Устройство для обработки оптических деталей
Номер патента: 414
Опубликовано: 30.03.1995
Авторы: Видмант Ф. В., Трубицин Б. А., Чирков В. М., Крысин О. Г., Меньшиков Г. Г., Горелик В. В.
Текст
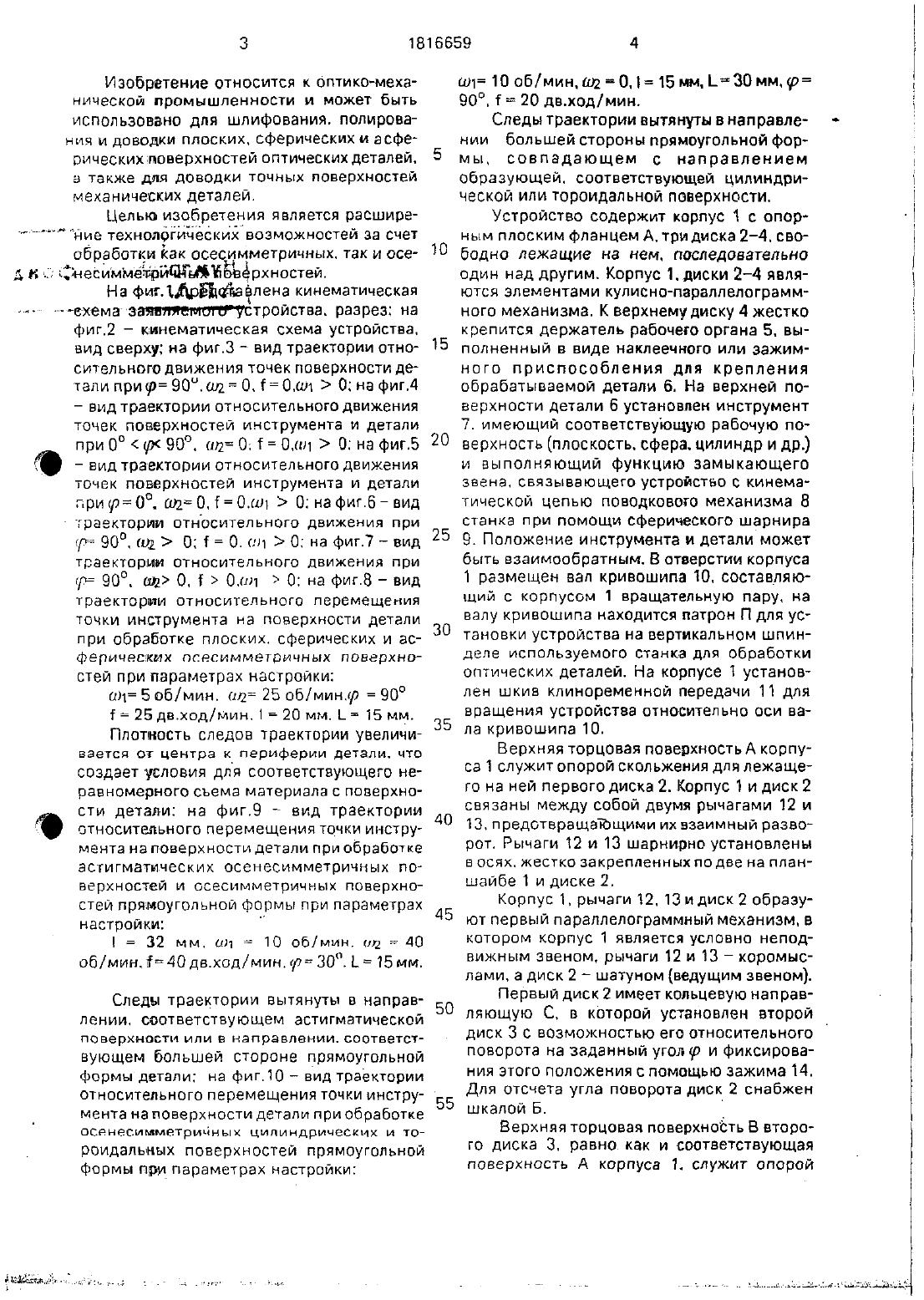
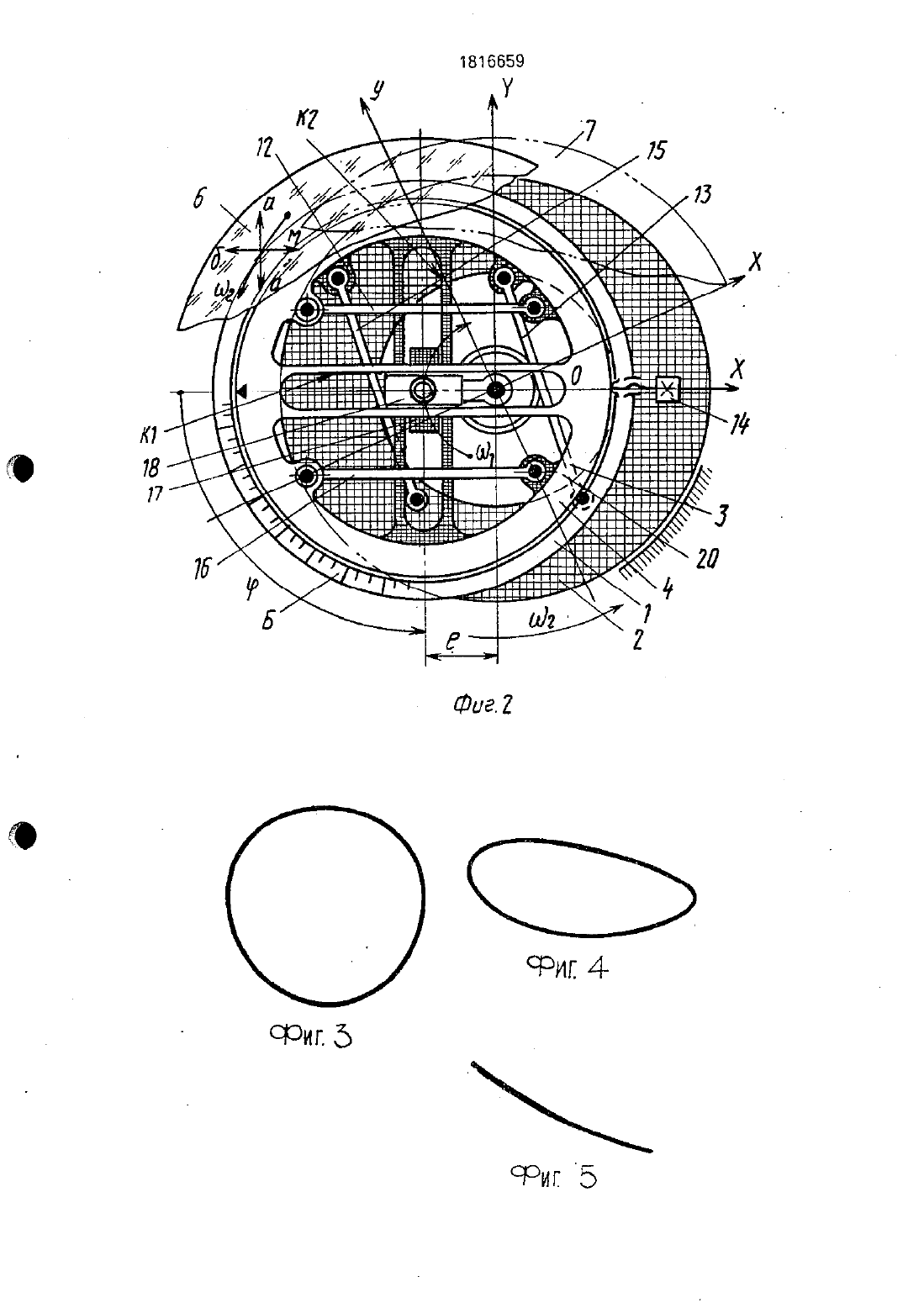
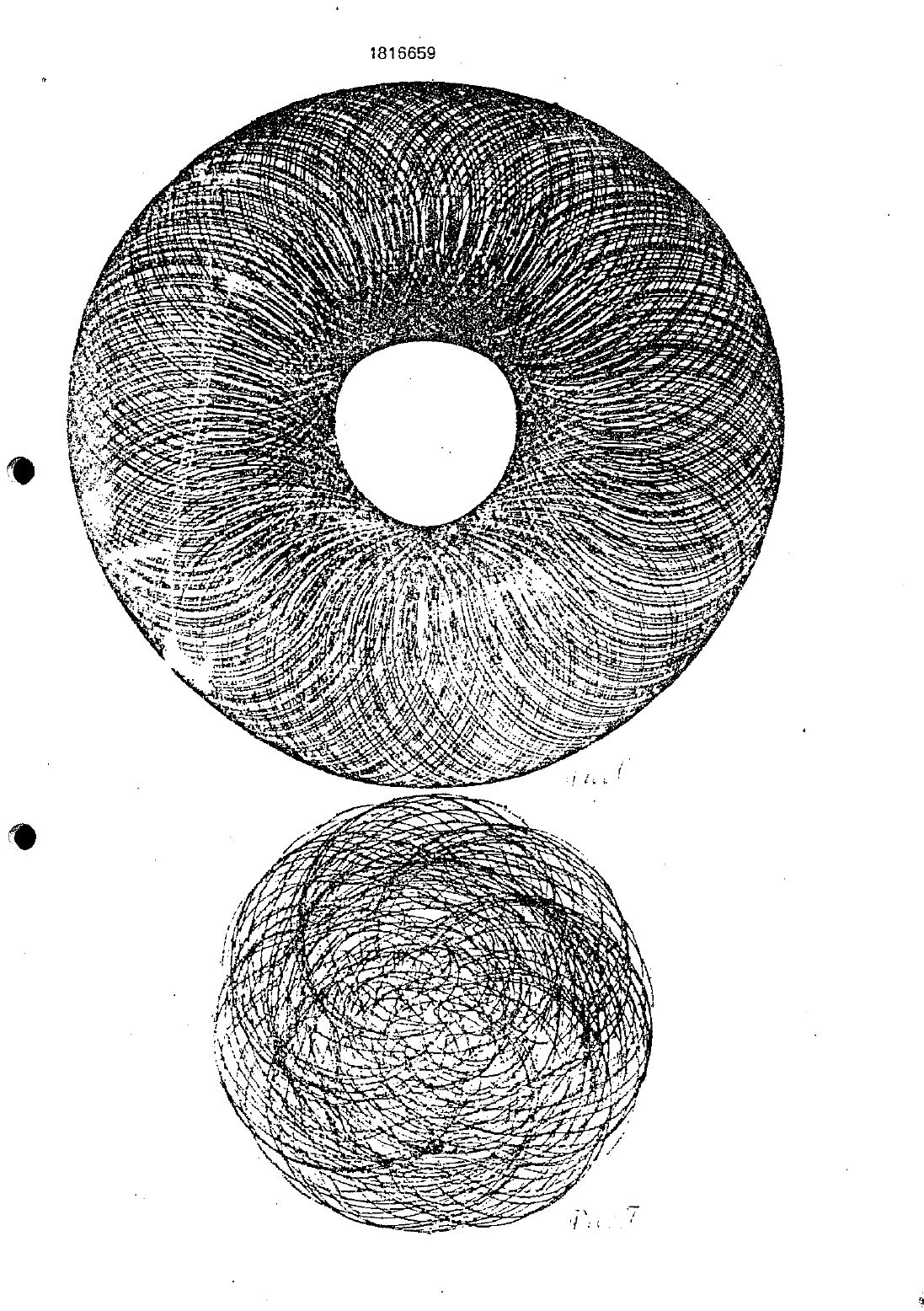
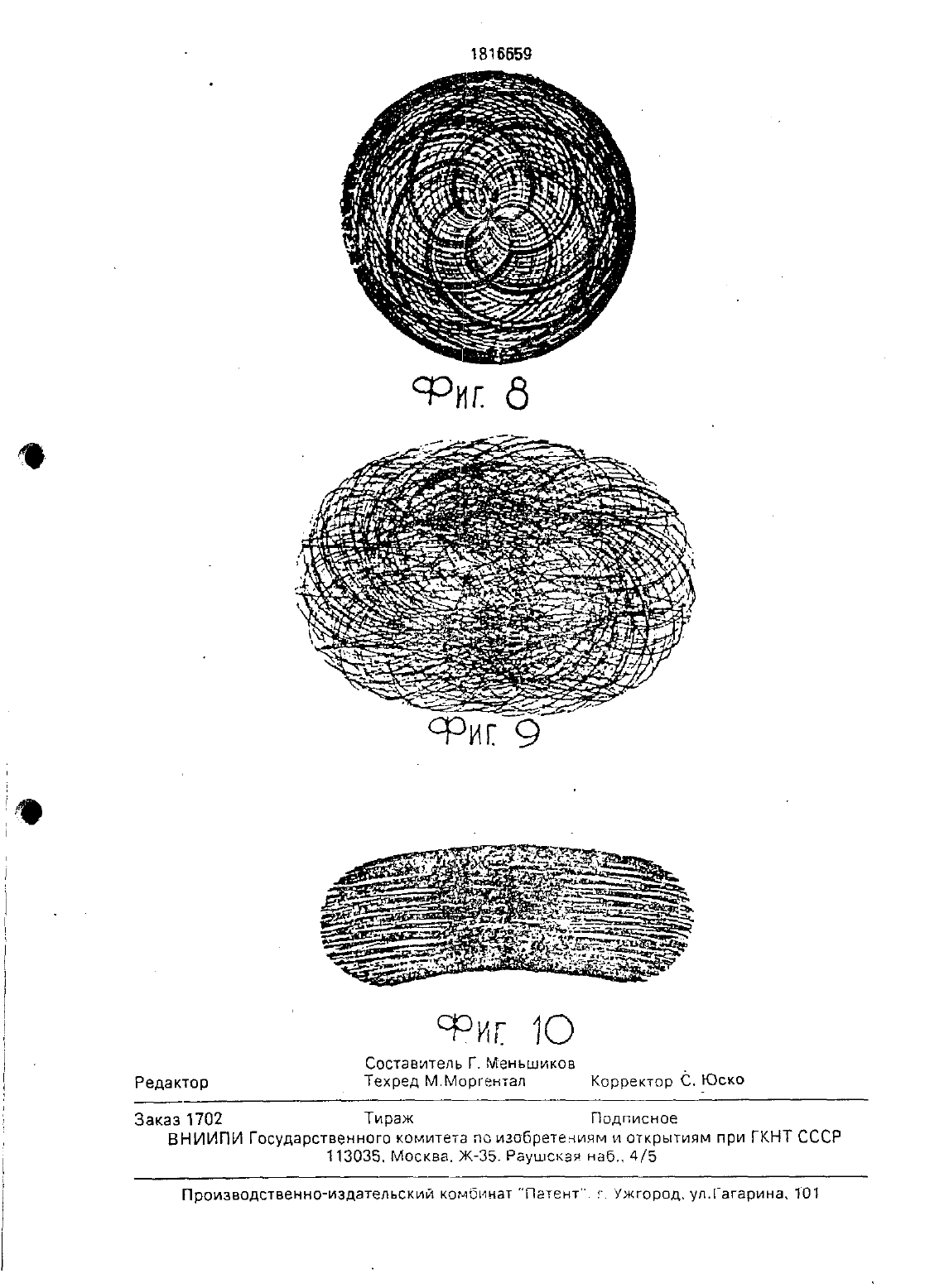
Изобретение относится к оптико-механической промышленности и может быть использовано для шлифования. полирова ния и доводки плоских. сферических и асферических поверхностей оптических деталей. а также для доводки точных поверхностей гиеханичеаских деталей.Целью изобретения является расширение технологических возможностей за счет обработки как осесимметричных. так и осе ерхностей. Н а фиг. ЦюЕЬота влена кинематическаяфи г 2 кинематическая схема устройства. вид сверху на фиг.3 вид траектории относительного движения точек поверхности детали при р 90. ш О. Г Оки О на фиг.4 вид траектории относительного движения точек поверхностей инструмента и детали при 0 ф 90. т 2 01 Оли 0 на фигб вид траектории относительного движения точек поверхностей инструмента и детали при ф О). Ш 2 О. Г Ошт О на фиг.6 видтраектории относительного движения приг/Тд 90). (из 01 О. он О на фиг.7 вид ТБЭЕКТОПИИ ОТНОСИТЕЛЬНОГО ДВИЖЕНИЯ при гр 9 О. ш 2 О. т Олп 0 на фиг.8 вид траектории относительного Перемещения точки инструмента на поверхности детали при обработке плоских. сферических и асФЕПИЧЕСГКИХ ОСЕСИГИГАЕТОИЧНЬПХ ПОВЕПХНО стей при параметрах настройкиПлотность следов траектории увеличивается от центра к периферии детали. что создает условия для соответствующего неравномерного съема материала с поверхности детали на фиг.9 вид траектории относительного перемещения точки инструмента на поверхности детали при обработке астигматинеских осенесимметричньтх поверхностей и осесимметричных поверхностей прямоугольной формы при параметрах настройкиСледы траектории вытянуты в направлении. соответствующем астигматической поверхности или в направлении. соответствующем большей стороне прямоугольной формы детали на фиг.1 О т вид траектории относительного перемещения точки инструмента на поверхности детали при обработке осенесимметричнык цилиндрических и тороидальных поверхностей прямоугольной формы при параметрах настройкиСледы траектории вытянуты в направлении большей стороны прямоугольной формы. совпадающем с направлением образующей. соответствующей цилиндрической или тороидальной поверхности.