnoe-ustrojjstvo.html" rel="bookmark" title="База патентов Беларуси">Автоматическое подъемно-поворотное устройство</a>
Устройство для сложения четверичных цифр
Номер патента: 2629
Опубликовано: 30.03.1999
Авторы: Курносенко Сергей Васильевич, Авгуль Леонид Болеславович, Петроченко Андрей Сергеевич, Супрун Валерий Павлович
МПК: G06F 7/50
Метки: четверичных, сложения, устройство, цифр
Текст:
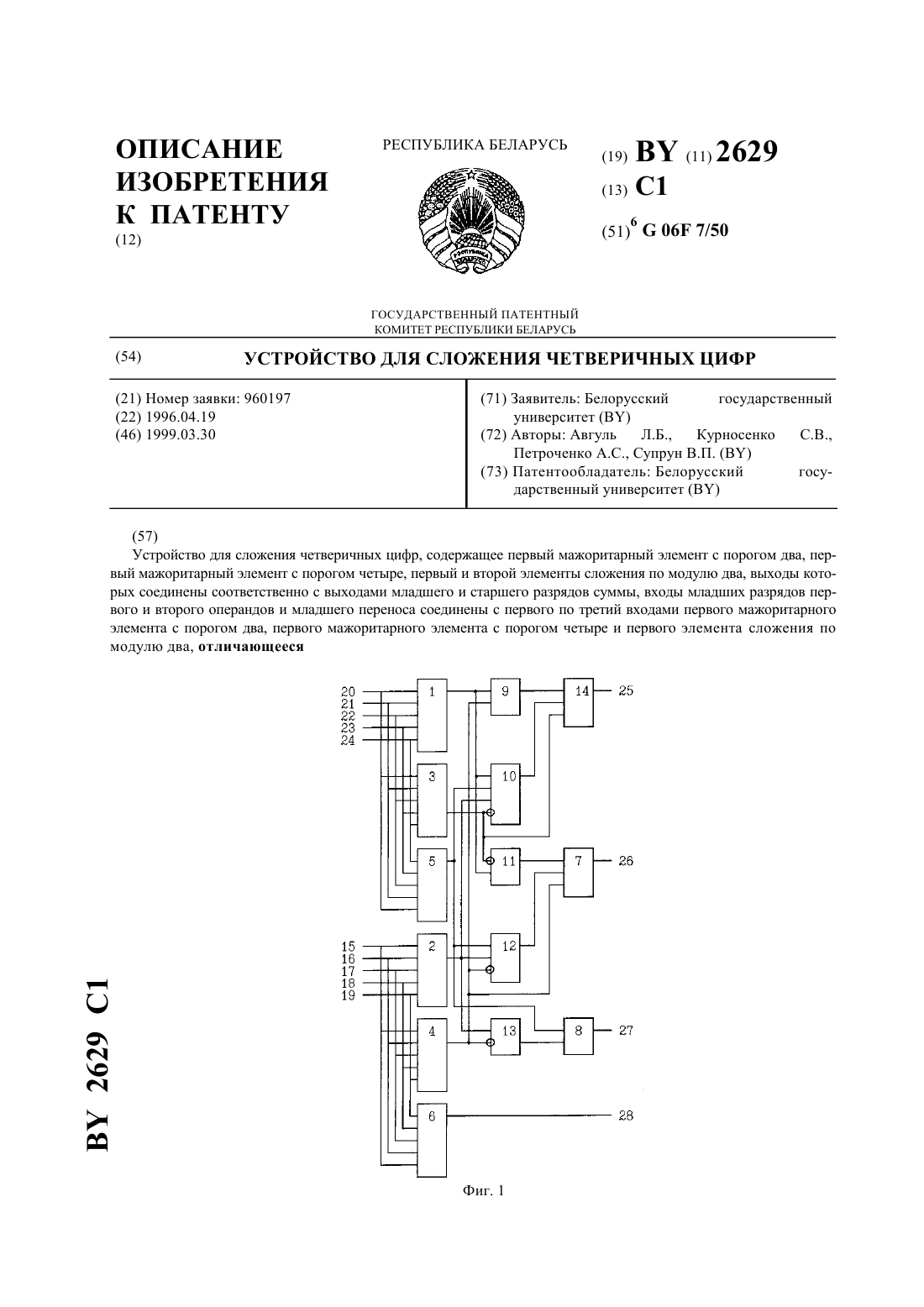
...по модулю два, выходы которых соединены соответственно с выходами младшего и старшего разрядов суммы, входы младших разрядов первого и второго операндов и младшего переноса соединены с входами с первого по третий первого мажоритарного элемента с порогом два, первого мажоритарного элемента с порогом четыре и первого элемента сложения по модулю два, согласно изобретению дополнительно введены второй мажоритарный элемент с порогом два,...
