Нелинейный радиолокатор
Номер патента: U 3695
Опубликовано: 30.06.2007
Текст
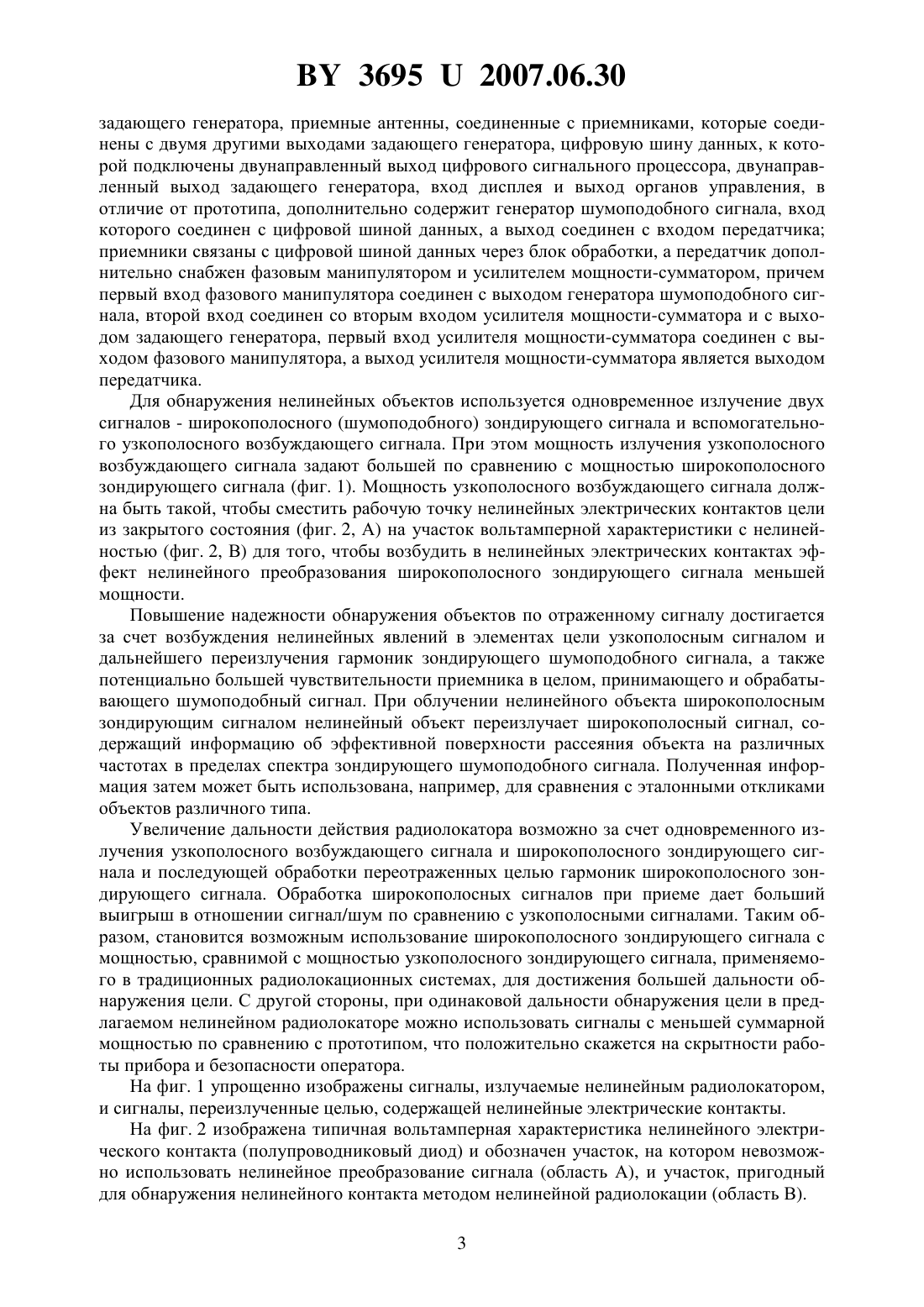
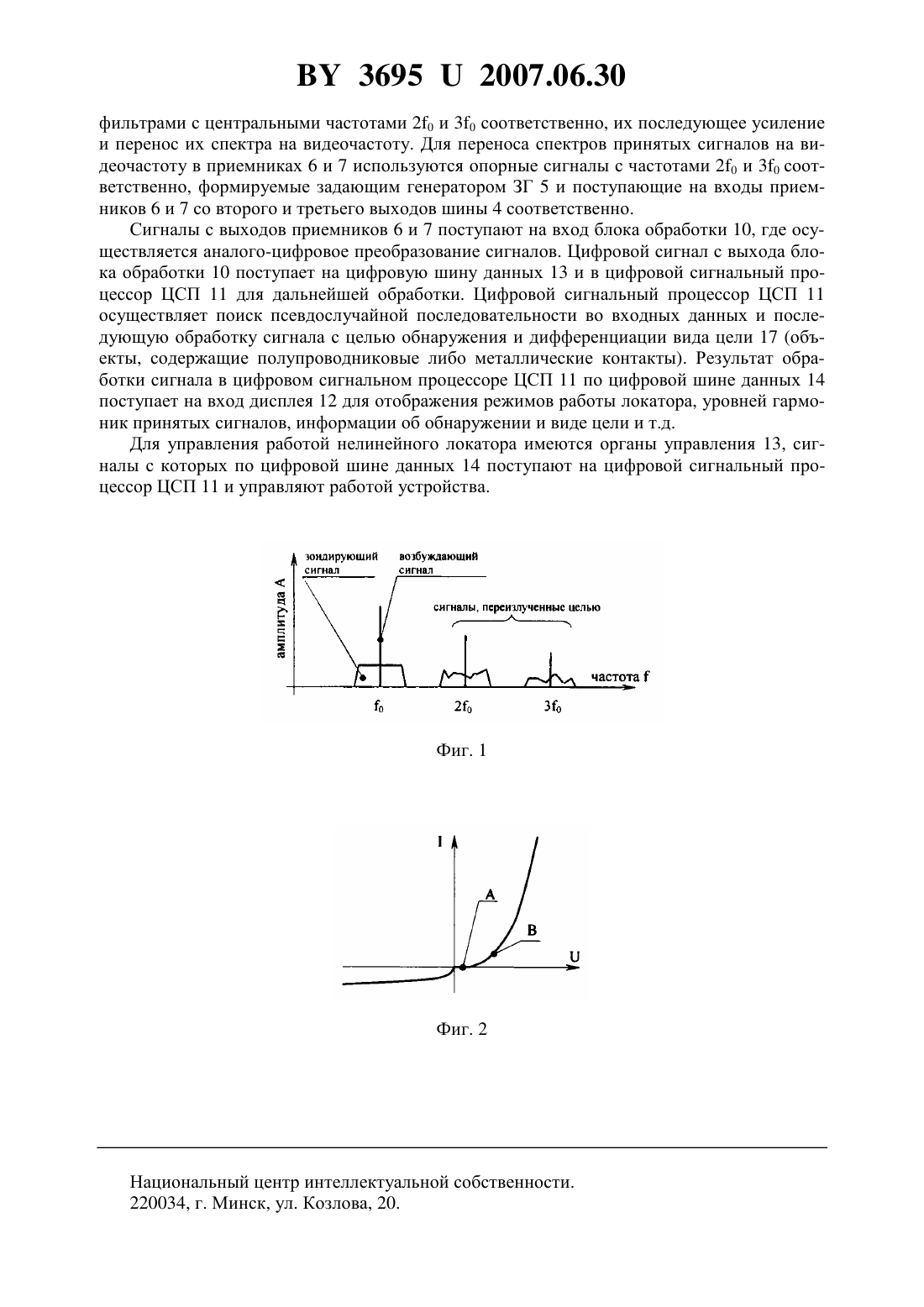
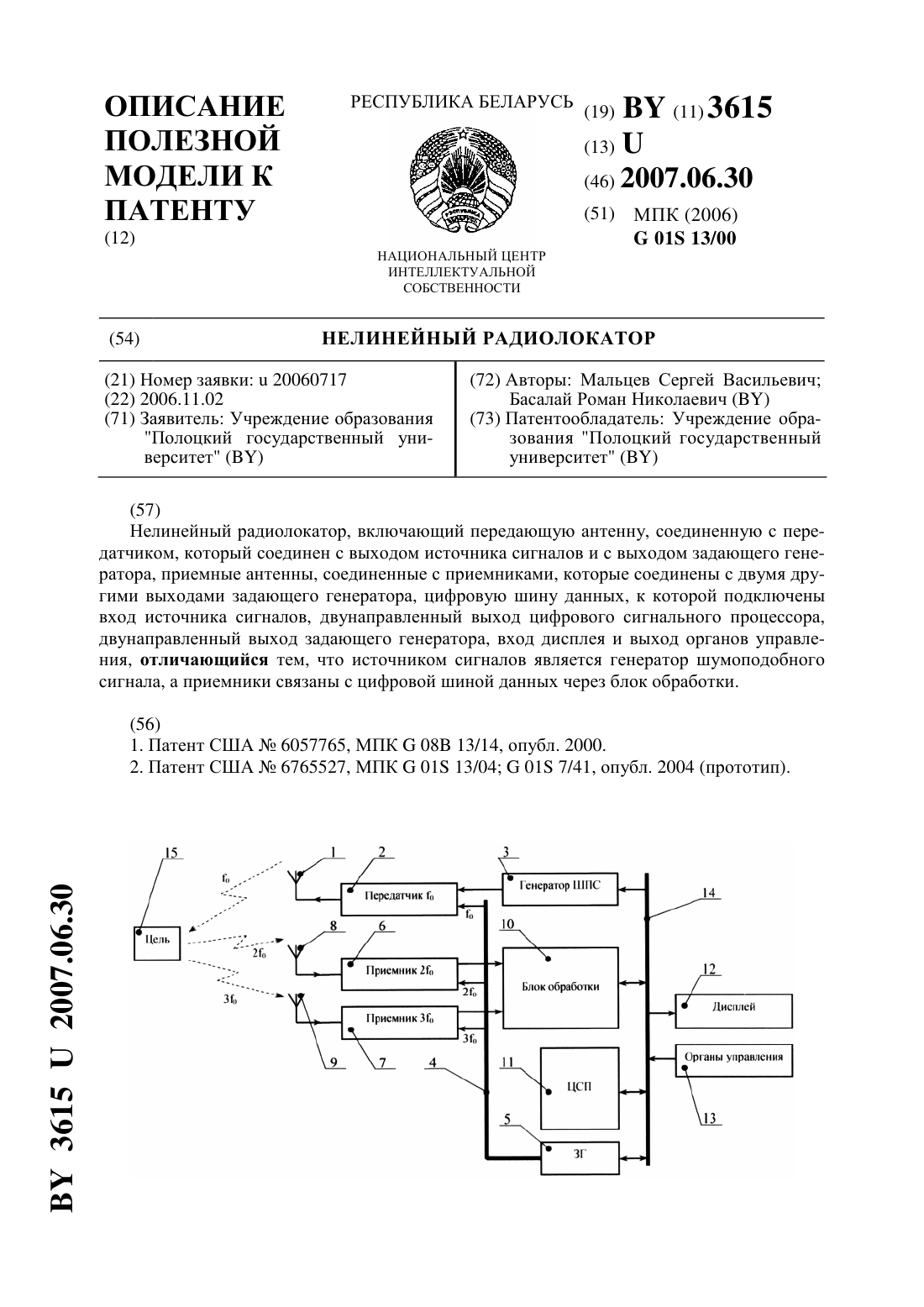
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Учреждение образования Полоцкий государственный университет(72) Авторы Мальцев Сергей Васильевич Басалай Роман Николаевич(73) Патентообладатель Учреждение образования Полоцкий государственный университет(57) Нелинейный радиолокатор, включающий передающую антенну, соединенную с передатчиком, который соединен с выходом задающего генератора, приемные антенны, соединенные с приемниками, которые соединены с другими выходами задающего генератора, цифровую шину данных, к которой подключены двунаправленный выход цифрового сигнального процессора, двунаправленный выход задающего генератора, вход дисплея и выход органов управления, отличающийся тем, что дополнительно содержит генератор шумоподобного сигнала, вход которого соединен с цифровой шиной данных, а выход соединен с входом передатчика приемники связаны с цифровой шиной данных через блок обработки, а передатчик дополнительно снабжен фазовым манипулятором и усилителем мощности-сумматором, причем первый вход фазового манипулятора соединен с выходом генератора шумоподобного сигнала, второй вход соединен со вторым входом усилителя мощности-сумматора и с выходом задающего генератора, первый вход усилителя мощности-сумматора соединен с выходом фазового манипулятора, а выход усилителя мощности-сумматора является выходом передатчика. 36952007.06.30 Устройство относится к области радиолокационной техники определения местоположения или обнаружения объектов с использованием отражения или переизлучения радиоволн и может быть применено для обнаружения и идентификации объектов, содержащих нелинейные электрические контакты типа металл-металл, полупроводник-металл либо полупроводник-полупроводник (в том числе скрытого оружия, электронных устройств несанкционированного съема информации, независимо от того, находятся они во включенном либо выключенном состоянии). Известен нелинейный радиолокатор 1, который позволяет обнаруживать объекты,содержащие нелинейные электрические контакты. Данное устройство содержит в своем составе антенну, передатчик гармонического зондирующего сигнала, приемник 2-й и 3-й гармоник переизлученного нелинейным объектом сигнала и микропроцессор. Недостатком данного устройства является то, что в качестве зондирующего сигнала используется узкополосный сигнал, излучаемый в пространство на фиксированной частоте, что ограничивает поисковые возможности системы и возможность дифференциации вида объекта по отраженному сигналу. Нелинейный объект в большинстве случаев имеет различную величину эффективной поверхности рассеяния на различных частотах, сложным образом зависящую от конструкции нелинейного объекта. Поэтому не представляется возможным заранее определить, на какой частоте необходимо производить исследование объекта для получения максимальной дальности обнаружения объекта. Наиболее близким по технической сущности является нелинейный радиолокатор 2,включающий, по