Амплитудный пеленгатор с последовательной обработкой сигналов
Номер патента: U 3843
Опубликовано: 30.08.2007
Авторы: Калитин Сергей Борисович, Морозов Владимир Михайлович, Лапука Олег Георгиевич
Текст
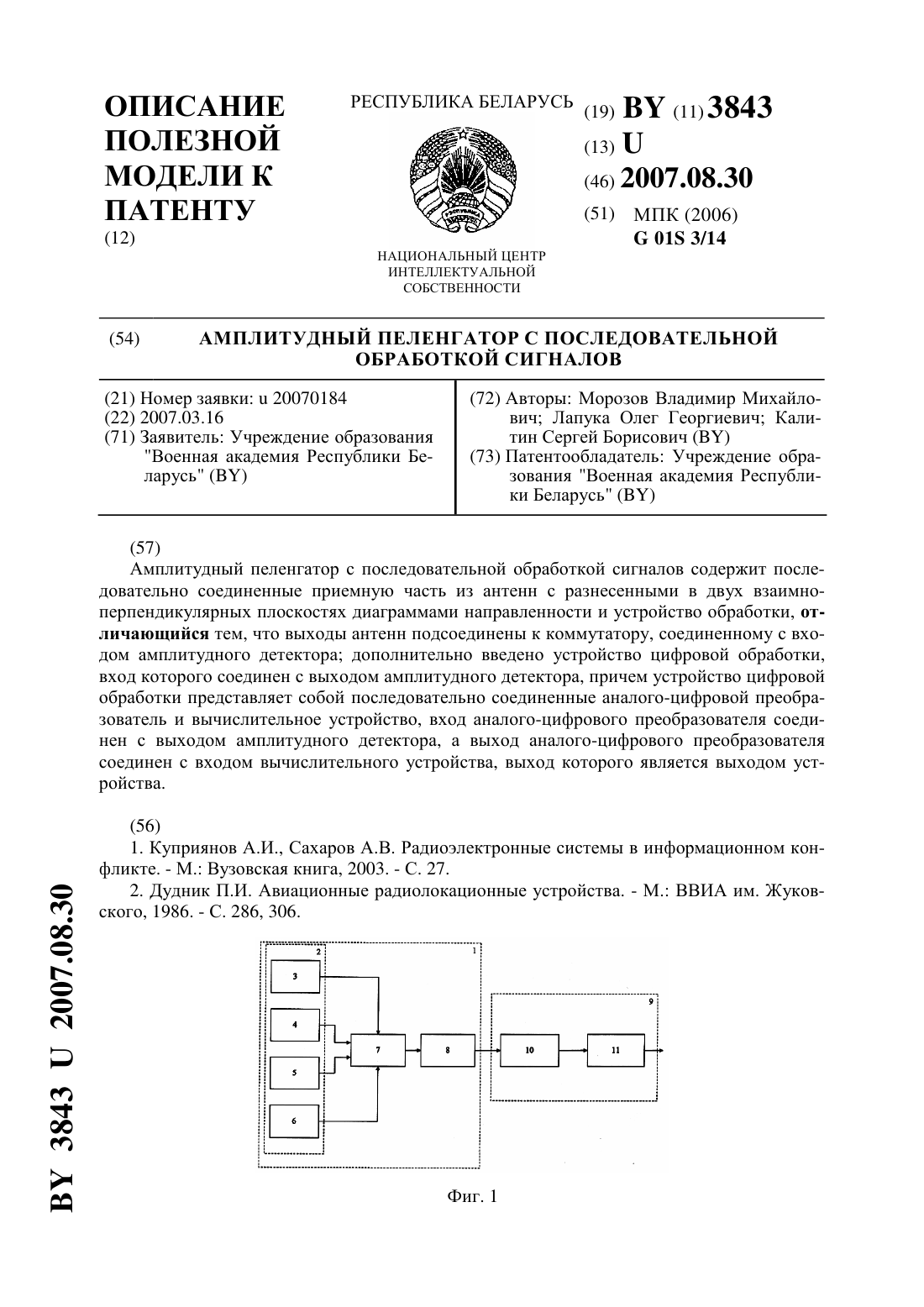
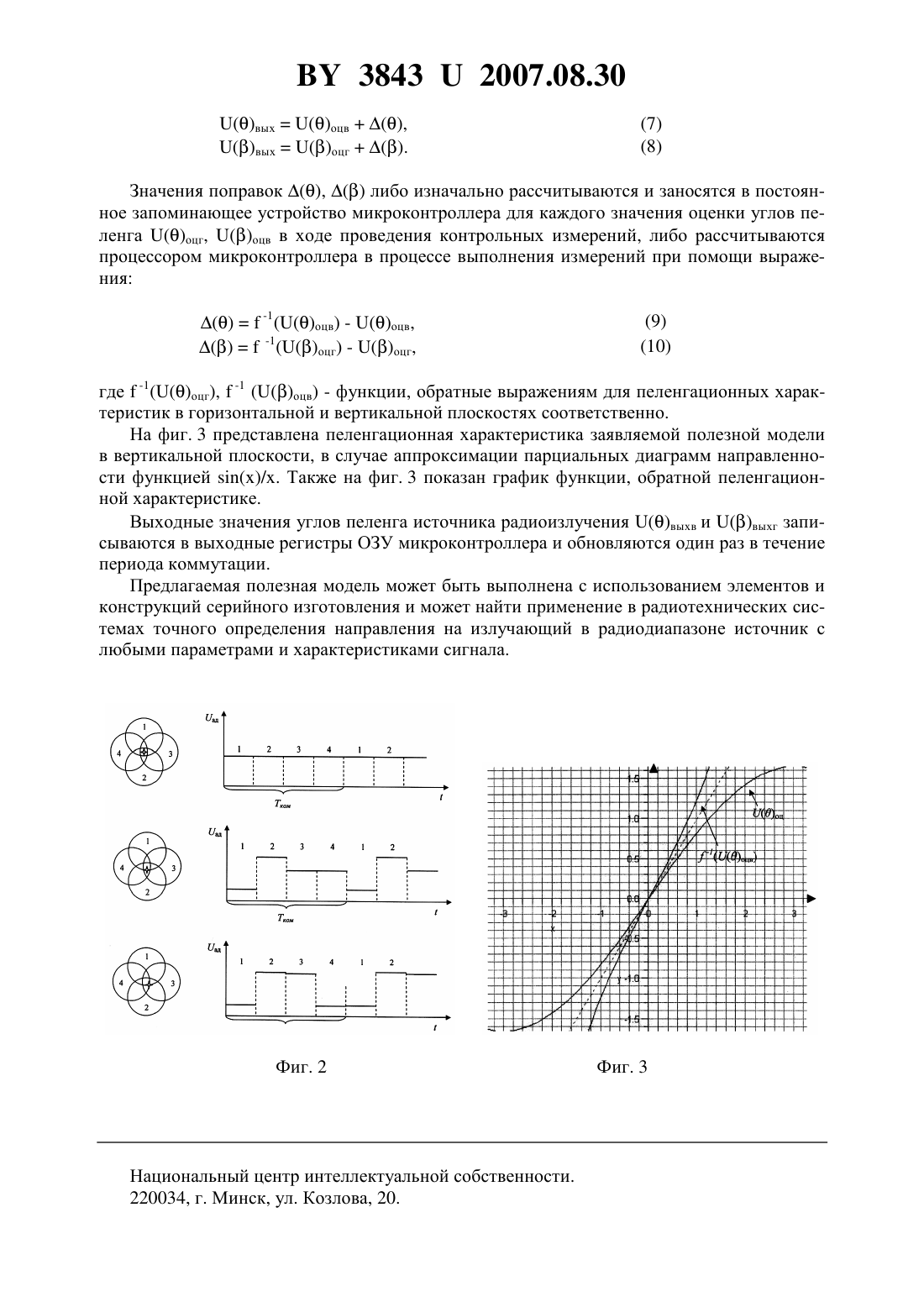
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Учреждение образования Военная академия Республики Беларусь(72) Авторы Морозов Владимир Михайлович Лапука Олег Георгиевич Калитин Сергей Борисович(73) Патентообладатель Учреждение образования Военная академия Республики Беларусь(57) Амплитудный пеленгатор с последовательной обработкой сигналов содержит последовательно соединенные приемную часть из антенн с разнесенными в двух взаимноперпендикулярных плоскостях диаграммами направленности и устройство обработки, отличающийся тем, что выходы антенн подсоединены к коммутатору, соединенному с входом амплитудного детектора дополнительно введено устройство цифровой обработки,вход которого соединен с выходом амплитудного детектора, причем устройство цифровой обработки представляет собой последовательно соединенные аналого-цифровой преобразователь и вычислительное устройство, вход аналого-цифрового преобразователя соединен с выходом амплитудного детектора, а выход аналого-цифрового преобразователя соединен с входом вычислительного устройства, выход которого является выходом устройства. 38432007.08.30 3. Патент 2108595, МПК 01 13/44, 1998. 4. Патент 2262120, МПК 01 3/16, 2005. 5. Патент 2134430, МПК 01 3/16, 1999. 6. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - М. Радио и связь,1984. - С. 196. Полезная модель относится к области радиолокации и радионавигации ( 01 ) и может быть использована для определения направления на источник радиоизлучения с неизвестными характеристиками и параметрами сигнала. Известны амплитудные пеленгаторы, в которых определение направления на источник излучения основано на совмещении максимума диаграммы направленности антенны пеленгатора с направлением на пеленгуемый источник 1. Недостатком таких устройств является низкая точность измерения угла пеленга вследствие малой крутизны пеленгационной характеристики в окрестностях нуля. Известны амплитудные пеленгаторы, в которых для определения направления на источник излучения используется коническое сканирование смещенной диаграммы направленности вокруг оси антенной системы 2. Недостатками таких пеленгаторов являются влияние амплитудных флюктуаций на точность измерений и достаточно большое время,необходимое для определения направления на источник (не менее периода вращения луча диаграммы направленности). Известны устройства, свободные от вышеназванных недостатков - моноимпульсные амплитудные пеленгаторы 2, однако недостатком таких устройств является влияние амплитудной и фазовой неидентичности приемных каналов на точность пеленгования. Такие устройства являются узкополосными и требуют фазировки и амплитудной калибровки приемных каналов при изменении частоты принимаемого сигнала. Известны моноимпульсные пеленгаторы, в которых для устранения неидентичности амплитудно-фазовых характеристик приемных каналов применяется уплотнение каналов. Для этих целей в известных пеленгаторах используются частотное уплотнение каналов - сигналы суммарного и разностного каналов с помощью гетеродинов