Устройство содержит корпус 1 с опорным плоским фланцем А. три диска 2-4. свободно лежащие на нем. последовательно один над другим. Корпус 1. диски 2-4 являются элементами кулисно-паралпелограммного механизма. К верхнему диску 4 жестко крепится держатель рабочего органа 5. выполненный в виде наклеечного или зажимного приспособления для крепления обрабатываемой детали б. На верхней поверхности детали б установлен инструмент 7. имеющий соответствующую рабочую поверхность (плоскость. сфера. цилиндр и др.) и выполняющий функцию замыкающего звена. связывающего устройство с кинематической цепью поводковото механизма 8 станка при помощи сферического шарнира 9. Положение инструмента и детали может быть взаимообратным. В отверстии корпуса 1 размещен вал кривошипа 10. составляющий с корпусом 1 вращательную пару. на валу кривошипа находится патрон П для установки устройства на вертикальном шпинделе используемого станка для обработки оптических деталей. На корпусе 1 установлен шкив клиноременной передачи 11 для вращения устройства относительно оси вала кривошипа 10.Верхняя торцовая поверхность А корпуса 1 служит опорой скольжения для лежащего на ней первого диска 2. Корпус 1 и диск 2 связаны между собой двумя рычагами 12 и13. предотвращающими их взаимный разворот. Рычаги 12 и 13 шарнирно установлены в осях. жестко закрепленных по две на планшайбе 1 и диске 2.Корпус 1, рычаги 12. 1 Зидиск 2 образуют первый параллелограммный механизм. в котором корпус 1 является условно неподвижным звеном, рычаги 12 и 13 коромыспами. а диск 2 шатуном (ведущим звеном).Первый диск 2 имеет кольцевую направляющую С. в которой установлен второй диск З с возможностью его относительногоповорота на заданный угол 50 и фиксирования этого положения с помощью зажима 14. Для отсчета угла поворота диск 2 снабжен шкалой Б.