Нагрузочное устройство
Номер патента: 16927
Опубликовано: 30.04.2013
Авторы: Дорощенко Игорь Владимирович, Захаренко Владимир Сергеевич, Савельев Вадим Алексеевич
Текст
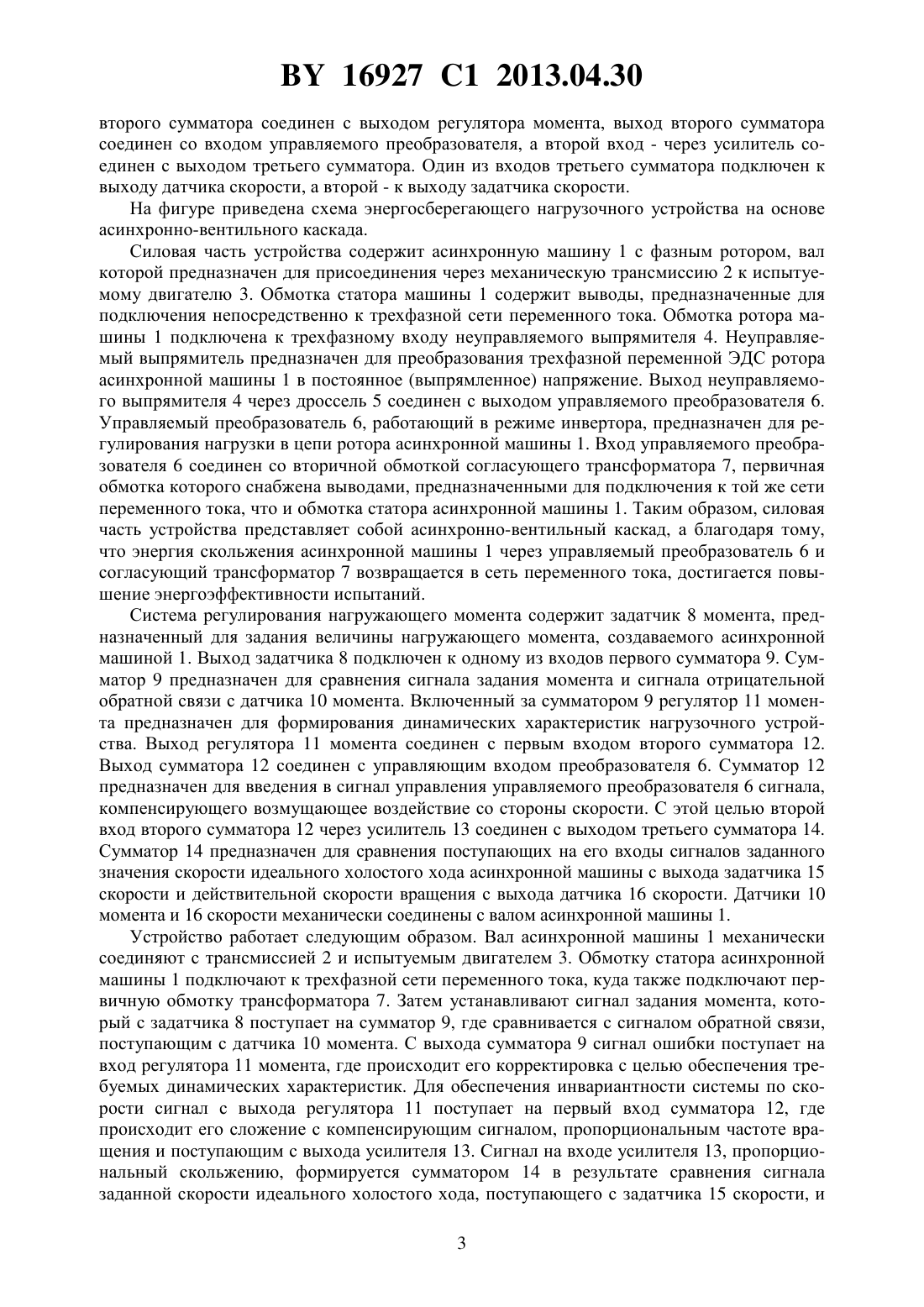
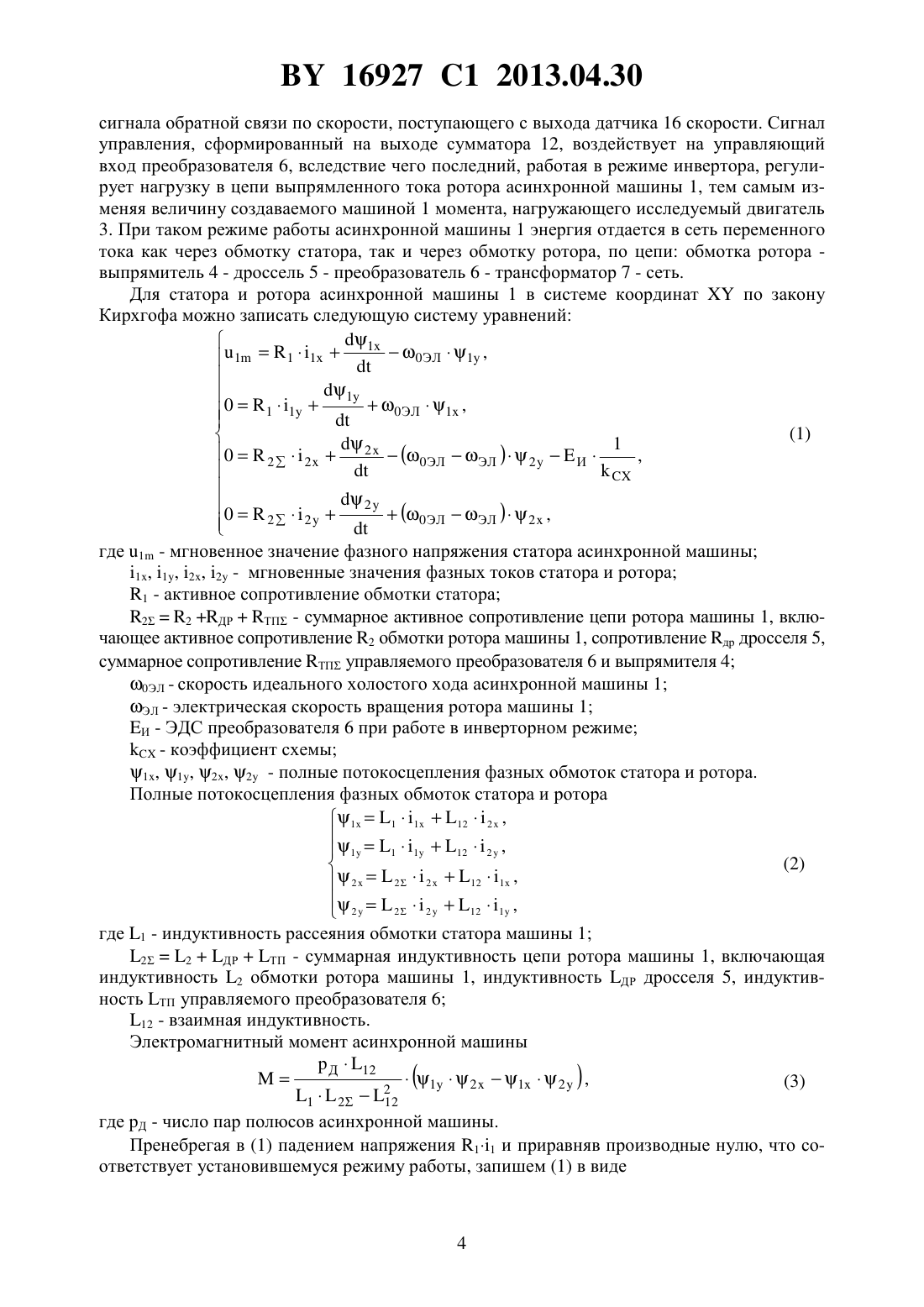
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Учреждение образования Гомельский государственный технический университет имени П.О.Сухого(72) Авторы Захаренко Владимир Сергеевич Дорощенко Игорь Владимирович Савельев Вадим Алексеевич(73) Патентообладатель Учреждение образования Гомельский государственный технический университет имени П.О.Сухого(57) Нагрузочное устройство, содержащее управляемый преобразователь с контуром регулирования момента, образованным регулятором момента, датчиком скорости, задатчиком момента, выходом соединенным с первым входом первого сумматора, второй вход которого соединен с выходом датчика момента, отличающееся тем, что содержит асинхронную машину с фазным ротором, неуправляемый выпрямитель, дроссель, согласующий трансформатор, второй сумматор, усилитель, третий сумматор и задатчик скорости, причем статорная обмотка асинхронной машины снабжена выводами для подключения непосредственно к трехфазной сети переменного тока, а обмотка ротора через неуправляемый выпрямитель и дроссель соединена с выходом управляемого преобразователя, первый вход которого соединен со вторичной обмоткой согласующего трансформатора, первичная обмотка которого снабжена выводами для подключения к упомянутой трехфазной сети, вал асинхронной машины механически соединен с датчиком момента и датчиком скорости и выполнен с возможностью механического соединения через механическую трансмиссию с валом нагружаемого двигателя, первый вход второго сумматора соединен 16927 1 2013.04.30 с выходом регулятора момента, вход которого соединен с выходом первого сумматора, выход второго сумматора соединен со вторым входом управляемого преобразователя, а второй вход через усилитель соединен с выходом третьего сумматора, первый вход которого соединен с выходом датчика скорости, а второй вход - с выходом задатчика скорости. Изобретение относится к области испытательной техники, а более конкретно к устройствам, имитирующим механическую нагрузку вращательного характера, и может быть использовано для испытаний различных систем приводов и механизмов. Не исключено также использование устройства в исследовательских и учебных целях. Известно устройство для управления системой нагружения испытательного стенда 1. Известное устройство содержит нагрузочный генератор постоянного