Устройство для регулируемой подачи эластомерной нити на чулочном автомате
Номер патента: 5949
Опубликовано: 30.03.2004
Авторы: Чарковский Александр Владимирович, Кукушкин Максим Леонидович

Текст
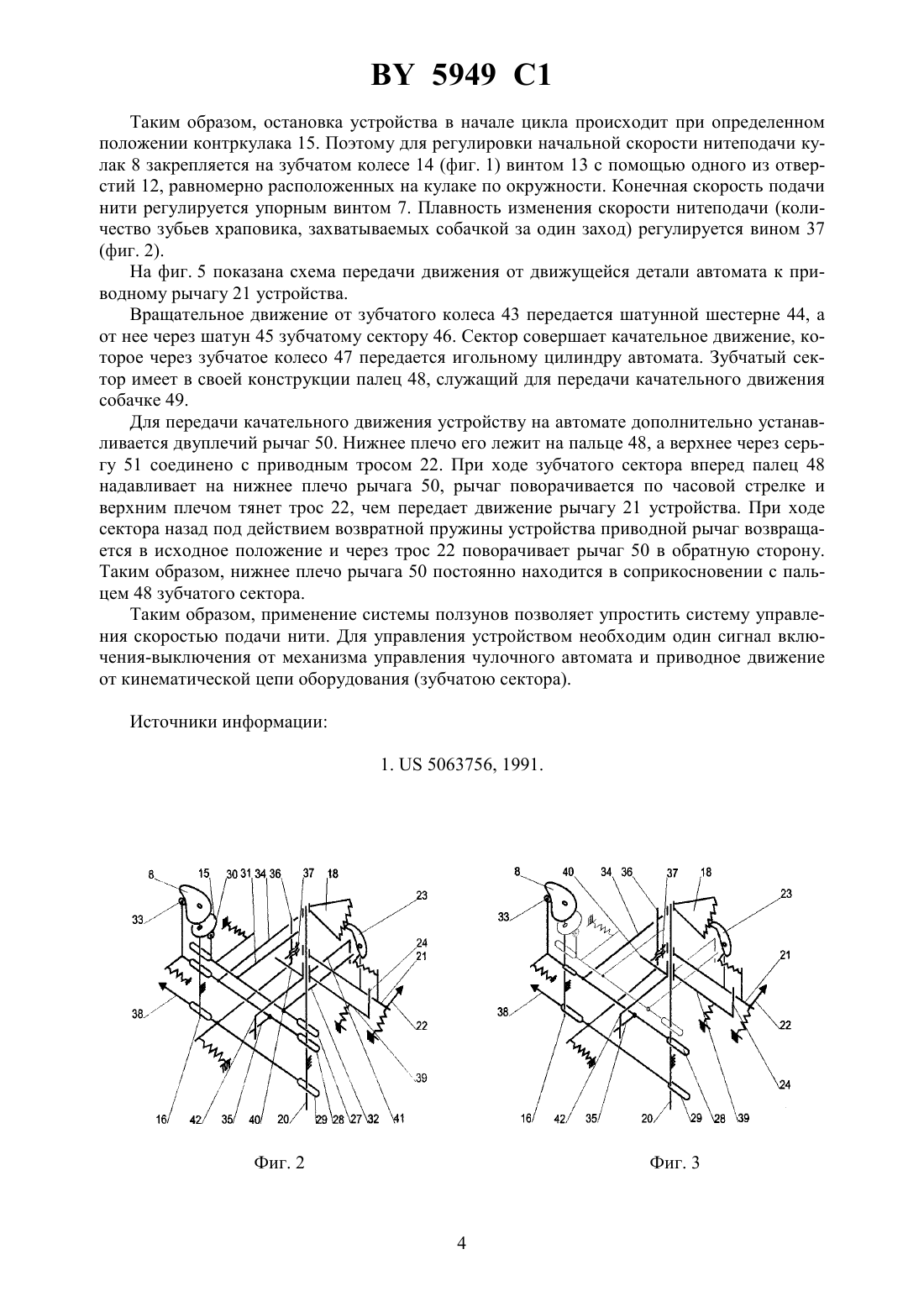
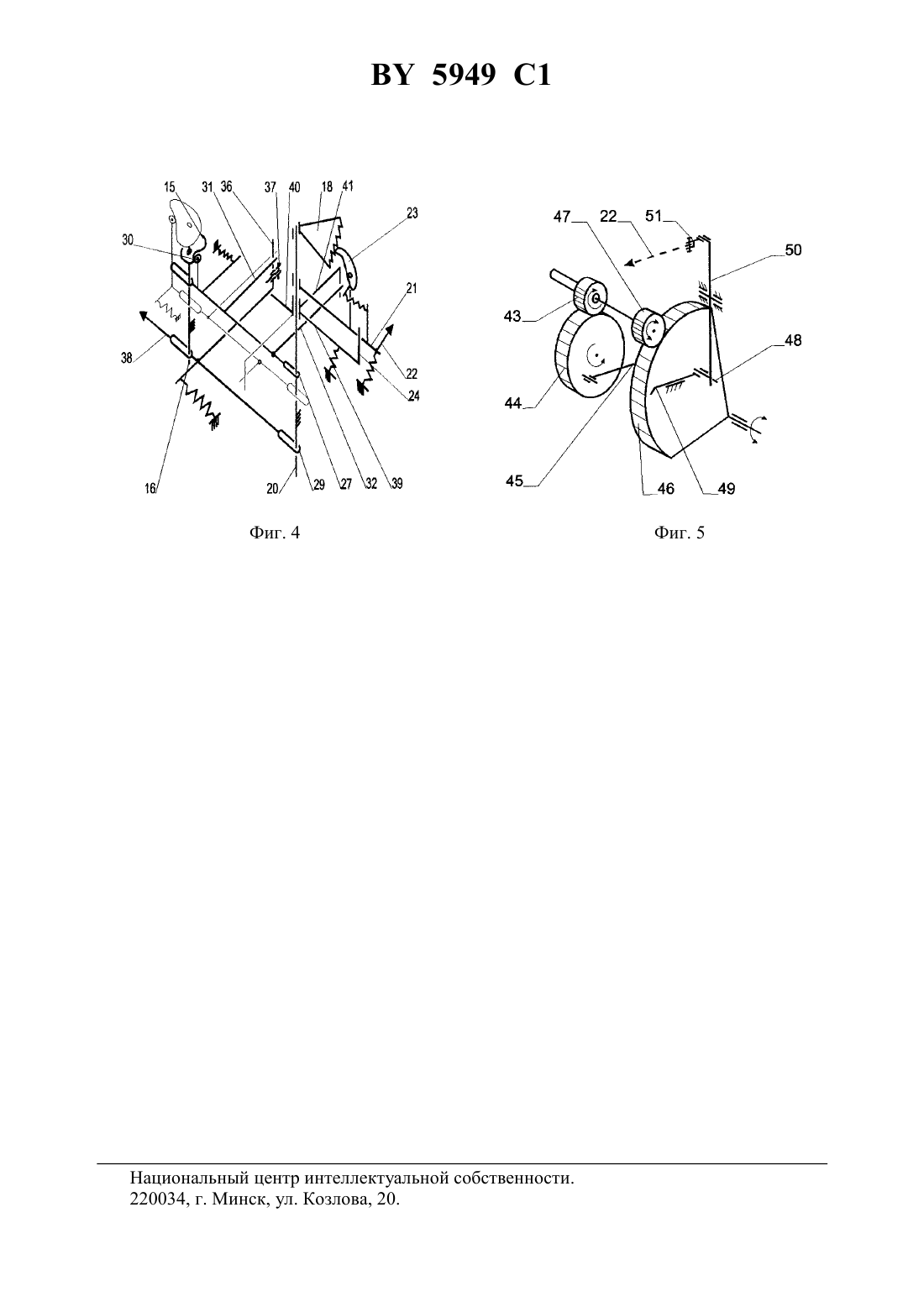
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО ДЛЯ РЕГУЛИРУЕМОЙ ПОДАЧИ ЭЛАСТОМЕРНОЙ НИТИ НА ЧУЛОЧНОМ АВТОМАТЕ(71) Заявитель Витебский государственный технологический университет(72) Авторы Кукушкин Максим Леонидович Чарковский Александр Владимирович(73) Патентообладатель Витебский государственный технологический университет(57) Устройство для регулируемой подачи эластомерной нити на чулочном автомате, содержащее станину, нитенаправители, торцевой вариатор с ведущим и ведомым дисками,рычаг ведомого диска, механизм перемещения рычага, отличающееся тем, что механизм перемещения рычага выполнен в виде кулака, приводимого в движение зубчатой передачей и храповым механизмом через гибкую связь от перемещающейся детали привода чулочного автомата, и содержит систему ползунов, управляющих работой храпового механизма таким образом, что ведомое зубчатое колесо всегда останавливается в определенных положениях, при этом для регулировки начальной скорости подачи нити предусмотрена возможность ступенчатого поворота кулака относительно положений ведомого зубчатого колеса, а конечная скорость подачи нити регулируется ограничением перемещения рычага ведомого диска.(56)5063756, 1991.1568893 А 3, 1990.94036080 1, 1996.95107662 А 1, 1997.452489 1, 1991.11217755 , 1999. Изобретение относится к технологии трикотажного производства, а именно к производству чулочно-носочных изделий медицинского назначения с использованием эластомерных нитей. Наиболее близким по конструкции к предлагаемому устройству является устройство для подачи эластомерных нитей на круглочулочных автоматах 1. Указанное устройство содержит станину, нитенаправители, торцевой вариатор с ведущим и ведомым дисками, рычаг для перемещения ведомого диска, механизм перемещения рычага. При работе данного устройства изменение положения ведомого фрикционного диска вариатора осуществляется с помощью электродвигателя через промежуточный рычаг в процессе работы механизма. Перемещение