Верхняя торцовая поверхность В второго диска 3. равно как и соответствующая поверхность А корпуса 1. служит опоройскольжения для лежащего на ней третьего диска 4.Второй и третий диски 3 и 4 связаны между собой так же. как корпус 1 с первым диском 2 парой рычагов 15 и 16. установленных на шарниры. и образуют второй параллелограммный механизм. для которого условно неподвижным звеном является второй диск 3.В дисках 2 и 4 выполнены кулисы К 1 и К 2. симметрично расположенные относиТеЛЬНО ШЭОНИООВ. В ЭТИХ КУЛИСЗХ УСТН 9 ВЛЕпоступательные пары И ВХОДЯЩИЕ ВО вращательные пары с водилом 19 кривошипа 20. Кривошип 20. выполняющий роль эксцентрика, жестко закреплен на валу 10 и размещен в открытой цилиндрической камере Д корпуса 1. Для изменения величины эксцентриситета е кривошип снабжен регулировочным механизмом 21. например винтовым. Для фиксирования устройства относительно оси вала кривошипа 10 устройство снабжено стопором 22.кривошип 20. вап кривошипа 10 составляют два кулисных механизма. соответственно первый и второй, Таким образом. механизм устройства состоит из двух кулисно-параллелограммных механизмов. установленных на общей вращательной паре.Па раллелограммн ые механизмы служат для преобразования вращательного движения кривошипа 20 в поступательные по двум взаимно перпендикулярным направлениям.кулисные механизмы выполняют функцию приводных соответствующих параллелограммных механизмов.Устройство работает следующим образом.Посредством патрона П устройство усТЭНЗЕЛИВЗЕТСЯ на вертикальном шпинделе станка для обработки оптических деталей.При обработке осенесимметричньих поверхностей включается стопор 22. При обработке осесимметричных поверхностей стопор 22 выключается. а шкив 11 посредстовм клиноременной Передачи подключается к приводу станка. Непосредственно на ДЭННОМ устройстве регулировочным механизмом 21 устанавливается эксцентриситет е кривошипа 20. Поворотом диска 3 задается угол (р. положение которого фиксируется зажимом 14.Число оборотов шпинделя станка ил . число оборотов устройства ша число двойных ходов г. амплитуда двойных ходов (величина штриха Р. усилие Р на поводке В устанавливаются с помощью соответствующих органов управления станка.