Способ измерения массового расхода


Текст
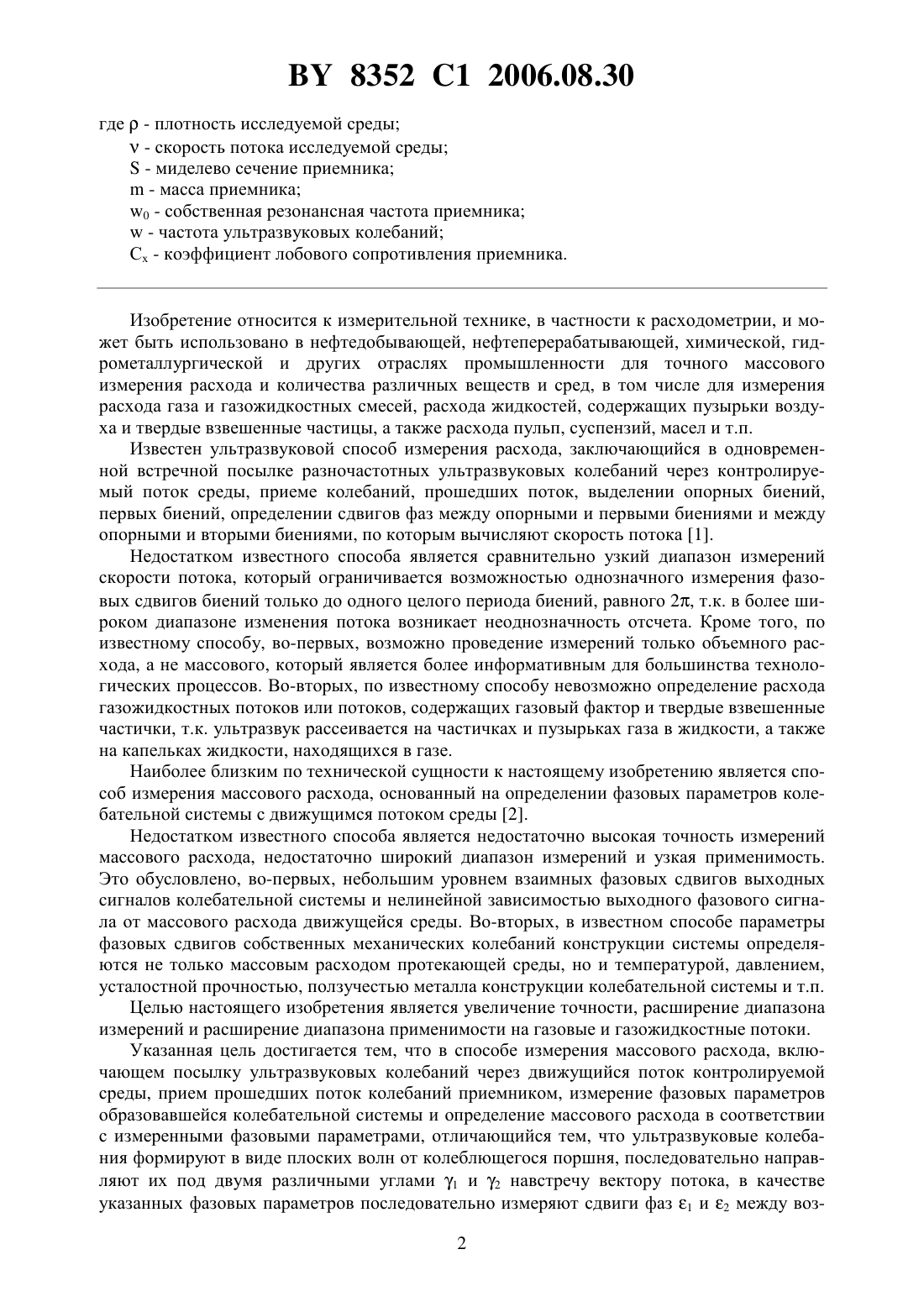
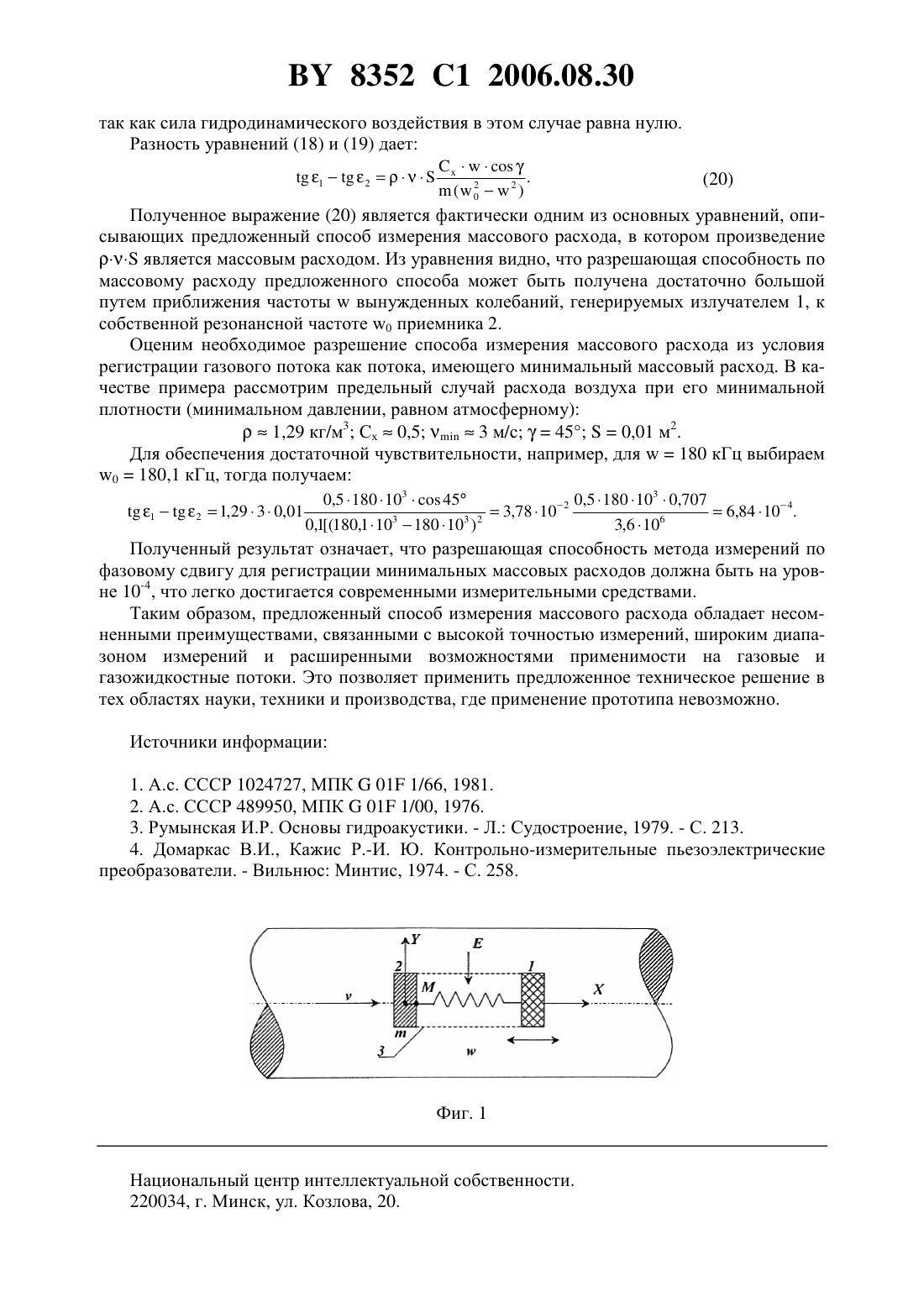
НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ИЗМЕРЕНИЯ МАССОВОГО РАСХОДА(71) Заявители Научно-исследовательское учреждение Институт прикладных физических проблем имени А.Н. Севченко Белорусского государственного университета Чернобай Иван Александрович(72) Автор Чернобай Иван Александрович(73) Патентообладатели Научно-исследовательское учреждение Институт прикладных физических проблем имени А.Н. Севченко Белорусского государственного университета Чернобай Иван Александрович(57) Способ измерения массового расхода, включающий посылку ультразвуковых колебаний через движущийся поток контролируемой среды, прием прошедших поток колебаний приемником, измерение фазовых параметров образовавшейся колебательной системы и определение массового расхода в соответствии с измеренными фазовыми параметрами,отличающийся тем, что ультразвуковые колебания формируют в виде плоских волн от колеблющегося поршня, последовательно направляют их под двумя различными углами 1 и 2 навстречу вектору потока, в качестве указанных фазовых параметров последовательно измеряют сдвиги фаз 1 и 2 между возбуждающими колебаниями поршня и пульсирующим давлением среды для углов измерения 1 и 2 соответственно, а массовый расход,равный произведению , определяют в соответствии с выражением 8352 1 2006.08.30 где- плотность исследуемой среды- скорость потока исследуемой среды- миделево сечение приемника- масса приемника 0 - собственная резонансная частота приемника- частота ультразвуковых колебаний Сх - коэффициент лобового сопротивления приемника. Изобретение относится к измерительной технике, в частности к расходометрии, и может быть использовано в нефтедобывающей, нефтеперерабатывающей, химической, гидрометаллургической и других отраслях промышленности для точного массового измерения расхода и количества различных веществ и сред, в том числе для измерения расхода газа и газожидкостных смесей, расхода жидкостей, содержащих пузырьки воздуха и твердые взвешенные частицы, а также расхода пульп, суспензий, масел и т.п. Известен ультразвуковой способ измерения расхода, заключающийся в одновременной встречной посылке разночастотных ультразвуковых колебаний через контролируемый поток среды, приеме колебаний, прошедших поток, выделении опорных биений,первых биений, определении сдвигов фаз между опорными и первыми биениями и между опорными и вторыми биениями, по которым вычисляют скорость потока 1. Недостатком известного способа является сравнительно узкий диапазон измерений скорости потока, который ограничивается возможностью однозначного измерения фазовых сдвигов биений только до одного целого периода биений, равного 2, т.к. в более широком диапазоне изменения потока возникает неоднозначность отсчета. Кроме того, по известному способу, во-первых, возможно проведение измерений только объемного расхода, а не массового, который является более информативным для большинства технологических процессов. Во-вторых, по известному способу невозможно определение расхода газожидкостных потоков или потоков, содержащих газовый фактор и твердые взвешенные частички, т.