меньшей мере, два источника сигналов, генерирующих первый сигнал 1 и второй сигнал 2 соответственно. Оба источника сигналов соединены с шиной данных и управляются задающим генератором. Сгенерированные сигналы 1 и 2 направляются к схеме передачи/объединения сигналов. Схема передачи/объединения сигналов затем направляет сигналы со своего выхода к паре антенн - высокочастотной направленной антенной решетке и низкочастотной всенаправленной антенной решетке. Антенны излучают сигнал в открытое пространство для поиска цели, имеющей нелинейные электрические контакты. Когда эти зондирующие сигналы взаимодействуют с целью, имеющей нелинейные электрические контакты, цель излучает обратно сигналы на частотах, которые являются точными кратными гармониками зондирующего сигнала. Высокочастотная направленная антенная решетка принимает сигналы, переизлученные целью, и направляет их в схему приема/объединения сигналов. Схема приема/объединения сигналов передает принятые сигналы в приемник/ демодулятор, который также соединен с шиной данных. Задающий генератор управляет работой схемы передачи/объединения сигналов и схемы приема/объединения сигналов. Цифровой сигнальный процессор, соединенный с шиной данных, обрабатывает демодулированные принятые сигналы. Результаты обработки из цифрового сигнального процессора направляются на дисплей. Недостатком этого устройства является то, что в качестве зондирующих сигналов используются только узкополосные сигналы. Такая техническая реализация ограничивает поисковые возможности системы обнаружения и идентификации объектов, содержащих нелинейные электрические контакты. Применение большого количества источников узкополосных (гармонических) сигналов для увеличения разрешающей способности радиолокатора по частоте приведет к существенному усложнению конструкции устройства и увеличению излучаемой мощности. К тому же достижение достаточно высокой зондирующей способности по частоте (возможной, например, при применении широкополосных сигналов) таким методом просто невозможно технически. Задачей полезной модели является повышение надежности обнаружения объектов и увеличение дальности действия радиолокатора. Поставленная задача решается за счет того, что нелинейный радиолокатор, включающий передающую антенну, соединенную с передатчиком, который соединен с выходом 2 36952007.06.30 задающего генератора, приемные антенны, соединенные с приемниками, которые соединены с двумя другими выходами задающего генератора, цифровую шину данных, к которой подключены двунаправленный выход цифрового сигнального процессора, двунаправленный выход задающего генератора, вход дисплея и выход органов управления, в отличие от прототипа, дополнительно содержит генератор шумоподобного сигнала, вход которого соединен с цифровой шиной данных, а выход соединен с входом передатчика приемники связаны с цифровой шиной данных через блок обработки, а передатчик дополнительно снабжен фазовым манипулятором и усилителем мощности-сумматором, причем первый вход фазового манипулятора соединен с выходом генератора шумоподобного сигнала, второй вход соединен со вторым входом усилителя