тока, управляемый преобразователь, задатчик момента, сумматор, датчик тока, датчик скорости и регулятор момента. Однако в известном устройстве отсутствуют средства, обеспечивающие возможность возврата энергии в сеть или на приводной двигатель, что снижает энергоэффективность известного устройства. Это и является его основным недостатком. Кроме того, использование генератора постоянного тока снижает КПД устройства. Наиболее близким по совокупности признаков к заявляемому является устройство,содержащее управляемый преобразователь с контуром регулирования момента, образованным регулятором момента, датчиком скорости, задатчиком момента, выходом соединенным с первым входом первого сумматора, второй вход которого соединен с выходом датчика момента 2. Кроме того, известное устройство содержит последовательно включенные за сумматором блок деления и блок извлечения квадратного корня, выход которого подключен ко входу регулятора момента, один из входов блока деления соединен с выходом датчика скорости, а выход регулятора момента соединен со входом управляемого преобразователя. В известном нагрузочном устройстве также предусмотрена цепь возврата энергии по схеме взаимной нагрузки. Недостатком этого устройства также является низкий КПД, обусловленный необходимостью использования двух машин постоянного тока. Кроме того, обеспечение возможности возврата энергии на приводной двигатель требует управления по цепи возбуждения нагрузочного генератора, что снижает динамические показатели устройства и усложняет его конструкцию. Задачей настоящего изобретения является повышение энергоэффективности нагрузочных испытаний при одновременном обеспечении инвариантности момента сопротивления нагрузочного устройства по отношению к скорости во всем диапазоне нагрузок. Данная задача решается тем, что в известном устройстве, содержащем управляемый преобразователь с контуром регулирования момента, образованным регулятором момента,датчиком скорости, задатчиком момента, выходом соединенным с первым входом первого сумматора, второй вход которого соединен с выходом датчика момента, согласно изобретению, в качестве нагрузочного генератора использована асинхронная машина с фазным ротором. Вал асинхронной машины, механически соединенный с датчиком момента и датчиком скорости, предназначен для присоединения к трансмиссии и к валу испытуемого двигателя. Обмотка статора асинхронной машины снабжена выводами для подключения непосредственно к трехфазной сети переменного тока, а обмотка ротора через неуправляемый выпрямитель и дроссель