Самобалансирующийся вертикальный роторный механизм с газостатическим опорным узлом
Номер патента: 10078
Опубликовано: 30.12.2007
Авторы: Бородавко Владимир Иванович, Артамонов Владимир Александрович, Козин Александр Юрьевич, Кричко Константин Александрович, Воробьёв Владимир Васильевич, Бороха Эдуард Леонидович, Лускин Григорий Михайлович
Текст
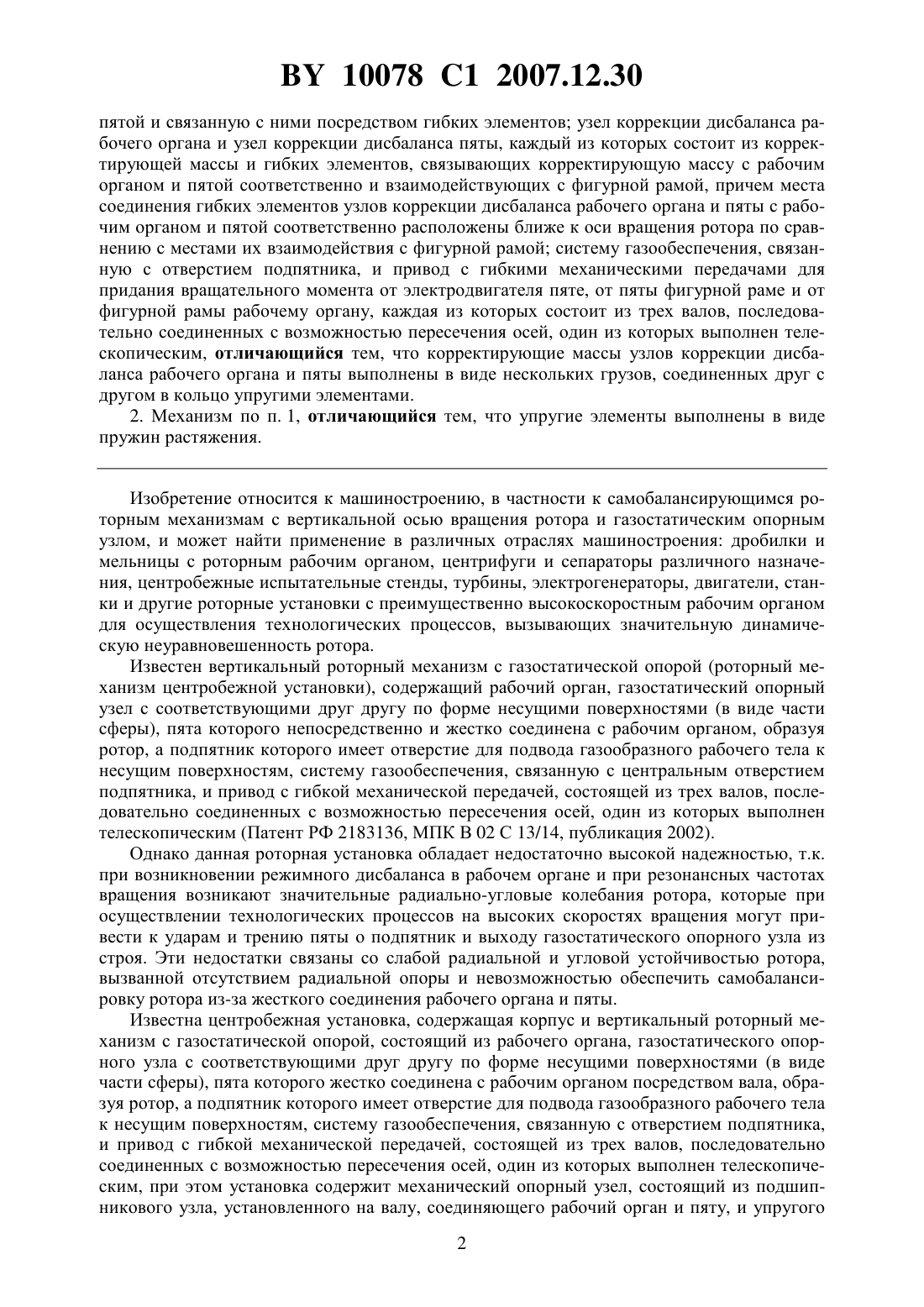
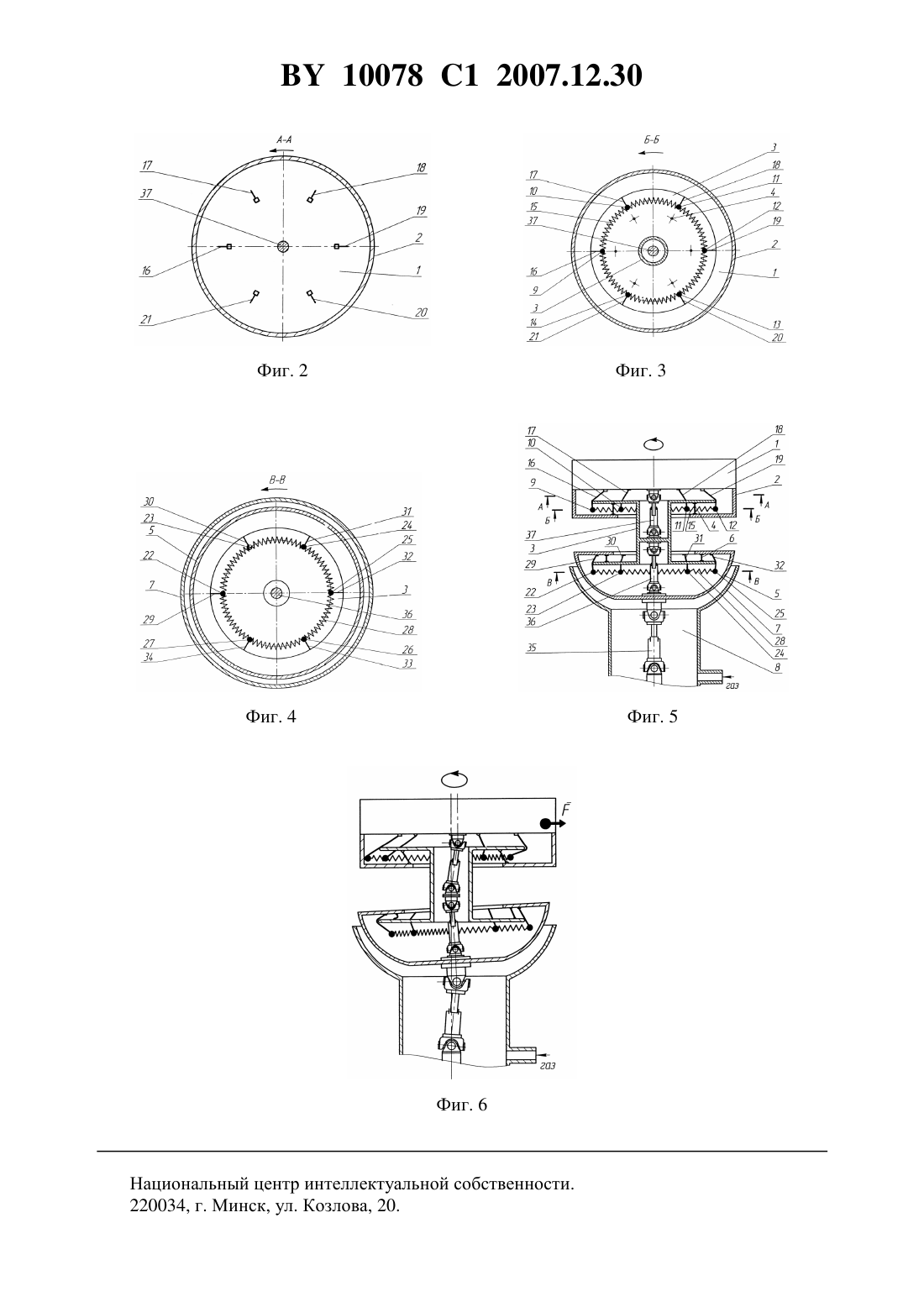
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ САМОБАЛАНСИРУЮЩИЙСЯ ВЕРТИКАЛЬНЫЙ РОТОРНЫЙ МЕХАНИЗМ С ГАЗОСТАТИЧЕСКИМ ОПОРНЫМ УЗЛОМ(71) Заявитель Научно-производственное республиканское унитарное предприятие НПО Центр(72) Авторы Артамонов Владимир АлександровичБородавко Владимир ИвановичБороха Эдуард ЛеонидовичВоробьв Владимир ВасильевичКозин Александр ЮрьевичКричко Константин АлександровичЛускин Григорий Михайлович(73) Патентообладатель Научно-производственное республиканское унитарное предприятие НПО Центр(57) 1. Самобалансирующийся вертикальный роторный механизм с газостатическим опорным узлом, содержащий рабочий орган газостатический опорный узел с соответствующими друг другу по форме несущими поверхностями, пята которого и рабочий орган образуют ротор, а подпятник которого имеет отверстие для подвода газообразного рабочего тела к несущим поверхностям фигурную раму, расположенную между рабочим органом и 10078 1 2007.12.30 пятой и связанную с ними посредством гибких элементов узел коррекции дисбаланса рабочего органа и узел коррекции дисбаланса пяты, каждый из которых состоит из корректирующей массы и гибких элементов, связывающих корректирующую массу с рабочим органом и пятой соответственно и взаимодействующих с фигурной рамой, причем места соединения гибких элементов узлов коррекции дисбаланса рабочего органа и пяты с рабочим органом и пятой соответственно расположены ближе к оси вращения ротора по сравнению с местами их взаимодействия с фигурной рамой систему газообеспечения, связанную с отверстием подпятника, и привод с гибкими механическими передачами для придания вращательного момента от электродвигателя пяте, от пяты фигурной раме и от фигурной рамы рабочему органу, каждая из которых состоит из трех валов, последовательно соединенных с возможностью пересечения осей, один из которых выполнен телескопическим, отличающийся тем, что корректирующие массы узлов коррекции дисбаланса рабочего органа и пяты выполнены в виде нескольких грузов, соединенных друг с другом в кольцо упругими элементами. 2. Механизм по п. 1, отличающийся тем, что упругие элементы выполнены в виде пружин растяжения. Изобретение относится к машиностроению, в частности к самобалансирующимся роторным механизмам с вертикальной осью вращения ротора и газостатическим опорным узлом, и может найти применение в различных отраслях машиностроения дробилки и мельницы с роторным рабочим органом, центрифуги и сепараторы различного назначения, центробежные испытательные стенды, турбины, электрогенераторы, двигатели, станки и другие роторные установки с преимущественно высокоскоростным рабочим органом для осуществления технологических процессов, вызывающих значительную динамическую неуравновешенность ротора. Известен вертикальный роторный механизм с газостатической опорой (роторный механизм центробежной установки), содержащий рабочий