Мусоровоз
Номер патента: 4453
Опубликовано: 30.06.2002
Авторы: Панасюк Анатолий Иванович, Шастин Владимир Алексеевич
Текст
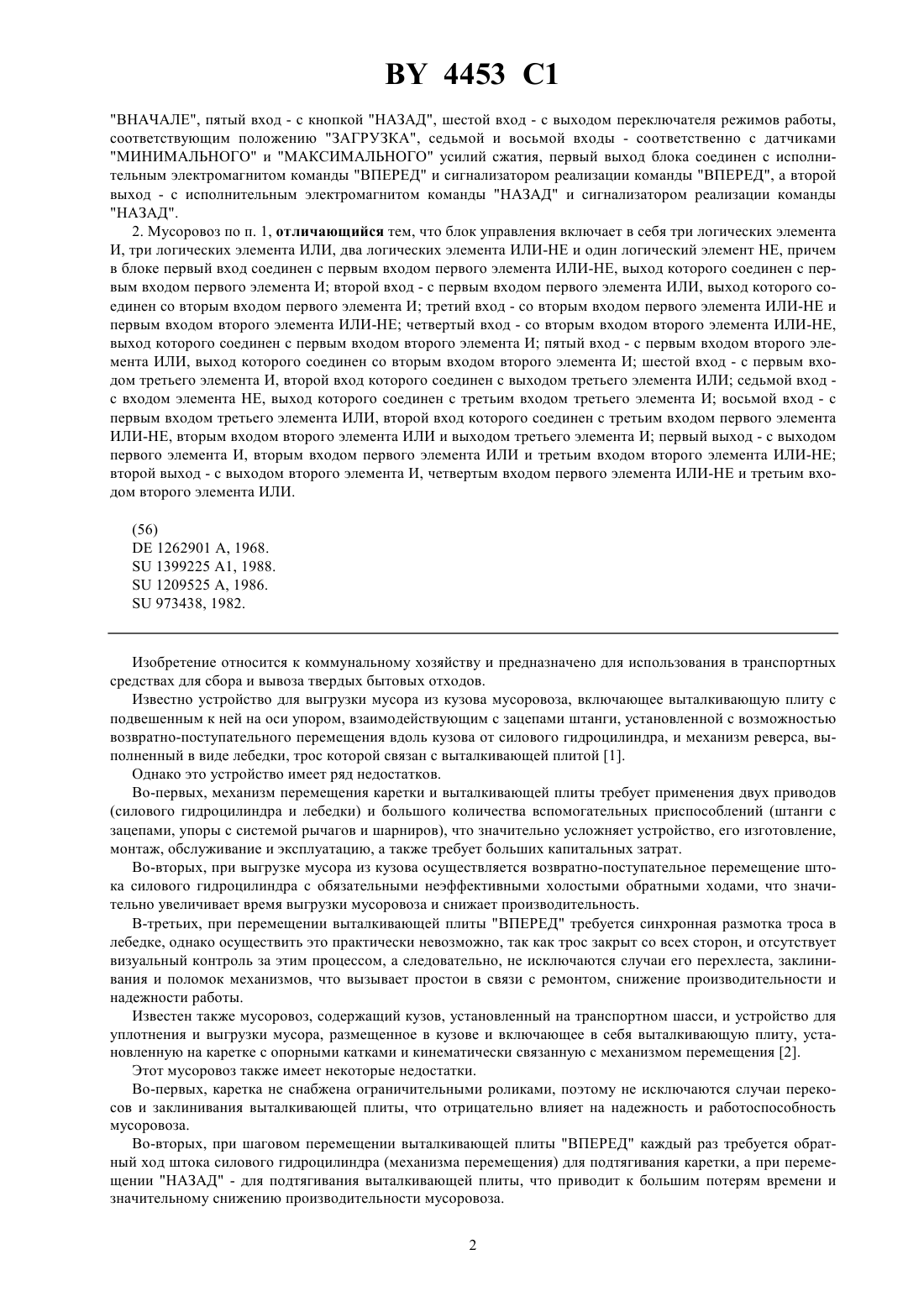
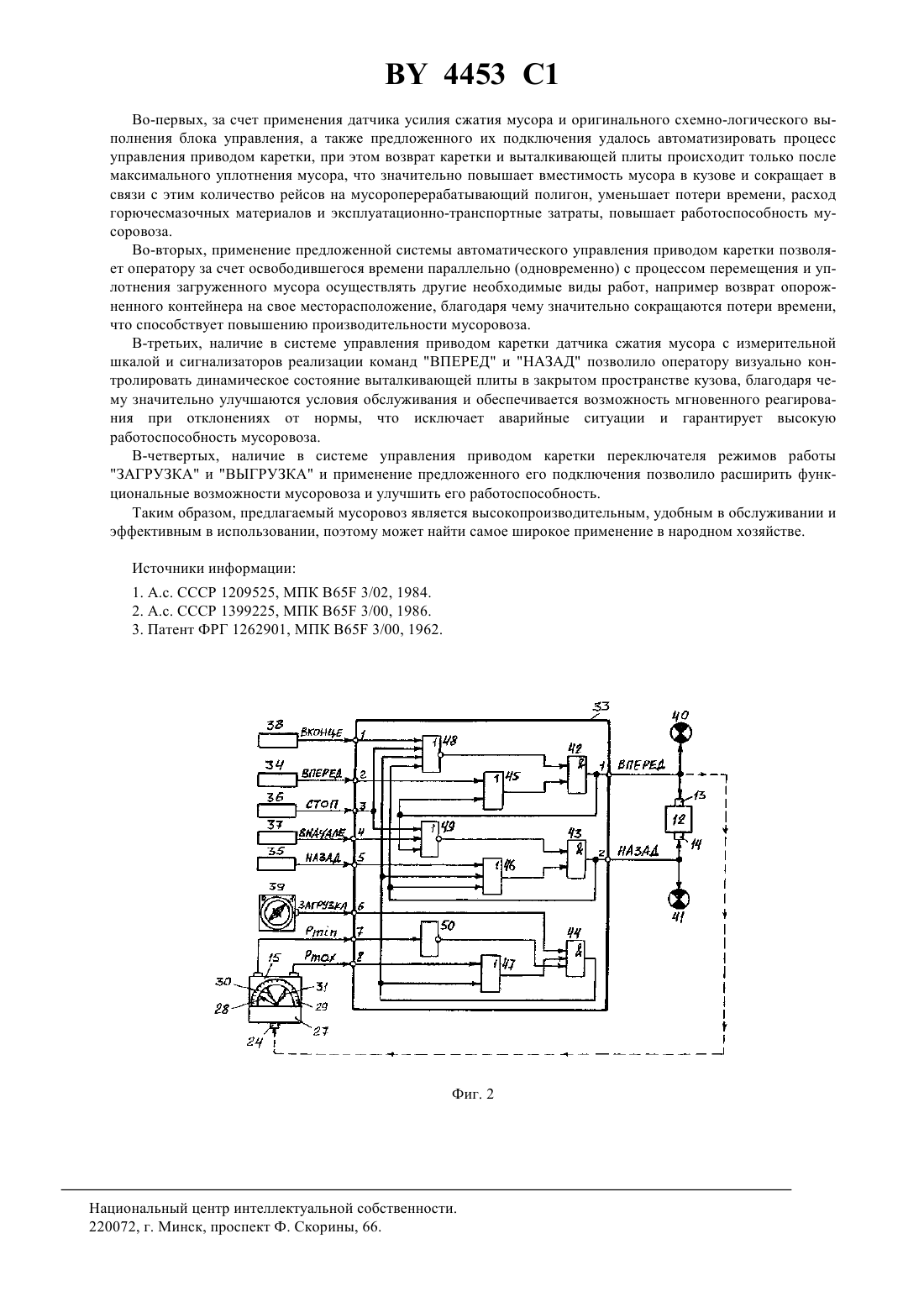
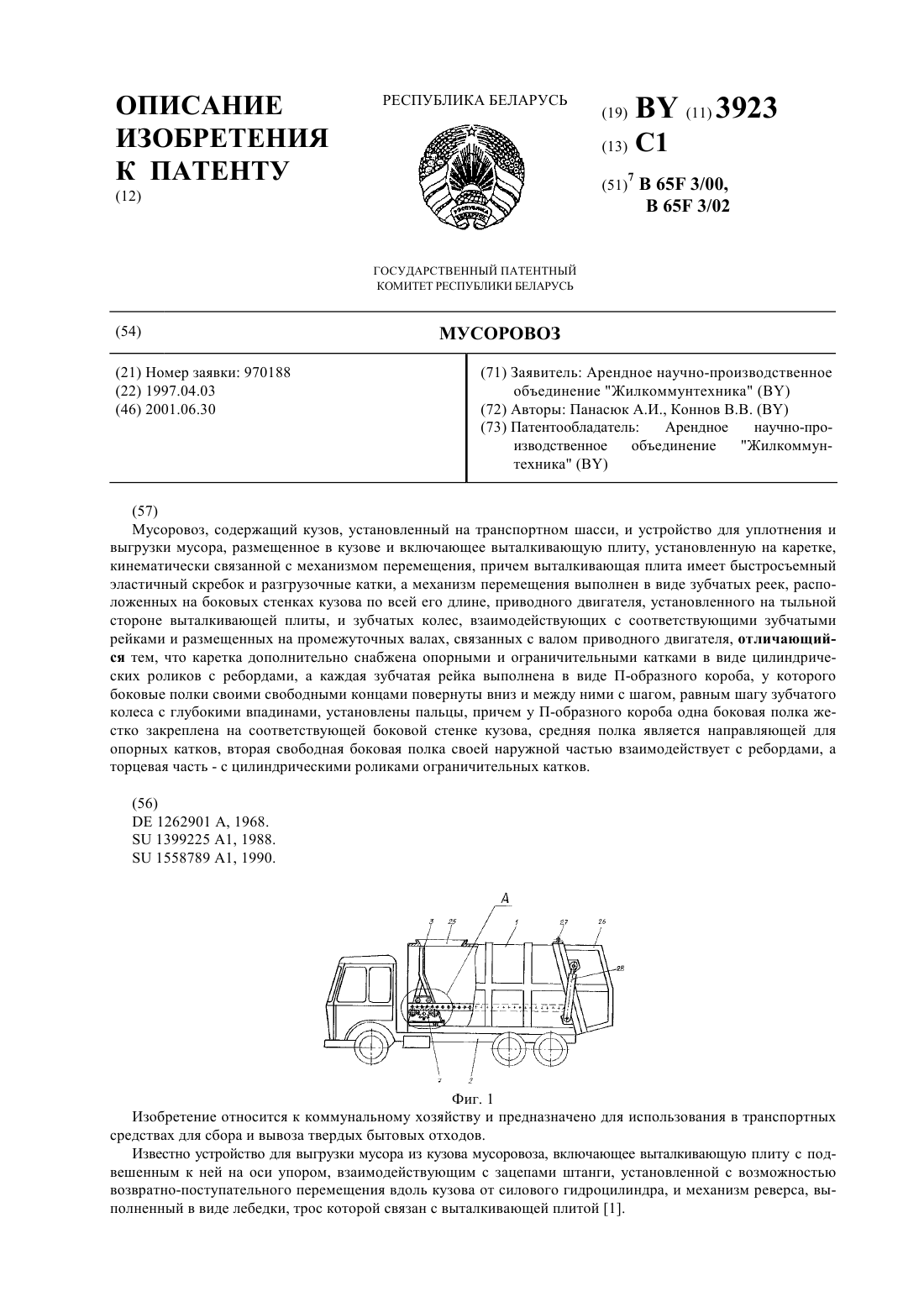
65 3/02 НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(57) 1. Мусоровоз, содержащий кузов, установленный на транспортном шасси, и устройство для уплотнения и выгрузки мусора, размещенное в кузове и включающее выталкивающую плиту, установленную на каретке с опорными катками, кинематически связанной с механизмом перемещения, который выполнен в виде зубчатых реек, расположенных на боковых стенках кузова по всей его длине приводного двигателя, установленного на тыльной стороне выталкивающей плиты, и зубчатых колес, взаимодействующих с соответствующими зубчатыми рейками и размещенных на промежуточных валах, связанных с валом приводного двигателя, отличающийся тем, что приводной двигатель выполнен в виде гидровращателя, а устройство для уплотнения и выгрузки мусора снабжено закрепленными на кузове гидрораспределителем с исполнительными электромагнитами команд ВПЕРЕД и НАЗАД, блоком управления, датчиками расположения выталкивающей плиты ВНАЧАЛЕ и ВКОНЦЕ, кнопками ВПЕРЕД, НАЗАД и СТОП, переключателем режимов работы ЗАГРУЗКА и ВЫГРУЗКА, сигнализаторами реализации команд ВПЕРЕД и НАЗАД, а также датчиком усилия сжатия мусора, включающим в себя чувствительный элемент, указатель-стрелку реального усилия сжатия материала, задатчик МИНИМАЛЬНОГО и задатчик МАКСИМАЛЬНОГО усилий сжатия мусора, причем гидрораспределитель с одной стороны через подводящий и отводящий Фиг. 1 гибкие шланги гидравлически связан с питающими магистралями и с другой стороны через гибкие шланги и тройник гидравлически соединен с гидравлическим входом чувствительного элемента датчика усилия сжатия материала, напорным и сливным отверстиями гидровращателя, а в блоке управления первый вход соединен с датчиком расположения выталкивающей плиты ВКОНЦЕ, второй вход - с кнопкой ВПЕРЕД, третий вход - с кнопкой СТОП, четвертый вход - с датчиком расположения выталкивающей плиты 4453 1 ВНАЧАЛЕ, пятый вход - с кнопкой НАЗАД, шестой вход - с выходом переключателя режимов работы,соответствующим положению ЗАГРУЗКА, седьмой и восьмой входы - соответственно с датчиками МИНИМАЛЬНОГО и МАКСИМАЛЬНОГО усилий сжатия, первый выход блока соединен с исполнительным электромагнитом команды ВПЕРЕД и сигнализатором реализации команды ВПЕРЕД, а второй выход - с исполнительным электромагнитом команды НАЗАД и сигнализатором реализации команды НАЗАД. 2. Мусоровоз по п. 1, отличающийся тем, что блок управления включает в себя три логических элемента И, три логических элемента ИЛИ, два логических элемента ИЛИ-НЕ и один логический элемент НЕ, причем в блоке первый вход соединен с первым входом первого элемента ИЛИ-НЕ, выход которого соединен с первым входом первого элемента И второй вход - с первым входом первого элемента ИЛИ, выход которого соединен со вторым входом первого элемента И третий вход - со вторым входом первого элемента ИЛИ-НЕ и первым входом второго элемента ИЛИ-НЕ четвертый вход - со вторым входом второго элемента ИЛИ-НЕ,выход которого соединен с первым входом второго элемента И пятый вход - с первым входом второго элемента ИЛИ, выход которого соединен со вторым входом второго элемента И шестой вход - с первым входом третьего элемента И, второй вход которого соединен с выходом третьего элемента ИЛИ седьмой вход с входом элемента НЕ, выход которого соединен с третьим входом третьего элемента И восьмой вход - с первым входом третьего элемента ИЛИ, второй вход которого соединен с третьим входом первого элемента ИЛИ-НЕ, вторым входом второго элемента ИЛИ и выходом третьего элемента И первый выход - с выходом первого элемента И, вторым входом первого элемента ИЛИ и третьим входом второго элемента ИЛИ-НЕ второй выход - с выходом второго элемента И, четвертым входом первого элемента ИЛИ-НЕ и третьим входом второго элемента ИЛИ. Изобретение относится к коммунальному хозяйству и предназначено для использования в транспортных средствах для сбора и вывоза твердых бытовых отходов. Известно устройство для выгрузки мусора из кузова мусоровоза, включающее выталкивающую плиту с подвешенным к ней на оси упором, взаимодействующим с зацепами штанги, установленной с возможностью возвратно-поступательного перемещения вдоль кузова от силового гидроцилиндра, и механизм реверса, выполненный в виде лебедки, трос которой связан с выталкивающей плитой 1. Однако это устройство имеет ряд недостатков. Во-первых, механизм перемещения каретки и выталкивающей плиты требует применения двух приводов(силового гидроцилиндра и лебедки) и большого количества вспомогательных приспособлений (штанги с зацепами, упоры с системой рычагов и шарниров), что значительно усложняет устройство, его изготовление,монтаж, обслуживание и эксплуатацию, а также требует больших капитальных затрат. Во-вторых, при выгрузке мусора из кузова осуществляется возвратно-поступательное перемещение штока силового гидроцилиндра с обязательными неэффективными холостыми обратными ходами, что значительно увеличивает время выгрузки мусоровоза и снижает производительность. В-третьих, при перемещении выталкивающей плиты ВПЕРЕД требуется синхронная размотка троса в лебедке, однако осуществить это практически невозможно, так как трос закрыт со всех сторон, и отсутствует визуальный контроль за этим процессом, а следовательно, не исключаются случаи его перехлеста, заклинивания и поломок механизмов, что вызывает простои в связи с ремонтом, снижение производительности и надежности работы. Известен также мусоровоз, содержащий кузов, установленный на транспортном шасси, и устройство для уплотнения и выгрузки мусора, размещенное в кузове и включающее в себя выталкивающую плиту, установленную на каретке с опорными катками и кинематически связанную с механизмом перемещения 2. Этот мусоровоз также имеет некоторые недостатки. Во-первых, каретка не снабжена ограничительными роликами, поэтому не исключаются случаи перекосов и заклинивания выталкивающей плиты, что отрицательно влияет на надежность и работоспособность мусоровоза. Во-вторых, при шаговом перемещении выталкивающей плиты ВПЕРЕД каждый раз требуется обратный ход штока силового гидроцилиндра (механизма перемещения) для подтягивания каретки, а при перемещении НАЗАД - для подтягивания выталкивающей плиты, что приводит к большим потерям времени и значительному снижению производительности мусоровоза. 