мощности-сумматора и с выходом задающего генератора, первый вход усилителя мощности-сумматора соединен с выходом фазового манипулятора, а выход усилителя мощности-сумматора является выходом передатчика. Для обнаружения нелинейных объектов используется одновременное излучение двух сигналов - широкополосного (шумоподобного) зондирующего сигнала и вспомогательного узкополосного возбуждающего сигнала. При этом мощность излучения узкополосного возбуждающего сигнала задают большей по сравнению с мощностью широкополосного зондирующего сигнала (фиг. 1). Мощность узкополосного возбуждающего сигнала должна быть такой, чтобы сместить рабочую точку нелинейных электрических контактов цели из закрытого состояния (фиг. 2, А) на участок вольтамперной характеристики с нелинейностью (фиг. 2, В) для того, чтобы возбудить в нелинейных электрических контактах эффект нелинейного преобразования широкополосного зондирующего сигнала меньшей мощности. Повышение надежности обнаружения объектов по отраженному сигналу достигается за счет возбуждения нелинейных явлений в элементах цели узкополосным сигналом и дальнейшего переизлучения гармоник зондирующего шумоподобного сигнала, а также потенциально большей чувствительности приемника в целом, принимающего и обрабатывающего шумоподобный сигнал. При облучении нелинейного объекта широкополосным зондирующим сигналом нелинейный объект переизлучает широкополосный сигнал, содержащий информацию об эффективной поверхности рассеяния объекта на различных частотах в пределах спектра зондирующего шумоподобного сигнала. Полученная информация затем может быть использована, например, для сравнения с эталонными откликами объектов различного типа. Увеличение дальности действия радиолокатора возможно за счет одновременного излучения узкополосного возбуждающего сигнала и широкополосного зондирующего сигнала и последующей обработки переотраженных целью гармоник широкополосного зондирующего сигнала. Обработка широкополосных сигналов при приеме дает больший выигрыш в отношении сигнал/шум по сравнению с узкополосными сигналами. Таким образом, становится возможным использование широкополосного зондирующего сигнала с мощностью, сравнимой с мощностью узкополосного зондирующего сигнала, применяемого в традиционных радиолокационных системах, для достижения большей дальности обнаружения цели. С другой стороны, при одинаковой дальности обнаружения цели в предлагаемом нелинейном радиолокаторе можно использовать сигналы с меньшей суммарной мощностью по сравнению с прототипом, что положительно скажется на скрытности работы прибора и безопасности оператора. На фиг. 1 упрощенно изображены сигналы, излучаемые нелинейным радиолокатором,и сигналы, переизлученные целью, содержащей нелинейные электрические контакты. На фиг. 2 изображена типичная вольтамперная характеристика нелинейного электрического контакта (полупроводниковый диод) и обозначен участок, на котором невозможно использовать нелинейное преобразование сигнала (область А), и участок, пригодный для обнаружения нелинейного контактаметодом нелинейной радиолокации (область В). 