переводятся на различные промежуточные частоты, объединяются в одном приемном канале и далее для обработки в угловом дискриминаторе разделяются по частоте с использованием тех же гетеродинов фазовое уплотнение каналов 3 - сигналы суммарного и разностного каналов кодируются по фазе, далее объединяются в одном приемном тракте и с помощью демодуляторов разделяются для дальнейшей суммарно-разностной обработки схемы коррекции амплитудно-фазовых характеристик одного канала относительно другого 4, 5. Общим недостатком известных решений является снижение точности пеленгования при неизвестных параметрах сигнала, а также при углах пеленга, превышающих линейный участок пеленгационной характеристики углового дискриминатора. Прототипом заявляемого устройства является моноимпульсный пеленгатор с последовательной коммутацией диаграмм направленности антенн 6. Устройство содержит четыре антенны, выходы которых соединены с входами соответствующих фазовращателей,вторые входы которых соединены с выходами устройства управления сумматор, входами которого являются выходы фазовращателей смеситель, первым входом которого является выход сумматора, а на второй поступает сигнал гетеродина, выходом смесителя является вход усилителя промежуточной частоты переключатель, первым входом которого является выход усилителя промежуточной частоты, а вторым входом является выход устройства управления два выхода переключателя (сигналы левой и правой диаграммы направленности) соединены со сравнивающим устройством, осуществляющим оценку угла азимута,2 38432007.08.30 два выхода переключателя (сигналы верхней и нижней диаграммы направленности) соединены со сравнивающим устройством, осуществляющим оценку угла места. Недостатком известного устройства является то, что на точность пеленгования могут оказывать влияние неидентичности каналов после переключателя в сравнивающем устройстве, где для выделения сигнала рассогласования необходимо применять аналоговую линию задержки для объединения сигналов диаграмм направленности, лежащих в одной плоскости. Кроме этого, известное устройство, как и перечисленные аналоги, не позволяет измерять угловые координаты источников радиоизлучений с неизвестными параметрами сигнала. Техническим результатом предлагаемого изобретения является возможность пеленгования с высокой точностью источников радиоизлучений с неизвестными характеристиками и параметрами сигнала. Технический результат достигается тем, что в заявляемом устройстве, содержащем последовательно соединенные приемную часть и устройство цифровой обработки, в приемной части с помощью коммутатора осуществляется коммутация четырех антенн, причем диаграммы направленности двух из них развернуты на некоторый угол в вертикальной плоскости, а диаграммы направленности оставшихся двух развернуты на такой же угол в горизонтальной плоскости. Выход соединен с входом амплитудного детектора, который выделяет амплитуду сигнала, далее поступающего на вход устройства цифровой обработки. Таким образом, осуществляется временное уплотнение приемных каналов и устранение неидентичности их амплитудно-фазовых характеристик. Частота коммутации обеспечивает переключение антенн не менее четырех раз в пределах длительности одного импульса электромагнитного излучения. Выход амплитудного детектора соединен с входом устройства