2 4453 1 В-третьих, механизм шагового перемещения требует обязательного дополнительного применения устройства позиционной фиксации каретки, привода фиксатора и системы дистанционного управления приводом фиксатора, что конструктивно значительно усложняет мусоровоз и увеличивает капитальные затраты. Кроме того, потребность в поочередной расфиксации и фиксации каретки в процессе ее шагового перемещения требует повышенного сосредоточения внимания и значительных потерь времени, что отрицательно влияет на производительность мусоровоза. В-четвертых, механизм шагового перемещения требует также обязательного дополнительного применения тормозного устройства для выталкивающей плиты при подтягивании к ней каретки, что также конструктивно усложняет мусоровоз и увеличивает капитальные затраты. Кроме того, при перемещении выталкивающей плиты НАЗАД в исходное положение привод каретки должен преодолевать большие усилия упругих элементов тормозного устройства, что приводит к значительному увеличению энергопотребления мусоровоза и эксплуатационных затрат. В-пятых, отсутствуют средства визуального контроля динамического состояния выталкивающей плиты в закрытом пространстве кузова, поэтому оператор вынужден управлять приводом интуитивно вручную. При таком управлении, во-первых, возможно чрезмерно длительное сжатие материала (мусора) в кузове за счет запаздывающего возврата выталкивающей плиты в исходное начальное положение, в результате чего происходят значительные потери времени и снижение производительности во-вторых, возможно недостаточное уплотнение материала за счет преждевременного возврата выталкивающей плиты в исходное начальное положение, в результате чего значительно уменьшается вместимость кузова, увеличивается количество автотранспортных рейсов на мусороперерабатывающий полигон, а также в связи с этим увеличивается расход горюче-смазочных материалов и эксплуатационных затрат. Наиболее близким по технической сущности и достигаемому результату к изобретению является мусоровоз, содержащий кузов, установленный на транспортном шасси, и устройство для уплотнения и выгрузки мусора, размещенное в кузове и включающее выталкивающую плиту, установленную на каретке с опорными катками, кинематически связанной с механизмом перемещения, который выполнен в виде зубчатых реек,расположенных на боковых стенках кузова по всей его длине, приводного двигателя, установленного на тыльной стороне выталкивающей плиты, и зубчатых колес, взаимодействующих с соответствующими зубчатыми рейками и размещенных на промежуточных валах, связанных с валом приводного двигателя 3. Однако этот мусоровоз также имеет недостатки. Во-первых, в нем отсутствуют средства своевременного автоматического отключения приводного двигателя механизма перемещения выталкивающей плиты и возможны случаи ее столкновения с ограничительными упорами в крайних (переднем и заднем) положениях, в результате возможны поломки и большие потери времени на ремонтно-восстановительные работы, что снижает производительность и надежность работы мусоровоза. Причем при вышеуказанных столкновениях происходят сильные перегрузки приводного двигателя, в результате чего возможны случаи выхода и его из строя, а также связанные с этим большие потери времени на ремонтно-восстановительные работы, что дополнительно снижает производительность и надежность работы мусоровоза. Во-вторых, отсутствуют средства визуального контроля динамического состояния выталкивающей плиты в закрытом пространстве кузова мусоровоза, поэтому оператор вынужден управлять приводным двигателем интуитивно вручную. При таком управлении, с одной стороны, возможно чрезмерное сжатие мусора в кузове за счет запаздывающего отключения приводного двигателя и возврата выталкивающей плиты в исходное начальное положение, в результате чего происходят значительные потери времени и снижение производительности а с другой стороны, возможно недостаточное уплотнение мусора за счет преждевременного выключения приводного двигателя и возврат выталкивающей плиты в исходное начальное положение, в результате чего значительно уменьшается вместимость кузова, увеличивается количество автотранспортных рейсов на мусороперерабатывающий полигон и в связи с этим увеличивается расход горючесмазочных материалов, а также увеличиваются эксплуатационные затраты. Задачей изобретения является обеспечение высокой степени уплотнения мусора и увеличение вместимости кузова, уменьшение потерь времени при загрузочно-разгрузочных операциях, снижение расхода горючесмазочных материалов и эксплуатационно-транспортных затрат, повышение работоспособности и производительности мусоровоза. Эта задача решается тем, что в мусоровозе, содержащем кузов, установленный на транспортном шасси, и устройство для уплотнения и выгрузки мусора, размещенное в кузове и включающее выталкивающую плиту,установленную на каретке с опорными и ограничительными катками, кинематически связанной с механизмом перемещения, который выполнен в виде зубчатых реек, расположенных на боковых стенках кузова по всей его длине, приводного двигателя, установленного на тыльной стороне выталкивающей плиты, и зубчатых колес, взаимодействующих с соответствующими зубчатыми рейками и размещенных на промежуточных валах, связанных с валом приводного двигателя, в соответствии с изобретением приводной двигатель вы 3 4453 1 полнен в виде гидровращателя, а устройство для уплотнения и выгрузки мусора