Система управления сервоприводом
Номер патента: 13559
Опубликовано: 30.08.2010
Авторы: Гананайко Анатолий Степанович, Трусковский Александр Сергеевич, Леневич Валентин Петрович, Бутко Виктор Федорович
Текст
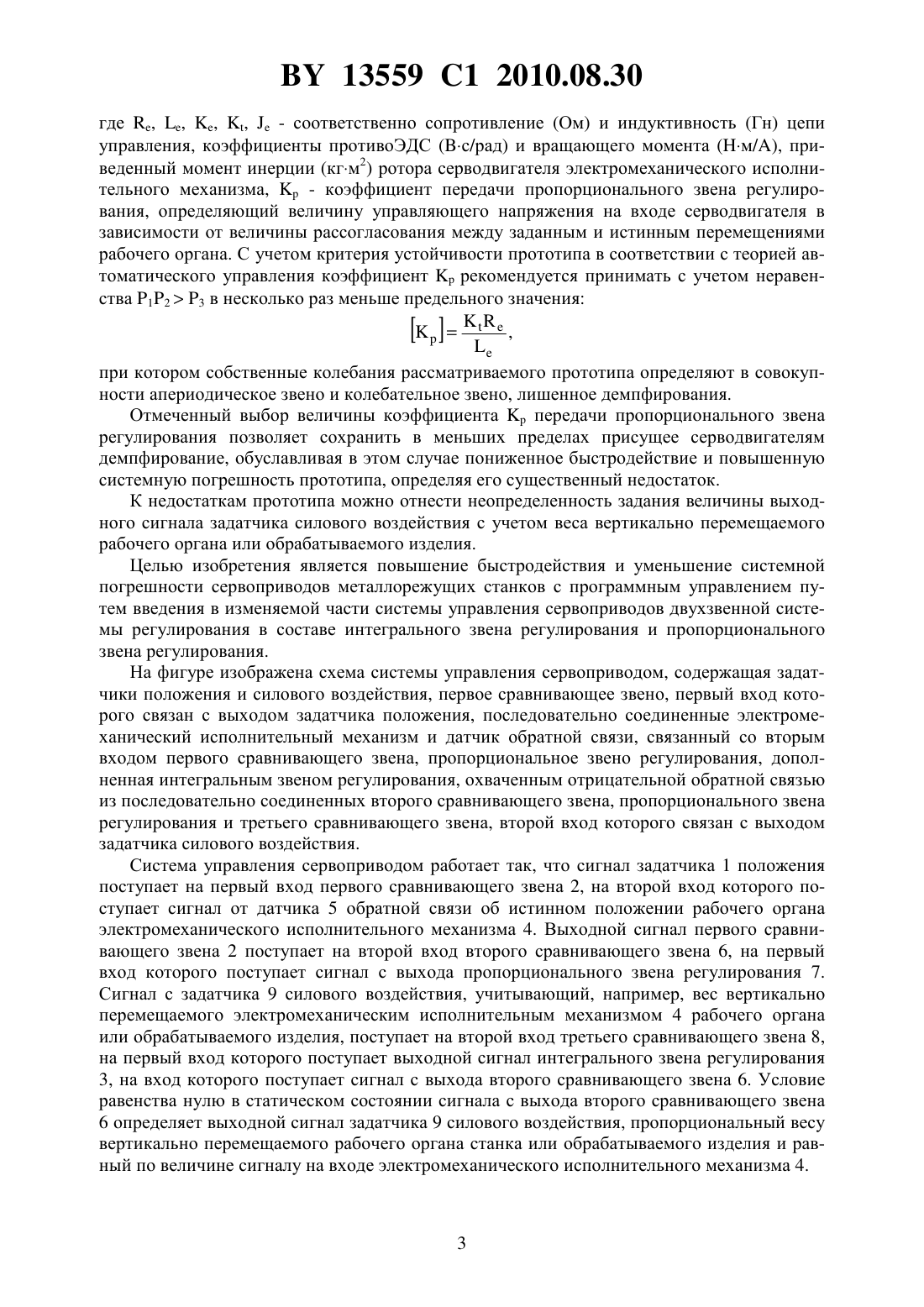
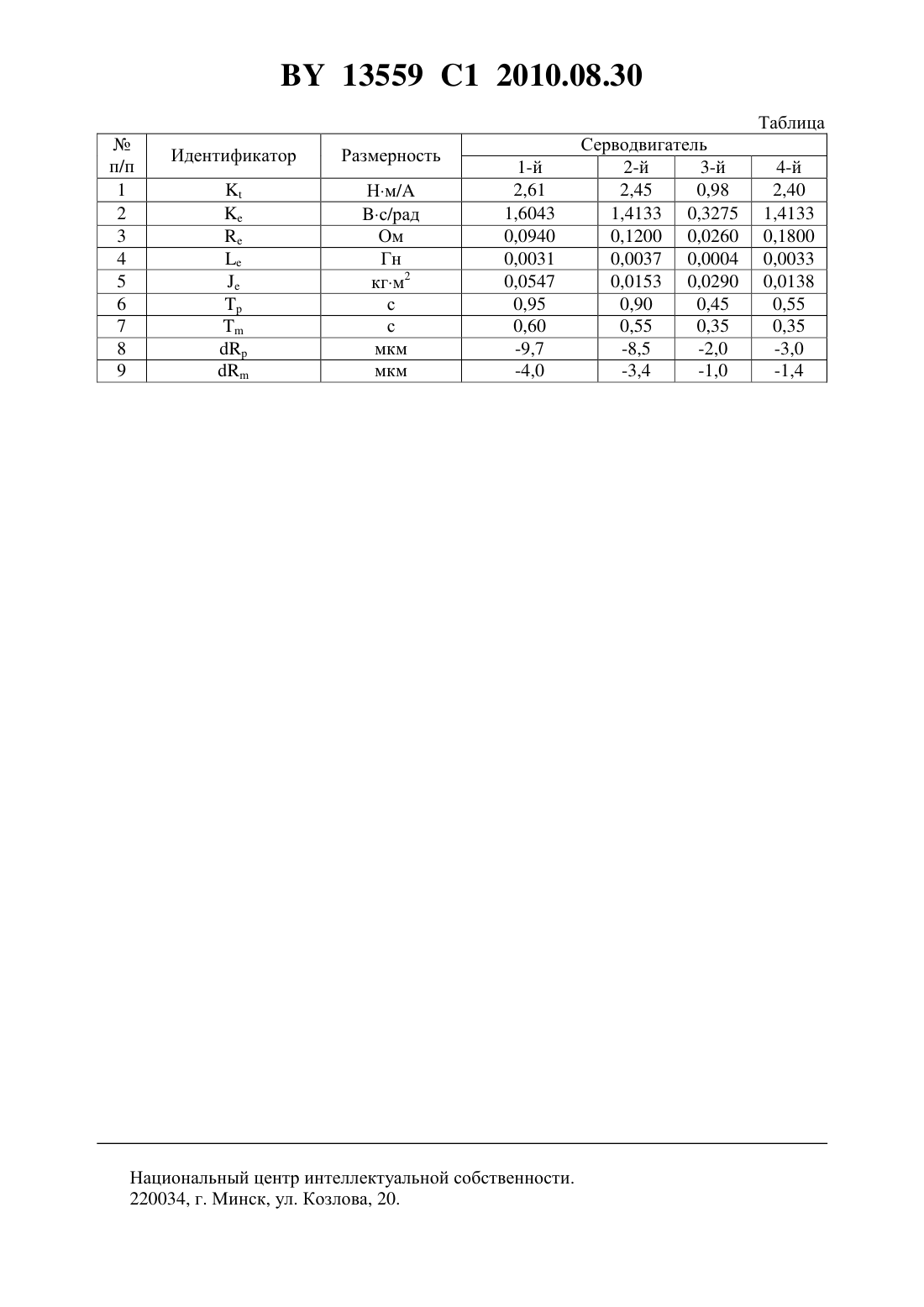
(51) МПК (2009) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Производственное республиканское унитарное предприятие МЗОР(72) Авторы Бутко Виктор Федорович Трусковский Александр Сергеевич Леневич Валентин Петрович Гананайко Анатолий Степанович(73) Патентообладатель Производственное республиканское унитарное предприятие МЗОР(57) Система управления сервоприводом, содержащая задатчики положения и силового воздействия, первое сравнивающее звено, первый вход которого связан с выходом задатчика положения, последовательно соединенные электромеханический исполнительный механизм и датчик обратной связи, связанный со вторым входом первого сравнивающего звена, пропорциональное звено регулирования, отличающаяся тем, что содержит дополнительное регулирующее звено, выполненное в виде интегрального звена регулирования,охваченного отрицательной обратной связью из последовательно соединенных второго сравнивающего звена, пропорционального звена регулирования и третьего сравнивающего звена, второй вход которого связан с выходом задатчика силового воздействия. 13559 1 2010.08.30 Изобретение относится к системам управления электромеханическими сервоприводами металлорежущих станков с программным управлением перемещениями рабочих органов станка и обрабатываемых изделий. В электромеханических сервоприводах металлорежущих станков с программным управлением принято использовать последовательно соединенные задатчик положения,сравнивающее звено, пропорциональное звено регулирования, электромеханический исполнительный механизм в составе электрического серводвигателя и механического исполнительного привода и