цифровой обработки, причем устройство цифровой обработки представляет собой последовательно соединенные аналого-цифровой преобразователь и вычислительное устройство, в котором осуществляется цифровая суммарно-разностная обработка и оценка угла пеленга, а также вычисление коррекционной поправки, линеаризующей пеленгационную характеристику. Вход аналого-цифрового преобразователя соединен с выходом амплитудного детектора, а выход аналого-цифрового преобразователя соединен с входом вычислительного устройства. Выход устройства цифровой обработки является выходом устройства. В заявляемом устройстве высокая точность измерений в широком частотном диапазоне достигается использованием широкополосных антенных конструкций, цифровой коррекцией нелинейности пеленгационной характеристики, а также использованием единого тракта обработки сигналов антенн с разнесенными диаграммами направленности, чем исключается проблема амплитудной неидентичности каналов. На фиг. 1 приведена структурная схема заявляемой полезной модели. На фиг. 2 представлены эпюры, поясняющие принцип временного уплотнения каналов в заявляемой полезной модели. На фиг. 3 представлена пеленгационная характеристика полезной модели. Предлагаемое устройство пеленгации содержит приемную часть 1, причем приемная часть включает антенную систему 2, состоящую из четырех антенн 3, 4, 5 и 6 с разнесенными в двух взаимно-перпендикулярных плоскостях диаграммами направленности, выходы которых подсоединены к коммутатору 7, выход которого соединен с входом амплитудного детектора 8 устройство цифровой обработки 9, вход которого соединен с выходом амплитудного детектора, причем устройство цифровой обработки представляет собой последовательно соединенные аналого-цифровой преобразователь 10 и вычислительное устройство 11, вход аналого-цифрового преобразователя 10 соединен с выходом амплитудного детектора 8, а выход аналого-цифрового преобразователя соединен со входом вычислительного устройства 9, выход которого является выходом устройства. 3 38432007.08.30 Предлагаемое устройство работает следующим образом. Сигнал пеленгуемого радиоисточника поступает на четыре антенны 3, 4, 5, 6, причем антенны 3 и 4 используются для пеленгации в вертикальной плоскости, а 5 и 6 - в горизонтальной, для чего диаграммы направленности антенн 3 и 4 развернуты на некоторый угол в вертикальной плоскости, а антенн 5 и 6 - в горизонтальной. Коммутатор 7 в пределах длительности импульса сигнала осуществляет поочередное с одинаковой частотой подключение выходов антенн 3, 4, 5, 6 к входу амплитудного детектора 8, сигнал на выходе которого пропорционален амплитуде сигнала с выходов антенн. В случае, когда направление на источник излучения совпадает с осью антенной системы, амплитуда сигнала на выходе амплитудного детектора постоянна в течение всего периода коммутации. Изменение положения оси антенной системы относительно направления на источник излучения в какой-либо плоскости ведет к изменению амплитуд сигналов с выходов соответствующих антенн. На фиг. 2 показаны принцип ориентации диаграмм направленности и эпюры, поясняющие принцип временного уплотнения каналов в заявляемом устройстве. Продетектированный сигнал поступает на аналого-цифровой преобразователь 10. Аналого-цифровой преобразователь 10 преобразует сигнал, поступающий