фрикционного диска на больший радиус ведущего диска вариатора соответствует увеличению скорости подачи нити. Недостатком указанного устройства является сложность управления электродвигателем во время выработки изделий. Технической задачей, на решение которой направлено изобретение, является упрощение системы управления скоростью подачи нити. Указанная задача решается за счет того, что при использовании существенных признаков известного устройства, включающего станину, нитенаправители, торцевой вариатор с ведущим и ведомым дисками, рычаг для перемещения ведомого диска, механизм перемещения рычага, согласно изобретению, в устройстве для регулируемой подачи эластомерной нити на чулочном автомате механизм перемещения рычага выполнен в виде кулака, приводимого в движение храповым механизмом через гибкую связь от перемещающейся детали привода автомата. На фиг. 1 изображена кинематическая схема устройства для регулируемой подачи эластомерной нити на чулочном автомате. На фиг. 2 изображена кинематическая схема механизма управления устройства для регулируемой подачи эластомерной нити на чулочном автомате. На фиг. 3 изображено взаимодействие деталей механизма управления устройства при остановке в конечном положении. На фиг. 4 изображено взаимодействие деталей механизма управления устройства при нахождении нитеподатчика в исходном положении (начало цикла вязания изделия). Устройство (фиг. 1) состоит из ведущего диска 1 торцевого вариатора, приводимого во вращение от вала 2 чулочного автомата. К ведущему диску с помощью рычага 4 и пружины 5 прижимается ведомый диск 3 нитеподающего устройства. Рычаг имеет возможность перемещаться но направляющей 6. Для ограничения его перемещения предусмотрен ограничительный винт 7. С помощью пружины рычаг прижимается к поверхности кулака 8, взаимодействуя с ней посредством ролика 9. Нить 10 проходит через нитенаправители 11 и располагается между поверхностями двух дисков. Кулак управления имеет ряд сквозных отверстий 12, расположенных по окружности с одинаковым шагом. Через одно из них с помощью винта 13 он соединен с ведомым зубчатым колесом 14, имеющим одно крепежное отверстие. Снизу на зубчатом колесе жестко закреплен контркулак 15. Все три детали