датчик обратной связи, выходной сигнал которого о истинном перемещении рабочего органа станка с отрицательным значением поступает на второй вход сравнивающего звена отличный от нуля выходной сигнал сравнивающего звена, как величина, определяющая рассогласование между заданным и истинным перемещениями рабочего органа, предопределяет выработку пропорциональным звеном регулирования отличного от нуля управляющего сигнала, поступающего на вход электрического серводвигателя для устранения имеющего место рассогласования. Из теории автоматического управления известно, что использование пропорционального звена регулирования в системе управления электромеханическими сервоприводами обеспечивает в статике нулевое рассогласование между заданным и истинным перемещениями рабочих органов. Состояние электромеханического сервопривода металлорежущих станков с программным управлением в динамике характеризует отличная от нуля величина рассогласования между заданным и истинным перемещениями рабочих органов. Стандарт ИСО 230/4-86 регламентирует количественное отклонение круговых траекторий для станков с ЧПУ в динамике при различных скоростях обхода и радиусах круговых траекторий, определяя системную погрешность двух сервоприводов с взаимно ортогональными перемещениями рабочих органов с учетом системы СПИД в составе станокприспособлениеинструментдеталь. В качестве прототипа принимаем систему управления(-611 /611 /6.1 /1.1 /-/03 / 14), в состав которой входят задатчики положения и силового воздействия, сравнивающее звено, первый вход которого связан с выходом задатчика положения, последовательно соединенные электромеханический исполнительный механизм и датчик обратной связи, связанный со вторым входом сравнивающего звена, пропорциональное звено регулирования. Система управленияотносится к системам управления с обратной связью, в которых подаваемое пропорциональным звеном регулирования на вход