3 36952007.06.30 На фиг. 3 представлена структурная блок-схема заявляемого устройства. Нелинейный радиолокатор содержит передающую антенну 1, соединенную с выходом передатчика 2, первый вход которого подключен к выходу генератора ШПС (шумоподобного сигнала) 3, а второй вход соединен с первым выходом шины 4, которая соединена с выходом задающего генератора ЗГ 5. Второй и третий выходы шины 4 подключены соответственно ко вторым входам приемников 6 и 7, к первым входам которых подключены приемные антенны 8 и 9 соответственно. Выходы приемников 6 и 7 соединены с первым и вторым входами блока обработки 10. Двунаправленный выход блока обработки 10, вход генератора ШПС 3, двунаправленный выход цифрового сигнального процессора ЦСП 11,двунаправленный выход задающего генератора ЗГ 5, вход дисплея 12 и выход органов управления 13 подключены к цифровой шине данных 14. Передатчик 2 включает фазовый манипулятор ФМн 15 и усилитель мощности-сумматор УМ- 16. Первый вход фазового манипулятора ФМн 15 соединен с выходом генератора ШПС 3, второй вход соединен со вторым входом усилителя мощности-сумматора УМ- 16 и с первым выходом шины 4,первый вход усилителя мощности-сумматора УМ- 16 соединен с выходом фазового манипулятора ФМн 15, а выход усилителя мощности-сумматора УМ- 16, являющийся выходом передатчика 2, соединен с передающей антенной 1. Нелинейный радиолокатор работает следующим образом. Генератор ШПС 3 формирует псевдослучайную последовательность, выбор которой осуществляется цифровым сигнальным процессором ЦСП 11. Псевдослучайная последовательность с выхода генератора ШПС 3 поступает на один из входов передатчика 2 и модулирует в фазовом манипуляторе ФМн 15 несущую частоту 0, поступающую в передатчик 2 по шине 4 с выхода задающего генератора ЗГ 5. Сигнал с манипулированной согласно символам псевдослучайной последовательности фазой с центральной частотой 0 с выхода фазового манипулятора поступает на первый вход усилителя мощности-сумматора УМ- 16. Сигнал несущей частоты 0 с выхода шины 4 также поступает в передатчике 2 на второй вход усилителя мощности-сумматора УМ- 16. В усилителе мощности-сумматоре УМ- 16 осуществляется усиление широкополосного зондирующего сигнала, поступающего на первый вход, усиление узкополосного возбуждающего сигнала с частотой 0, поступающего на второй вход, и их смешивание. Коэффициент усиления узкополосного возбуждающего сигнала в усилителе мощности-сумматоре УМ- 16 выбирают большим по сравнению с коэффициентом усиления широкополосного зондирующего сигнала. Мощность узкополосного возбуждающего сигнала задают такой, чтобы сместить рабочую точку нелинейных электрических контактов цели из закрытого состояния (фиг. 2, А) на участок вольтамперной характеристики с нелинейностью (фиг. 2, В) для того, чтобы возбудить в нелинейных электрических контактах цели эффект нелинейного преобразования широкополосного зондирующего сигнала меньшей мощности. Результирующий сигнал с выхода усилителя мощности-сумматора УМ- 16 поступает в передающую антенну 1, которая излучает комбинированный сигнал в пространство. Комбинированный сигнал на центральной частоте 0 распространяется в пространстве и взаимодействует с целью 