соединена с управляемым преобразователем. Последний через согласующий трансформатор подключается к той же сети, что и обмотка статора асинхронной машины, образуя асинхронно-вентильный каскад, что позволяет возвращать энергию скольжения асинхронной машины назад в сеть, тем самым повышая энергоэффективность нагрузочных испытаний. Кроме того, с целью обеспечения инвариантности момента сопротивления нагрузочного устройства по отношению к скорости, первый вход 2 16927 1 2013.04.30 второго сумматора соединен с выходом регулятора момента, выход второго сумматора соединен со входом управляемого преобразователя, а второй вход - через усилитель соединен с выходом третьего сумматора. Один из входов третьего сумматора подключен к выходу датчика скорости, а второй - к выходу задатчика скорости. На фигуре приведена схема энергосберегающего нагрузочного устройства на основе асинхронно-вентильного каскада. Силовая часть устройства содержит асинхронную машину 1 с фазным ротором, вал которой предназначен для присоединения через механическую трансмиссию 2 к испытуемому двигателю 3. Обмотка статора машины 1 содержит выводы, предназначенные для подключения непосредственно к трехфазной сети переменного тока. Обмотка ротора машины 1 подключена к трехфазному входу неуправляемого выпрямителя 4. Неуправляемый выпрямитель предназначен для преобразования трехфазной переменной ЭДС ротора асинхронной машины 1 в постоянное (выпрямленное) напряжение. Выход неуправляемого выпрямителя 4 через дроссель 5 соединен с выходом управляемого преобразователя 6. Управляемый преобразователь 6, работающий в режиме инвертора, предназначен для регулирования нагрузки в цепи ротора асинхронной машины 1. Вход управляемого преобразователя 6 соединен со вторичной обмоткой согласующего трансформатора 7, первичная обмотка которого снабжена выводами, предназначенными для подключения к той же сети переменного тока, что и обмотка статора асинхронной машины 1. Таким образом, силовая часть устройства представляет собой асинхронно-вентильный каскад, а благодаря тому,что энергия скольжения асинхронной машины 1 через управляемый преобразователь 6 и согласующий трансформатор 7 возвращается в сеть переменного тока, достигается повышение энергоэффективности испытаний. Система регулирования нагружающего момента содержит задатчик 8 момента, предназначенный для задания величины нагружающего момента, создаваемого асинхронной машиной 1. Выход задатчика 8 подключен к одному из входов первого сумматора 9. Сумматор 9 предназначен для сравнения сигнала задания момента