с выхода амплитудного детектора 8, в цифровой код для дальнейшей суммарно-разностной обработки в вычислительном устройстве 11. Сигнал на выходе вычислительного устройства, являющегося выходом заявляемого устройства, является оценкой углов пеленга источника радиоизлучений в цифровом виде в вертикальной и горизонтальной плоскостях. В качестве вычислительного устройства 11 может быть использован микроконтроллер. В этом случае процессор микроконтроллера выполняет подпрограмму вычисления сигнала оценки угла пеленга и подпрограмму вычисления коррекционной поправки один раз по истечении периода коммутации Тком антенн 3, 4, 5, 6. При этом оцифрованные амплитуды сигналов 1, 2, 3, 4 с выходов антенн поочередно записываются в четыре регистра оперативного запоминающего устройства (ОЗУ) микроконтроллера. По истечении периода коммутации в процессоре микроконтроллера выполняется расчет оценки угла пеленга в соответствии с выражениями где рв и св - разностный и суммарный сигнал двух антенн, осуществляющих пеленг в вертикальной плоскости,г и г - разностный и суммарный сигнал двух антенн, осуществляющих пеленг в горизонтальной плоскости,оцв и оцг - оценка угла пеленга в вертикальной и горизонтальной плоскостях,Кп - коэффициент нормировки пеленгационной характеристики, - истинное значение угла пеленга в вертикальной плоскости, - истинное значение угла пеленга в горизонтальной плоскости. Для повышения точности измерений в широких пределах изменения угла пеленга производится коррекция нелинейности пеленгационной характеристики при помощи поправки ,4 Значения поправок ,либо изначально рассчитываются и заносятся в постоянное запоминающее устройство микроконтроллера для каждого значения оценки углов пеленга оцг, оцв в ходе проведения контрольных измерений, либо рассчитываются процессором микроконтроллера в процессе выполнения измерений при помощи выражения где-1(оцг),-1 (оцв) - функции, обратные выражениям для пеленгационных характеристик в горизонтальной и вертикальной плоскостях соответственно. На фиг. 3 представлена пеленгационная характеристика заявляемой полезной модели в вертикальной плоскости, в случае аппроксимации парциальных диаграмм направленности функцией /. Также на фиг. 3 показан график функции, обратной пеленгационной характеристике. Выходные значения углов пеленга источника радиоизлучения выхв и выхг записываются в выходные регистры ОЗУ микроконтроллера и обновляются один раз в течение периода коммутации. Предлагаемая полезная модель может быть выполнена с использованием элементов и конструкций серийного изготовления и может найти применение в радиотехнических системах точного определения направления на излучающий в радиодиапазоне источник с любыми параметрами и характеристиками сигнала. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 5
МПК / Метки
МПК: G01S 3/14
Метки: последовательной, пеленгатор, амплитудный, обработкой, сигналов
Код ссылки
<a href="https://by.patents.su/5-u3843-amplitudnyjj-pelengator-s-posledovatelnojj-obrabotkojj-signalov.html" rel="bookmark" title="База патентов Беларуси">Амплитудный пеленгатор с последовательной обработкой сигналов</a>
Устройство для автоматического контроля приемников частотно-модулированных сигналов
Номер патента: 759
Опубликовано: 15.08.1995
Авторы: Удалов В. П., Винничек А. Н., Мисяк В. Е.