к. ультразвук рассеивается на частичках и пузырьках газа в жидкости, а также на капельках жидкости, находящихся в газе. Наиболее близким по технической сущности к настоящему изобретению является способ измерения массового расхода, основанный на определении фазовых параметров колебательной системы с движущимся потоком среды 2. Недостатком известного способа является недостаточно высокая точность измерений массового расхода, недостаточно широкий диапазон измерений и узкая применимость. Это обусловлено, во-первых, небольшим уровнем взаимных фазовых сдвигов выходных сигналов колебательной системы и нелинейной зависимостью выходного фазового сигнала от массового расхода движущейся среды. Во-вторых, в известном способе параметры фазовых сдвигов собственных механических колебаний конструкции системы определяются не только массовым расходом протекающей среды, но и температурой, давлением,усталостной прочностью, ползучестью металла конструкции колебательной системы и т.п. Целью настоящего изобретения является увеличение точности, расширение диапазона измерений и расширение диапазона применимости на газовые и газожидкостные потоки. Указанная цель достигается тем, что в способе измерения массового расхода, включающем посылку ультразвуковых колебаний через движущийся поток контролируемой среды, прием прошедших поток колебаний приемником, измерение фазовых параметров образовавшейся колебательной системы и определение массового расхода в соответствии с измеренными фазовыми параметрами, отличающийся тем, что ультразвуковые колебания формируют в виде плоских волн от колеблющегося поршня, последовательно направляют их под двумя различными углами 1 и 2 навстречу вектору потока, в качестве указанных фазовых параметров последовательно измеряют сдвиги фаз 1 и 2 между воз 2 8352 1 2006.08.30 буждающими колебаниями поршня и пульсирующим давлением среды для углов измерения 1 и 2 соответственно, а массовый расход, равный произведению , определяют в соответствии с выражением где- плотность исследуемой среды- скорость потока исследуемой среды- миделево сечение приемника- масса приемника 0 - собственная резонансная частота приемника- частота ультразвуковых колебаний Сх - коэффициент лобового сопротивления приемника. Физическая сущность способа измерения заключается в следующем. Пусть имеется механически связанная колебательная система, находящаяся в набегающем потоке жидкости или газа (в газожидкостном потоке) и состоящая из источника 1 вынужденных колебаний (излучателя 1) и жестко связанного с ним пьезокерамического приемника 2 колебаний массой , при этом сначала рассмотрим общий случай, при котором направление возбуждающих колебаний совпадает с вектором потока (фиг. 1). Пользуясь известными аналогами из теории механических колебаний можно принять,что возмущающая сила , эквивалентная распределенной силе и действующая со стороны излучателя 1 на приемник 2, является сосредоточенной и приложена к его центру. Можно также принять, что массаприемника 2 сосредоточена в его центре. Излучатель 1 совершает продольные колебания вдоль оси х. Передвижению излучателя 1 и приемника 2 в направлении оси у препятствуют боковые стенки