имеют возможность вращаться на оси 16. С зубчатым колесом находится в зацеплении ведущая шестерня 17, жестко соединенная с храповым колесом 18 и ступицей 19. Эти детали вращаются на оси 20. На этой же оси расположен приводной рычаг 21, получающий качательное движение через привод 2 5949 1 ной трос 22 и приводной рычаг от зубчатого сектора чулочного автомата. На рычаге установлена собачка 23 храпового механизма. Включение и выключение приводного рычага из работы производится рычагом управления 24. Для предотвращения самопроизвольного проворачивания зубчатой пары ступицу 19 охватывает ленточный тормоз 25, один конец которого жестко закреплен на станине. Для регулировки натяжения тормоза предусмотрена винтовая пара 26. На осях 16 и 20 установлены ползуны управления 27, 28, 29 (фиг. 2), которые имеют возможность перемещаться в направлении продольной оси механизма. Ползун управления 27 имеет на одном конце ролик 30, который пружиной прижимается к поверхности контркулака 15. Ползун имеет также плечо включения 31 и плечо управления 32. Ползун 28 имеет на конце ролик 33, прижимаемый пружиной к кулаку 8. В конструкции ползуна предусмотрены плечо включения 34 и плечо управления 35. Ползун 29 имеет переключающее плечо 36 с регулировочным винтом 37 и приводится в движение от троса управления автомата 38. На оси 20 установлен четырехплечий управляющий рычаг 24. В своем составе он имеет рабочее плечо 39, плечо регулировки 40 и плечи управления 41 и 42. Устройство работает следующим образом. В исходном положении механизма зубчатая пара 14 и 17 (фиг. 1) неподвижна, положение ведомого ролика вариатора неизменно. Нить подается с постоянной скоростью. Трос управления автомата 38 натянут, ползун 29 смещен влево (фиг. 2). Переключающее плечо 36 ползуна действует на плечо включения 34 ползуна 28, отводя ролик 33 от кулака. Контркулак 15 повернут к ролику 30 минимальным радиусом. Вследствии этого ползун 27 сдвинут влево. Плечом управления 32 он действует на плечо управления 41 управляющего рычага 24 и удерживает его в исходном положении. Соответственно приводной рычаг 21 находится также в исходном положении(прижат к рычагу 24) и качаний его не происходит. При необходимости изменения скорости подачи нити