снабжено закрепленными на кузове гидрораспределителем с исполнительными электромагнитами команд ВПЕРЕД и НАЗАД, блоком управления, датчиками расположения выталкивающей плиты ВНАЧАЛЕ и ВКОНЦЕ, кнопками ВПЕРЕД,НАЗАД и СТОП, переключателем режимов работы ЗАГРУЗКА и ВЫГРУЗКА, сигнализаторами реализации команд ВПЕРЕД и НАЗАД, а также датчиком усилия сжатия мусора, включающим в себя чувствительный элемент, указатель-стрелку реального усилия сжатия материала, задатчик МИНИМАЛЬНОГО и задатчик МАКСИМАЛЬНОГО усилий сжатия мусора, причем гидрораспределитель с одной стороны через подводящий и отводящий гибкие шланги гидравлически связан с питающими магистралями и с другой стороны через гибкие шланги и тройник гидравлически соединен с гидравлическим входом чувствительного элемента датчика усилия сжатия материала, напорным и сливным отверстиями гидровращателя, а в блоке управления первый вход соединен с датчиком расположения выталкивающей плиты ВКОНЦЕ, второй вход - с кнопкой ВПЕРЕД, третий вход - с кнопкой СТОП, четвертый вход - с датчиком расположения выталкивающей плиты ВНАЧАЛЕ, пятый вход - с кнопкой НАЗАД, шестой вход - с выходом переключателя режимов работы, соответствующим положению ЗАГРУЗКА, седьмой и восьмой входы - соответственно с датчиками МИНИМАЛЬНОГО и МАКСИМАЛЬНОГО усилий сжатия, первый выход блока соединен с исполнительным электромагнитом команды ВПЕРЕД и сигнализатором реализации команды ВПЕРЕД, а второй выход - с исполнительным электромагнитом команды НАЗАД и сигнализатором реализации команды НАЗАД. Блок управления включает в себя три логических элемента И, три логических элемента ИЛИ, два логических элемента ИЛИ-НЕ и один логический элемент НЕ, причем в блоке первый вход соединен с первым входом первого элемента ИЛИ-НЕ, выход которого соединен с первым входом первого элемента И второй вход- с первым входом первого элемента ИЛИ, выход которого соединен со вторым входом первого элемента И третий вход - со вторым входом первого элемента ИЛИ-НЕ и первым входом второго элемента ИЛИ-НЕ четвертый вход - со вторым входом второго элемента ИЛИ-НЕ, выход которого соединен с первым входом второго элемента И пятый вход - с первым входом второго элемента ИЛИ, выход которого соединен со вторым входом второго элемента И шестой вход - с первым входом третьего элемента И, второй вход которого соединен с выходом третьего элемента ИЛИ седьмой вход - с входом элемента НЕ, выход которого соединен с третьим входом третьего элемента И восьмой вход - с первым входом третьего элемента ИЛИ, второй вход которого соединен с третьим входом первого элемента ИЛИ-НЕ, вторым входом второго элемента ИЛИ и выходом третьего элемента И первый выход - с выходом первого элемента И, вторым входом первого элемента ИЛИ и третьим входом второго элемента ИЛИ-НЕ второй выход - с выходом второго элемента И, четвертым входом первого элемента ИЛИ-НЕ и третьим входом второго элемента ИЛИ. На фиг. 1 изображен предлагаемый мусоровоз, вид сбоку на фиг. 2 - функционально-логическая схема системы управления приводом перемещения каретки и выталкивающей плиты. Предлагаемый мусоровоз содержит кузов 1, установленный на транспортном шасси 2, и устройство 3 для уплотнения и выгрузки мусора, размещенное в кузове 1 и включающее выталкивающую плиту 4, установленную на каретке 5 с опорными катками 6, кинематически связанной с механизмом перемещения, который выполнен в виде зубчатых реек 7, расположенных на боковых стенках кузова 1 по всей его длине, приводного двигателя 8, установленного на тыльной стороне выталкивающей плиты 4, и зубчатых колес 9, взаимодействующих с соответствующими зубчатыми рейками 7 и размещенных на промежуточных валах 10, связанных с валом 11 приводного двигателя 8, выполненного в виде гидровращателя. Устройство 3 также снабжено гидрораспределителем 12 с исполнительными электромагнитами команд 13 ВПЕРЕД и 14 НАЗАД, датчиком 15 сжатия мусора в кузове и пультом 16 системы управления приводом перемещения каретки и выталкивающей плиты. Гидрораспределитель 12 стационарно расположен в кузове 1 и гидравлически соединен через гибкие подводящий 17 и отводящий 18 шланги питающих магистралей, например гидросистемы транспортного средства, а через гибкие шланги 19, 20, 21 и тройник 22 - с напорным отверстием 23 гидровращателя 8 и гидравлическим входом 24 датчика 15, а также через гибкий шланг 25 - со сливным отверстием 26 гидровращателя 8. Датчик 15 включает в себя чувствительный элемент 27 с гидравлическим входом 24, указатель-стрелку 28 реального усилия сжатия мусора, кинематически связанную с чувствительным элементом 27, измерительную шкалу 29 усилия сжатия, задатчик 30 МИНИМАЛЬНОГО и задатчик 31 МАКСИМАЛЬНОГО усилий сжатия мусора в кузове 1. Датчик 15 стационарно расположен на боковой стенке кузова 1 с возможностью удобного обслуживания и хорошего визуального обозрения измерительной шкалы 29. Пульт 16 располагается в кабине 32 транспортного средства и с учетом удобства обслуживания выполнен переносным. На пульте 16 расположены все необходимые пусковые сигнальные, защитные и логические элементы системы управления приводом перемещения каретки и выталкивающей плиты. 