17, которая имеет нелинейные электрические контакты. При этом узкополосная возбуждающая составляющая комбинированного сигнала с большей мощностью смещает рабочую точку нелинейных электрических контактов цели 17 из закрытого состояния (фиг. 2, А) на участок вольтамперной характеристики с нелинейностью(фиг. 2, В). Одновременно в смещенных нелинейных электрических контактах цели 17 происходит нелинейное преобразование широкополосной зондирующей составляющей комбинированного сигнала и переизлучение ее гармоник на частотах, которые являются кратными гармониками частоты 0. Приемные антенны 8 и 9 служат для приема переизлученных целью 15 сигналов на центральных частотах 20 и 30 соответственно. Сигналы с антенн 8 и 9 поступают в приемники 6 и 7, в которых осуществляется фильтрация принятых сигналов полосовыми 4 36952007.06.30 фильтрами с центральными частотами 20 и 30 соответственно, их последующее усиление и перенос их спектра на видеочастоту. Для переноса спектров принятых сигналов на видеочастоту в приемниках 6 и 7 используются опорные сигналы с частотами 20 и 30 соответственно, формируемые задающим генератором ЗГ 5 и поступающие на входы приемников 6 и 7 со второго и третьего выходов шины 4 соответственно. Сигналы с выходов приемников 6 и 7 поступают на вход блока обработки 10, где осуществляется аналого-цифровое преобразование сигналов. Цифровой сигнал с выхода блока обработки 10 поступает на цифровую шину данных 13 и в цифровой сигнальный процессор ЦСП 11 для дальнейшей обработки. Цифровой сигнальный процессор ЦСП 11 осуществляет поиск псевдослучайной последовательности во входных данных и последующую обработку сигнала с целью обнаружения и дифференциации вида цели 17 (объекты, содержащие полупроводниковые либо металлические контакты). Результат обработки сигнала в цифровом сигнальном процессоре ЦСП 11 по цифровой шине данных 14 поступает на вход дисплея 12 для отображения режимов работы локатора, уровней гармоник принятых сигналов, информации об обнаружении и виде цели и т.д. Для управления работой нелинейного локатора имеются органы управления 13, сигналы с которых по цифровой шине данных 14 поступают на цифровой сигнальный процессор ЦСП 11 и управляют работой устройства. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 5
МПК / Метки
МПК: G01S 13/00
Метки: радиолокатор, нелинейный
Код ссылки
<a href="https://by.patents.su/5-u3695-nelinejjnyjj-radiolokator.html" rel="bookmark" title="База патентов Беларуси">Нелинейный радиолокатор</a>
Нелинейный радиолокатор
Номер патента: U 3615
Опубликовано: 30.06.2007
Авторы: Мальцев Сергей Васильевич, Басалай Роман Николаевич
МПК: G01S 13/00
Метки: радиолокатор, нелинейный
Текст:
...нелинейный радиолокатор, включающий передающую антенну, соединенную с передатчиком, который соединен с выходом источника сигналов и с выходом задающего генератора, приемные антенны, соединенные с приемниками, которые соединены с двумя другими выходами задающего генератора,цифровую шину данных, к которой подключены вход источника сигналов, двунаправленный выход цифрового сигнального процессора, двунаправленный выход задающего генератора,...