электродвигателя напряжение пропорционально величине рассогласования между заданным и истинным перемещениями рабочего органа в предпосылке, что отсутствие рассогласования между заданным и истинным перемещениями рабочего органа определяет нулевое по величине управляющее напряжение электрическим серводвигателем. Соотношение в прототипе истинного перемещения рабочего органа и заданного перемещения определяет передаточная функция 33 13559 1 2010.08.30 где , , , ,- соответственно сопротивление (Ом) и индуктивность (Гн) цепи управления, коэффициенты противоЭДС (с/рад) и вращающего момента (м/), приведенный момент инерции (кгм 2) ротора серводвигателя электромеханического исполнительного механизма,- коэффициент передачи пропорционального звена регулирования, определяющий величину управляющего напряжения на входе серводвигателя в зависимости от величины рассогласования между заданным и истинным перемещениями рабочего органа. С учетом критерия устойчивости прототипа в соответствии с теорией автоматического управления коэффициентрекомендуется принимать с учетом неравенства 123 в несколько раз меньше предельного значения, при котором собственные колебания рассматриваемого прототипа определяют в совокупности апериодическое звено и колебательное звено, лишенное демпфирования. Отмеченный выбор величины коэффициентапередачи пропорционального звена регулирования позволяет сохранить в меньших пределах присущее серводвигателям демпфирование, обуславливая в этом случае пониженное быстродействие и повышенную системную погрешность прототипа, определяя его существенный недостаток. К недостаткам прототипа можно отнести неопределенность задания величины выходного сигнала задатчика силового воздействия с учетом веса вертикально перемещаемого рабочего органа или обрабатываемого изделия. Целью изобретения является повышение быстродействия и уменьшение системной погрешности сервоприводов металлорежущих