4 4453 1 Функционально-логическая схема системы управления приводом перемещения каретки и выталкивающей плиты включает в себя исполнительные электромагниты команд 13 ВПЕРЕД и 14 НАЗАД гидрораспределителя 12, датчик 15 сжатия мусора, блок 33 управления, кнопку 34 ВПЕРЕД, кнопку 35 НАЗАД, кнопку 36 СТОП, датчики расположения выталкивающей плиты 37 и 38 ВКОНЦЕ, переключатель 39 режимов работы ЗАГРУЗКА и ВЫГРУЗКА, сигнализаторы 40 и 41 реализации команд гидрораспределителя ВПЕРЕД и НАЗАД, причем в блоке 33 первый вход соединен с датчиком 38 расположения выталкивающей плиты ВКОНЦЕ, второй вход - с кнопкой 34 ВПЕРЕД, третий вход - с кнопкой 36 СТОП, четвертый вход - с датчиком 37 расположения выталкивающей плиты, пятый вход - с кнопкой 35 НАЗАД, шестой вход - с выходом переключателя 39 режимов работы, соответствующим положению ЗАГРУЗКА, седьмой и восьмой входы - соответственно с задатчиками 30 МИНИМАЛЬНОГО и 31 МАКСИМАЛЬНОГО усилий сжатия датчика 15, а первый выход - с исполнительным электромагнитом 13 и сигнализатором 40 реализации команды ВПЕРЕД, второй выход - с исполнительным электромагнитом 14 и сигнализатором 41 реализации команды НАЗАД. Блок 33 управления включает в себя логические элементы 42, 43, 44 И, логические элементы 45, 46, 47 ИЛИ, логические элементы 48, 49 ИЛИ-НЕ и логический элемент 50 НЕ, причем в блоке 33 первый вход соединен с первым входом элемента 48 ИЛИ-НЕ, выход которого соединен с первым входом элемента 42 И второй вход - с первым входом элемента 45 ИЛИ, выход которого соединен со вторым входом элемента 42 И третий вход - со вторым входом элемента 48 ИЛИ-НЕ и первым входом элемента 49 ИЛИ-НЕ четвертый вход - со вторым входом элемента 49 ИЛИ-НЕ, выход которого соединен с первым входом элемента 43 И пятый вход - с первым входом элемента 45 ИЛИ, выход которого соединен со вторым входом элемента 43 И шестой вход - с первым входом элемента 44 И, второй вход которого соединен с выходом элемента 46 ИЛИ седьмой вход - с входом элемента 50 НЕ, выход которого соединен с третьим входом элемента 44 И восьмой вход - с первым входом элемента 46 ИЛИ, второй вход которого соединен с третьим входом элемента 48 ИЛИ-НЕ, вторым входом элемента 45 ИЛИ и выходом элемента 44 И первый выход - с выходом элемента 42 И, вторым входом элемента 44 ИЛИ и третьим входом элемента 49 ИЛИ-НЕ второй выход - с выходом элемента 43 И, четвертым входом элемента 48 ИЛИ-НЕ и третьим входом элемента 46 ИЛИ. Мусоровоз работает следующим образом. Прежде чем приступить к заполнению кузова 1, оператор обязан установить рукоятку переключателя 39 режимов работы в положение 1 - (ЗАГРУЗКА), в результате чего появляется сигнал на его выходе, шестом входе блока 33 и первом входе элемента 44 И (подготовка к фиксации максимального усилия сжатия материала и участию в автоматическом управлении). Затем оператор организует загрузку кузова 1 через окно 51 мусором, поступающим, например, из контейнера (на чертежах не показан), при этом каретка 5 должна находиться в исходном начальном положении, а выталкивающая плита 4 взаимодействовать с датчиком 37, в результате чего появляется сигнал на его выходе, четвертом входе блока 33 и втором входе элемента 49 ИЛИ-НЕ. После этого оператор, убедившись в готовности мусоровоза к эксплуатации, воздействует на кнопку 34 ВПЕРЕД, в результате чего на ее выходе появляется сигнал, который поступает на второй вход блока 33 и первый вход элемента 45 ИЛИ. Наличие сигнала на одном из входов элемента 45 ИЛИ вызывает появление сигнала на его выходе, втором входе и выходе элемента 42 И, входе исполнительного электромагнита 13 и входе сигнализатора 40 реализации команды ВПЕРЕД, а также втором входе элемента 45 ИЛИ (запоминается) и третьем входе элемента 49 ИЛИ-НЕ (запрет противовключения). Сигнализатор 40 извещает о включении исполнительного электромагнита 13 команды ВПЕРЕД гидрораспределителя 12, а также соединении напорного отверстия 23 гидровращателя 8 и гидравлического входа 24 датчика 15 через тройник 22 и гибкие шланги 19, 20, 21 с подводящим гибким шлангом 17 питающей магистрали, а сливное отверстие 26 гидровращателя 8 через гибкий шланг 25 соединяется с отводящим шлангом 18 питающей магистрали, в результате чего в них осуществляется гидроциркуляция, а приводной вал 11,промежуточные валы 10 и зубчатые колеса 9 начинают вращаться против часовой стрелки, при этом зубчатые колеса 9 вступают во взаимодействие с зубчатыми рейками 7 и начинают перемещать ВПЕРЕД каретку 5 и выталкивающую плиту 4, которая вступает в плотное соприкосновение с загруженным мусором и по ходу движения перемещает его в конец кузова 1. Оператор после поступления информации о реализации команды ВПЕРЕД сразу же отпускает кнопку 34, так как дальше процесс управления осуществляется автоматически, и за счет освободившегося времени одновременно (параллельно) продолжает выполнять другие необходимые виды работ, например возврат опорожненного контейнера на свое месторасположение, благодаря чему значительно сокращаются потери времени, что способствует повышению работоспособности и производительности мусоровоза. Наличие верхних и нижних опорных катков 6 исключает при передвижении перекосы каретки 5 и выталкивающей плиты 4, что гарантирует надежность работы и равномерность перемещения мусора в кузове 1. Оператор, руководствуясь визуальной информацией датчика 15 и сигнализаторов 40, 41, постоянно контро 5 4453 1 лирует динамическое состояние выталкивающей плиты 4 в закрытом пространстве кузова 1 и имеет возможность при необходимости принудительно приостанавливать передвижение каретки путем воздействия на кнопку 36 СТОП, в результате чего появляется сигнал на ее выходе, третьем входе блока 33, втором входе элемента 48 ИЛИ-НЕ и первом входе элемента 49 ИЛИ-НЕ, после чего исчезают сигналы на их выходах,первых входах элементов 42, 43 И, выходе элемента 42 И, втором входе элемента 45 ИЛИ, третьем входе элемента 49 ИЛИ-НЕ, первом выходе блока 33, входах исполнительного электромагнита 13 и сигнализатора 40 реализации команды ВПЕРЕД, которые отключаются, и прекращается гидроциркуляция во всех гибких шлангах, гидрораспределителе. Для возобновления движения ВПЕРЕД каретки 5 и выталкивающей плиты 4 оператор обязан повторно кратковременно, аналогично вышеизложенному, нажать на кнопку 34 ВПЕРЕД. Таким образом, оператор имеет возможность корректировать процесс управления и заблаговременно исключать аварийные ситуации, что гарантирует надежность и высокую работоспособность мусоровоза. При прибытии каретки 5 в крайнее положение выталкивающая плита 4 начинает прижимать и уплотнять загруженный мусор к задней части кузова 1, в результате чего происходит увеличение гидравлического давления в гибких шлангах 17, 19, 20, 21, напорном отверстии 23 гидровращателя 8 и гидравлическом