(блок деталей) 6 На обрабатываемую поверХНОСТЬ детали УПЭНЭВЛИВЭВТСЯ инструмент 7. Опусканием ивоводка 8 в сферическоегнездо 9 инструмента 7 и сообщением ему определенного усилия Р осуществляется си ловое замыкание контактирующих поверхностей инструмента и детали. На обрабатываемую поверхность детали подается абразивная суспензия.кривошип 211), получая вращение шт от шпинделя станка. вращает водило 19. поворачиваясь в отверстиях Ползунов 17 и 18. заставляет их двигаться поступательно вдоль пазов кулис К 1 и К 2 дисков 2 и 4,приводя их в движение. перпендикулярное осям кулис. движение дисков 2 и 4 происходит по опорным поверхностям А и Б соответственно корпуса 1 и диска 3.При этом от работы первого кулисного механизма движение получат все элементы устройства лежащие над опорным фланцем А корпуса 1.Элементы устройства, лежащие над опорным фланцем В диска 4, в т.ч. деталь Б. будут участвовать в сложном движении. т.к. получают аналогинног движение от работы второго кулисното механизма.Благодаря параллелограммным механизмам абсолютное движение любой точки М детали будет совершаться одновременно только по двум взаимно перпендикулярным направлениям а-аи б-б, параллельным осям ОХ и О поворотной системы координат ХОУ. жестко связанной с осью вращения вала кривошипа ВО.В результате сложения этих движений любые точки обрабатываемой поверхности детали Б будут двигаться с одинаковыми скоростями. совершая путь за полный оборот кривошипа по замкнутым криволинейным траекториям всизстеме координат ХОУ.Таким образом. вращательное движение вала кривошипа 10 с помощью двух куписно-параллетогратчмньцх механизмов будет преобразовано в колебательное движение любых тонах на обрабатываемой поверхности детальт по двум взаимно перпендикупярнытм направлениям.Величины проекций путей проходимых точками на обрабатываемой поверхности детали за один оборот вала кривошипа. на оси Ох и О и. сведсвательно вид траекто рии их движений будут зависеть от эксцентриситета е. угла фазаимного поворота параллелограммньтх механизмов и их конструктивных размеров.При р 90) траекторией будет замкнутая кривая. близкая к окружности с радиусом. равным е (фига).