освобождается трос управления 38, ползун 29 под действием пружины смещается вправо, действуя переключающим плечом 36 на плечо включения 31 ползуна 27. Ползун 27 смещается вправо, освобождая рычаг 24, который в свою очередь освобождает приводной рычаг 21. Рычаг 21 ложится плечом регулировки 40 на ограничительный винт 37, который определяет его крайнее рабочее положение (максимальное количество захватываемых зубьев храповика). Приводной трос 22 через приводной рычаг и собачку проталкивает храповик 18, поворачивая через зубчатую пару кулак управления, изменяя тем самым положение ведомого диска вариатора, а значит, и скорость подачи нити. При достижении крайней величины скорости нитеподачи рычаг 4 упирается в ограничительный винт 7 (фиг. 1). Поворот кулака продолжается до тех пор, пока ролик 33 не попадет на минимальный радиус кулака 8 (фиг. 3). При этом ползун 28 занимает крайнее правое положение, действуя плечом управления 35 на плечо 42 управляющего рычага. Рычаг поворачивается против часовой стрелки и рабочим плечом 39 поворачивает приводной рычаг 21 в исходное положение. Храповое колесо останавливается. Для возвращения устройства в исходное положение перед вязанием нового изделия натягивается трос управления автомата 38. Ползун 29 смещается влево. Переключающим плечом 36 он воздействует на плечо включения 34 ползуна 28, смещая его влево. Управляющий рычаг 24 поворачивается но часовой стрелке, освобождая приводной рычаг 21. Благодаря тому, что ползун 29 сдвинут влево, плечо регулировки 40 рычага 24 проходит мимо регулировочного винта 37, и рычаг поворачивается на максимально возможный угол(фиг. 4). Это позволяет максимально быстро вернуть механизм в исходное положение. Возврат продолжается до тех пор, пока ролик 30 не ляжет на минимальный радиус контркулака 15. После этого ползун 27 смещается влево, плечом управления 32 действуя на плечо 41 и поворачивая рычаг 24. Управляющий рычаг сдвигает приводной рычаг 21 в исходное нерабочее положение. Устройство останавливается в начале цикла. 