Автоматическое зарядное усройство “Хинта-1″
Номер патента: 1186
Опубликовано: 14.06.1996
Автор: Химин Николай Петрович
МПК: H02J 7/10, H02J 7/00, H02J 7/04...
Метки: усройство, зарядное, автоматическое, хинта-1
Текст:
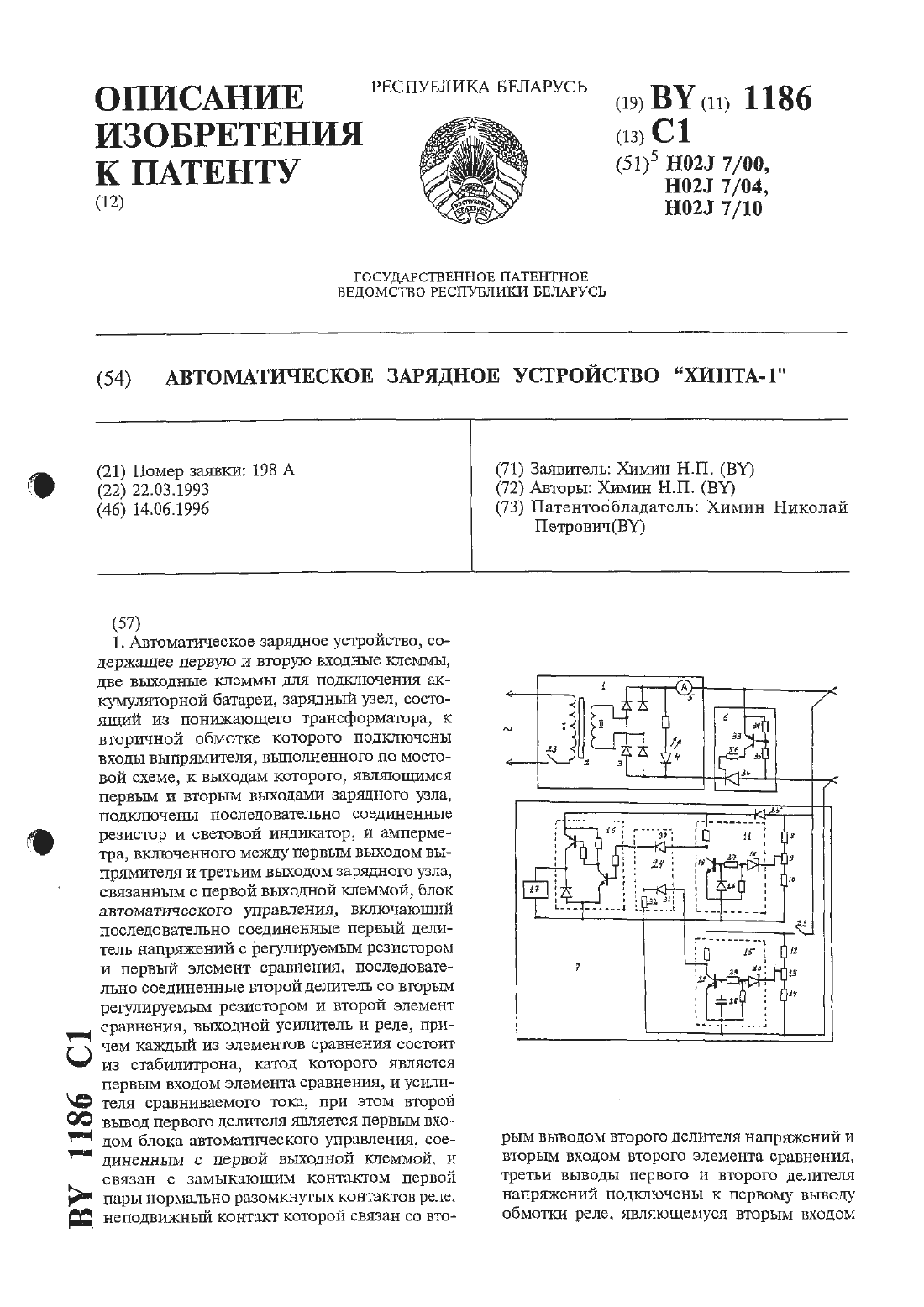
...значениевыходного напряжения начала зарядки АБ и дополнительно позволяет измерять напряжение на подключенной к устройству АБ, а также исключить кнопку Пуск. как избыточный элемент.Введение градуированной по выходному напряэкению шкалы и указателя положения оси подстроечното резистора