датчика 3. Рассмотрим материальную точку М, совершающую прямолинейное движение под действием восстанавливающей силы Р, возмущающей силы , изменяющейся по гармоническому закону, и силы сопротивления среды . Направим осьпо траектории движения точки М, поместив начало координат в положение покоя точки. Определим проекции сил Р, ,на осьв момент времени , когда движущаяся точка М имеет координату х. Проекция восстанавливающей силы, направленной к положению покоя и связанной с упругостью колеблющейся среды, равна Рх-Е,где Е - коэффициент жесткости- смещение. Сила сопротивления средыопределяется физической природой возникновения этой силы и выражается по следующей формулегд,2 гдег 0,5 - гидродинамическая сила Сх - коэффициент лобового сопротивления, изменяющийся в пределах 0 Сх 1 и зависящий от геометрической формы колеблющегося тела в среде- миделево сечение приемника 2- плотность исследуемой- скорость движения приемника 2 а- сила сопротивлению акустического излучения С - скорость звука в ис следуемой средед- сила механического демпфирования конструкции датчика 3- коэффициент демпфирования для данной конструкции датчика 3. Преобразуем правую часть выражения Данное преобразование и принятое допущение для скоростейиявляется основой для линеаризации дифференциального уравнения, описывающего колебательный процесс. В дальнейшем постоянным слагаемым 0,5 Сх 2 в величине силы г пренебрегаем, исходя из того, что его значение компенсируется за счет статических сил, обусловленных реакцией конструкции датчика 3. 3 8352 1 2006.08.30 С учетом приведенных преобразований запишем соотношение для проекции на осьсилы сопротивления Проекция возмущающей силы , изменяющейся по гармоническому закону, определяется формулойА,где А - амплитуда возмущающей силы со стороны излучателя- начальная фаза изменения возмущающей силы - текущая (мгновенная) фаза изменения возмущающей силы- время. Определим результирующую силу , действующую на пьезокерамический приемник 2 массой. Подставляя в это уравнение соответствующие выражения, получим где пр - присоединенная масса. Присоединенной массой пр в дальнейшем пренебрегаем, вследствие ее малой величины. Действительно, согласно 3, можно принять, чтопр Для пьезоэлектрического приемника 0,1 кг, т.е. имеет место пр. Все члены,содержащие координатуили ее производные, перенесем в левую часть и разделим на ,тогда получим 2 Полученное уравнение (2) является дифференциальным уравнением движения материальной точки под действием вышеизложенных сил. Коэффициенты при членах уравнения имеют следующий физический смысл 20 - квадрат частоты свободных колебаний 0- отношение амплитуды возмущающей силы к массе. С учетом этого уравнение (2) записывается в виде 2 Для кратности записи обозначим 2 . В результате этого дифференциальное уравнение принимает вид 220. можно определить, согласно 4, по следующей формуле 20(20 ) 2 8352 1 2006.08.30 где 0 - основная резонансная частота приемника 2, т.