При 0 9 г 190- замкнутая криволинейная траектория. по форме напоминающая эллипс. с осями. длины которых равныПри уо 0 квазилинейная траектория длиной равной 26.При обработке осесимметричных поверхностей устройству сообщается допопт нительно вращательное движение вокруг оси 0-0 со скоростью шз.В результате сложения вращательного движения устройства со скоростью при вращательного движения вала кривошипа 10 со скоростью шт любые Точки м на обрабатываемой поверхности детали будут совершать путь По сложным циклоидальным траекториям в неподвижной системе координат ХОУ (фипб).При наличии возвратнотоступательного движения Поводка станка с числом двой ньгх ходов т и амплитудой Р. сообщаемого инструменту. относительное двитжение точек обрабатываемой поверхности детали будет происходить по сложным-т. практически не повторяющимся цикловым траекто риям. особенно при имеющем здесь место свободном вращении инструмента 7 относительно вертикальной оси сферического шарнира 9 со скоростью ш . зависящей от многих случайных технологических факторов (фит).Устройство для обработки оптических Деталей. содержащее корпус. привод с криаошипом регулируемой длины, кинематически связанным с держателем рабочего органа. о тл и ч а ю ще ес я тем. что. с целью расширения технологических возможностей путем обработки как осесимметричных. так и осенесимметричных поверхностей. кинематическая связь кривоШИПЭ С ДВРЖЭТЕЛВМ ВЫПОПНВНВ В ВИДЕ трех соосно смонтированных дисков. первый из которых расположен на корпусе и шарнирно связан с ним посредством двух паралпервом с возможностью относительного поворота и фиксации. а третий шарнирно связан с вторым дОУгой парой параллельных рьлчагов и предназначен для крепления держателя рабочего органа. при этом в первом и третьем дисках смонтированы кулисные глеханизьтьа. направляющие которых расположены симметрично относительно шарниров соответствующей пары рычагов. ползуны связаны с водилом. размещенным по оси дисков И закрепленным на кривошиПе а корпус установлен с возможностьювращения относительно привода кривошипа.
МПК / Метки
МПК: B24B 13/06
Метки: обработки, деталей, устройство, оптических
Код ссылки