и сигнала отрицательной обратной связи с датчика 10 момента. Включенный за сумматором 9 регулятор 11 момента предназначен для формирования динамических характеристик нагрузочного устройства. Выход регулятора 11 момента соединен с первым входом второго сумматора 12. Выход сумматора 12 соединен с управляющим входом преобразователя 6. Сумматор 12 предназначен для введения в сигнал управления управляемого преобразователя 6 сигнала,компенсирующего возмущающее воздействие со стороны скорости. С этой целью второй вход второго сумматора 12 через усилитель 13 соединен с выходом третьего сумматора 14. Сумматор 14 предназначен для сравнения поступающих на его входы сигналов заданного значения скорости идеального холостого хода асинхронной машины с выхода задатчика 15 скорости и действительной скорости вращения с выхода датчика 16 скорости. Датчики 10 момента и 16 скорости механически соединены с валом асинхронной машины 1. Устройство работает следующим образом. Вал асинхронной машины 1 механически соединяют с трансмиссией 2 и испытуемым двигателем 3. Обмотку статора асинхронной машины 1 подключают к трехфазной сети переменного тока, куда также подключают первичную обмотку трансформатора 7. Затем устанавливают сигнал задания момента, который с задатчика 8 поступает на сумматор 9, где сравнивается с сигналом обратной связи,поступающим с датчика 10 момента. С выхода сумматора 9 сигнал ошибки поступает на вход регулятора 11 момента, где происходит его корректировка с целью обеспечения требуемых динамических характеристик. Для обеспечения инвариантности системы по скорости сигнал с выхода регулятора 11 поступает на первый вход сумматора 12, где происходит его сложение с компенсирующим сигналом, пропорциональным частоте вращения и поступающим с выхода усилителя 13. Сигнал на входе усилителя 13, пропорциональный скольжению, формируется сумматором 14 в результате сравнения сигнала заданной скорости идеального холостого хода, поступающего с задатчика 15 скорости, и 3 16927 1 2013.04.30 сигнала обратной связи по скорости, поступающего с выхода датчика 16 скорости. Сигнал управления, сформированный на выходе сумматора 12, воздействует на управляющий вход преобразователя 6, вследствие чего последний, работая в режиме инвертора, регулирует нагрузку в цепи выпрямленного тока ротора асинхронной машины 1, тем самым изменяя величину создаваемого машиной 1 момента, нагружающего исследуемый двигатель 3. При таком режиме работы асинхронной машины 1 энергия отдается в сеть переменного тока как через обмотку статора, так и