е. частота, на которой электрически ненагруженный приемник обладает максимальной чувствительностью 0 - толщина приемника 2- скорость продольных упругих волн в приемнике 2 (в пьезоэлектрической пластинке). Общее решение уравнения (3) состоит из общего решения х 1, соответствующего ему однородного уравнения 220,и частного решения х 2 вышеприведенного уравнения (3)12. Частное решение уравнения (3) будем искать в виде(4) х 2 В,где В - амплитуда вынужденных колебаний- разность между фазойвынужденных колебаний и фазойвозмущающей силы. Найдя производные (4) и подставив соответствующие выражения в (3), получим 2(5) В 2(-)2(-)В 0 (-). Преобразуем правую часть уравнения (5)(7) В(0 -2)-(-)(2- )(-)0. Равенство (7) будет справедливо при любых значениях аргумента-, если будут равны нулю коэффициенты при (-) и (-) 2 Таким образом, частное решение дифференциального уравнения (3) запишем в виде 2 Общее решение однородного дифференциального уравнения (3) зависит от соотношения величини 0. Получение указанного решения не предоставляет особых математических трудностей, поэтому запишем общее решение уравнения (3) при 0 2 Входящие в уравнения (12), (13) постоянныеи , а также постоянные 1 и С 2 уравнения (14) определяются исходя из начальных условий движения. Поскольку в дальнейшем будет рассматриваться установившийся режим колебаний через достаточно большой промежуток времени после начала движения, то на основании уравнений (11), (12), (13) и (14) результирующее колебательное движение будет состоять из вынужденных колебаний, описываемых уравнением Полученное выражение (15) является решением дифференциального уравнения, описывающего предложенный метод измерений, при этом решение содержит амплитуду (9) и фазу (10) вынужденных колебаний относительно возбуждающих колебаний. Подставим в уравнение (9) конкретные величины, тогда получим Анализируя зависимость амплитуды вынужденных колебаний от произведения ,представляющего собой массовый расход, можно сделать вывод, что эта зависимость является сложной, т.к. точность ее определения в соответствии с (16) зависит от акустического сопротивления среды с, степени демпфирования , соотношения частот 0 и ,стабильности амплитуды возбуждающих колебаний А 0 и т.п. Подставим в уравнение (10) конкретные значения величин, тогда получим Выражение (17) связывает сдвиг фазы вынужденных колебаний приемника 2 связанной колебательной системы относительно возбуждающих колебаний излучателя 1 в зависимости от массового расхода . Сдвиг фазы меняется также при изменении акустического сопротивления излучателю с и параметра демпфирования . Применив дифференциальную схему измерений, согласно которой по предложенному способу возбуждающие колебания получают в виде плоских волн от колеблющегося поршня, например пьезоэлектрического излучателя, направляют излучение поршня под одним углом по отношению к вектору потока, например навстречу потоку, и измеряют первый сдвиг фаз между возбуждающими колебаниями поршня и пульсирующим давлением движущейся среды, затем излучение поршня направляют под другим углом по отношению к вектору потока, например перпендикулярно потоку, и измеряют второй сдвиг фаз между возбуждающими колебаниями поршня и пульсирующим давлением движущейся среды можно датчик 3 устанавливать, например, под углом 1 навстречу потоку, а затем под углом 2 навстречу потоку (фиг. 2). В этом случае достигается компенсация измерений акустического сопротивления