Устройство нелинейной радиолокации
Номер патента: U 3616
Опубликовано: 30.06.2007
Авторы: Басалай Роман Николаевич, Мальцев Сергей Васильевич
МПК: G01S 13/00
Метки: радиолокации, устройство, нелинейной
Текст:
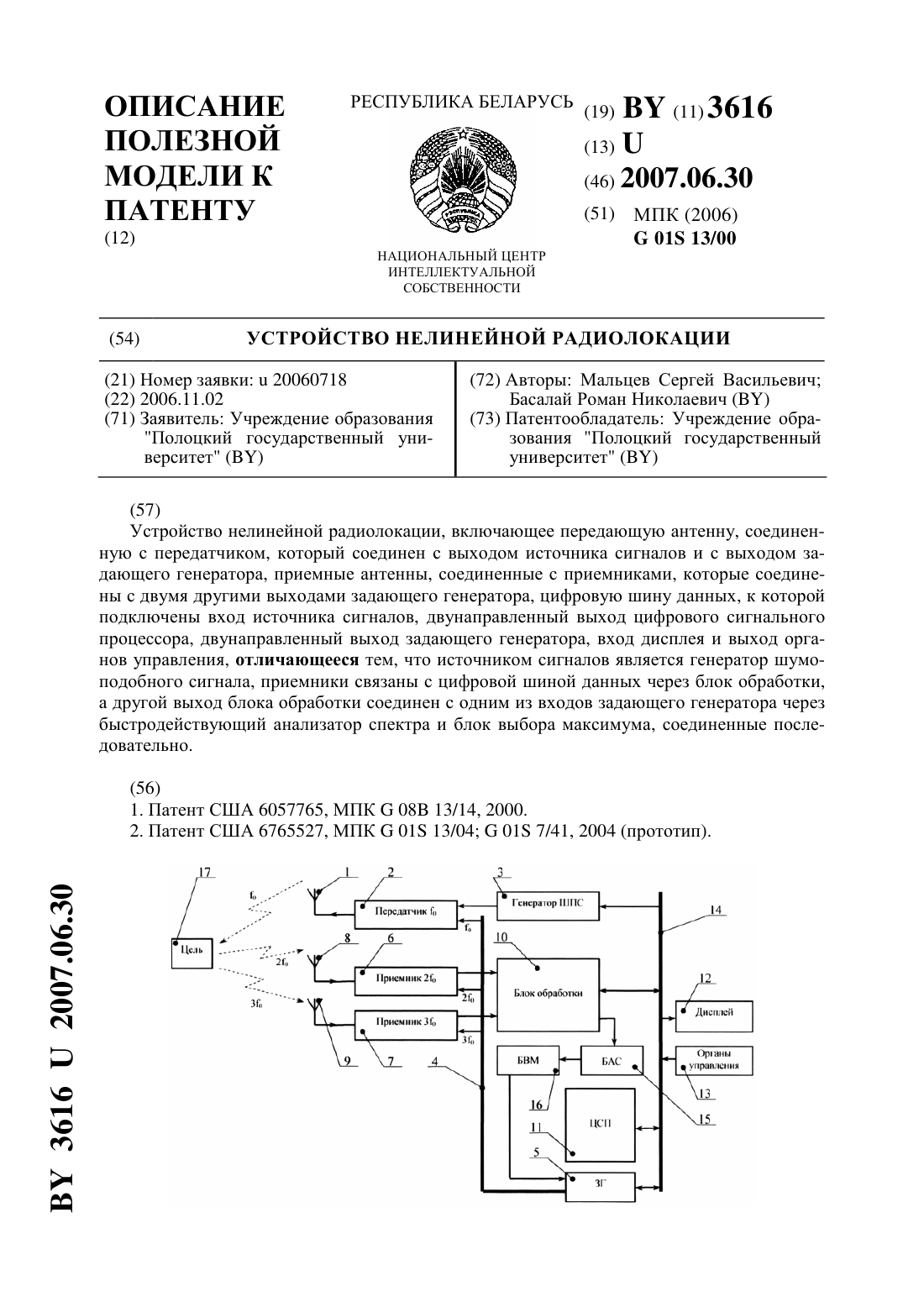
...надежности дифференциации объектов по отраженному сигналу достигается за счет применения широкополосного зондирующего сигнала. При облучении нелинейного объекта таким сигналом нелинейный объект переизлучает широкополосный сигнал, содержащий информацию об эффективной поверхности рассеяния объекта на различных частотах, которая может быть использована затем для, например, сравнения с эталонными откликами объектов различного вида....