делителя выходного напряжения узла автоматического отключения устройства от электросети упрощает его настройку, сводя ее к одноразовой установке указателя...
Устройство для вычисления фундаментальных симметрических булевых функций
Номер патента: 1433
Опубликовано: 16.12.1996
Автор: Супрун Валерий Павлович
МПК: G06F 7/00
Метки: симметрических, вычисления, фундаментальных, устройство, функций, булевых
Текст:
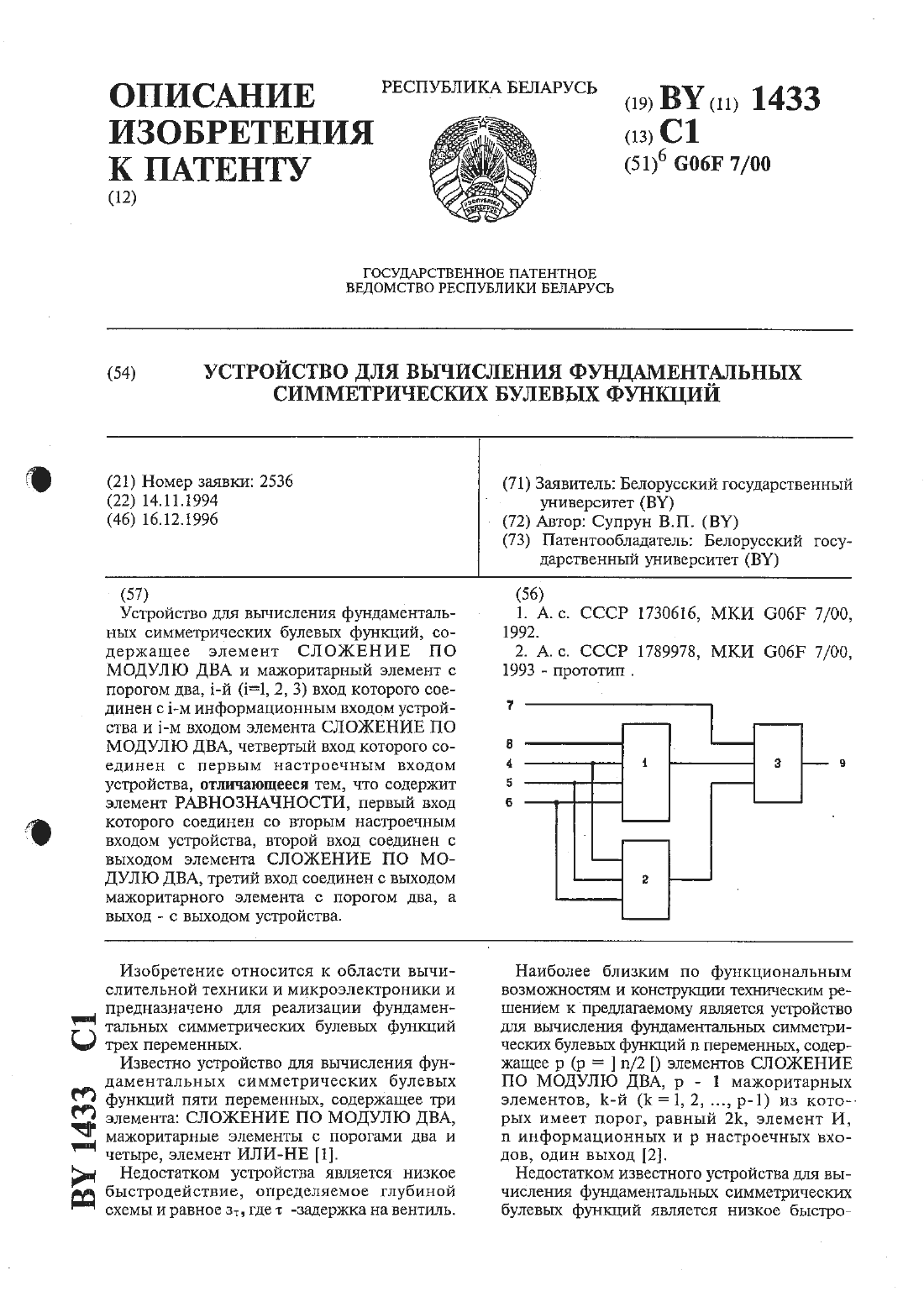
...РАВНОЗНАЧНОСТИ. Первый, второй и третий входы мажоритарного элемента с порогом два соединены