орган, газостатический опорный узел с соответствующими друг другу по форме несущими поверхностями (в виде части сферы), пята которого непосредственно и жестко соединена с рабочим органом, образуя ротор, а подпятник которого имеет отверстие для подвода газообразного рабочего тела к несущим поверхностям, систему газообеспечения, связанную с центральным отверстием подпятника, и привод с гибкой механической передачей, состоящей из трех валов, последовательно соединенных с возможностью пересечения осей, один из которых выполнен телескопическим (Патент РФ 2183136, МПК В 02 С 13/14, публикация 2002). Однако данная роторная установка обладает недостаточно высокой надежностью, т.к. при возникновении режимного дисбаланса в рабочем органе и при резонансных частотах вращения возникают значительные радиально-угловые колебания ротора, которые при осуществлении технологических процессов на высоких скоростях вращения могут привести к ударам и трению пяты о подпятник и выходу газостатического опорного узла из строя. Эти недостатки связаны со слабой радиальной и угловой устойчивостью ротора,вызванной отсутствием радиальной опоры и невозможностью обеспечить самобалансировку ротора из-за жесткого соединения рабочего органа и пяты. Известна центробежная установка, содержащая корпус и вертикальный роторный механизм с газостатической опорой, состоящий из рабочего органа, газостатического опорного узла с соответствующими друг другу по форме несущими поверхностями (в виде части сферы), пята которого жестко соединена с рабочим органом посредством вала, образуя ротор, а подпятник которого имеет отверстие для подвода газообразного рабочего тела к несущим поверхностям, систему газообеспечения, связанную с отверстием подпятника,и привод с гибкой механической передачей, состоящей из трех валов, последовательно соединенных с возможностью пересечения осей, один из которых выполнен телескопическим, при этом установка содержит механический опорный узел, состоящий из подшипникового узла, установленного на валу, соединяющего рабочий орган и пяту, и упругого 2 10078 1 2007.12.30 опорного узла, соединяющего подшипниковый узел и корпус (Патент РФ 2220782, МПК В 04 В 9/04, 2004). Однако, данная роторная установка обладает недостаточно высокой надежностью работы, т.к. при режимном дисбалансе рабочего органа и резонансных частотах вращения возникает неуравновешенность ротора, обуславливающая высокоамплитудные колебания ротора и соответственно высокие переменные динамические нагрузки в радиальном и угловом направлениях на подшипниковый узел и упругий опорный узел и их достаточно быстрый выход из строя. Эти недостатки связаны с тем, что из-за жесткого соединения рабочего органа и пяты невозможно обеспечить достижение технического результата, заключающегося в обеспечении самобалансировки рабочего органа и пяты независимо друг от друга и этим предотвратить радиальные и угловые колебания ротора. Известен также самобалансирующийся вертикальный роторный механизм с газостатической опорой, содержащий рабочий орган, газостатический опорный узел с соответствующими друг другу по форме несущими поверхностями, пята которого и рабочий орган образуют ротор, а подпятник которого имеет отверстие для подвода газообразного рабочего тела к несущим поверхностям, фигурную раму, расположенную