входе 24 чувствительного элемента 27 датчика 15. При увеличении давления чувствительный элемент 27 дает команду на поворот указателя-стрелки 28, которая по ходу движения сначала вступает во взаимодействие с задатчиком 30 МИНИМАЛЬНОГО значения усилия сжатия, в результате чего исчезает сигнал на его выходе, седьмом входе блока 33 и входе элемента 50 НЕ. Отсутствие сигнала на входе элемента 50 НЕ вызывает наличие сигнала на его выходе и третьем входе элемента 44 И, в результате чего он подготавливается к регистрации максимального усилия сжатия мусора в кузове 1. При достижении заданного максимального усилия сжатия мусора в кузове 1, достаточного для обеспечения необходимой степени его уплотнения, указатель-стрелка 28 вступает во взаимодействие с задатчиком 31,в результате чего появляется сигнал на его выходе, восьмом входе блока 33, первом входе и выходе элемента 47 ИЛИ, втором входе и выходе элемента 44 И, втором входе элемента 47 ИЛИ (запоминается), третьем входе элемента 48 ИЛИ-НЕ и втором входе элемента 46 ИЛИ. Наличие сигнала на одном из входов элемента 48 ИЛИ-НЕ вызывает исчезновение сигнала на его выходе,выходе элемента 42 И, втором входе элемента 44 ИЛИ, третьем входе элемента 49 ИЛИ-НЕ, первом выходе блока 33, входе исполнительного электромагнита 13 и входе сигнализатора 40 реализации команды ВПЕРЕД, в результате чего они отключаются, прекращается гидроциркуляция в гибких шлангах 17, 18, 19,20, 21, 25 и вращение приводного вала 11 гидровращателя 8, приостанавливается перемещение ВПЕРЕД каретки 5 и выталкивающей плиты 4, прекращается уплотнение загруженного мусора. Наличие сигнала на одном из входов элемента 46 ИЛИ вызывает появление сигнала на его выходе, втором входе и выходе элемента 43 И, третьем входе элемента 46 ИЛИ (запоминается), четвертом входе элемента 48 ИЛИ-НЕ (запрет противовключения), втором выходе блока 33, входе исполнительного электромагнита 14 и входе сигнализатора 41 реализации команды НАЗАД. Сигнализатор 41 информирует о включении исполнительного электромагнита 14, в результате чего сливное отверстие 26 гидровращателя 8 через гибкий шланг 25 соединяется с подводящим гибким шлангом 17 питающей магистрали, а напорное отверстие 23 через тройник 22, гибкие шланги 19, 21 соединяется с отводящим гибким шлангом 18 питающей магистрали, после чего в них начинается гидроциркуляция, а приводной вал 9 гидровращателя 8 и зубчатые колеса 10 начинают вращаться по часовой стрелке, при этом зубчатые колеса 10 вступают во взаимодействие с зубчатыми рейками 7 и начинают перемещать назад каретку 5 и выталкивающую плиту 4. Так как при автоматическом возврате каретки 5 и выталкивающей плиты 4 в исходное начальное положение на холостом ходу нагрузка резко уменьшается и в гибких шлангах 17, 18, 19, 20, 21, 25 создается незначительное давление, то чувствительный элемент 27 датчика 15 дает команду на возврат указатель-стрелки 28 в исходное положение, которая по ходу движения сначала прекращает взаимодействие с задатчиком 31 МАКСИМАЛЬНОГО усилия сжатия, после чего исчезает сигнал на его выходе, восьмом входе блока 33 и первом входе элемента 44 ИЛИ. Затем указатель-стрелка 28 прекращает взаимосвязь с задатчиком 30 МИНИМАЛЬНОГО усилия сжатия, после чего появляется сигнал на его выходе, седьмом входе блока 33 и входе элемента 50 НЕ. Наличие сигнала на входе элемента 50 НЕ вызывает исчезновение сигнала на его выходе, третьем входе и выходе элемента 44 И, вторых входах элементов 46, 47 ИЛИ и третьем входе элемента 48 ИЛИ-НЕ (подготовка логической цепи к реализации повторной команды ВПЕРЕД). При необходимости оператор имеет возможность, не дожидаясь начала сжатия мусора после останова перемещения каретки ВПЕРЕД, осуществлять ее возврат НАЗАД путем кратковременного воздействия на кнопку 35, в результате чего появляется сигнал на ее выходе, пятом входе блока 33, первом входе и выхо 6 4453 1 де элемента 46 ИЛИ, втором входе и выходе элемента 43 И, третьем входе элемента 46 ИЛИ (запоминается),четвертом входе элемента 48 ИЛИ-НЕ (запрет противовключения), втором выходе блока 33, входах исполнительного электромагнита 14 и сигнализатора 41, информирующего, аналогично вышеизложенному, включение привода каретки и реализации команды НАЗАД. При прибытии каретки 5 в исходное начальное положение выталкивающая плита 4 вступает во взаимодействие с датчиком 37, в результате чего на его выходе появляется сигнал, который поступает на четвертый вход блока 33 и второй вход элемента 49 ИЛИ-НЕ. Наличие сигнала на одном из входов элемента 49 ИЛИ-НЕ вызывает исчезновение сигнала на его выходе,первом входе и выходе элемента 43 И, втором входе элемента 45 ИЛИ, четвертом входе элемента 48 ИЛИНЕ, втором выходе блока 33, входе исполнительного электромагнита 14 и входе сигнализатора 41 реализации команды НАЗАД, в результате чего они отключаются, прекращается гидроциркуляция в гибких шлангах 17, 18, 19, 20, 21, 25 и вращение приводного вала 11 гидровращателя 8, перемещение НАЗАД каретки 5 и выталкивающей плиты 4. На этом рабочий цикл заканчивается, оператор организует повторную загрузку кузова 1 новой порцией мусора через окно 51, а дальше все повторяется аналогично вышеизложенному в заданной по программе функциональной последовательности пуск привода кареткипередвижение ВПЕРЕД каретки и выталкивающей плитыперемещение загруженного мусорауплотнение в конце кузова загруженного мусора до нужной кондицииавтоматический возврат НАЗАД каретки и выталкивающей плитыостанов каретки и выталкивающей плиты в исходном начальном положении. Таким образом, оператор, за исключением участия в кратковременном пуске привода каретки, полностью освобождается от процедуры дальнейшего управления и имеет возможность путем использования освободившегося времени одновременно (параллельно) выполнять другие необходимые виды работ, например возврат опорожненного контейнера на свое месторасположение, что значительно сокращает потери времени и способствует повышению производительности