5949 1 Таким образом, остановка устройства в начале цикла происходит при определенном положении контркулака 15. Поэтому для регулировки начальной скорости нитеподачи кулак 8 закрепляется на зубчатом колесе 14 (фиг. 1) винтом 13 с помощью одного из отверстий 12, равномерно расположенных на кулаке по окружности. Конечная скорость подачи нити регулируется упорным винтом 7. Плавность изменения скорости нитеподачи (количество зубьев храповика, захватываемых собачкой за один заход) регулируется вином 37(фиг. 2). На фиг. 5 показана схема передачи движения от движущейся детали автомата к приводному рычагу 21 устройства. Вращательное движение от зубчатого колеса 43 передается шатунной шестерне 44, а от нее через шатун 45 зубчатому сектору 46. Сектор совершает качательное движение, которое через зубчатое колесо 47 передается игольному цилиндру автомата. Зубчатый сектор имеет в своей конструкции палец 48, служащий для передачи качательного движения собачке 49. Для передачи качательного движения устройству на автомате дополнительно устанавливается двуплечий рычаг 50. Нижнее плечо его лежит на пальце 48, а верхнее через серьгу 51 соединено с приводным тросом 22. При ходе зубчатого сектора вперед палец 48 надавливает на нижнее плечо рычага 50, рычаг поворачивается по часовой стрелке и верхним плечом тянет трос 22, чем передает движение рычагу 21 устройства. При ходе сектора назад под действием возвратной пружины устройства приводной рычаг возвращается в исходное положение и через трос 22 поворачивает рычаг 50 в обратную сторону. Таким образом, нижнее плечо рычага 50 постоянно находится в соприкосновении с пальцем 48 зубчатого сектора. Таким образом, применение системы ползунов позволяет упростить систему управления скоростью подачи нити. Для управления устройством необходим один сигнал включения-выключения от механизма управления чулочного автомата и приводное движение от кинематической цепи оборудования (зубчатою сектора). Источники информации 1.5063756, 1991. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 5
МПК / Метки
МПК: D04B 15/50
Метки: подачи, эластомерной, нити, регулируемой, устройство, чулочном, автомате
Код ссылки
<a href="https://by.patents.su/5-5949-ustrojjstvo-dlya-reguliruemojj-podachi-elastomernojj-niti-na-chulochnom-avtomate.html" rel="bookmark" title="База патентов Беларуси">Устройство для регулируемой подачи эластомерной нити на чулочном автомате</a>