станков с программным управлением путем введения в изменяемой части системы управления сервоприводов двухзвенной системы регулирования в составе интегрального звена регулирования и пропорционального звена регулирования. На фигуре изображена схема системы управления сервоприводом, содержащая задатчики положения и силового воздействия, первое сравнивающее звено, первый вход которого связан с выходом задатчика положения, последовательно соединенные электромеханический исполнительный механизм и датчик обратной связи, связанный со вторым входом первого сравнивающего звена, пропорциональное звено регулирования, дополненная интегральным звеном регулирования, охваченным отрицательной обратной связью из последовательно соединенных второго сравнивающего звена, пропорционального звена регулирования и третьего сравнивающего звена, второй вход которого связан с выходом задатчика силового воздействия. Система управления сервоприводом работает так, что сигнал задатчика 1 положения поступает на первый вход первого сравнивающего звена 2, на второй вход которого поступает сигнал от датчика 5 обратной связи об истинном положении рабочего органа электромеханического исполнительного механизма 4. Выходной сигнал первого сравнивающего звена 2 поступает на второй вход второго сравнивающего звена 6, на первый вход которого поступает сигнал с выхода пропорционального звена регулирования 7. Сигнал с задатчика 9 силового воздействия, учитывающий, например, вес вертикально перемещаемого электромеханическим исполнительным механизмом 4 рабочего органа или обрабатываемого изделия, поступает на второй вход третьего сравнивающего звена 8,на первый вход которого поступает выходной сигнал интегрального звена регулирования 3, на вход которого поступает сигнал с выхода второго сравнивающего звена 6. Условие равенства нулю в статическом состоянии сигнала с выхода второго сравнивающего звена 6 определяет выходной сигнал задатчика 9 силового воздействия, пропорциональный весу вертикально перемещаемого рабочего органа станка или обрабатываемого изделия и равный по величине сигналу на входе электромеханического исполнительного механизма 4. 