Акустическое устройство измерения расстояния до объекта
Номер патента: 4774
Опубликовано: 30.12.2002
Авторы: Шахлевич Григорий Михайлович, Достанко Анатолий Павлович, Боженков Владимир Владимирович, Осипов Анатолий Николаевич
МПК: G01S 15/08
Метки: устройство, измерения, объекта, расстояния, акустическое
Текст:
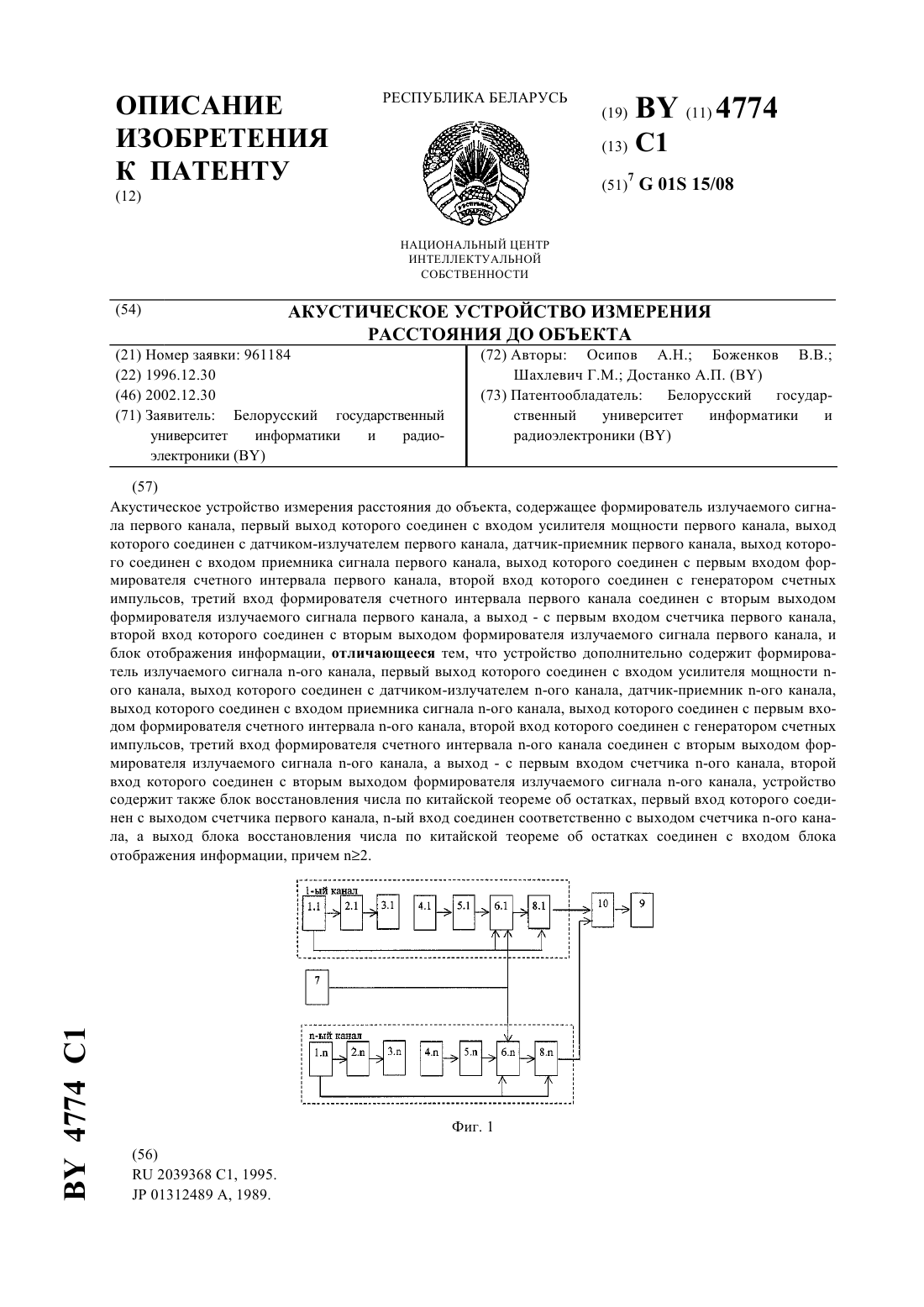
...Объект зондируетсясигналами, характеризующимися различными периодами следования сигнала, и определение расстояния до объекта производится порезультатам измерений в соответствии с китайской теоремой об остатках. Это позволяет измерять расстояние до объекта зондирующими сигналами с малой скважностью. На фиг. 1 приведена структурная схема устройства. На фиг. 2 и фиг. 3 приведены структурные схемы соответственно формирователя излучаемого...
Тренажер с дозированием физических нагрузок
Номер патента: 109
Опубликовано: 30.09.1994
Авторы: Фролов А. В., Сидоренко Г. И.
МПК: A63B 69/00
Метки: нагрузок, тренажер, дозированием, физических
Текст:
...- с у . устройство 2, расположенное на велоэргомеъ поставившая цепь достигается тем, чго . ре 1, регулятор нагрузки 3, соединенный с тренажер с дозированием фнзнческих нагру- нагрузочным устройством 2, индикатор 4, зон, содержащий вецозргометр, нагрувочъхое- установленный на велоэргометре, генераторпостели овлзон с нагрузочнымдусрройсщвом до генератор 6 стдйттътх чисстьтсумматоргддуо выхоц которого соединетт ас пншйсашром Ь. ды...