излучению и параметра демпфирования. Рассмотрим более общий случай, когда датчик 3 устанавливается под угломнавстречу потока, а затем перпендикулярно потоку. Так, для первого случая можно записать 1 Соответственно для второго случая 2 8352 1 2006.08.30 так как сила гидродинамического воздействия в этом случае равна нулю. Разность уравнений (18) и (19) дает 12 Полученное выражение (20) является фактически одним из основных уравнений, описывающих предложенный способ измерения массового расхода, в котором произведениеявляется массовым расходом. Из уравнения видно, что разрешающая способность по массовому расходу предложенного способа может быть получена достаточно большой путем приближения частотывынужденных колебаний, генерируемых излучателем 1, к собственной резонансной частоте 0 приемника 2. Оценим необходимое разрешение способа измерения массового расхода из условия регистрации газового потока как потока, имеющего минимальный массовый расход. В качестве примера рассмотрим предельный случай расхода воздуха при его минимальной плотности (минимальном давлении, равном атмосферному)1,29 кг/м 3 Сх 0,53 м/с 450,01 м 2. Для обеспечения достаточной чувствительности, например, для 180 кГц выбираем 0180,1 кГц, тогда получаем 121,2930,01 Полученный результат означает, что разрешающая способность метода измерений по фазовому сдвигу для регистрации минимальных массовых расходов должна быть на уровне 10-4, что легко достигается современными измерительными средствами. Таким образом, предложенный способ измерения массового расхода обладает несомненными преимуществами, связанными с высокой точностью измерений, широким диапазоном измерений и расширенными возможностями применимости на газовые и газожидкостные потоки. Это позволяет применить предложенное техническое решение в тех областях науки, техники и производства, где применение прототипа невозможно. Источники информации 1. А.с. СССР 1024727, МПК 01 1/66, 1981. 2. А.с. СССР 489950, МПК 01 1/00, 1976. 3. Румынская И.Р. Основы гидроакустики. - Л. Судостроение, 1979. - С. 213. 4. Домаркас В.И., Кажис Р.-И. Ю. Контрольно-измерительные пьезоэлектрические преобразователи. - Вильнюс Минтис, 1974. - С. 258. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 7
МПК / Метки
МПК: G01F 3/12, G01P 5/02, G01F 1/66
Метки: массового, расхода, способ, измерения
Код ссылки
<a href="https://by.patents.su/7-8352-sposob-izmereniya-massovogo-rashoda.html" rel="bookmark" title="База патентов Беларуси">Способ измерения массового расхода</a>
Устройство для измерения массового расхода
Номер патента: 1682
Опубликовано: 30.06.1997
Автор: Чернобай Иван Александрович
Метки: измерения, устройство, расхода, массового
Текст:
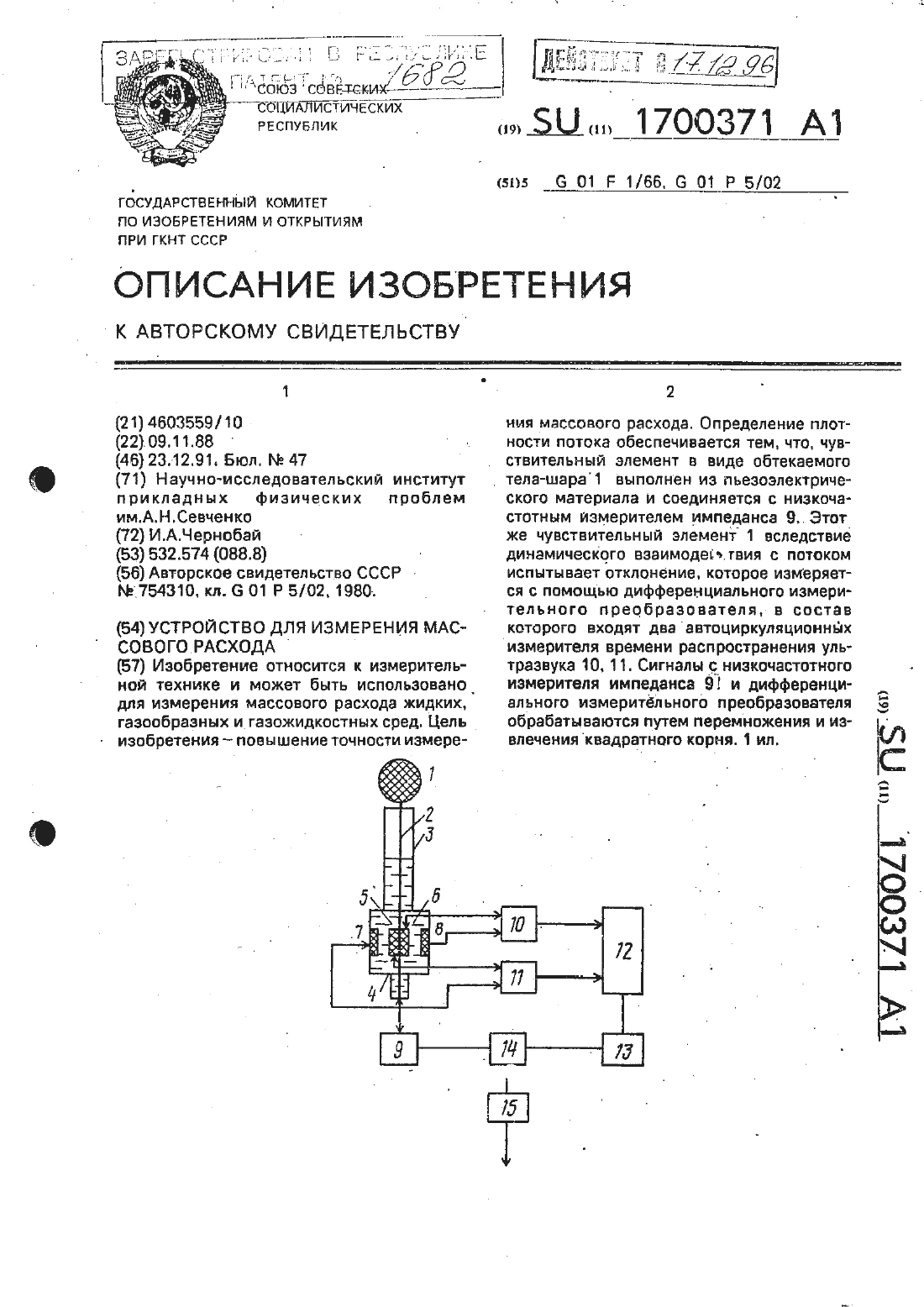
...импеданс становится пропорциональным только присоединенной массе и. с учетом постоянства геометрических параметров гидрофона-шара. импеданс пропорционален ПЛОТНОСТИ средыр.Перемножитель 14 сигналов осуществляет операцию умножения электрических сигналов. пропорциональных р М ир.Схема 15 извлечения квадратного корня извлекает из поступающей на его вход веЛИЧИНЫ сигнала квадратный корень.На выходе схемы 15. который является выходом устройства в...