<a href="https://by.patents.su/7-414-ustrojjstvo-dlya-obrabotki-opticheskih-detalejj.html" rel="bookmark" title="База патентов Беларуси">Устройство для обработки оптических деталей</a>
Способ изготовления оптических деталей
Номер патента: 443
Опубликовано: 30.03.1995
Авторы: Катюк А. В., Якимахо А. П., Мастюгин Л. И.
МПК: B24B 13/00, B24B 1/00
Метки: способ, оптических, изготовления, деталей
Текст:
...инструмент на эпоксидной связке.зону обработки подают смазочио-охлаж ающую жидкость (СОЖ) при 153 ОС,прилагают давление, приводят в деиствие кинематическую часть станка и осуществляЮТ ПРОЦЕСС ШЛНфОВаНИЯ. ПОСЛЕ СНЯТИЯ ОСновной части припуска детали, не останавливая станка, вместо СОЖ при 1530 С подают СОЖ, нагретую до 4511 ОС. Инструмент разогревается, абразивные зерна вдавливаются в связку и продолжается процесс шлифования с меньшим...
Способ обработки длинномерной цилиндрической детали
Номер патента: 457
Опубликовано: 30.03.1995
Авторы: Мастюгин Л. И., Минец В. В., Рута С. А.
МПК: B24B 37/02
Метки: детали, цилиндрической, способ, обработки, длинномерной
Текст:
...инструмента к обрабатываемой поверхности вРезУлътате чего при обработке деталей, диаметр которых В процессе обработки умепъ- . шается инструмент находится В КОН такте со значительной поверхностью обрабатываемой детали. В таком инструменте п работе участвует большее количество абразивных аерен.что повышает ело производительность. ПРИ наличии л дбрапипосодсржчпем слоеканавки Шириной не менее 0,1 диаметра Обрабатываемой детали,...
Устройство для обработки и освоения скважин
Номер патента: 83
Опубликовано: 30.09.1994
Авторы: Демяненко Н. А., Лерман А. С., Санников В. А.
МПК: E21B 43/25
Метки: скважин, освоения, обработки, устройство
Текст:
...устройства на посадоч ное кольцо 16 распакеровываются (пакер на рис. не показан). и на устье создают избы точное давление. Поток жидкости из камерыляется в петрепускной канал джидкость. заполнявшая камеру низкого давления 4. устрегиляется вместе с потоком в перепускной канал 2. и в камере низкого давления 4 создается разрежение. В результате начнется движение жидкостичерез канал 6 из. зоны продуктивного объекта в камеру низ кого давления....