между рабочим органом и пятой и связанную с ними посредством гибких элементов, узел коррекции дисбаланса рабочего органа и узел коррекции дисбаланса пяты, каждый из которых состоит из корректирующей массы и гибких элементов, связывающих корректирующую массу с рабочим органом и пятой соответственно и взаимодействующих с фигурной рамой, причем места соединения гибких элементов узлов коррекции дисбаланса рабочего органа и пяты с рабочим органом и пятой соответственно расположены ближе к оси вращения ротора по сравнению с местами их взаимодействия с фигурным основанием, систему газообеспечения, связанную с отверстием подпятника, и привод с гибкими механическими передачами для придания вращательного момента от электродвигателя пяте, от пяты фигурной раме и от фигурной рамы рабочему органу, каждая из которых состоит из трех валов, последовательно соединенных с возможностью пересечения осей, один из которых выполнен телескопическим, при этом корректирующая масса узлов коррекции дисбаланса рабочего органа и пяты выполнена в виде жесткого кольца (Патент РФ 2259239, МПК В 04 В 9/12,2005). Однако в известном механизме из-за выполнения корректирующей массы в виде жесткого кольца корректирующая масса смещается на такое же расстояние, что и рабочий орган и пята соответственно, что не позволяет добиться высокой эффективности самобалансировки рабочего органа и пяты. Задача изобретения состоит в повышении эффективности самобалансировки рабочего органа и пяты за счет обеспечения смещения части корректирующей массы, расположенной на стороне, противоположной вектору дисбаланса рабочего органа и пяты, на большее расстояние, чем расстояние, на которое смещаются рабочий орган и пята соответственно. Сущность изобретения заключается в том, что для решения поставленной задачи путем достижения указанного технического результата самобалансирующийся вертикальный роторный механизм с газостатическим опорным узлом, содержащий рабочий орган,газостатический опорный узел с соответствующими друг другу по форме несущими поверхностями, пята которого и рабочий орган образуют ротор, а подпятник которого имеет отверстие для подвода газообразного рабочего тела к несущим поверхностям, фигурную раму, расположенную между рабочим органом и пятой и связанную с ними посредством гибких элементов, узел коррекции дисбаланса рабочего органа и узел коррекции дисбаланса пяты, каждый из которых состоит из корректирующей массы и гибких элементов,связывающих корректирующую массу с рабочим органом и пятой соответственно и взаимодействующих с фигурной рамой, причем места соединения гибких элементов узлов коррекции дисбаланса рабочего органа и пяты с рабочим органом и пятой соответственно расположены ближе к оси вращения ротора по сравнению с местами их соединения с фигурной рамой, систему газообеспечения, связанную с отверстием подпятника, и привод с 3 10078 1 2007.12.30 гибкими механическими передачами для придания вращательного момента от электродвигателя пяте, от пяты фигурной раме и от фигурной рамы рабочему органу, каждая из которых состоит из трех валов, последовательно соединенных с возможностью пересечения осей, один из которых выполнен телескопическим, отличается тем, что корректирующая масса узлов коррекции дисбаланса рабочего органа и пяты выполнена в виде нескольких