МПК: G01R 31/28
Метки: контроля, приемников, устройство, частотно-модулированных, сигналов, автоматического
Текст:
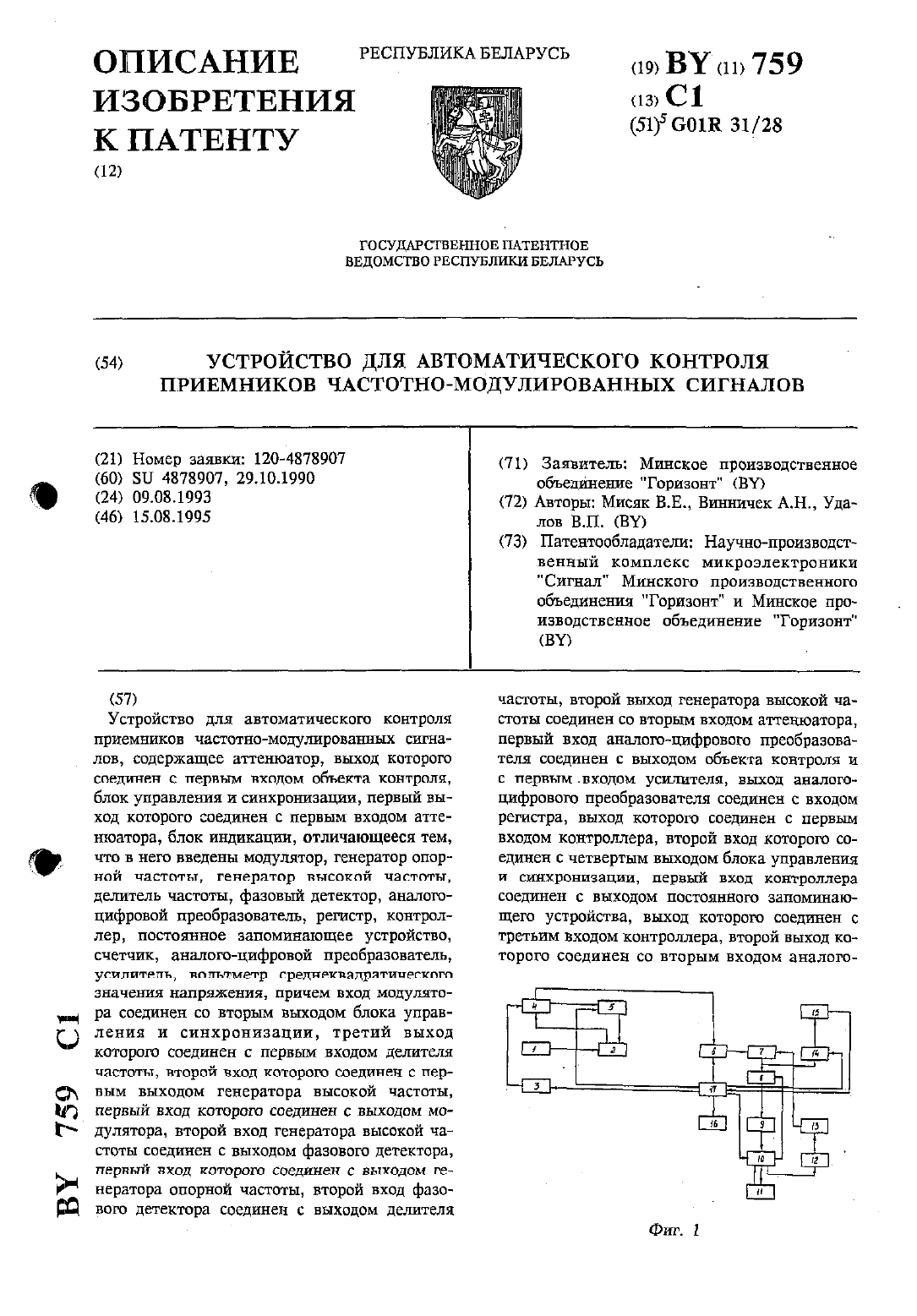
...собой кварцевый генератор. Для получения частотно-модулированного сигнала на вход регулирующего элемента ГВЧ 4 приходит синусоидальный сигнал с малыми нелинейными искажениями с модулятора 3. Изменение девиации частоты происходит по программе,заложенной в ПЗУ 22, по командам центрального процессора 23. Цифровой код, соответствующий требуемой девиации частоты,поступает на второй вход модулятора 3 через блок интерфейсов 24. Сшнал с выхода ГВЧ...