Способ определения наличия запаса нити в устройстве для накопления и подачи нити и устройство для накопления и подачи нити
Номер патента: 4127
Опубликовано: 30.09.2001
Авторы: ХУСС, Рольф, ЯКОБССОН, Курт Арне Гуннар, ВЕБЕР, Фридрих, ТОЛАНДЕР, Ларс Хельге Готтфрид
МПК: B65H 51/22, D04B 15/48, D03D 47/36...
Метки: накопления, нити, устройстве, способ, устройство, запаса, подачи, определения, наличия
Текст:
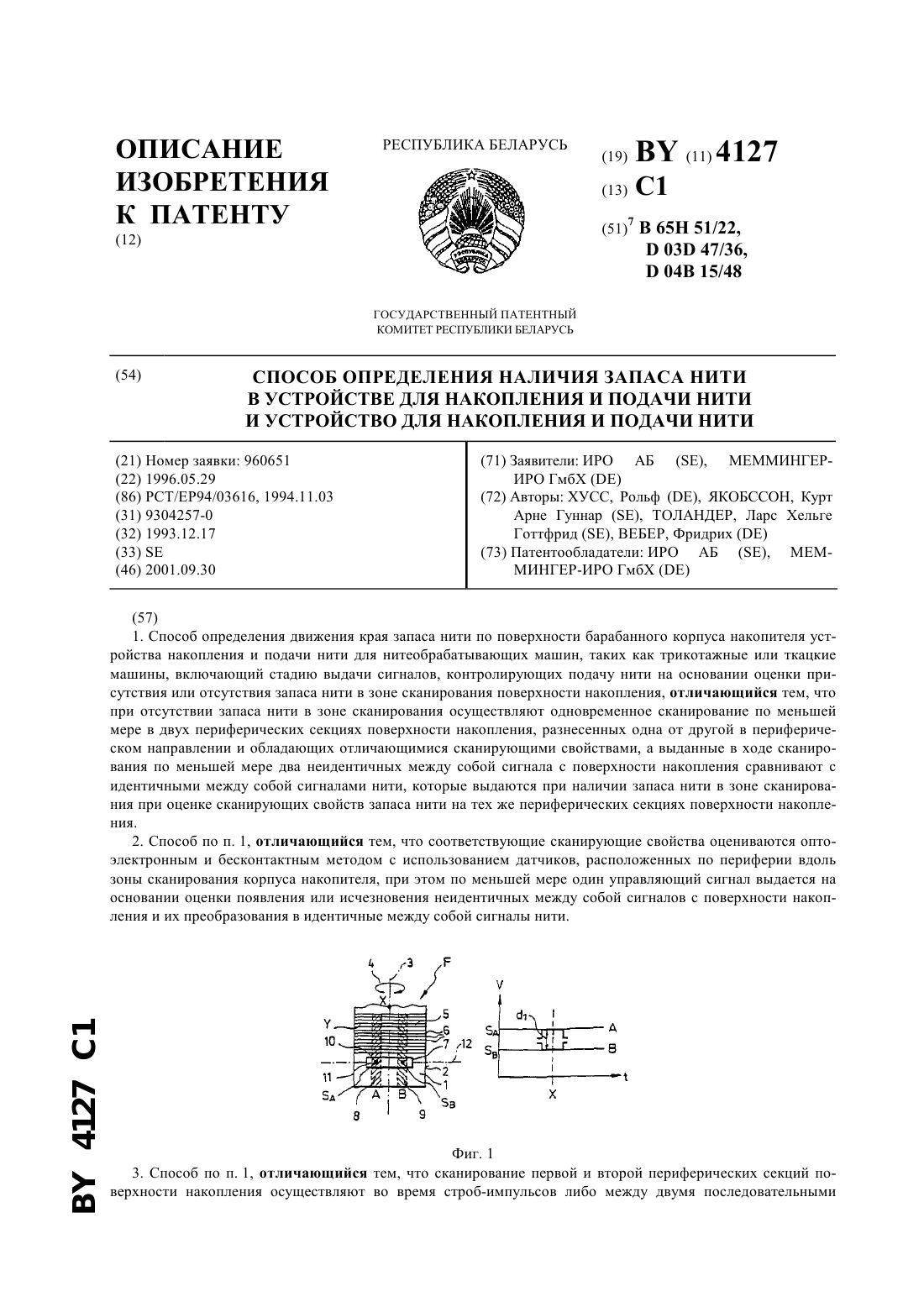
...сигналов поверхности накопления или на появление последовательности сигналов углового положения или строб-импульсов, причем каждая из упомянутых последовательностей имеет чередующиеся уровни сигнала, а переключатель остановки машины срабатывает по истечении определенного промежутка времени с момента непоявления или появления чередующихся уровней сигнала, указывающих на максимально допустимую скорость. Информация о скорости...
Устройство накопления и подачи нити
Номер патента: 3378
Опубликовано: 30.06.2000
Авторы: ХЕЛЬСТРЕМ Йеркер, АЛЬБЕРИД Оке
МПК: D03D 47/34
Метки: накопления, нити, устройство, подачи
Текст:
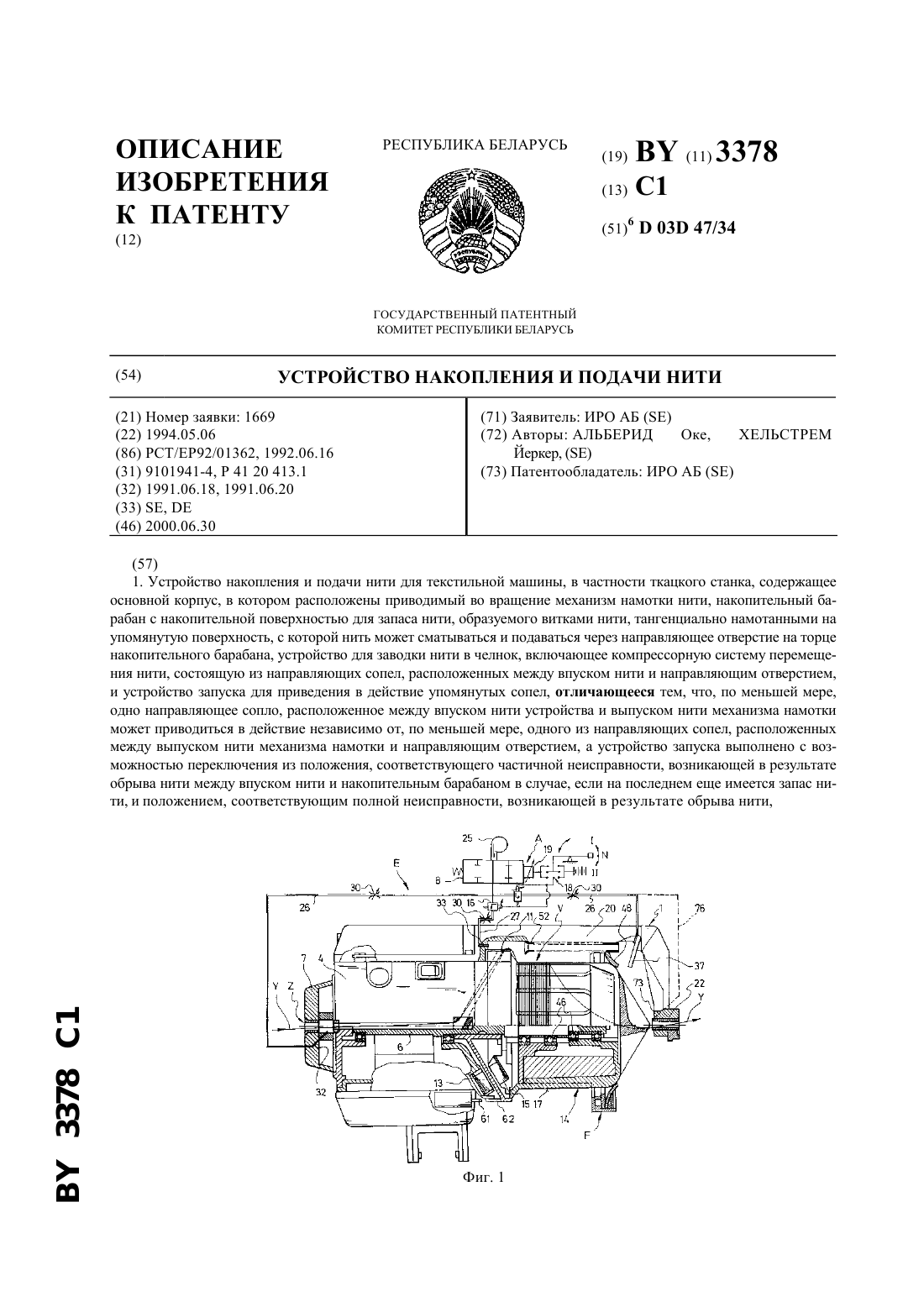
...специально вырабатываются при возникновении неисправности и которые свидетельствуют, например, является ли накопительный барабан пустым или на нем имеется еще запас нити. Это применимо также и к альтернативному варианту в соответствии с пунктом 8. В случае полной неисправности необходимо только направить механизм намотки в положение заведения нити, соответствующее полной неисправности. В случае частичной неисправности механизм намотки...
Устройство для подачи нити
Номер патента: 3562
Опубликовано: 30.09.2000
Авторы: ТОЛАНДЕР, Ларс Хельге Готтфрид, БЕРГМАН, Томас, ЙОХАНСОН, Эгон
МПК: B65H 51/22, B65H 51/16
Метки: устройство, подачи, нити
Текст:
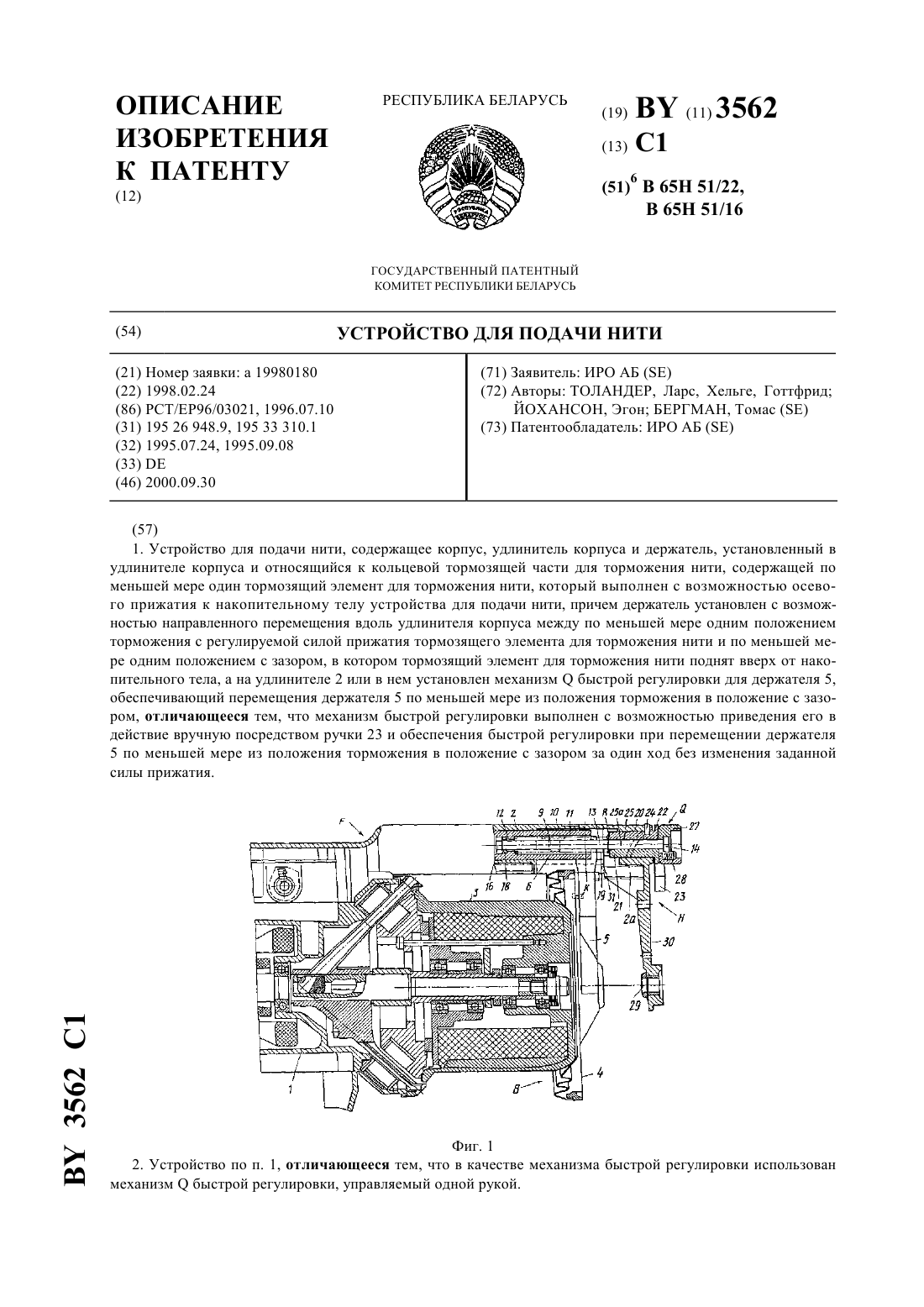
...выполняет регулирующую функцию. Механизм быстрой регулировки может содержать передаточную шестерню, снабженную зубьями, установленную в удлинителе с возможностью вращения вокруг оси, расположенной поперечно продольному направлению удлинителя, и взаимодействующую с противоположными зубцами указанной детали, присоединенной к держателю, предпочтительно регулирующей детали или регулирующего винта. Снабженная зубьями передаточная шестерня...