грузов, соединенных друг с другом в кольцо упругими элементами, например цилиндрическими пружинами. Изобретение поясняется чертежами фиг. 1 - общий вид механизма в разрезе фиг. 2 разрез А-А на фиг. 1 фиг. 3 - разрез Б-Б на фиг. 1 фиг. 4 - разрез В-В на фиг. 1 фиг. 5 общий вид механизма в разрезе с рабочим органом и пятой, находящимися в состоянии дисбаланса. Самобалансирующийся вертикальный роторный механизм с газостатическим опорным узлом (фиг. 1) содержит рабочий орган 1, снабженный опорным элементом 2, фигурную раму 3, связанную с опорным элементом 2 рабочего органа 1 гибкими элементами 4,газостатический опорный узел с соответствующими друг другу по форме несущими поверхностями, например, в виде части сферы, пята 5 которого связана с фигурной рамой 3 гибкими элементами 6, а подпятник 7 которого имеет отверстие 8 для подвода газообразного рабочего тела к несущим поверхностям, систему газообеспечения (на чертежах не показана), связанную с отверстием 8 подпятника 7, узел коррекции дисбаланса рабочего органа 1 (фиг. 2 и фиг. 3), состоящий из корректирующей массы, выполненной в виде нескольких грузов 9, 10, 11, 12, 13, 14, соединенных друг с другом в кольцо упругими элементами 15 и связанных с рабочим органом 1 гибкими элементами 16, 17, 18, 19, 20, 21,взаимодействующими с фигурной рамой 3, узел коррекции дисбаланса пяты 5 (фиг. 4),состоящий из корректирующей массы, выполненной в виде нескольких грузов 22, 23, 24,25, 26, 27, соединенных друг с другом в кольцо упругими элементами 28 и связанных с пятой 5 гибкими элементами 29, 30, 31, 32, 33, 34, взаимодействующими с фигурной рамой 3, привод (на чертежах не показан) с гибкой механической передачей 35 для передачи вращательного момента от привода пяте 5, гибкую механическую передачу 36 для передачи вращательного момента от пяты 5 фигурной раме 3 и гибкую механическую передачу 37 для передачи вращательного момента от фигурной рамы 3 рабочему органу 1. Гибкие элементы 4 и 6 могут быть выполнены в виде тросов или цепей. Упругие элементы 15 и 28 могут быть выполнены в виде цилиндрических пружин. Гибкие элементы 16, 17, 18, 19, 20, 21, 29, 30, 31, 32, 33, 34 могут быть выполнены, например, в виде тросов. При этом места их соединения с рабочим органом 1 и пятой 5 расположены ближе к оси вращения ротора по сравнению с местами их взаимодействия с фигурной рамой 3. Каждая из гибких механических передач 35, 36, 37 состоит из трех валов, последовательно соединенных с возможностью пересечения осей, один из которых выполнен телескопическим. Изобретение используют следующим образом. Включают систему газообеспечения, содержащую, например, вентилятор или компрессор, из которой газообразное рабочее тело через отверстие 8 подпятника 7 поступает к несущим поверхностям газостатического опорного узла. Между несущими поверхностями пяты 5 и подпятника 7 создается избыточное давление, под действием которого ротор (рабочий орган 1, фигурная рама 3 и пята 5) приподнимается (всплывает), образуя эксплуатационный зазор с газостатической опорной подушкой. Затем включают привод (электродвигатель) с гибкой механической передачей 35 и пяте 5 придают вращение с технологической скоростью. Посредством гибких механических передач 36 и 37 вращение с такой же скоростью придается фигурной опоре 3 и рабочему органу 