Станок для электроэрозионной обработки
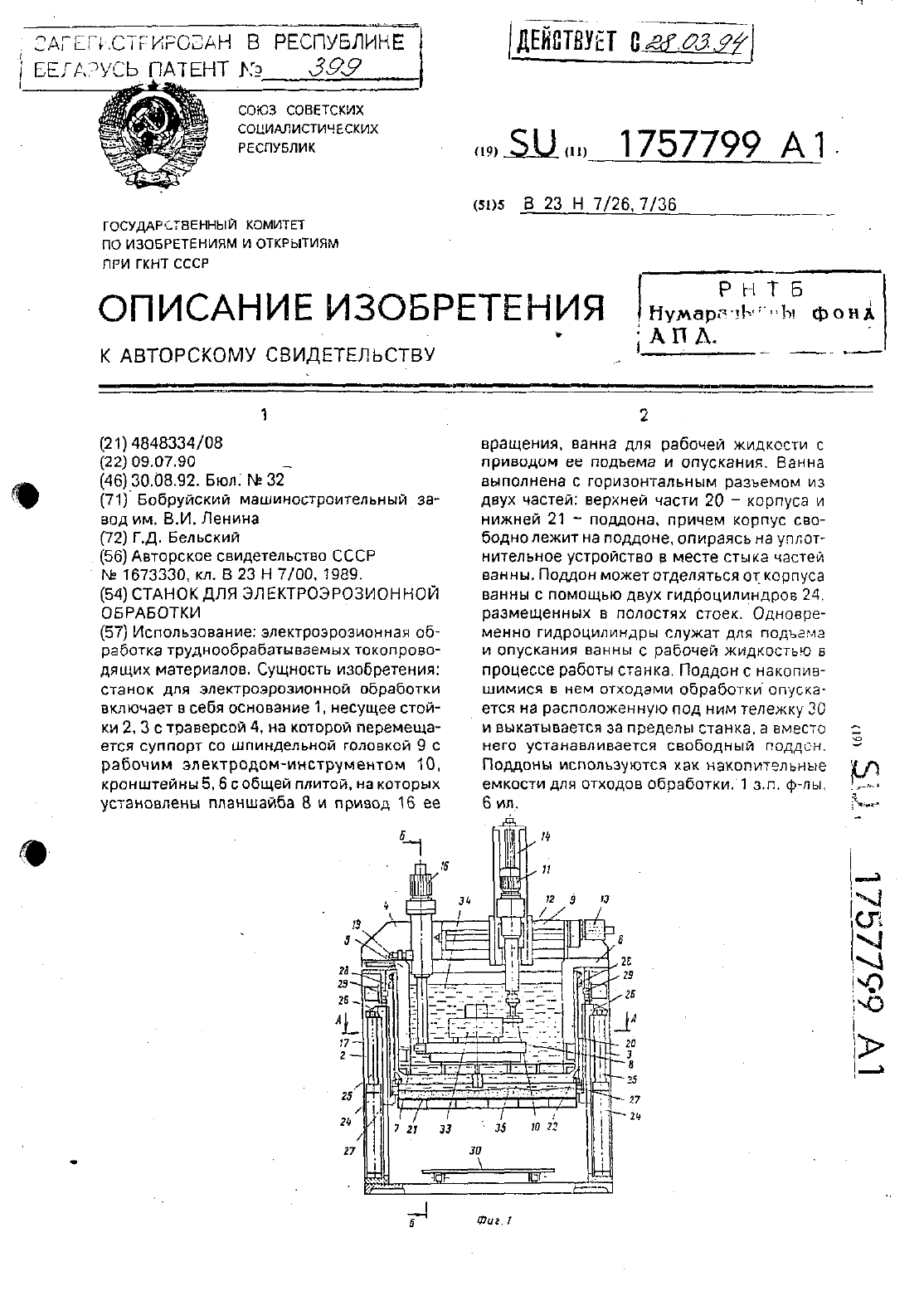
Номер патента: 399
Опубликовано: 30.03.1995
Автор: Бельский Георгий Дмитриевич
Метки: станок, электроэрозионной, обработки
Текст:
...крутящим моментом, что значительно расширяет технологические возможности станка и позволяетПОЛНОСТЬЮ ОТКЭЗЭТЬСЯ ОТ СЛОЖНЫХ МВХЭННческих коробок скоростей с множеством зубчатых передач. электромагнитных ъуфтПрименение автоматизированного регулируемого привода позволяет автоматизировать раГоту станка, используя систему ЧИСЛОБОГО ПВОГрЭММНОГО управления.Работает станок для электроэрозионной обработки следующим образом.ванне на планшайбе 8...