Детектор частотного-манипулированных сигналов (варианты)
Номер патента: 2578
Опубликовано: 30.12.1998
Авторы: Люборец Леонид Иванович, Силков Роман Романович
МПК: H04L 27/14, H03D 3/02
Метки: детектор, варианты, частотного-манипулированных, сигналов
Текст:
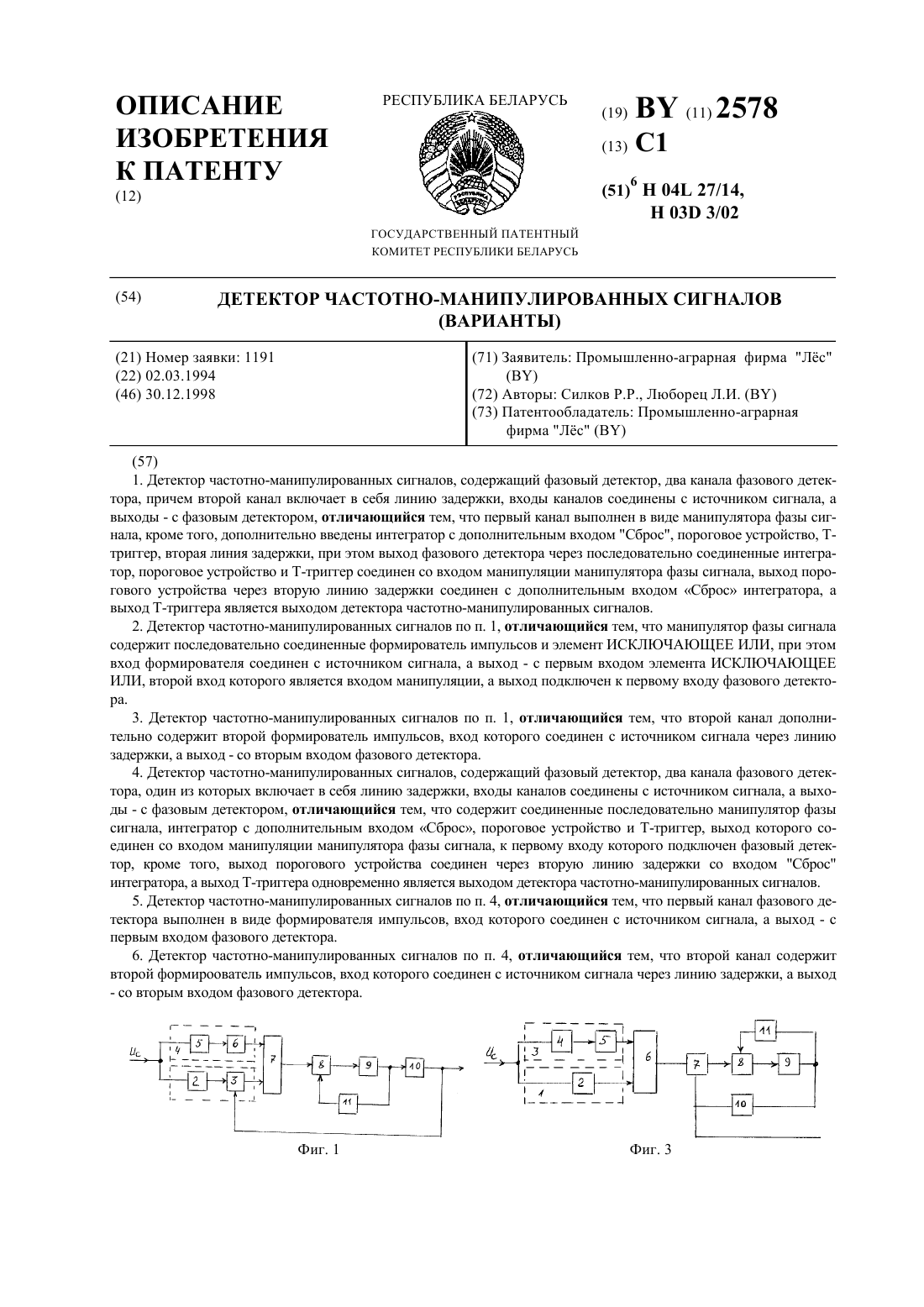
...детектора 7, интегратора с дополнительным входом Сброс 8, порогового устройства 9 Т-триггера 10, второй линии задержки . Следует отметить, что фазовый детектор 7 может быть выполнен в виде элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, интегратор 8 со входом Сброс может быть выполнен на основе операционного усилителя, где начальные условия (сброс) задаются управляемым ключом, либо путем закорачивания конденсатора, либо подключением конденсатора к источнику...