13559 1 2010.08.30 В системе управления сервоприводом соотношение истинного перемещения рабочего органа электромеханического исполнительного механизма 4 и заданного задатчиком 1 перемещения определяет передаточная функция 44 4, где ,- соответственно коэффициент, обратный постоянной времени интегрального звена регулирования 3, и коэффициент передачи пропорционального звена регулирования 7. В системе управления сервоприводом реализована концепция мобильного регулирования, согласно которой увеличение коэффициентаинтегрального звена регулирования 3 повышает быстродействие сервопривода, а увеличение коэффициента К пропорционального звена регулирования 7 повышает его демпфирующую способность. Оптимальное соотношение коэффициентови К с учетом приведенных зависимостей коэффициентов 1, 2 и 3 от коэффициента К должно подчиняться неравенству 3 33 2 1 11 Ниже в таблице приведены технические параметры , , ,ичетырех различных серводвигателей с номинальными моментами порядка 70 Нм и номинальной частотой вращения 2000 об/мин, расчетные величиныибыстродействия, определяющие время переходного процесса при повороте ротора серводвигателя на 180 из одного состояния покоя в другое соответственно при прототип-системе управления и системе управления сервоприводом, и величиныиотклонений радиуса круговой траектории,характеризующие сравнительную системную погрешность сервоприводов металлорежущих станков при обеих системах управления. Анализ приведенных в таблице величини , характеризующих быстродействие серводвигателей, и величини , характеризующих системную погрешность сервоприводов с программным управлением, при использовании различных серводвигателей