через обмотку ротора, по цепи обмотка ротора выпрямитель 4 - дроссель 5 - преобразователь 6 - трансформатор 7 - сеть. Для статора и ротора асинхронной машины 1 в системе координатпо закону Кирхгофа можно записать следующую систему уравнений 1 где 1 - мгновенное значение фазного напряжения статора асинхронной машины 1, 1, 2, 2 - мгновенные значения фазных токов статора и ротора 1 - активное сопротивление обмотки статора 22 ДРТП - суммарное активное сопротивление цепи ротора машины 1, включающее активное сопротивление 2 обмотки ротора машины 1, сопротивление др дросселя 5,суммарное сопротивление ТП управляемого преобразователя 6 и выпрямителя 4 0 ЭЛ - скорость идеального холостого хода асинхронной машины 1 ЭЛ - электрическая скорость вращения ротора машины 1 И - ЭДС преобразователя 6 при работе в инверторном режиме- коэффициент схемы 1, 1, 2, 2 - полные потокосцепления фазных обмоток статора и ротора. Полные потокосцепления фазных обмоток статора и ротора 111122,,1 1 12 21 222121 , 222121 , где 1 - индуктивность рассеяния обмотки статора машины 1 22 ДРТП - суммарная индуктивность цепи ротора машины 1, включающая индуктивность 2 обмотки ротора машины 1, индуктивность ДР дросселя 5, индуктивность ТП управляемого преобразователя 6 12 - взаимная индуктивность. Электромагнитный момент асинхронной машиныД 12 1212,(3) 122 12 где Д - число пар полюсов асинхронной машины. Пренебрегая в (1) падением напряжения 11 и приравняв производные нулю, что соответствует установившемуся режиму работы, запишем (1) в виде(7) 1 Из четвертого уравнения (4) с учетом второго и четвертого уравнений (5) запишем ток 2 в виде 1 1 1(0 ЭЛЭЛ )12 И Тогда с учетом (8) после несложных преобразований уравнение момента (6) примет вид 2 Д 12 Д 2 1(9) 12 0 ЭЛ 0 ЭЛ 21 Как видно из (9), для обеспечения инвариантности нагрузочного устройства по скорости вращения достаточно установить коэффициент передачи усилителя 13 равным 2 Д 21 2 . 12 0 ЭЛ Таким образом, заявляемое устройство, по сравнению с известным, обеспечивает следующие преимущества повышение энергоэффективности гагрузочных испытаний за счет применения асинхронной машины, включенной по схеме асинхронно-вентильного каскада повышение качества испытаний за счет обеспечения инвариантности во всем диапазоне нагрузок при общей простоте схемной реализации.2 1. Патент РБ 5694. 2. Патент РБ 5370. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G01M 15/00
Метки: устройство, нагрузочное
Код ссылки
<a href="https://by.patents.su/5-16927-nagruzochnoe-ustrojjstvo.html" rel="bookmark" title="База патентов Беларуси">Нагрузочное устройство</a>