1 соответственно. Посредством вращающегося рабочего органа 1 осуществляют различные центробежные и другие технологические процессы. В качестве рабочего органа 1 роторный механизм может содержать ускоритель материала ударно-центробежных дробилок и мельниц, рабочий 4 10078 1 2007.12.30 орган других роторных дробилок и мельниц, барабан центрифуг или сепараторов различного назначения, рабочий орган центробежных испытательных стендов и центробежных литейных машин, паровую или газовую турбину и другие роторные рабочие органы. Во время холостого вращения, при осуществлении технологического процесса и на резонансных частотах вращения в рабочем органе 1 (например ускорителе материала ударно-центробежной дробилки или мельницы) может проявиться остаточный или режимный дисбаланс (фиг. 5) вследствие возникновения динамической неуравновешенности. Под действием дисбаланса рабочий орган 1 будет смещаться в направлении вектора дисбаланса независимо от фигурной рамы 3 и пяты 5 благодаря тому, что связан с фигурной рамой 3 гибкими элементами 4 и приобретает вращение посредством гибкой механической передачи 37. Смещаясь, рабочий орган 1 освобождает гибкие элементы 18, 19, 20 и тянет за собой гибкие элементы 16, 17, 21. При этом грузы 9, 10, 14 смещаются в направлении, прямо противоположном направлению смещения рабочего органа 1 и в сторону от оси вращения. Их угловая скорость возрастает и соответственно возрастает центробежная сила, воздействующая на эти грузы. Грузы 18, 19, 20 смещаются в направлении, прямо противоположном направлению смещения рабочего органа 1, но к оси вращения. Их угловая скорость снижается и соответственно снижается центробежная сила, воздействующая на эти грузы. Благодаря тому что корректирующая масса выполнена из нескольких грузов, связанных упругими элементами, грузы 9, 10, 14 смещаются в сторону от оси вращения на большее расстояние, чем смещается дисбалансный рабочий орган 1. Таким образом корректирующая масса приобретает состояние дисбаланса, сила которого больше,чем сила дисбаланса рабочего органа 1, и с вектором, противоположным вектору дисбаланса рабочего органа 1. Это позволяет повысить эффективность самобалансировки рабочего органа 1, который перестает смещаться, когда сила дисбаланса грузов 9, 10, 14 сравняется с его силой дисбаланса. При устранении динамической неуравновешенности рабочий орган 1 под действием сил самоцентрирования (Ишлинский А.Ю. Прикладные задачи механики. Кн. 2. Механика упругих и абсолютно твердых тел. - М. Наука, 1986. - С. 123) сместится в исходное положение. При этом гибкие элементы 16, 17, 21 освобождаются, гибкие элементы 18, 19, 20 перемещаются за рабочим органом 1, а корректирующая масса перемещается в исходное положение и приобретает относительно оси вращения ротора состояние баланса. При возникновении дисбаланса в пяте 5 (фиг. 5). Благодаря тому что пята 5 связана с фигурной рамой 3 гибкими элементами 6, приобретает вращение посредством гибкой механической передачи 35 и передает вращательный момент фигурной раме 3 посредством гибкой механической передачи 36, она будет смещаться в направлении вектора дисбаланса независимо от фигурной рамы 3 и рабочего органа 1. При этом гибкие элементы 29, 30,34 освобождаются, гибкие элементы 31, 32, 33 перемещаются за пятой 5, грузы 22, 23, 27 перемещаются в направлении к оси вращения, а грузы 24, 25, 26 - от оси вращения в направлении, прямо противоположном направлению смещения пяты 5 (вектора дисбаланса),корректирующая масса приобретает относительно оси вращения ротора дисбаланс, вектор которого прямо противоположен вектору дисбаланса пяты 5, а сила дисбаланса превышает силу дисбаланса пяты 5. При устранении дисбаланса пята 5 под действием сил самоцентрирования (Ишлинский А.