Ультразвуковой частотный способ измерения расхода
Номер патента: 1681
Опубликовано: 30.06.1997
Автор: Чернобай Иван Александрович
МПК: G01F 1/66
Метки: частотный, измерения, расхода, ультразвуковой, способ
Текст:
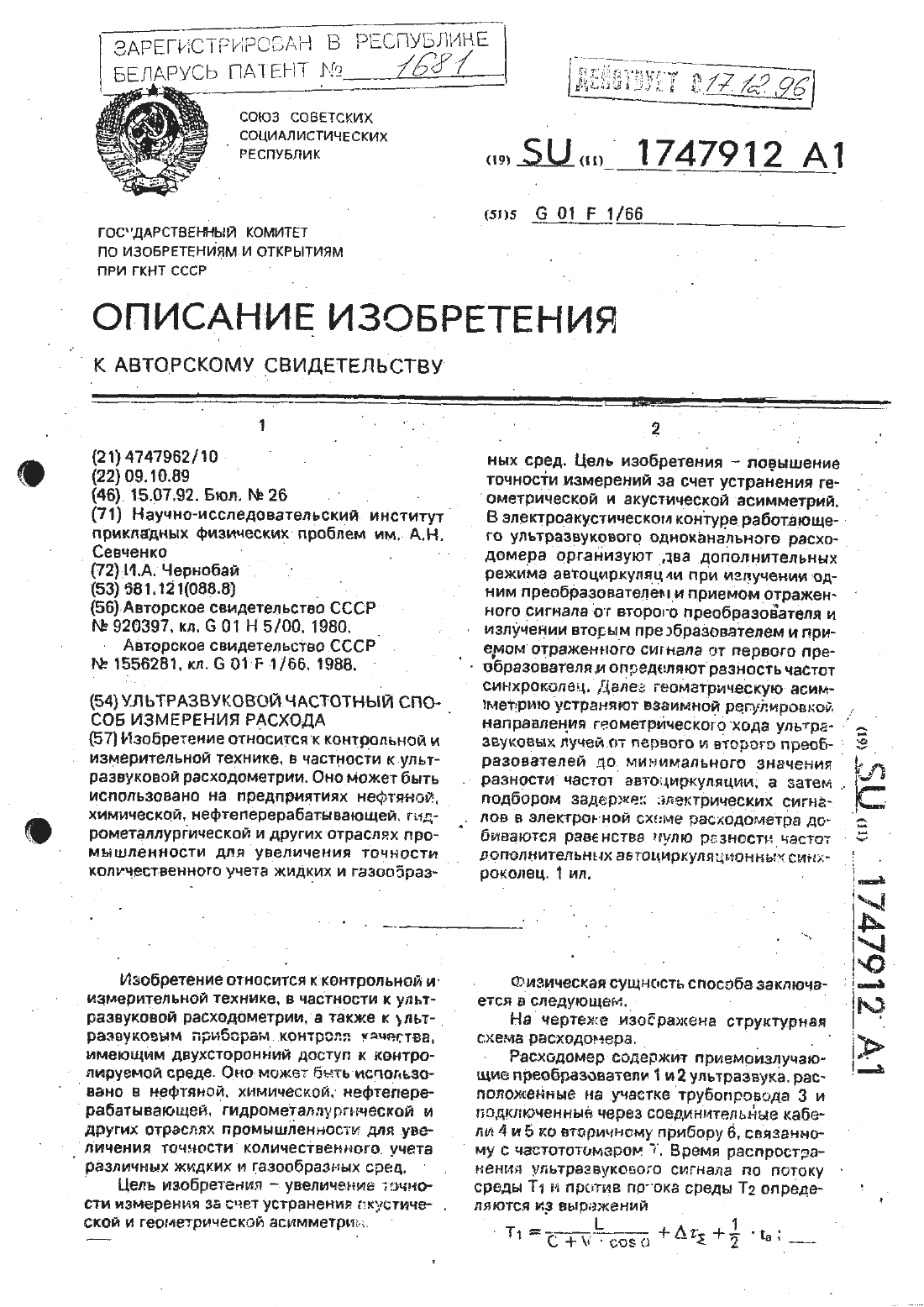
...ИЗ ВЫПЗ ЖЕНИЯПри этом скорость потока определяется по формулеасимметрии так возникает нелинейная взаи мосвязь между скоростью потока / и основной разностной частотой Аз расходомера. которая создает систематическую погрешность. Погрешности асимметрии можно считать скомпенсированными. если па 90 илиесли та может быть соответствующим обра зом учтена.Со стороны одного из преобразователеи организуется режим атвтоциркуляции путем излучения. приема и...
Способ измерения расхода сыпучего материала
Номер патента: 1749
Опубликовано: 30.09.1997
Автор: Бруно Гмюр
МПК: G01G 11/14, G01F 1/76
Метки: способ, расхода, сыпучего, измерения, материала
Текст:
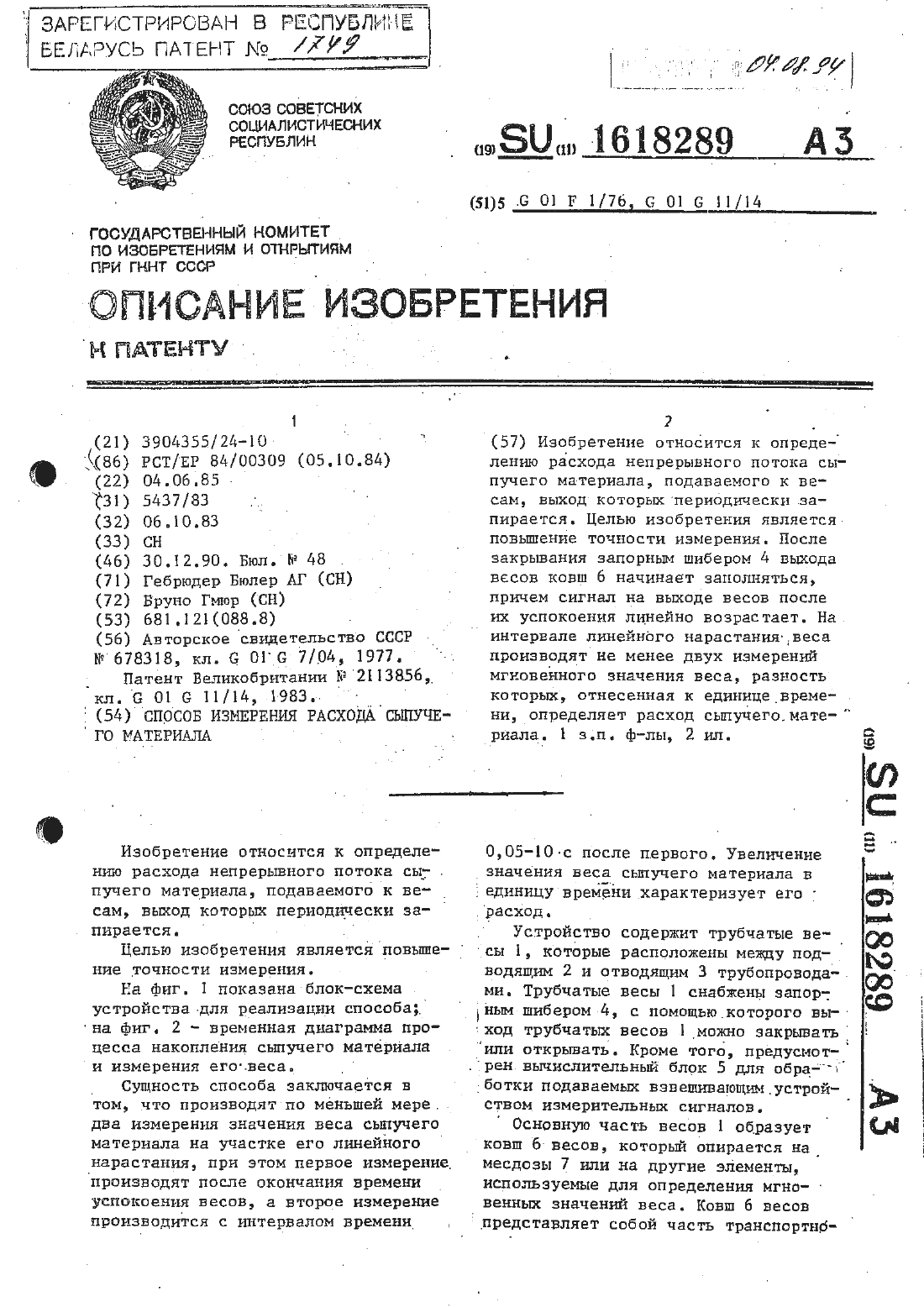