Нагрузочное устройство для испытания электроприводов
Номер патента: 4900
Опубликовано: 30.12.2002
Авторы: Пархоменко Александр Георгиевич, Геращенко Василий Васильевич, Серков Александр Владимирович, Левшуков Николай Николаевич, Башаримова Валентина Николаевна
МПК: G01R 31/34
Метки: устройство, электроприводов, нагрузочное, испытания
Текст:
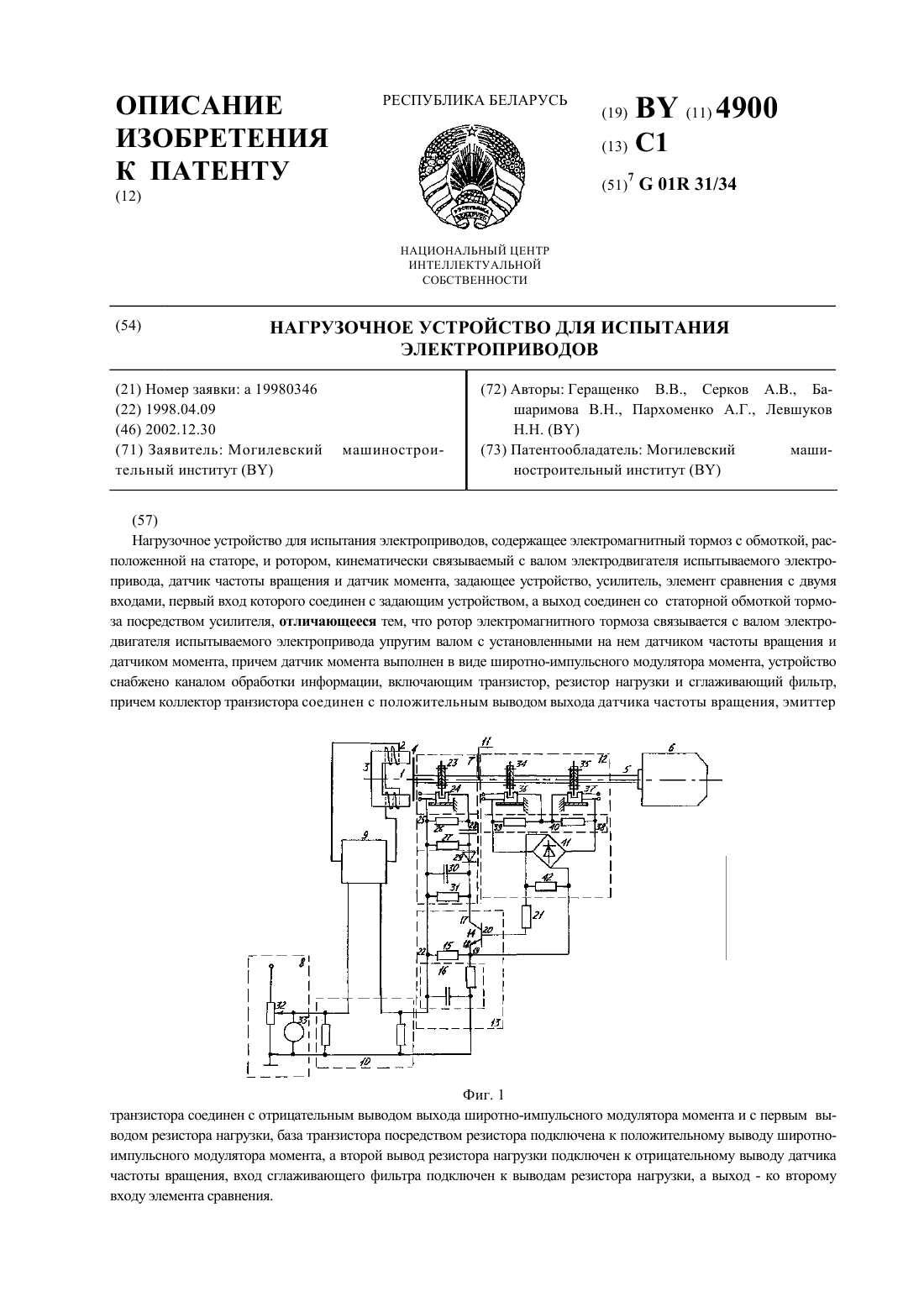
...устройства для испытания электроприводов на фиг. 2 сигналы на входе дифференцирующей цепи 25 на фиг. 3 - сигналы на выходе дифференцирующей цепи 25 на фиг. 4 - сигналы на выходе диода 29 на фиг. 5 - сигналы на выходе датчика 7 частоты вращения на фиг. 6- сигналы на резисторе 40 на фиг. 7 - сигналы на резисторе 39 на фиг. 8 - сигналы на выходе вычитающего элемента 38 на фиг. 9 - сигналы на выходе диодного моста 41 на фиг. 10 - сигналы на...
Устройство для управления системой нагружения испытательного стенда
Номер патента: 5370
Опубликовано: 30.09.2003
Авторы: Савельев Вадим Алексеевич, Луковников Вадим Иванович, Захаренко Владимир Сергеевич, Захаренко Сергей Иванович
МПК: H04R 29/00, H02P 5/00
Метки: управления, нагружения, стенда, системой, испытательного, устройство
Текст:
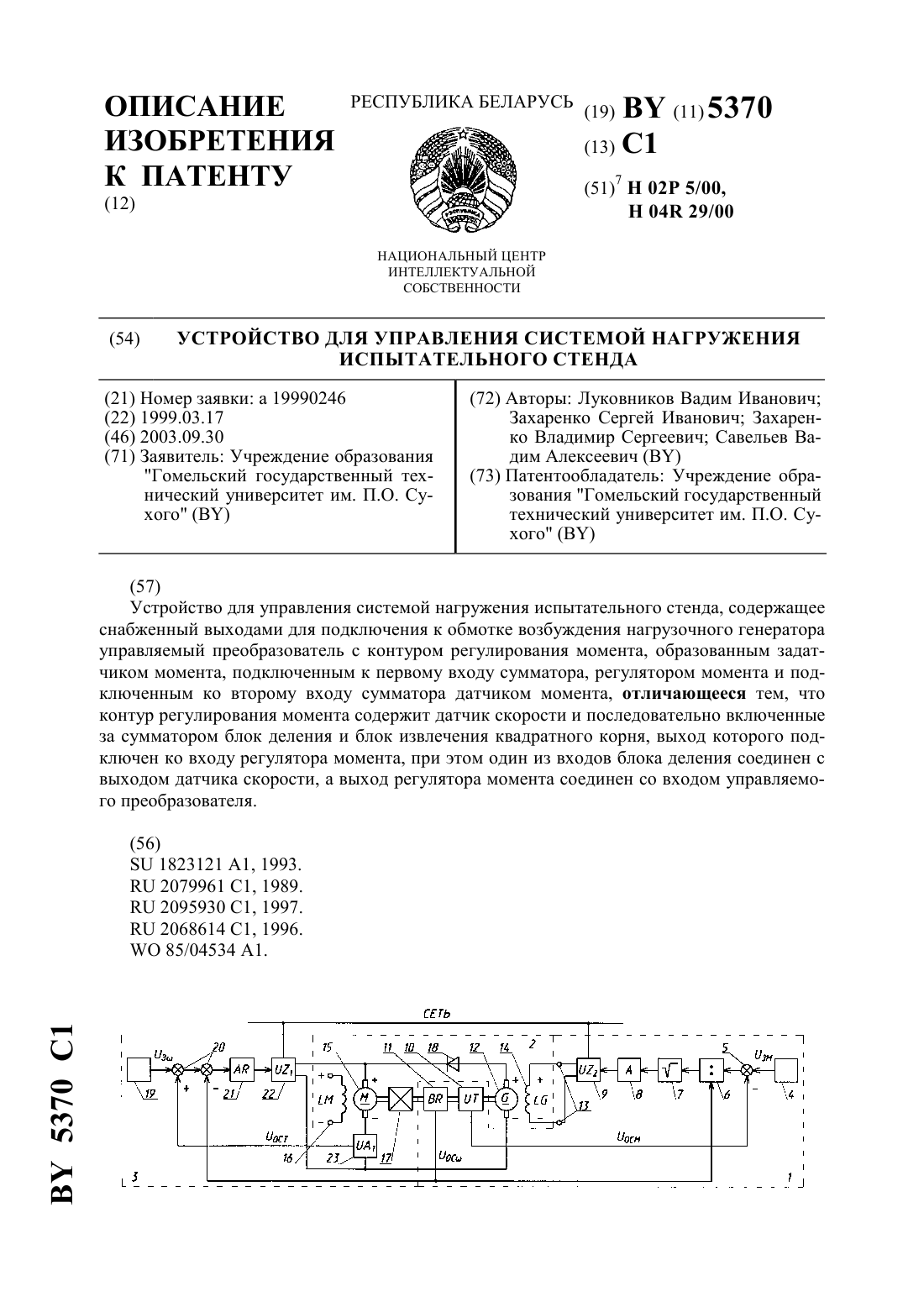
...для управления системой нагружения, электромеханическим преобразователем и системой управления приводным двигателем. Устройство 1 для управления системой нагружения испытательного стенда, функционально связанное с электромеханическим преобразователем 2 и системой 3 управления приводным двигателем, содержит задатчик момента 4, сумматор 5, блок деления 6, блок извлечения квадратного корня 7, регулятор момента 8, управляемый преобразователь...
Устройсво для управления системой нагружения испытательного стенда
Номер патента: 5694
Опубликовано: 30.12.2003
Авторы: Захаренко Владимир Сергеевич, Савельев Вадим Алексеевич, Луковников Вадим Иванович, Захаренко Сергей Иванович
МПК: H04R 29/00, H02P 5/00
Метки: стенда, управления, нагружения, устройсво, системой, испытательного
Текст:
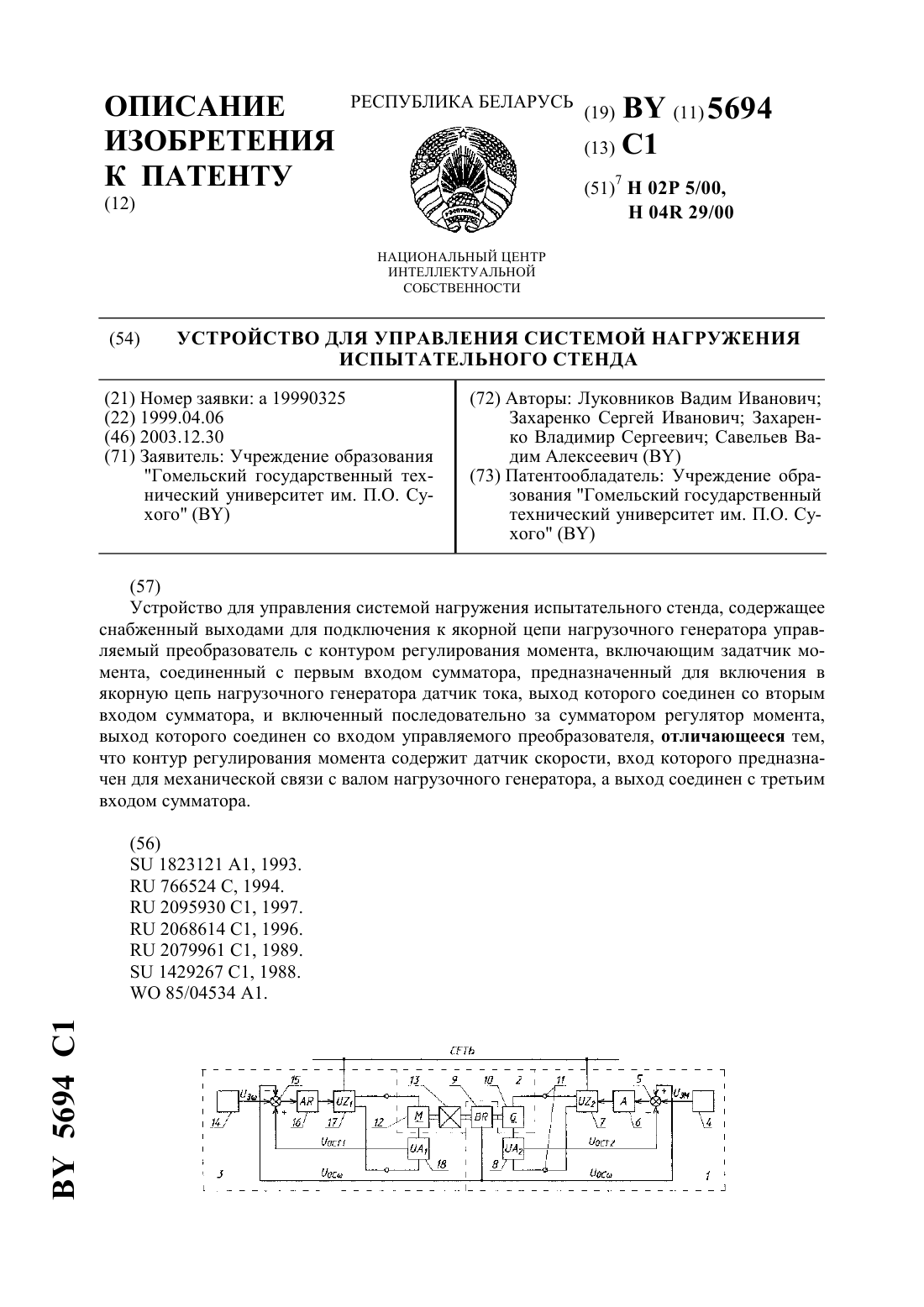
...испытательного стенда с устройством для управления системой нагружения, электромеханическим преобразователем и системой управления приводным двигателем. Устройство 1 для управления системой нагружения испытательного стенда, функционально связанное с электромеханическим преобразователем 2 и системой 3 управления приводным двигателем, содержит задатчик момента 4, сумматор 5, регулятор момента 6,управляемый преобразователь 7, датчик тока 8 и...