Устройство для подачи нити
Номер патента: 3563
Опубликовано: 30.09.2000
Авторы: ТОЛАНДЕР, Ларс Хельге Готтфрид, ЙОХАНСОН, Эгон, БЕРГМАН, Томас
МПК: B65H 51/22, B65H 51/16
Метки: устройство, нити, подачи
Текст:
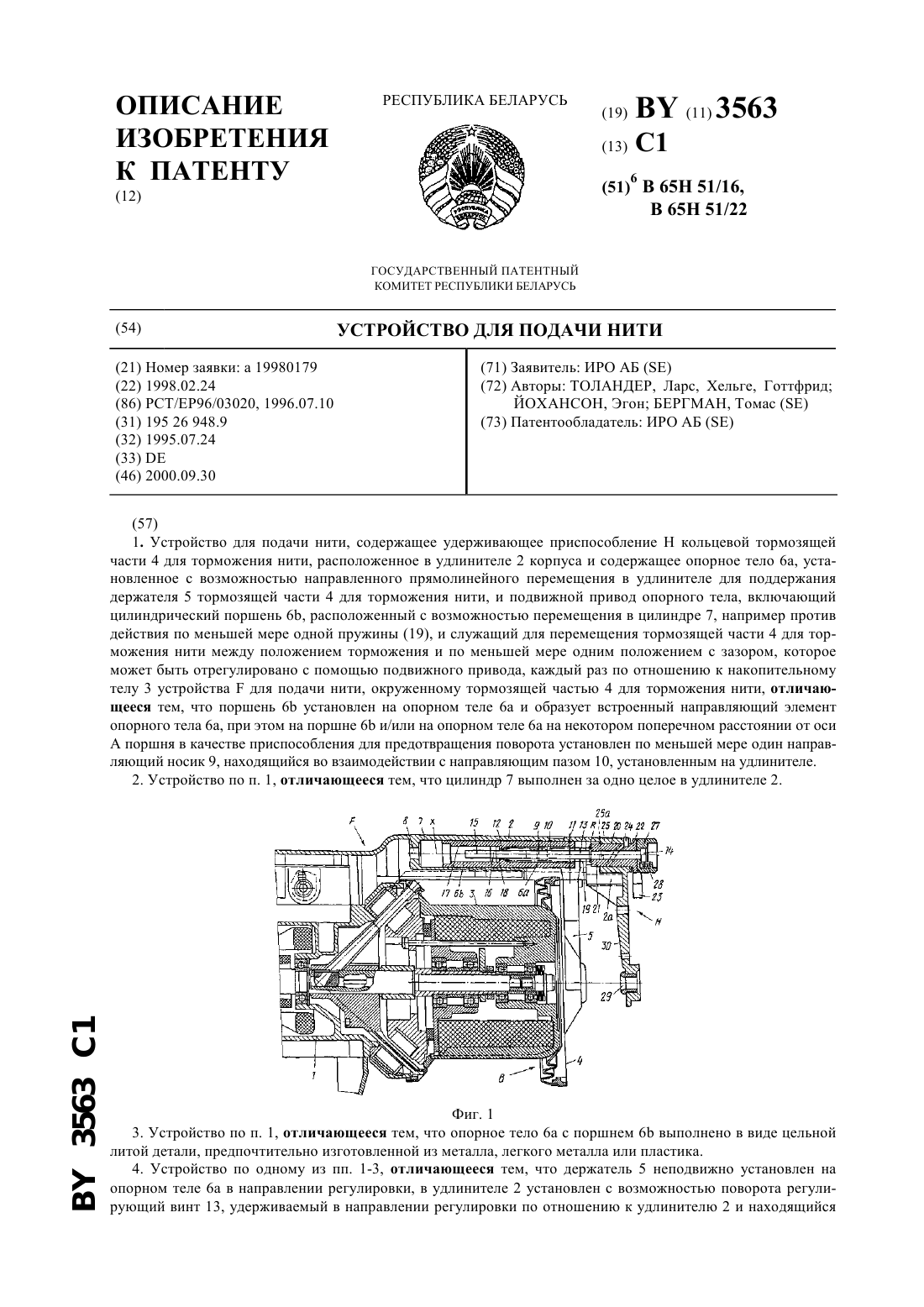
...Пружина может охватывать регулирующий винт и своим концом, обращенным от осевого упора, может упираться непосредственно в удлинитель или в регулирующую втулку, которая установлена с возможностью перемещения вручную в осевом направлении в удлинителе и в которой установлен регулирующий винт так,что его перемещение в осевом направлении предотвращено. В этом варианте выполнения возможно размещение длинной пружины, имеющей преимущества и не...