Ю. Прикладные задачи механики. Кн. 2. Механика упругих и абсолютно твердых тел. - М. Наука, 1986. - С. 123) будет смещаться в исходное положение. При этом гибкие элементы 31, 32, 33 освобождаются, гибкие элементы 29, 30, 34 перемещаются за пятой 5,а корректирующая масса смещается в исходное положение и приобретает относительно оси вращения состояние баланса. После завершения технологического процесса отключают привод, а после прекращения вращения ротора отключают систему газообеспечения и постепенно прекращают подачу газообразного рабочего тела к несущим поверхностям газостатического опорного узла. Пята 5 плавно опускается на подпятник 7. 5 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 6
МПК / Метки
МПК: B04B 9/00, F16F 15/30, B04B 3/00, F16C 32/00
Метки: вертикальный, опорным, роторный, механизм, узлом, газостатическим, самобалансирующийся
Код ссылки
<a href="https://by.patents.su/6-10078-samobalansiruyushhijjsya-vertikalnyjj-rotornyjj-mehanizm-s-gazostaticheskim-opornym-uzlom.html" rel="bookmark" title="База патентов Беларуси">Самобалансирующийся вертикальный роторный механизм с газостатическим опорным узлом</a>
Самобалансирующийся вертикальный роторный механизм с газостатической опорой
Номер патента: 8104
Опубликовано: 30.06.2006
Авторы: Козин Александр Юрьевич, Лускин Григорий Михайлович, Бородавко Владимир Иванович, Костевич Юрий Владимирович, Артамонов Владимир Александрович, Воробьев Владимир Васильевич, Бороха Эдуард Леонидович
Метки: роторный, опорой, газостатической, самобалансирующийся, механизм, вертикальный
Текст:
...корректирующую массу с рабочим органом и пятой, соответственно, и взаимодействующих с фигурной рамой, и гибкими механическими передачами для придания вращательного момента от пяты фигурной раме и от фигурной рамы рабочему органу, каждая из которых состоит из трех валов, последовательно соединенных с возможностью пересечения осей, один из которых выполнен телескопическим, причем места соединения гибких элементов узлов коррекции...
Центробежная установка с газостатическим опорным узлом
Номер патента: 7505
Опубликовано: 30.12.2005
Авторы: Бородавко Владимир Иванович, Бороха Эдуард Леонидович, Артамонов Владимир Александрович, Горобец Анатолий Викторович, Воробьев Владимир Васильевич, Иванов Евгений Николаевич, Козин Александр Юрьевич
МПК: B02C 13/14
Метки: газостатическим, центробежная, узлом, установка, опорным
Текст:
...отключении газостатического опорного узла. Сущность изобретения заключается в том, что для решения поставленной задачи центробежная установка с газостатическим опорным узлом, содержащая корпус, рабочий орган, газостатический вертикальный опорный узел с несущими поверхностями в виде части сферы, пята которого объединена с рабочим органом, образуя ротор, и имеет центр кривизны несущей поверхности выше центра масс ротора, а подпятник которого...