Асинхронная машина
Номер патента: 4152
Опубликовано: 30.12.2001
Авторы: Альховка Дмитрий Валерьевич, Кравченко Александр Маисеевич, Лузин Владимир Михайлович, Самуйлов Евгений Михайлович, Яковлев Геннадий Васильевич
МПК: H02K 17/20, H02K 17/12
Метки: машина, асинхронная
Текст:
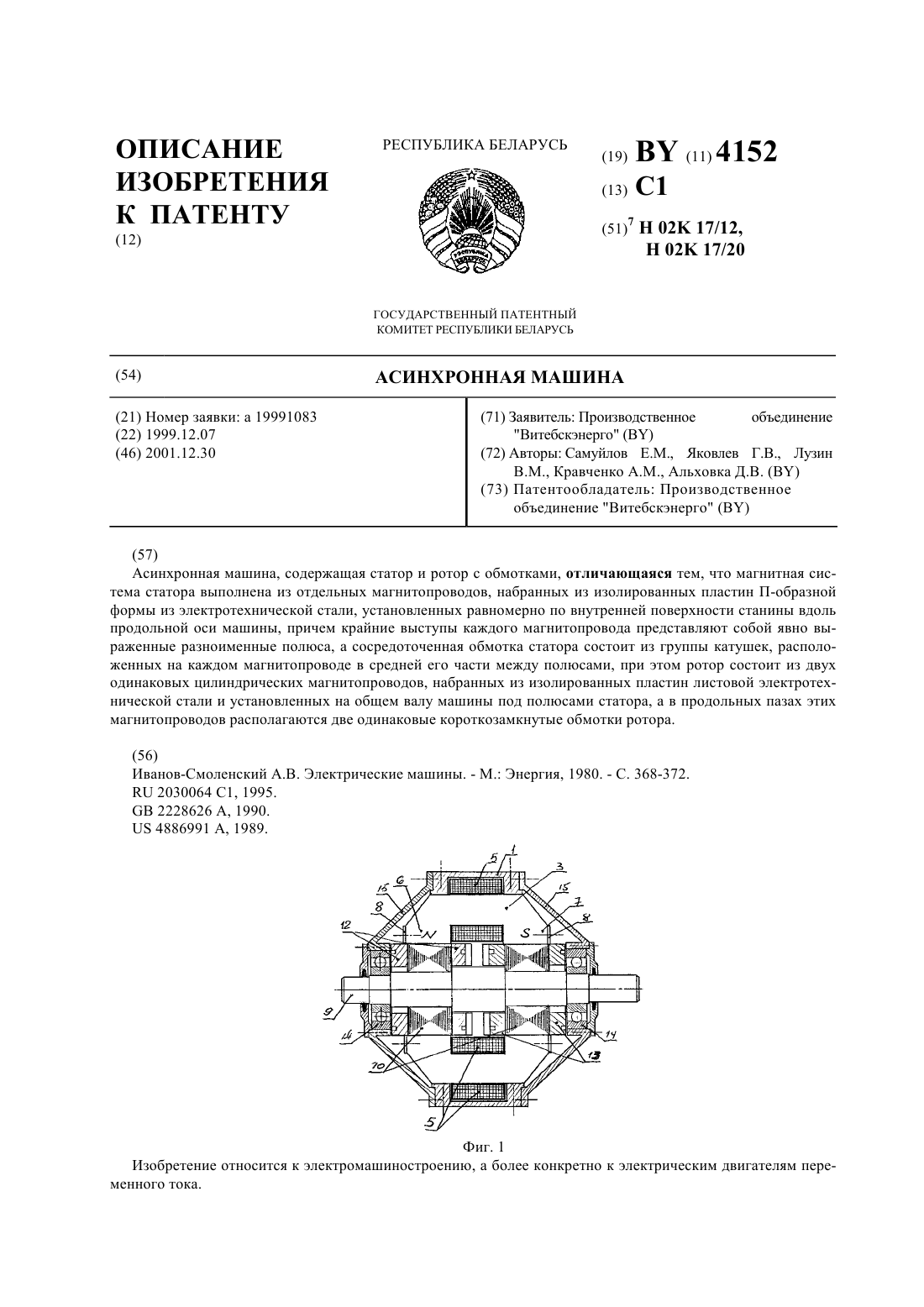
...на каждом магнитопроводе в средней его части между полюсами, при этом ротор состоит из двух одинаковых цилиндрических магнитопроводов, набранных из изолированных пластин листовой электротехнической стали и установленных на общем валу машины под полюсами статора, при этом в продольных пазах этих магнитопроводов располагаются две одинаковые короткозамкнутые обмотки ротора. Н фиг. 1 и 2 показан один из вариантов исполнения заявляемой...