Аксиально-поршневой насос регулируемой подачи
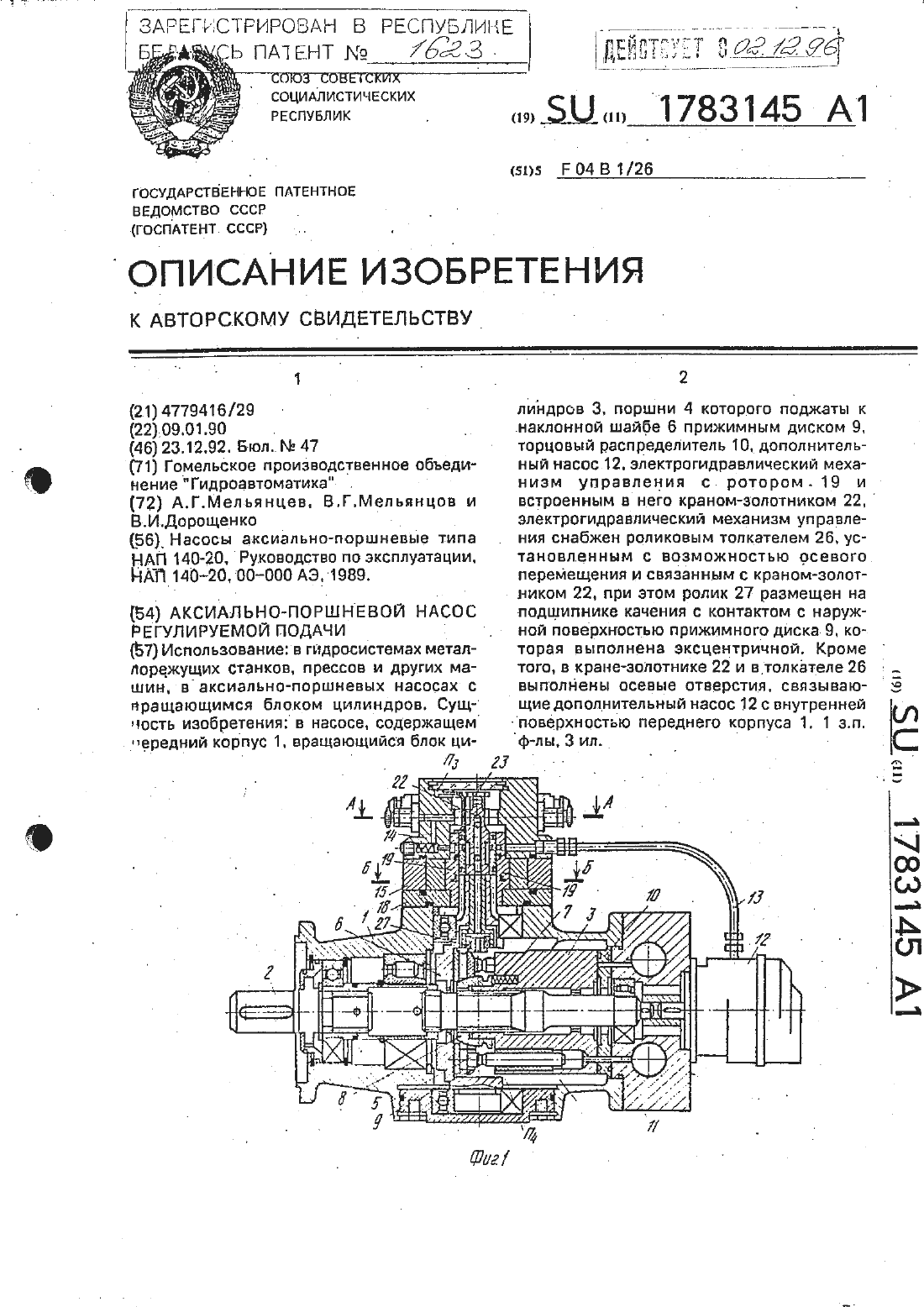
Номер патента: 1623
Опубликовано: 30.03.1997
Авторы: Дорощенко В. И., Мельянцев В. Г., Мельянцев А. Г.
МПК: F04B 1/26
Метки: аксиально-поршневой, насос, регулируемой, подачи
Текст:
...который содержит корпус 14 и корпус 15 с закрепленными на нем двумя сухарями 16 и П. фланец 18, ротор 19 с закрепленными на э-тем двумя лопастями 20 и 21. кран-золотник 22 с закрепленным на нем рычагом 23. поршни 24, пружины 25. толкатель 26 с установленным на подшипниках качения роликом 27. чНасос работает следующим образом.При вращении расположенного вдпереттельное движение под действием установленных на НИХ ПОДПЯТНИКОВ 5. прижатых К...
Предыдущий патент: Способ изготовления капиллярной структуры контурной тепловой трубы
Следующий патент: Электрозащитный пояс безопасности для систем индивидуальной защиты человека от поражения электрическим током
Случайный патент: Визирное устройство