мусоровоза. После окончательного плотного заполнения всего кузова мусором оператор организует его доставку на мусороперерабатывающий полигон. Так как материал максимально уплотнен, то значительно увеличивается его вместимость в кузове, в результате чего сокращается количество рейсов на мусороперерабатывающий полигон, а также в связи с этим уменьшаются потери времени, расход горюче-смазочных материалов и эксплуатационно-транспортные затраты, повышается работоспособность и производительность мусоровоза. Прежде чем приступить к удалению содержимого из кузова оператор сначала посредством стандартного привода, а именно, гидроцилиндра 52, обеспечивает поворот вокруг шарнира 53 заднего борта 54 в верхнее крайнее положение, а затем переводит рукоятку переключателя 39 режимов работы в положение 0 (выгрузка), после чего исчезает сигнал на его выходе, шестом входе блока 33 управления и первом входе элемента 44 И (запрет фиксации максимального усилия сжатия мусора). После этого оператор, убедившись в готовности мусоровоза к выгрузке, воздействует на кнопку 34, в результате чего аналогично вышеизложенному происходит запуск привода каретки 5 и передвижение ВПЕРЕД выталкивающей плиты 4, которая по ходу движения также перемещает содержимый в кузове уплотненный мусор наружу, при этом датчик 15 не принимает участия в управлении, но используется для визуальной информации нагрузки на выталкивающую плиту, благодаря чему значительно улучшаются условия обслуживания, создается возможность мгновенного реагирования при отклонениях от нормы, что исключает аварийные ситуации и гарантирует высокую работоспособность мусоровоза. При прибытии каретки 5 в конец кузова 1 завершается выгрузка мусора, и выталкивающая плита 4 вступает во взаимодействие с датчиком 38, в результате чего на его выходе появляется сигнал, который поступает на первый вход блока 33 и первый вход элемента 48 ИЛИ-НЕ. Наличие сигнала на одном из входов элемента 48 ИЛИ-НЕ вызывает исчезновение сигнала на его выходе,первом входе и выходе элемента 42 И, втором входе элемента 45 ИЛИ, третьем входе элемента 49 ИЛИ-НЕ,первом выходе блока 33, входе исполнительного электромагнита 13 гидрораспределителя 12 и входе сигнализатора 40, информирующем об отключении привода каретки 5 и останове выталкивающей плиты 4 в крайнем конечном положении кузова 1. Возврат каретки 5 и выталкивающей плиты 4 в исходное начальное положение осуществляется аналогично вышеизложенному путем воздействия на кнопку 35 НАЗАД. После прибытия и автоматического останова каретки 5 и выталкивающей плиты 4 в исходном начальном положении оператор посредством гидроцилиндра 52 обеспечивает поворот вокруг шарнира 53 заднего борта 54 в нижнее крайнее закрытое положение. После этого оператор обеспечивает возврат мусоровоза для повторной загрузки кузова мусором и т.д. На основании вышеизложенного видно, что предлагаемый мусоровоз выгодно отличается от аналогичных известных мусоровозов и имеет следующие преимущества. 4453 1 Во-первых, за счет применения датчика усилия сжатия мусора и оригинального схемно-логического выполнения блока управления, а также предложенного их подключения удалось автоматизировать процесс управления приводом каретки, при этом возврат каретки и выталкивающей плиты происходит только после максимального уплотнения мусора, что значительно повышает вместимость мусора в кузове и сокращает в связи с этим количество рейсов на мусороперерабатывающий полигон, уменьшает потери времени, расход горючесмазочных материалов и эксплуатационно-транспортные затраты, повышает работоспособность мусоровоза. Во-вторых, применение предложенной системы автоматического управления приводом каретки позволяет оператору за счет освободившегося времени параллельно (одновременно) с процессом перемещения и уплотнения загруженного мусора осуществлять другие необходимые виды работ, например возврат опорожненного контейнера на свое месторасположение, благодаря чему значительно сокращаются потери времени,что способствует повышению производительности мусоровоза. В-третьих, наличие в системе управления приводом каретки датчика сжатия мусора с измерительной шкалой и сигнализаторов реализации команд ВПЕРЕД и НАЗАД позволило оператору визуально контролировать динамическое состояние выталкивающей плиты в закрытом пространстве кузова, благодаря чему значительно улучшаются условия обслуживания и обеспечивается возможность мгновенного реагирования при отклонениях от нормы, что исключает аварийные ситуации и гарантирует высокую работоспособность мусоровоза. В-четвертых, наличие в системе управления приводом каретки переключателя режимов работы ЗАГРУЗКА и ВЫГРУЗКА и применение предложенного его подключения позволило расширить функциональные возможности мусоровоза и улучшить его работоспособность. Таким образом, предлагаемый мусоровоз является высокопроизводительным, удобным в обслуживании и эффективным в использовании, поэтому может найти самое широкое применение в народном хозяйстве. Источники информации 1. А.с. СССР 1209525, МПК 65 3/02, 1984. 2. А.с. СССР 1399225, МПК 65 3/00, 1986. 3. Патент ФРГ 1262901, МПК 65 3/00, 1962. Национальный центр интеллектуальной собственности. 220072, г. Минск, проспект Ф. Скорины, 66. 8
МПК / Метки
Метки: мусоровоз
Код ссылки
<a href="https://by.patents.su/8-4453-musorovoz.html" rel="bookmark" title="База патентов Беларуси">Мусоровоз</a>
Мусоровоз
Номер патента: 3923
Опубликовано: 30.06.2001
Авторы: Панасюк Анатолий Иванович, Коннов Валерий Викторович
Метки: мусоровоз
Текст:
...с соответствующими зубчатыми рейками и размещенных на промежуточных валах, связанных с валом приводного двигателя, в соответствии с изобретением каретка дополнительно снабжена опорными и ограничительными катками в виде цилиндрических роликов с ребордами, а каждая зубчатая рейка выполнена в виде П-образного короба, у которого боковые полки своими свободными концами повернуты вниз и между ними с шагом, равным шагу зубчатого колеса с...