Устройство для регулирования возбуждения синхронной машины
Номер патента: 13305
Опубликовано: 30.06.2010
Авторы: Калентионок Евгений Васильевич, Филипчик Юрий Дмитриевич
Метки: возбуждения, регулирования, устройство, синхронной, машины
Текст:
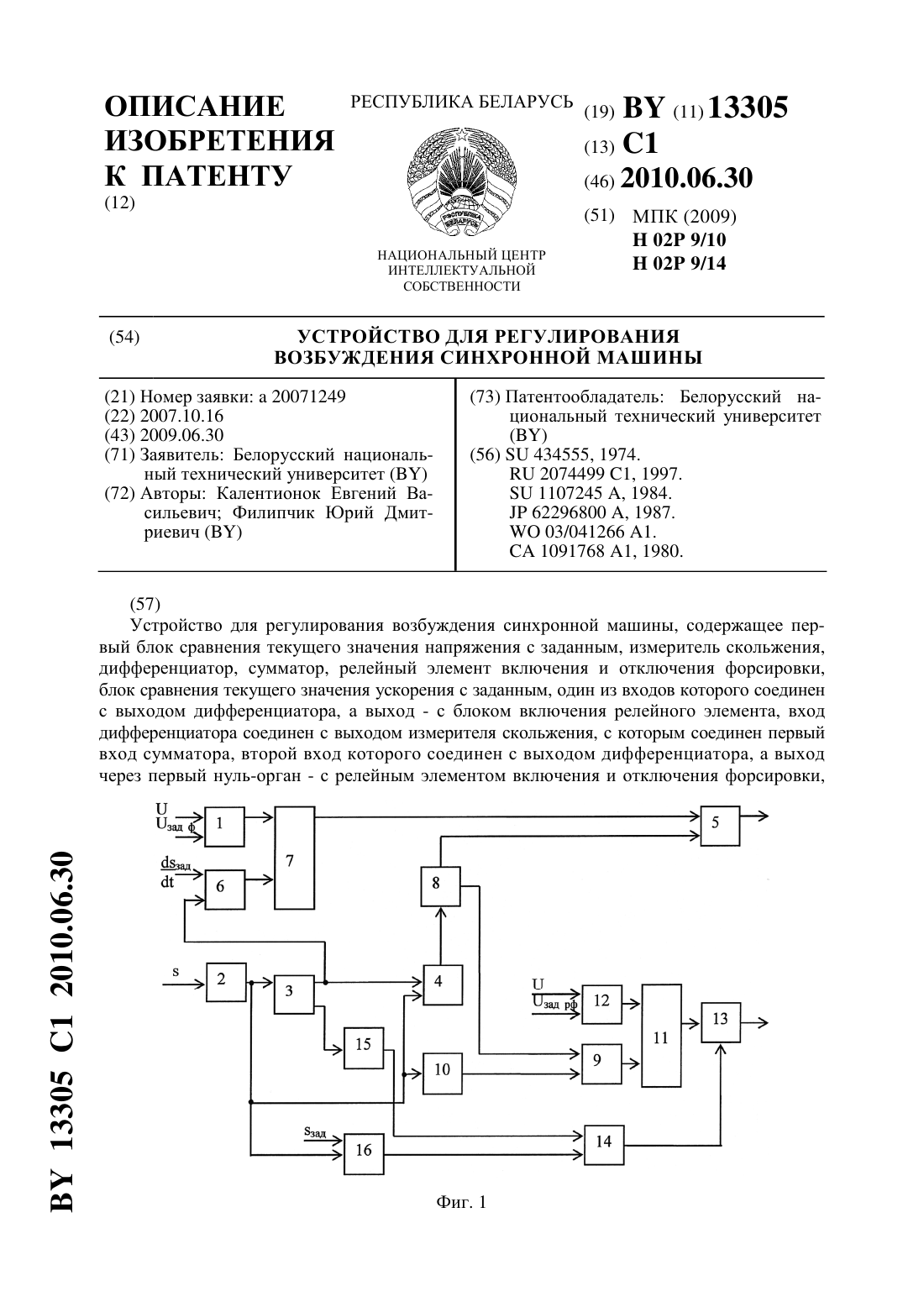
...один из входов которого подключен к выходу дифференциатора 3, а выход - к блоку 7 включения релейного элемента. Вход дифференциатора 3 присоединен к выходу измерителя 2 скольжения, к которому подключен один из входов сумматора 4, второй вход которого соединен с выходом дифференциатора 3, а выход через нуль-орган 8 - с релейным элементом 5 включения и отключения форсировки. На первый вход элемента И 9 поступает выходной сигнал от...