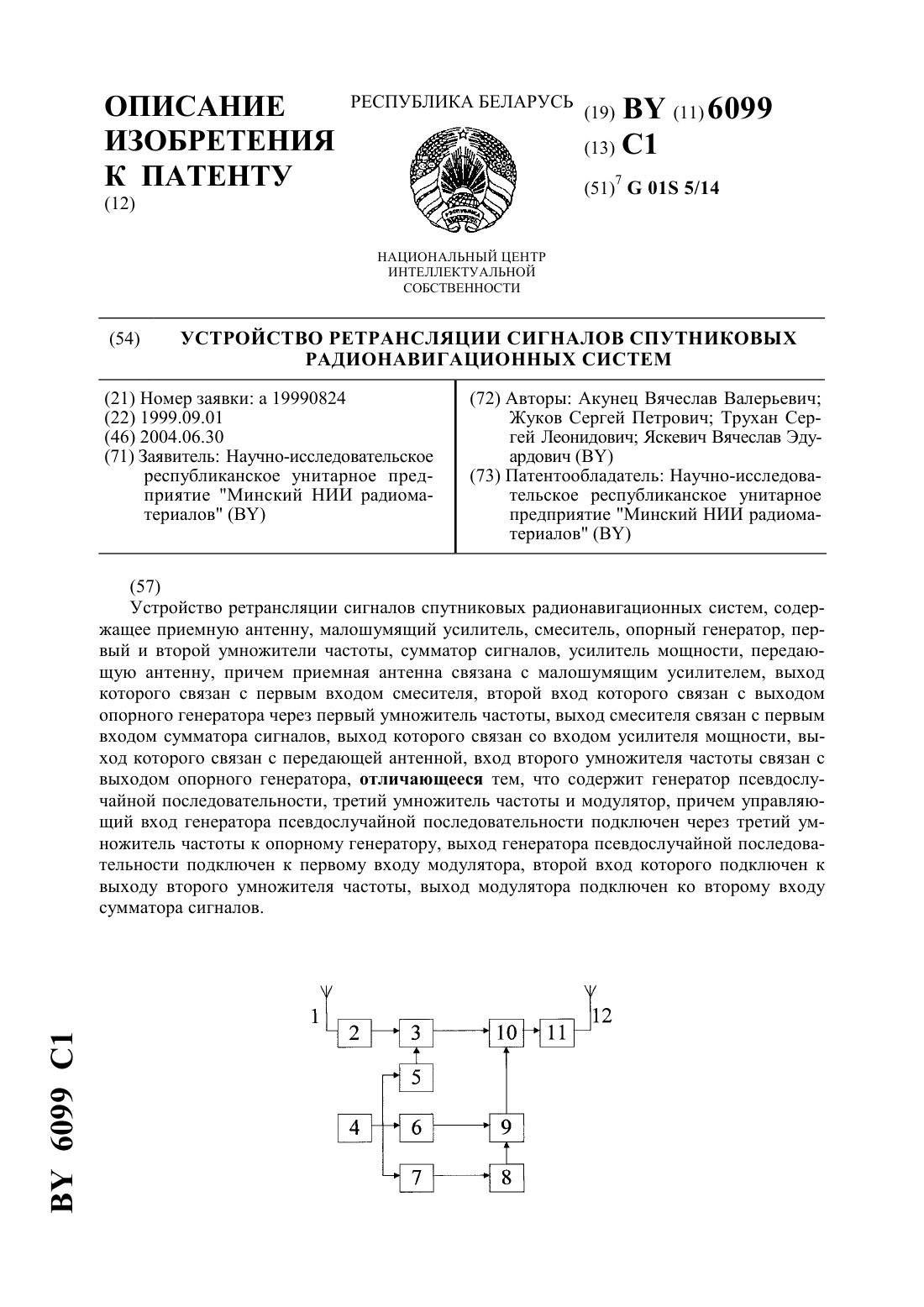
Устройство ретрансляции сигналов спутниковых радионавигационных систем
Номер патента: 6099
Опубликовано: 30.06.2004
Авторы: Акунец Вячеслав Валерьевич, Яскевич Вячеслав Эдуардович, Трухан Сергей Леонидович, Жуков Сергей Петрович
МПК: G01S 5/14
Метки: систем, спутниковых, сигналов, радионавигационных, ретрансляции, устройство
Текст:
...приема информационного сигнала. Кроме того, необходимость использования допол 2 6099 1 нительного канала для передачи пилот-сигнала приводит к расширению полосы частот радиоканала ретранслятор - базовая станция. Задачей настоящего изобретения является обеспечение энергетического баланса информационного сигнала и пилот-сигнала и сужение рабочей полосы частот. Поставленная задача достигается тем, что устройство ретрансляции сигналов...
Предыдущий патент: Колесо низкого довления и повышенного демпфирования
Следующий патент: Стенд для исследования взаимодействия колес с почвой при статическом и вибродинамическом характере нагружения
Случайный патент: Дозирующее устройство для подачи порошковых материалов