соответственно с первым, вторым и третьим информационными входами устройства и с первым, вторым и третьим входами элемента СЛОЖЕНИЕ ПО МОДУЛЮ ДВА, четвертый вход которого соединен с первым настроенным входом устройства. Первый вход элемента РАВНОЗНАЧНОСТИ соединен со вторым настроенным входом устройства, второй вход соединен с выходом элемента...
Одноразрядный десятичный сумматор
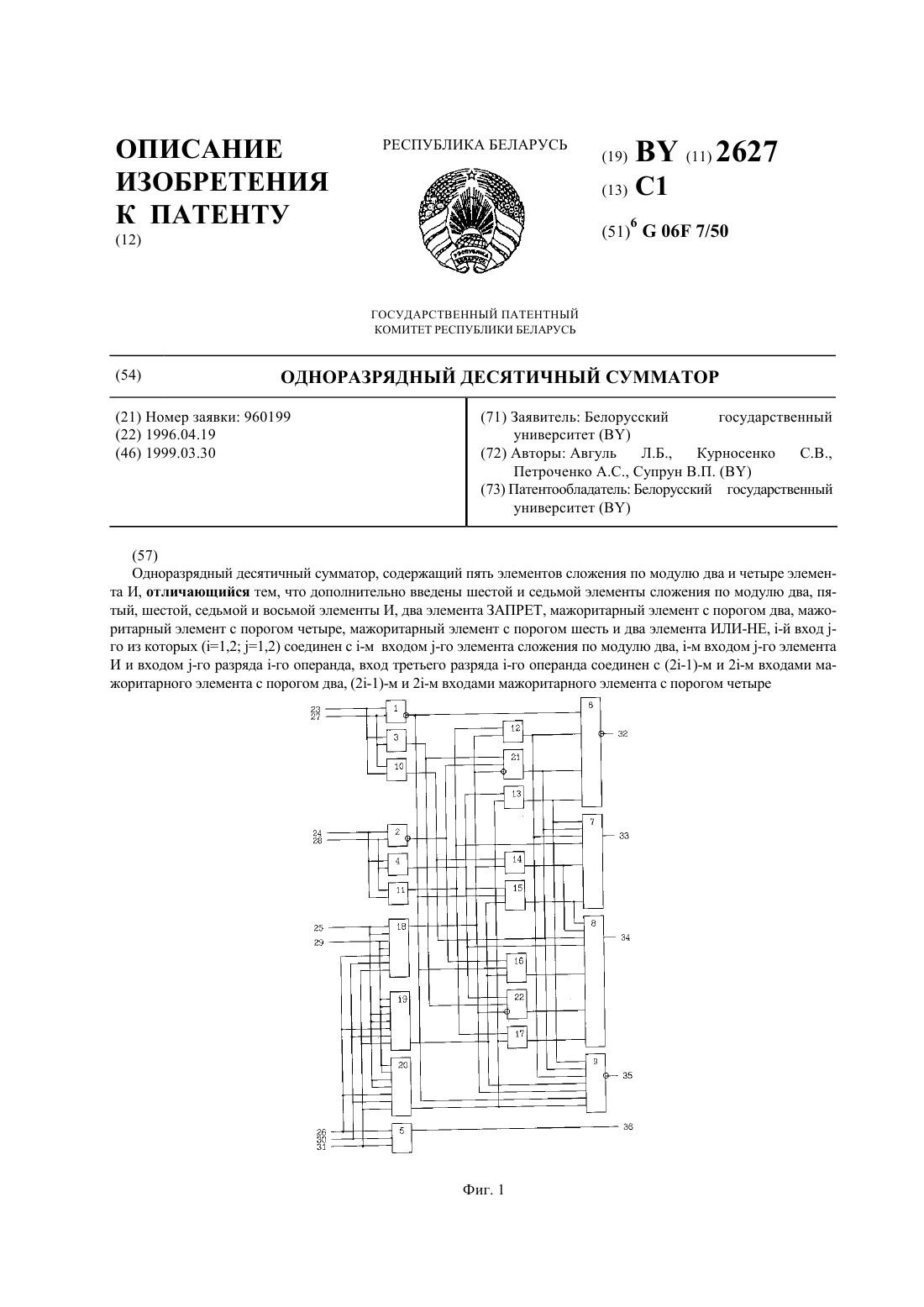
Номер патента: 2627
Опубликовано: 30.03.1999
Авторы: Авгуль Леонид Болеславович, Супрун Валерий Павлович, Петроченко Андрей Сергеевич, Курносенко Сергей Васильевич
МПК: G06F 7/50
Метки: сумматор, одноразрядный, десятичный
Текст:
...сумматор, содержащий пять элементов сложения по модулю два и четыре элемента И, согласно изобретению дополнительно введены шестой и седьмой элементы сложения по модулю два, пятый, шестой, седьмой и восьмой элементы И, два элемента ЗАПРЕТ, мажоритарный элемент с порогом два, мажоритарный элемент с порогом четыре,мажоритарный элемент с порогом шесть и два элемента ИЛИ-НЕ, -й вход -го из которых (1,2 ,2) соединен с -м входом -го элемента...