...Шибер остаетсян течение некоторого времени в открыТСПЧ ПОЛОЖЕНИИ, затем ВНОВЬ закрывается. После закрытия (новый момент закрытия вьжода весов или завершение движения, закрывается эапорньй шибер А) весь процесс повторяется, как показано на фиг. 2.При этом необходимо, чтобы В днапазоне линейного повышения измерен ного значения, т.е. в диапазоне от точки успокоения В до точки конца линейного увеличения веса Е, осуществлялись необходимые...
Способ измерения расхода тепла ( варианты )
Номер патента: 7611
Опубликовано: 30.12.2005
Автор: Рыбальченко Георгий Евгеньевич
МПК: G01K 17/16
Метки: варианты, измерения, способ, тепла, расхода
Текст:
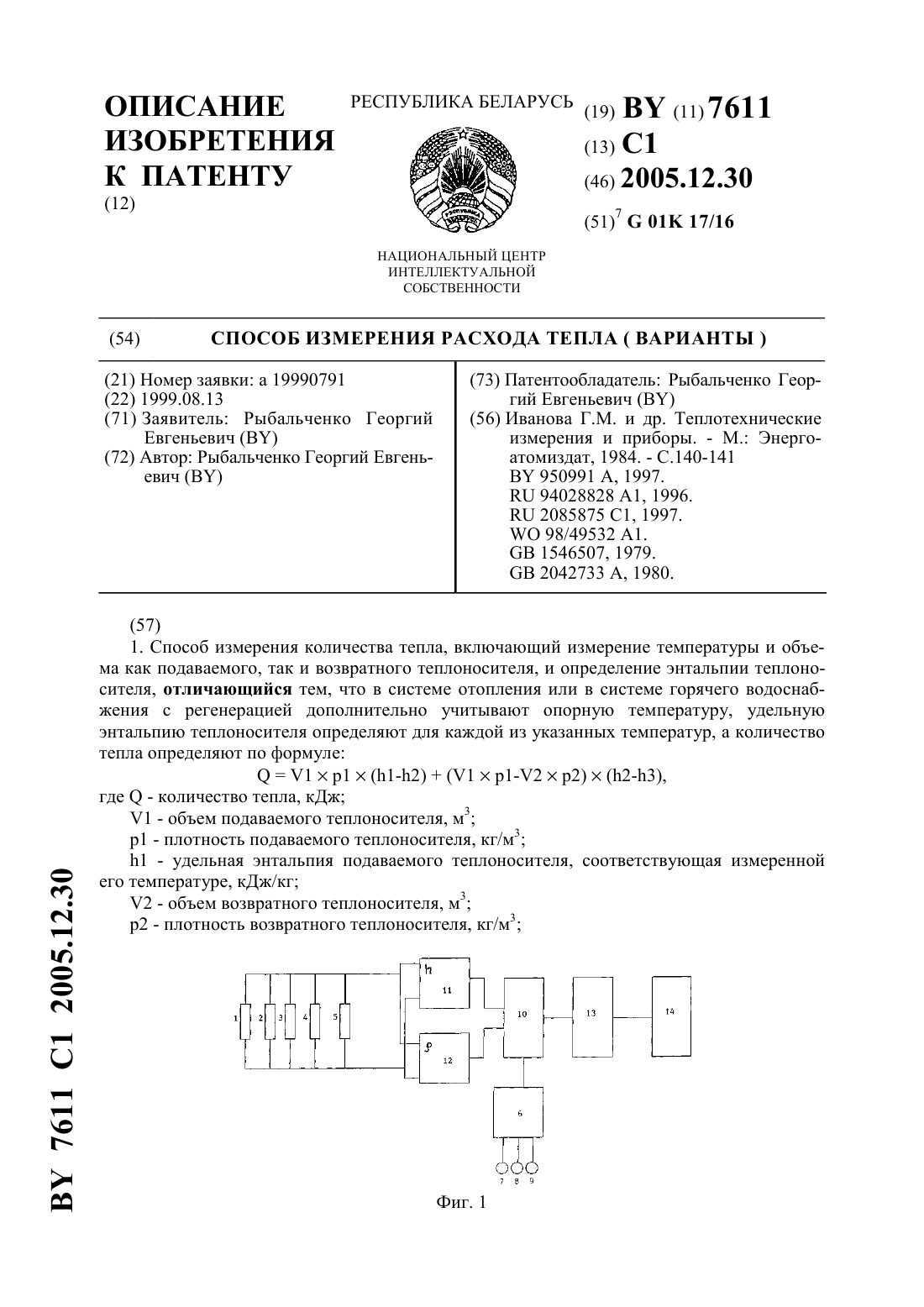
...тепла, кДж 1 - объем подаваемого теплоносителя, м 3 1 - плотность подаваемого теплоносителя, кг/м 3 1 - удельная энтальпия подаваемого теплоносителя соответствующая измеренной его температуре, кДж/кг 2 - объем возвратного теплоносителя, м 3 2 - плотность возвратного теплоносителя, кг/м 3 2 - удельная энтальпия возвратного теплоносителя, соответствующая измеренной его температуре, кДж/кг 3 - удельная энтальпия теплоносителя, соответствующая...