показывает, что по сравнению с прототип-системой управления предложенная система управления сервоприводом повышает быстродействие серводвигателей и способствует уменьшению системной погрешности сервоприводов металлорежущих станков с программным управлением. Нм/ с/рад Ом Гн кгм 2 с с мкм мкм Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G05B 13/00, G05B 13/02
Метки: управления, сервоприводом, система
Код ссылки
<a href="https://by.patents.su/5-13559-sistema-upravleniya-servoprivodom.html" rel="bookmark" title="База патентов Беларуси">Система управления сервоприводом</a>
Система автоматического управления
Номер патента: 10613
Опубликовано: 30.06.2008
Автор: Опейко Ольга Федоровна
МПК: G05B 13/02
Метки: система, автоматического, управления
Текст:
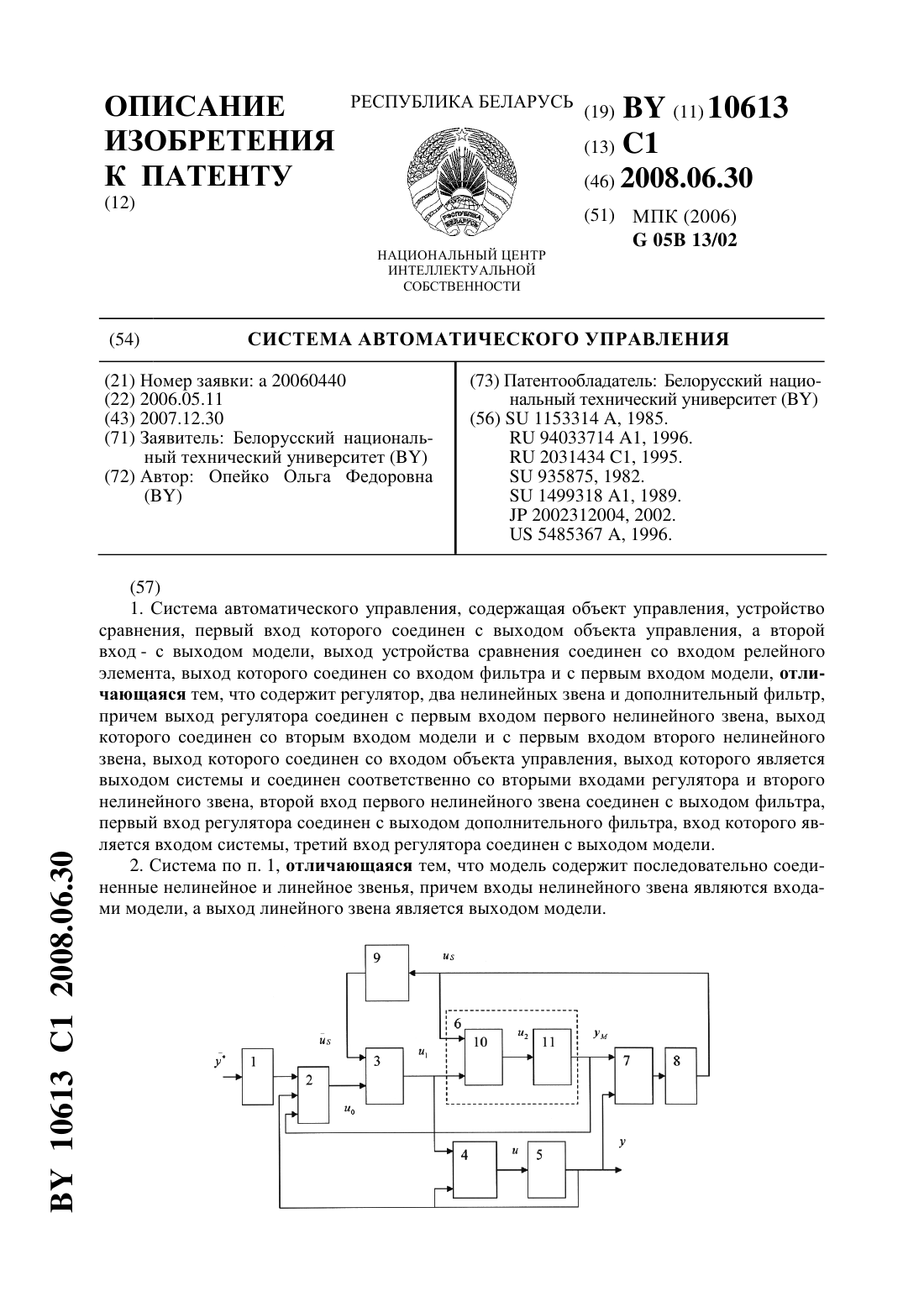
...звена, второй вход первого нелинейного звена соединен с выходом фильтра, первый вход регулятора соединен с выходом дополнительного фильтра, вход которого является входом системы, третий вход регулятора соединен с выходом модели. Модель содержит последовательно соединенные нелинейное и линейное звенья, причем входы нелинейного звена являются входами модели, а выход линейного звена является выходом модели. 10613 1 2008.06.30 В предлагаемом...
Следящая система автоматического управления с компенсацией неизмеряемых скачкообразных возмущений
Номер патента: U 1002
Опубликовано: 30.09.2003
Авторы: Ганэ Вадим Арведович, Мацкевич Артур Николаевич
МПК: G05B 11/01
Метки: автоматического, неизмеряемых, возмущений, компенсацией, следящая, система, управления, скачкообразных
Текст:
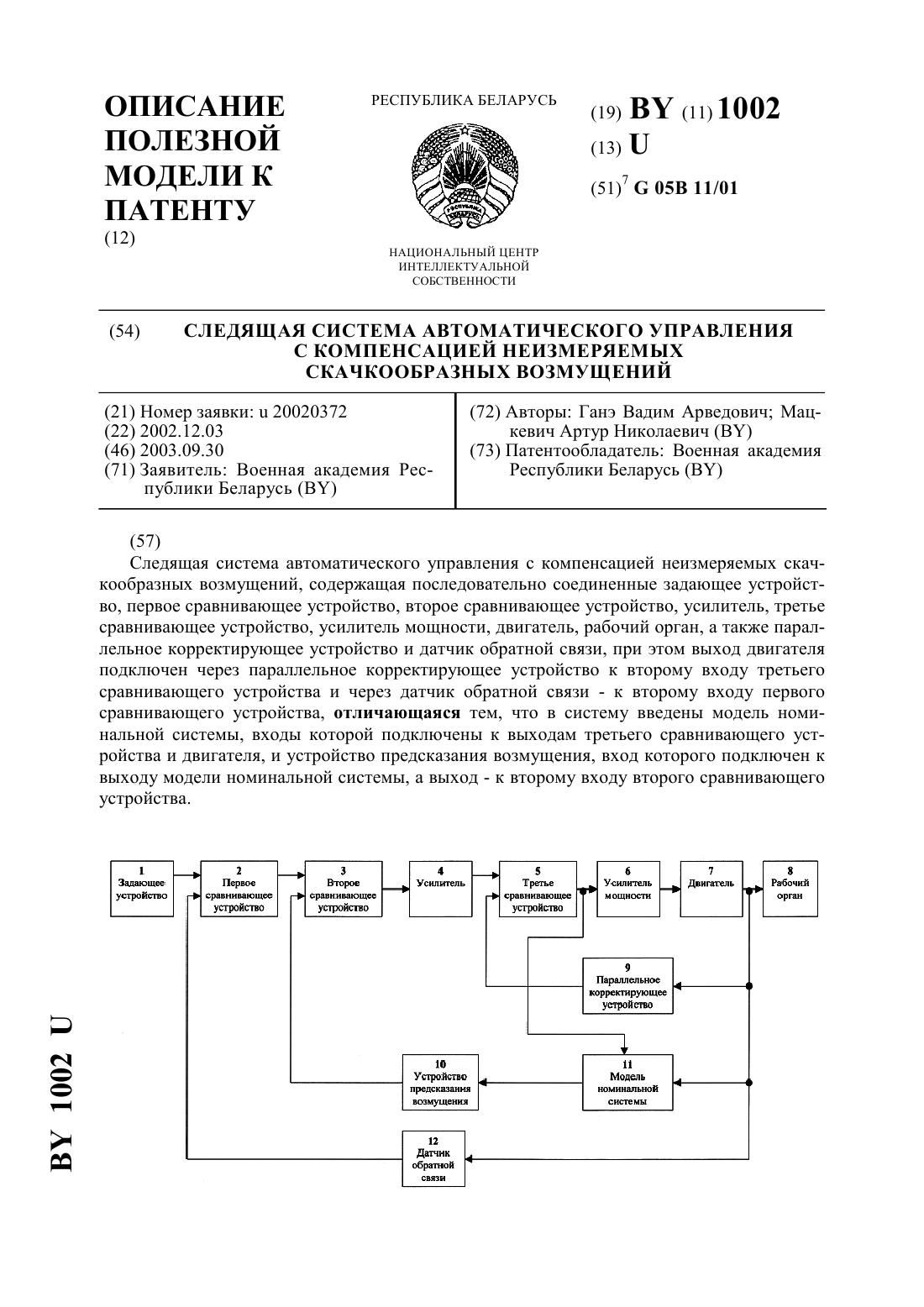
...второму входу первого сравнивающего устройства, и отличается от прототипа тем, что в систему введены модель номинальной системы, входы которой подключены к выходам третьего сравнивающего устройства и двигателя, и устройство предсказания возмущения, вход которого подключен к выходу модели номинальной системы, а выход - к второму входу второго сравнивающего устройства. На фигуре представлена функциональная схема ССАУ с компенсацией неизмеряемых...