Импульсный перемножитель аналоговых сигналов
Номер патента: 4504
Опубликовано: 30.06.2002
Авторы: Муринов Игорь Викторович, Абаринов Евгений Георгиевич
МПК: G06G 7/161
Метки: сигналов, импульсный, перемножитель, аналоговых
Текст:
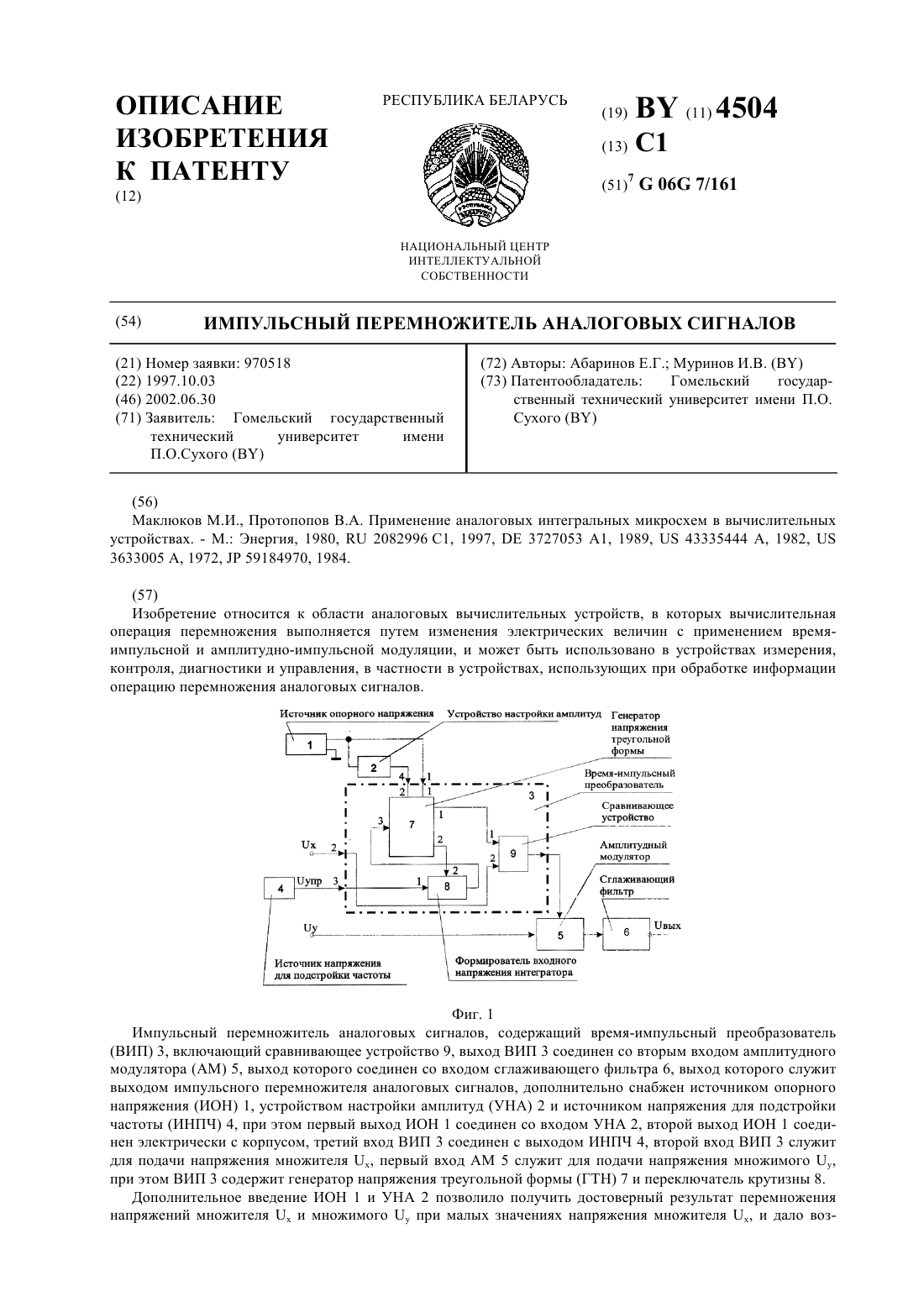
...треугольной формы 7, формирователь входного напряжения интегратора 8 и сравнивающее устройство 9, выход которого служит выходом время-импульсного преобразователя 3, четвертым входом которого служит второй вход генератора напряжения треугольной формы 7, первый вход которого служит первым входом времяимпульсного преобразователя 3 и соединен с первым выходом источника опорного напряжения 1, второй выход которого соединен электрически с...
Устройство для измерения параметров сигналов
Номер патента: 918
Опубликовано: 15.12.1995
Авторы: Дятко Леонид Федорович, Никитин Н. А., Вашкевич Олег Васильевич, Ломоносов Валерий Иванович, Жаденов Игорь Николаевич, Чаюк Николай Николаевич, Фанталис Феликс Исаакович, Лакотко Владимир Иванович
МПК: G01R 13/02
Метки: измерения, устройство, сигналов, параметров
Текст:
...первыии второи компараторы, объединенные первыми входам первыи ивторои элементы И. генератор тактовых импульсов. выход подключенныи к первым входам первого и второго элементов И. перв двоичныи счетчик и первыи триггер, единичным выходом соединены со вторым входом первого элемента И, выход которого соединенС счетным входом первого двоичного счетчика, введены адаптер контактирующим устроиствон для подключения проверяемого...