Вертикальная роторная установка с газостатическим опорным узлом
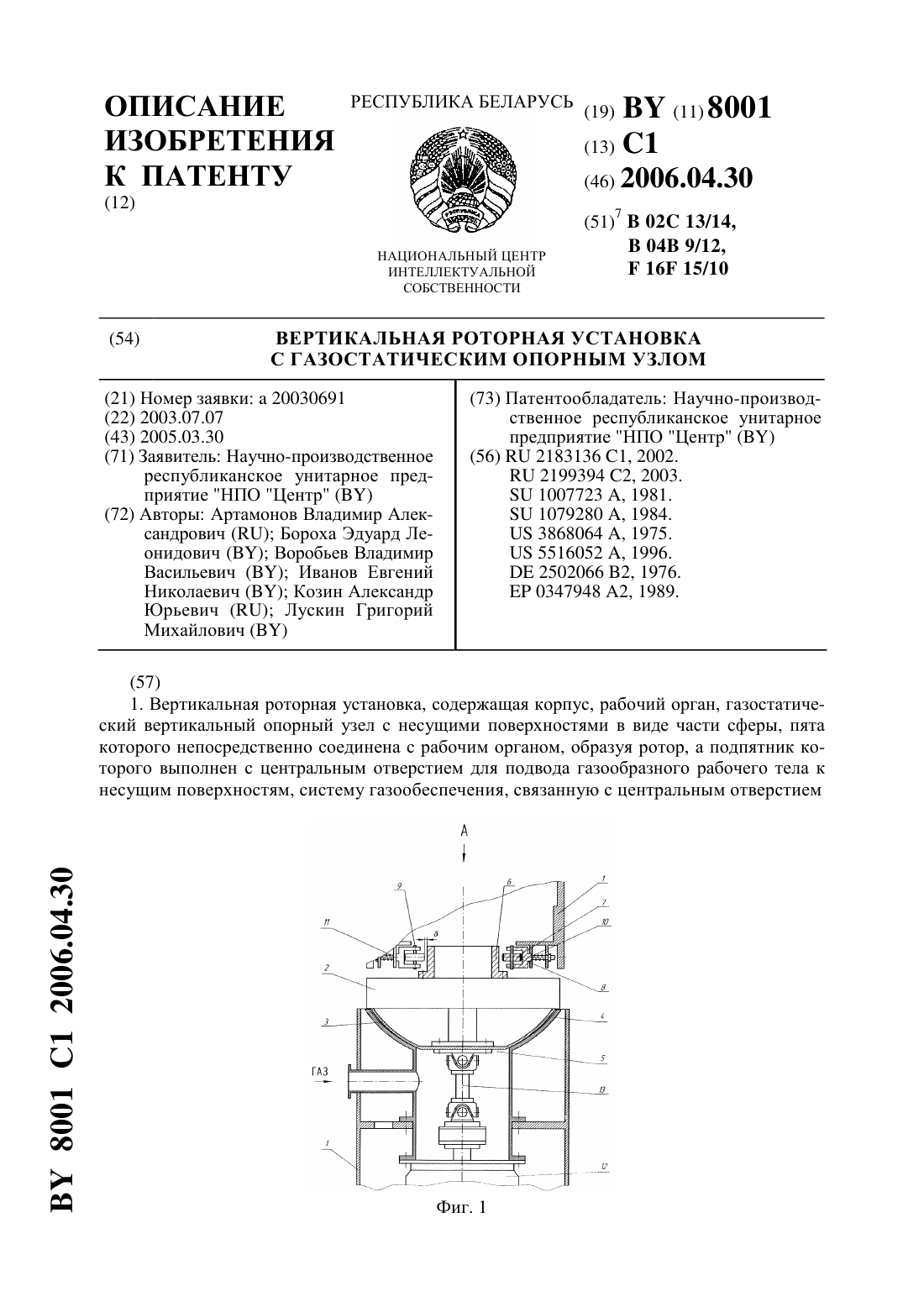
Номер патента: 8001
Опубликовано: 30.04.2006
Авторы: Бороха Эдуард Леонидович, Артамонов Владимир Александрович, Лускин Григорий Михайлович, Козин Александр Юрьевич, Иванов Евгений Николаевич, Воробьев Владимир Васильевич
МПК: B04B 9/12, F16F 15/10, B02C 13/14...
Метки: вертикальная, установка, роторная, газостатическим, опорным, узлом
Текст:
...связаны с низкой радиальной и угловой устойчивостью ротора, вызванной отсутствием упругого ограничения радиальных и угловых колебаний ротора. 2 8001 1 2006.04.30 Задача изобретения состоит в повышении надежности работы роторной установки путем предотвращения ударов и трения пяты о подпятник при возникновении неуравновешенности ротора за счет достижения технического результата, заключающегося в повышении радиальной и угловой устойчивости...