Мусоровоз
Номер патента: 3942
Опубликовано: 30.06.2001
Авторы: Давыдков Владимир Евгеньевич, Летунович Василий Евгеньевич, Тышкевич Роман Иосифович, Позняк Сергей Арсеньевич, Давыдков Андрей Владимирович
МПК: B65F 3/00
Метки: мусоровоз
Текст:
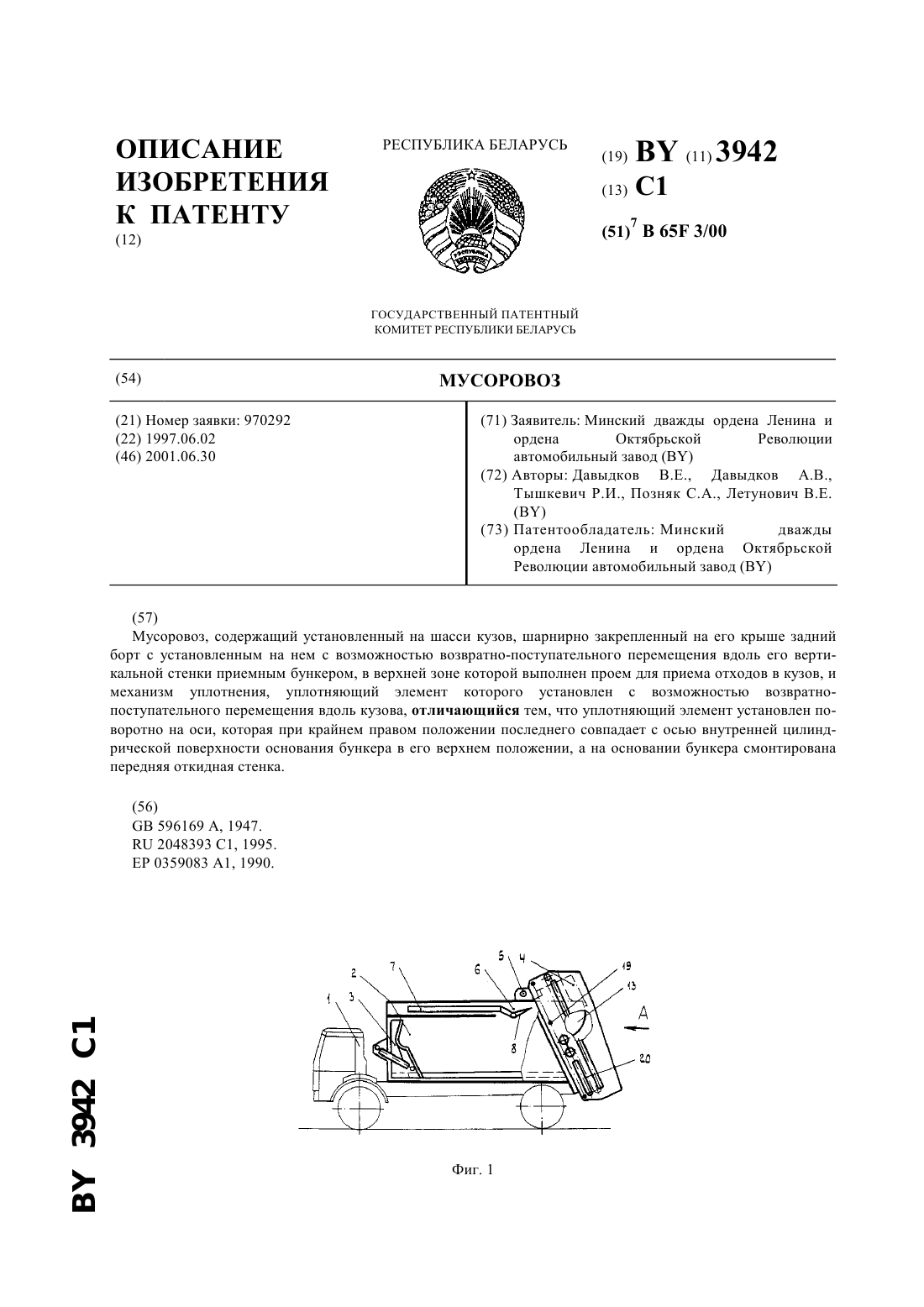
...максимальное заполнение объема кузова и возможность одновременной загрузки как твердыми, так и деформируемыми отходами. На фиг. 1 изображена схема мусоровоза в транспортном положении на фиг. 2 - вид А на фиг. 1 на фиг. 3 - продольный разрез заднего борта по Б-Б на фиг. 2 на фиг. 4 - разрез В-В на фиг. 3 на фиг. 5 - кузов, механизм уплотнения в нерабочем положении, приемный бункер в положении загрузки на фиг. 6 - кузов, бункер в...