Электрооптический амплитудный модулятор
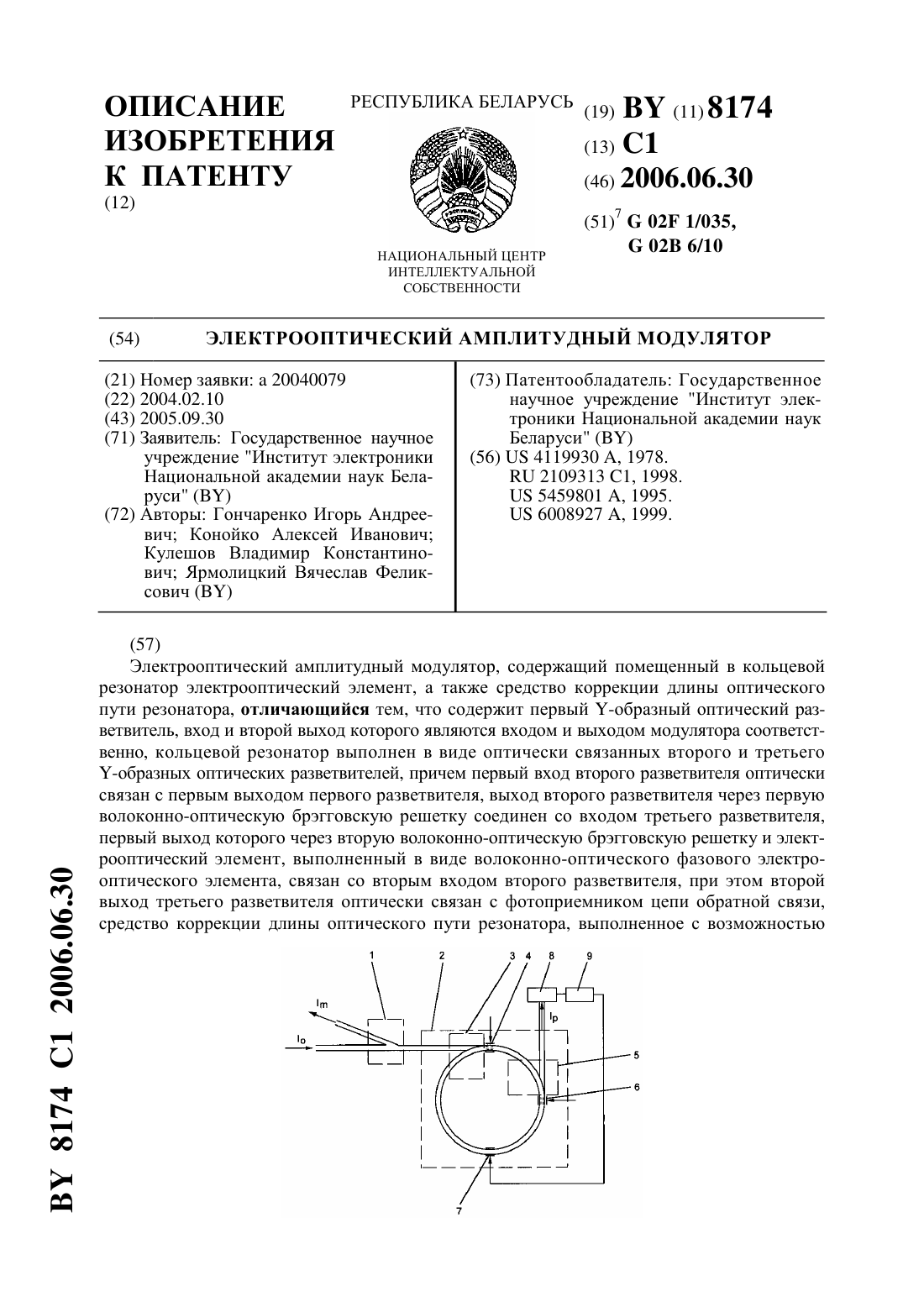
Номер патента: 8174
Опубликовано: 30.06.2006
Авторы: Конойко Алексей Иванович, Гончаренко Игорь Андреевич, Ярмолицкий Вячеслав Феликсович, Кулешов Владимир Константинович
МПК: G02B 6/10, G02F 1/035
Метки: амплитудный, модулятор, электрооптический
Текст:
...разветвителем 1, вход и второй выход которого являются, соответственно, входом и выходом электрооптического модулятора. Первый 1, второй 3 и третий 5 -образные разветвители выполнены в виде двух отрезков оптического волокна, имеющих оптический контакт 2. Первая 4 и вторая 6 волоконно-оптические брэгговские решетки выполнены в виде отрезков электрооптического волокна с брэгговскими решетками для различных длин волн в сердцевине и наружными...
Предыдущий патент: Устройство для диагностики вируса гепатита С
Следующий патент: Коммутационная панель
Случайный патент: Контактная тарелка для тепломассообменного аппарата