Вертикальный роторный механизм с самобалансирующимся рабочим органом
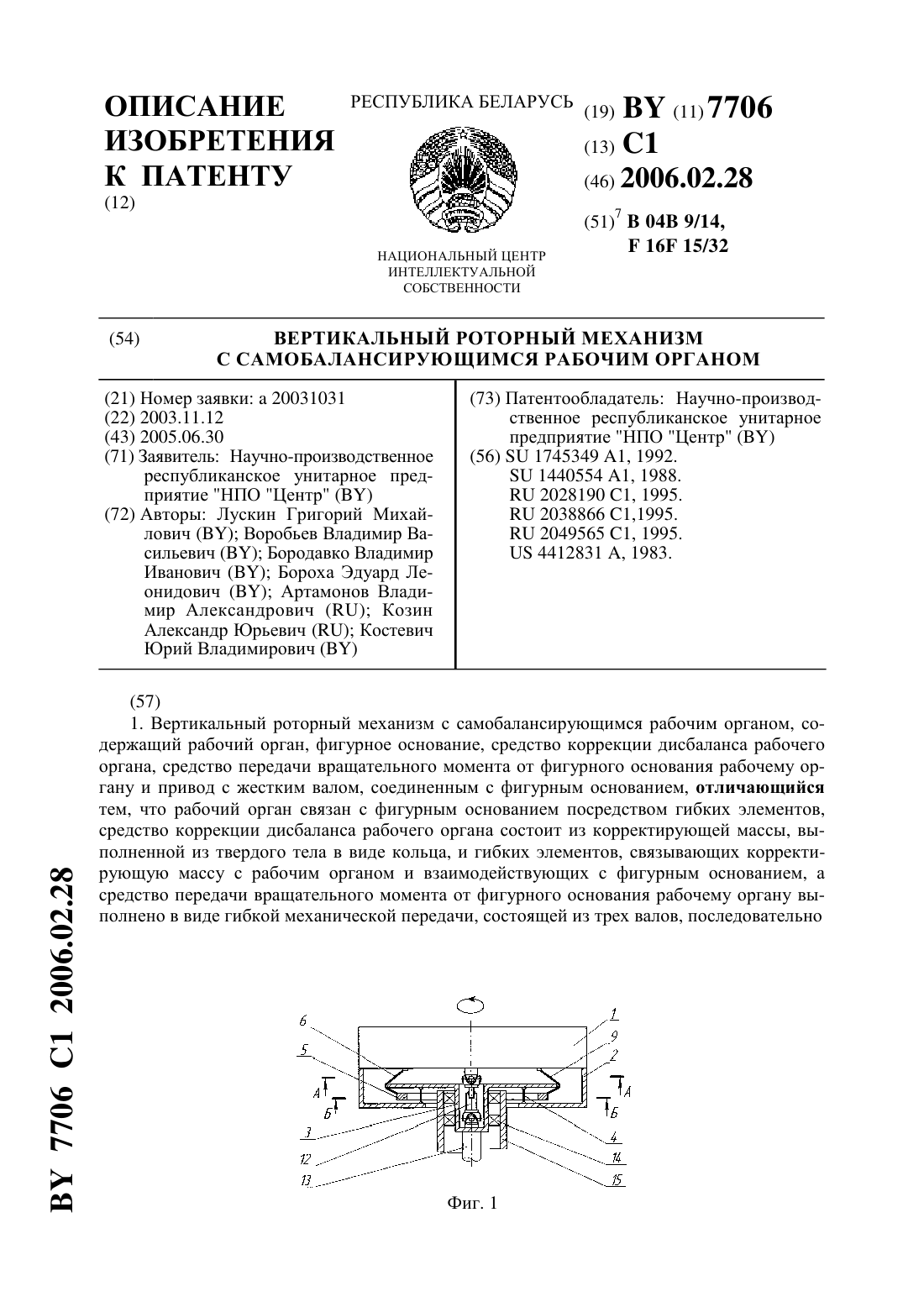
Номер патента: 7706
Опубликовано: 28.02.2006
Авторы: Артамонов Владимир Александрович, Воробьев Владимир Васильевич, Костевич Юрий Владимирович, Бороха Эдуард Леонидович, Козин Александр Юрьевич, Лускин Григорий Михайлович, Бородавко Владимир Иванович
МПК: B04B 9/14, F16F 15/32
Метки: органом, рабочим, механизм, самобалансирующимся, вертикальный, роторный
Текст:
...Более того, очевидно, что при возникновении дисбаланса корректирующая масса будет перемещаться в ту же сторону, что и рабочий орган, т.к. он жестко соединен с упругой обечайкой. Кроме этого, передача вращательного момента рабочему органу посредством упругих элементов является малоэффективной. Задача изобретения состоит в повышении эффективности самобалансировки рабочего органа за счет достижения технического эффекта, заключающегося в...
Роторный механизм центробежной установки

Номер патента: U 3112
Опубликовано: 30.10.2006
Автор: Баушев Константин Евгеньевич
МПК: B04B 7/08, B04B 9/12, B02C 13/14...
Метки: установки, роторный, центробежной, механизм
Текст:
...радиусы пяты и подпятника связаны условием( - ) /1/1,где- сферический радиус поверхности пяты, м- сферический радиус кольцевого пояса, м кроме того, сферический кольцевой пояс может быть выполнен из материала, твердость которого меньше, чем твердость материала пяты. На фиг. 1 схематически изображена конструкция центробежной установки, вертикальный разрез. На фиг. 2 изображен вертикальный разрез роторного механизма в части упорного сферического...
Предыдущий патент: Композиция для изготовления фрикционного материала
Следующий патент: Способ получения гидрохлорида 5-аминолевулиновой кислоты
Случайный патент: Кузов автомобиля