Следящая система автоматического управления с компенсацией неизмеряемых возмущений, изменяющихся по экспоненциальному закону
Номер патента: U 1004
Опубликовано: 30.09.2003
Авторы: Сончик Дмитрий Михайлович, Мацкевич Артур Николаевич, Ганэ Вадим Арведович
МПК: G05B 11/01
Метки: закону, компенсацией, экспоненциальному, управления, возмущений, система, автоматического, изменяющихся, следящая, неизмеряемых
Текст:
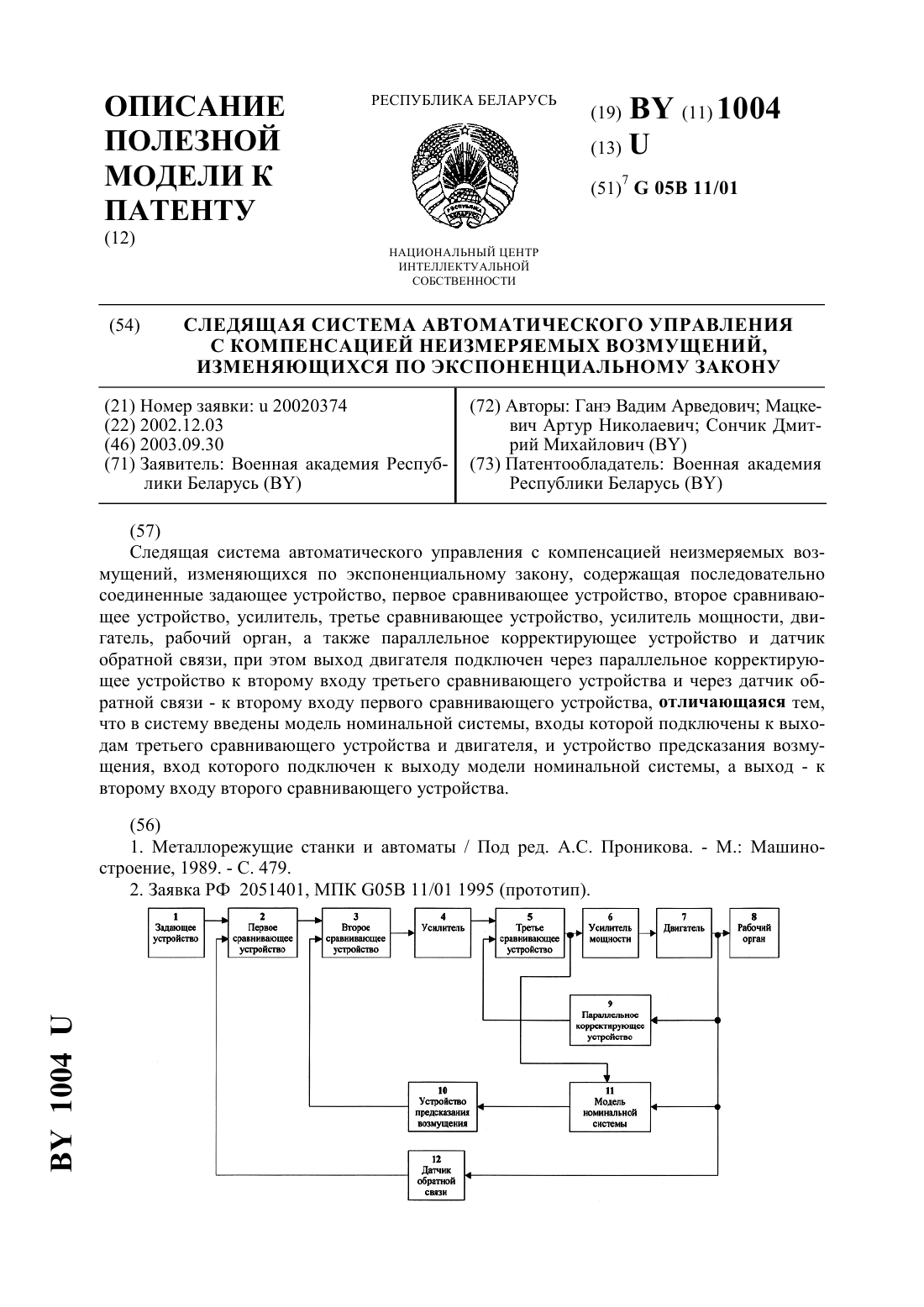
...к выходам третьего сравнивающего устройства и двигателя, и устройство предсказания возмущения, вход которого подключен к выходу модели номинальной системы, а выход - к второму входу второго сравнивающего устройства. На фиг. представлена функциональная схема ССАУ с компенсацией неизмеряемых возмущений, изменяющихся по экспоненциальному закону. ССАУ содержит задающее устройство 1, первое сравнивающее устройство 2, второе сравнивающее устройство...
Следящая система автоматического управления с компенсацией неизмеряемых возмущений, изменяющихся по квадратичному закону

Номер патента: U 1000
Опубликовано: 30.09.2003
Авторы: Санько Андрей Анатольевич, Мацкевич Артур Николаевич
МПК: G05B 11/01
Метки: неизмеряемых, автоматического, следящая, компенсацией, система, закону, управления, изменяющихся, возмущений, квадратичному
Текст:
...сравнивающего устройства и двигателя, и устройство предсказания возмущения, вход которого подключен к выходу модели номинальной системы, а выход - к второму входу второго сравнивающего устройства. На фиг. 1 представлена функциональная схема ССАУ с компенсацией неизмеряемых возмущений, изменяющихся по квадратичному закону, а на фиг. 2 - структурная схема устройства предсказания возмущения. ССАУ содержит задающее устройство 1, первое...