Устройство измерения расхода топлива
Номер патента: U 1039
Опубликовано: 30.09.2003
Авторы: Марков Александр Васильевич, Рядняный Олег Александрович, Слободский Леонид Яковлевич, Карташевич Александр Николаевич
МПК: G01F 1/66
Метки: измерения, устройство, топлива, расхода
Текст:
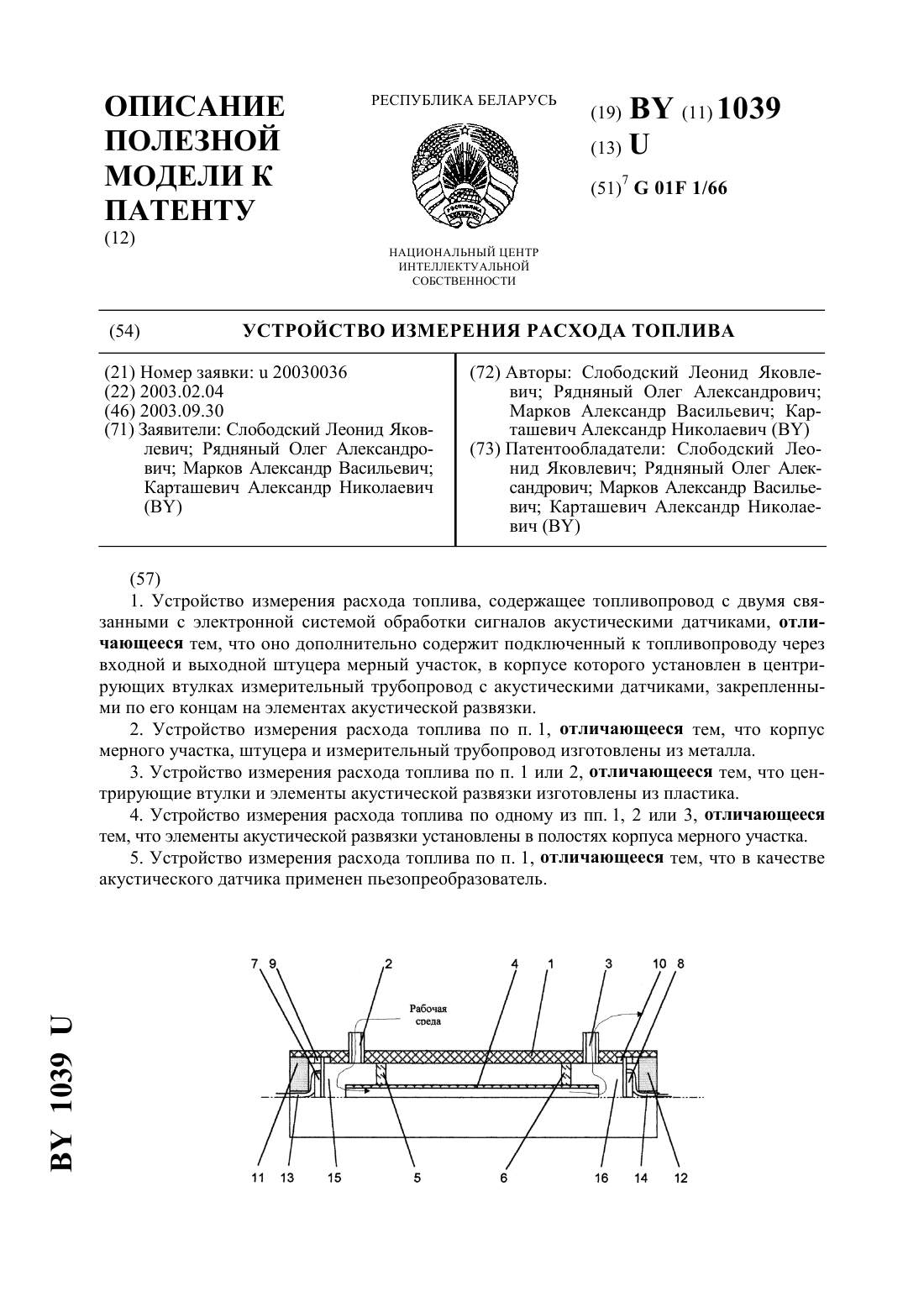
...из материалов, отличных от материалов корпуса и измерительного трубопровода. Сопоставительный анализ показывает отличия заявляемой конструкции от прототипа. Таким образом, она соответствует критерию новизна. Сравнение заявляемого решения с прототипом и с другими решениями в данной области не выявило признаки, отличающие заявляемое решение от прототипа, что позволяет сделать вывод о его соответствии критерию существенные отличия. Сущность...
Предыдущий патент: Среда для подготовки спермы к осеменению
Следующий патент: Способ лечения нейросифилиса
Случайный патент: Форсунка для распыления жидкостей