Сумматор унитарных кодов по модулю три
Номер патента: 2305
Опубликовано: 30.09.1998
Авторы: Авгуль Леонид Болеславович, Супрун Валерий Павлович
МПК: G06F 7/49
Метки: модулю, кодов, три, сумматор, унитарных
Текст:
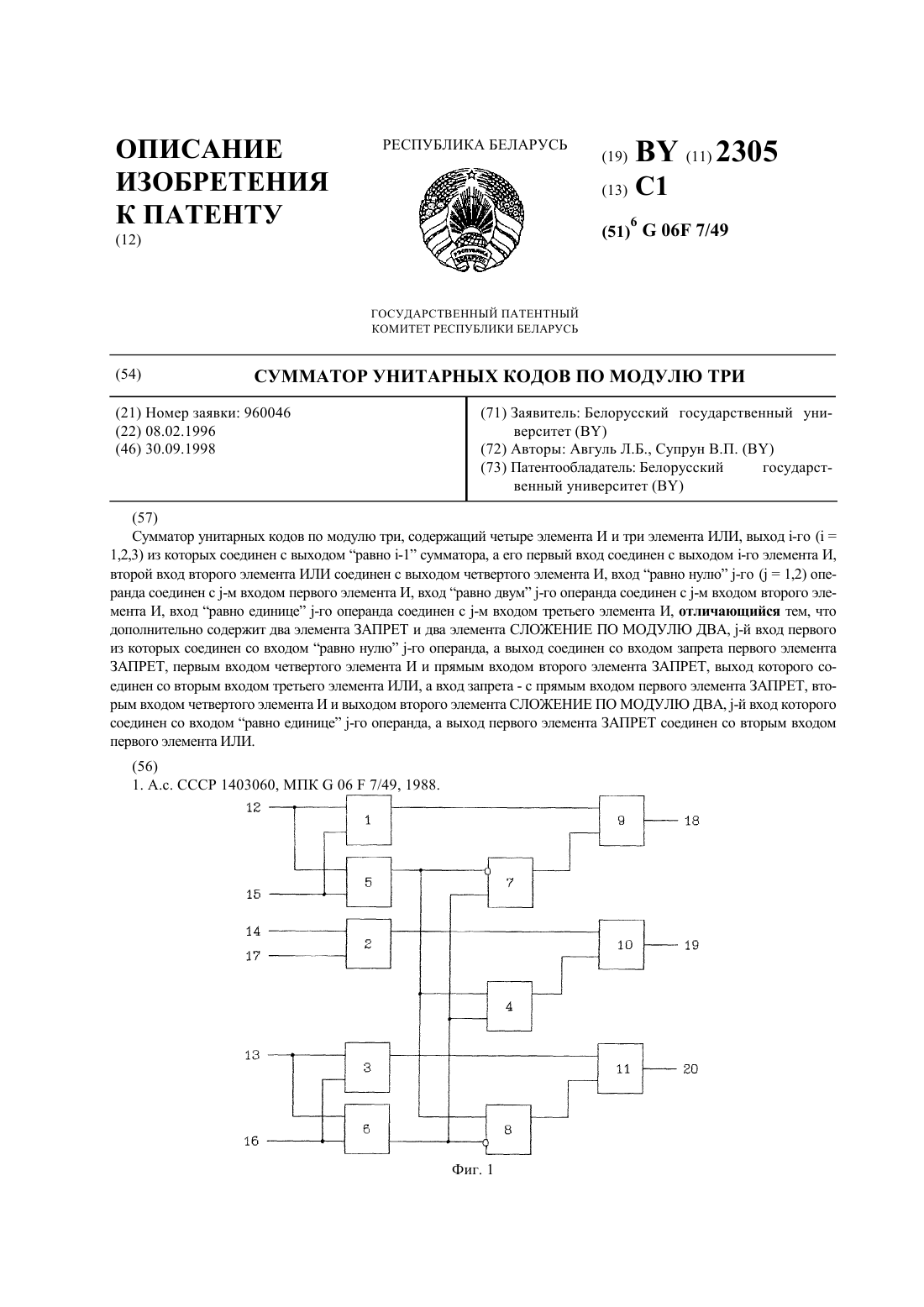
...три содержит четыре элемента И и три элемента ИЛИ. Выход -г (1, 2, 3) элемента ИЛИ соединен с выходом равно -1 сумматора, а его первый вход соединен с выходом -г элемента И. Второй вход второго элемента ИЛИ соединен с выходом четвертого элемента И, вход равно нулю-го (1, 2) операнда соединен с -м входом первого элемента И. Вход равно двум -го операнда соединен с -м входом второго элемента И, вход равно единице -го операнда соединен с -м...
Устройство для вычисления фундаментальных симметрических булевых функций
Номер патента: 2990
Опубликовано: 30.09.1999
Авторы: Супрун Валерий Павлович, Седун Андрей Максимович
МПК: G06F 7/00
Метки: устройство, булевых, фундаментальных, симметрических, функций, вычисления
Текст:
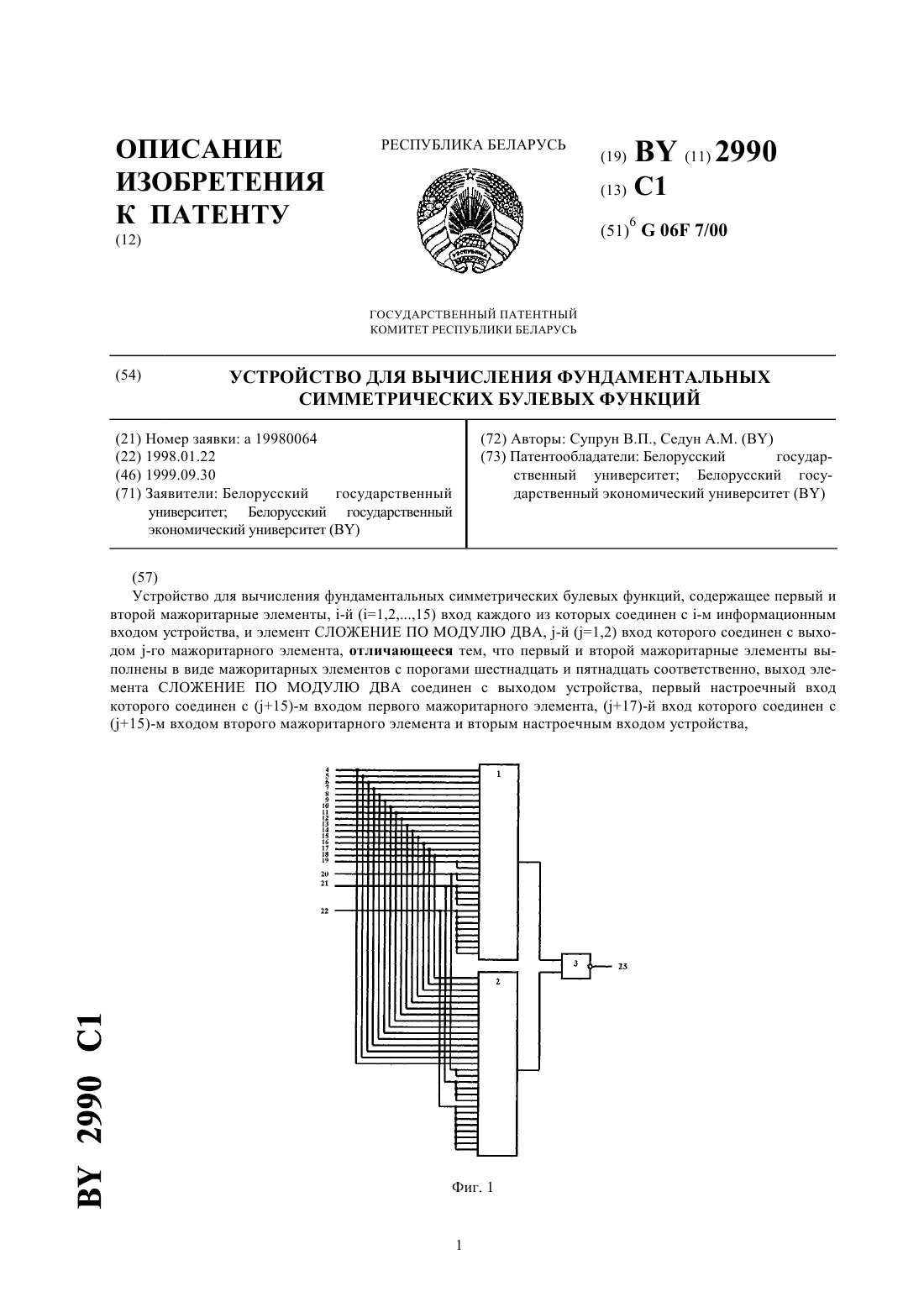
...университет(57) Устройство для вычисления фундаментальных симметрических булевых функций, содержащее первый и второй мажоритарные элементы, -й (1,215) вход каждого из которых соединен с -м информационным входом устройства, и элемент СЛОЖЕНИЕ ПО МОДУЛЮ ДВА, -й (1,2) вход которого соединен с выходом -го мажоритарного элемента, отличающееся тем, что первый и второй мажоритарные элементы выполнены в виде мажоритарных элементов с...
Сумматор по модулю пятнадцать

Номер патента: 2626
Опубликовано: 30.03.1999
Авторы: Петроченко Андрей Сергеевич, Трухан Олег Константинович, Авгуль Леонид Болеславович, Супрун Валерий Павлович
МПК: G06F 7/49
Метки: модулю, сумматор, пятнадцать
Текст:
...на решение задачи повышения быстродействия и уменьшения конструктивной сложности сумматора по модулю пятнадцать. Поставленная задача решается тем, что в сумматор по модулю пятнадцать, содержащий восемь элементов И и четыре элемента сложения по модулю два, -й (,2) вход - (,2,3) из которых соединен с входом(1)-го разряда -го операнда, вход первого разряда второго операнда соединен с первым входом четвертого элемента сложения по модулю...
Предыдущий патент: Способ очистки почвы от радионуклидов
Следующий патент: Способ очистки газов от аммиака
Случайный патент: Штамм Salmonella enteritidis КМИЭВ-В 116 – штамм-антиген