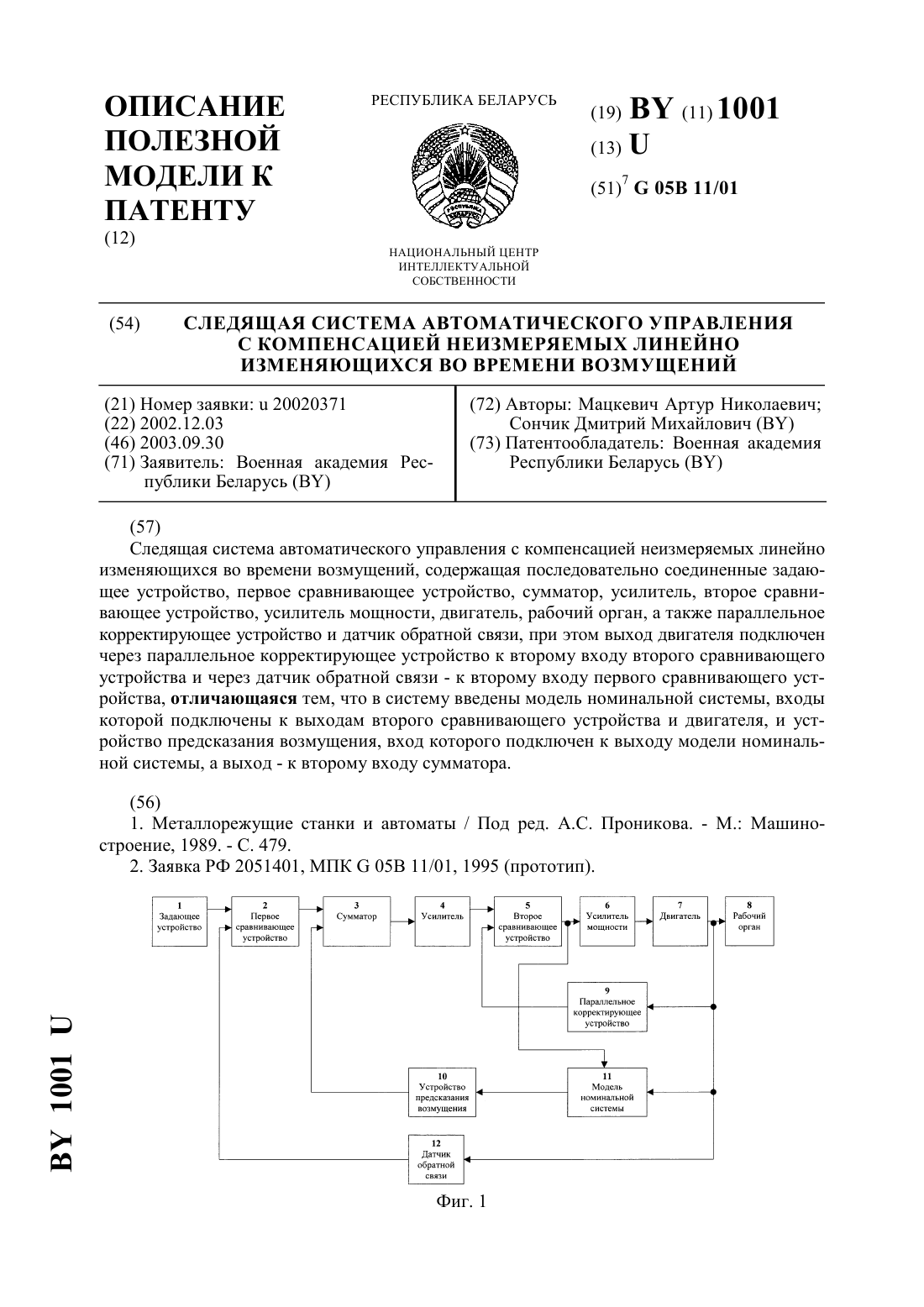
Следящая система автоматического управления с компенсацией неизмеряемых линейно изменяющихся во времени возмущений
Номер патента: U 1001
Опубликовано: 30.09.2003
Авторы: Сончик Дмитрий Михайлович, Мацкевич Артур Николаевич
МПК: G05B 11/01
Метки: возмущений, изменяющихся, неизмеряемых, система, времени, автоматического, управления, компенсацией, следящая, линейно
Текст:
...введены модель номинальной системы, входы которой подключены к выходам второго сравнивающего устройства и двигателя, и устройство предсказания возмущения, вход которого подключен к выходу модели номинальной системы, а выход - к второму входу сумматора. На фиг. 1 представлена функциональная схема ССАУ с компенсацией неизмеряемых линейно изменяющихся во времени возмущений, а на фиг. 2 - структурная схема устройства предсказания возмущения....
Предыдущий патент: Способ двухслоевой разработки мощного калийного пласта
Следующий патент: Способ селективной выемки мощного калийного пласта двухшнековым комбайном
Случайный патент: Способ изготовления древесностружечных плит