Способ обработки цилиндрических поверхностей сквозных отверстий
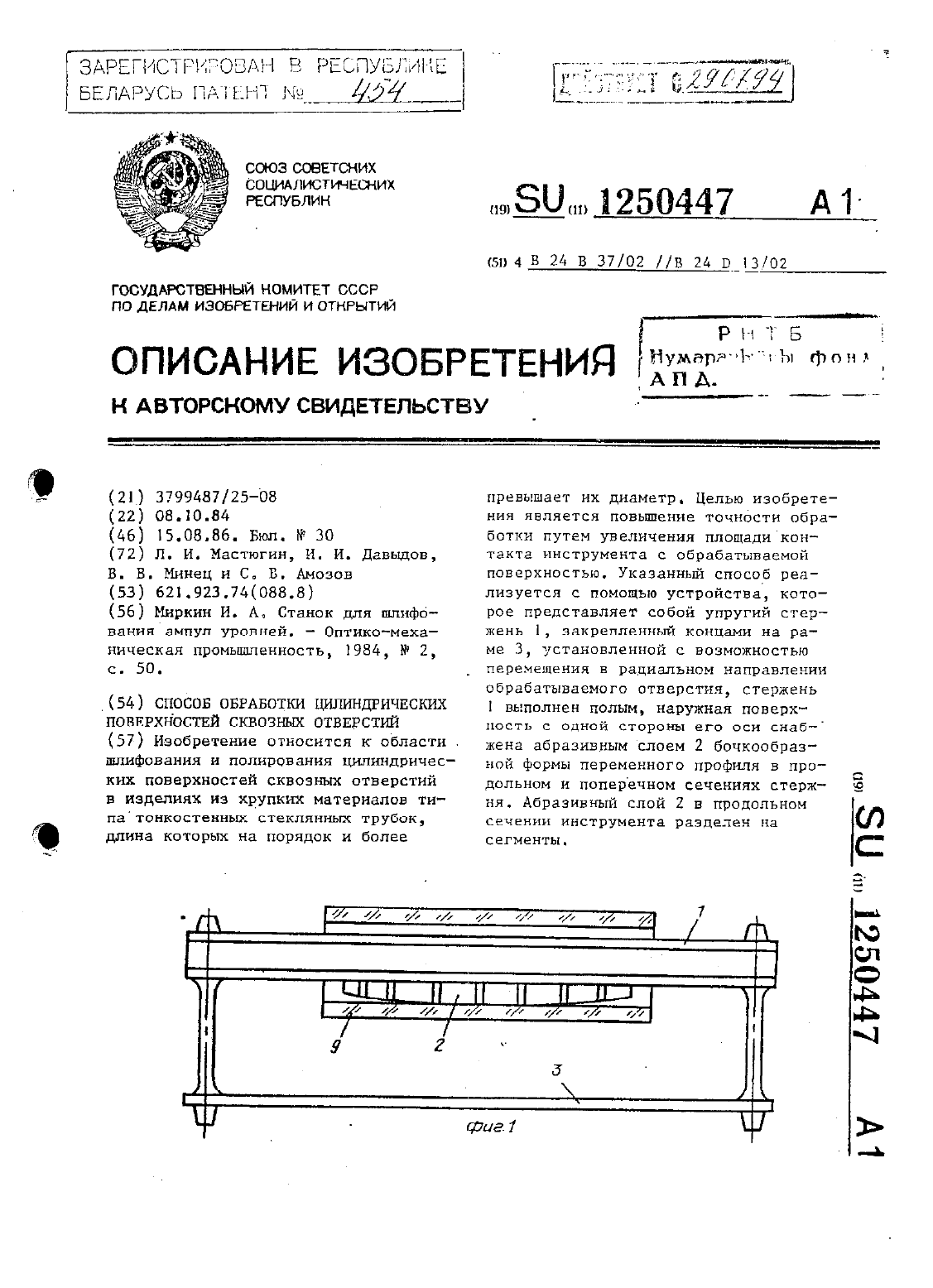
Номер патента: 454
Опубликовано: 30.03.1995
Авторы: Давыдов И. И., Амозов С. В., Мастюгин Л. И., Минец В. В.
МПК: B24B 37/02, B24D 13/02
Метки: обработки, поверхностей, цилиндрических, сквозных, способ, отверстий
Текст:
...отверстия. Абразивный слой 2 в продольном сечении разделен на сегменты 7 путем нарезания канавок 8.Обработку цилиндрических поверхностей сквозных отверстии осуществляют следующим образом.Вначале к работа готовят сам инструмент. Для этого абразивному слою 2 придают бочкообразную форму переменного профиля в продольном и поперечном сечениях согласно указанны выше выражений с таким условием, чтобы максимальная толщина абразивного слоя...
Предыдущий патент: Способ уборки сельскохозяйственных растений на корню и устройство для его осуществления
Следующий патент: Рабочий стол профилегибочного стана и способ настройки инструмента на рабочем столе профилегибочного стана
Случайный патент: Забивная свая