Сумматор унитарных кодов по модулю три
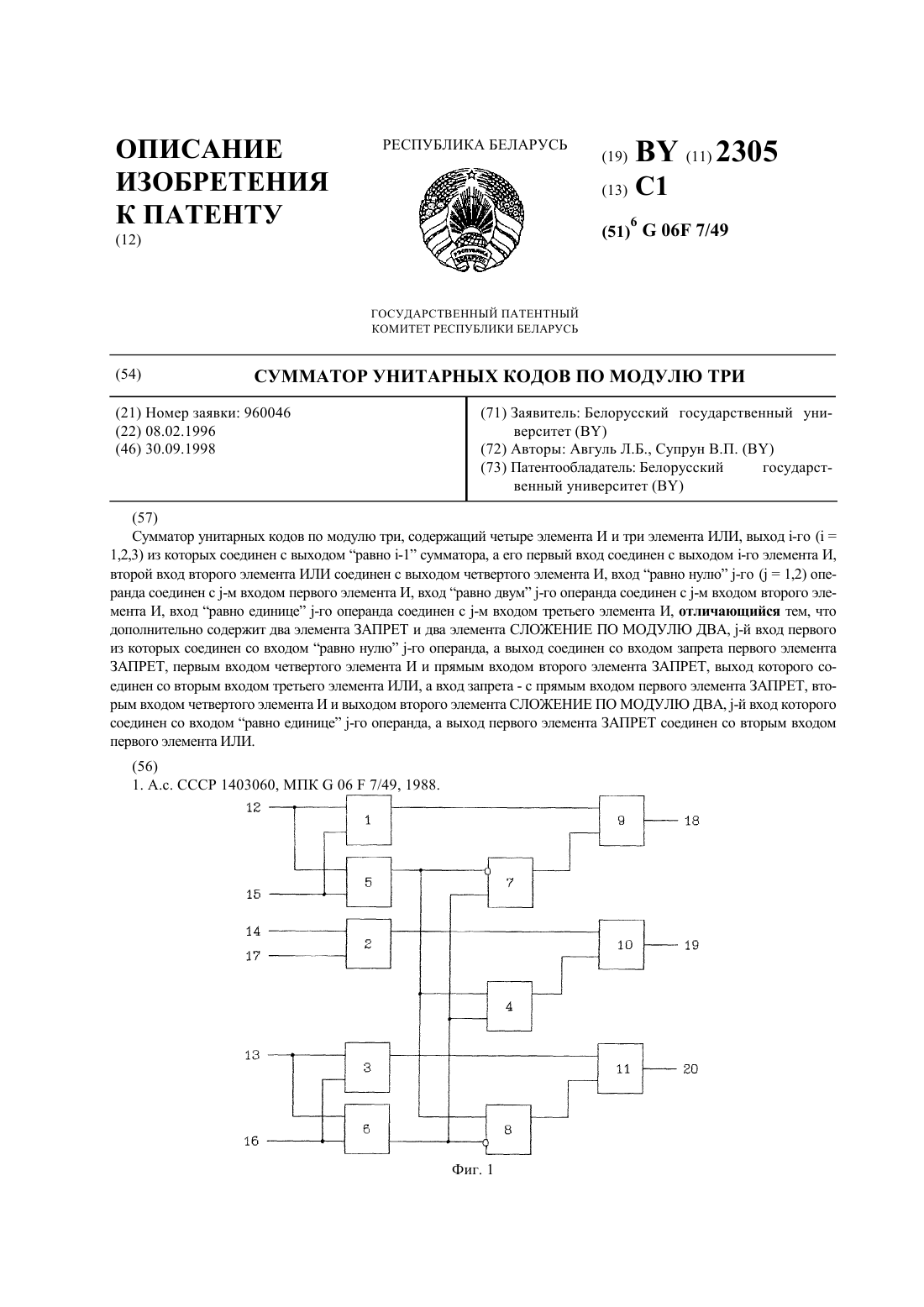
Номер патента: 2305
Опубликовано: 30.09.1998
Авторы: Авгуль Леонид Болеславович, Супрун Валерий Павлович
МПК: G06F 7/49
Метки: модулю, кодов, унитарных, сумматор, три
Текст:
...три содержит четыре элемента И и три элемента ИЛИ. Выход -г (1, 2, 3) элемента ИЛИ соединен с выходом равно -1 сумматора, а его первый вход соединен с выходом -г элемента И. Второй вход второго элемента ИЛИ соединен с выходом четвертого элемента И, вход равно нулю-го (1, 2) операнда соединен с -м входом первого элемента И. Вход равно двум -го операнда соединен с -м входом второго элемента И, вход равно единице -го операнда соединен с -м...
Предыдущий патент: Пневмотекстурирующее устройство
Следующий патент: Способ гидродинамического полирования
Случайный патент: Гидрофобизированная противогололедная добавка в асфальтобетонную смесь для устройства верхнего слоя дорожного покрытия