Гидрообъемный привод самоходной машины
Номер патента: U 9376
Опубликовано: 30.08.2013
Авторы: Казацкий Василий Александрович, Сей Василий Павлович, Кондратчик Леонид Валерьевич
Текст
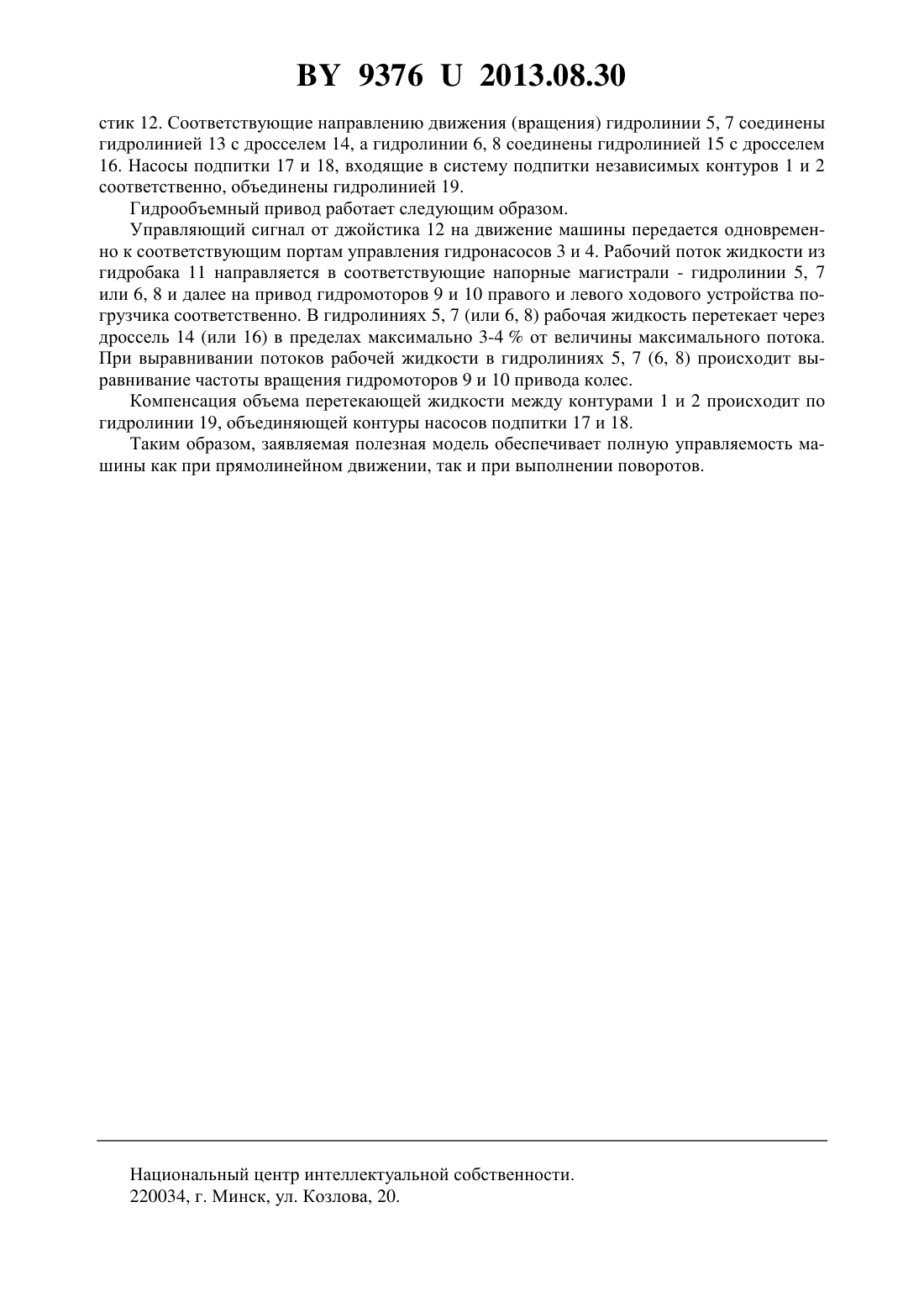
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ГИДРООБЪЕМНЫЙ ПРИВОД САМОХОДНОЙ МАШИНЫ(71) Заявитель Открытое акционерное общество АМКОДОР - управляющая компания холдинга(72) Авторы Сей Василий Павлович Казацкий Василий Александрович Кондратчик Леонид Валерьевич(73) Патентообладатель Открытое акционерное общество АМКОДОР - управляющая компания холдинга(57) Гидрообъемный привод самоходной машины, содержащий два независимых контура гидростатического привода хода, каждый из которых включает в себя гидравлически управляемый насос, соединенный гидролиниями с соответствующим гидромотором по закрытой схеме, систему управления привода и систему подпитки насосов, включающую насосы подпитки на каждый контур, отличающийся тем, что напорные магистрали гидромоторов соединены между собой гидролиниями с установленными в них дросселями с возможностью компенсации объема перетекающей рабочей жидкости между контурами посредством гидролинии, объединяющей насосы подпитки.(56) 1. Полезная модель РБ 7444, 2011. 2. Погрузчик с бортовым поворотом АМКОДОР 211. Руководство по эксплуатации 211.00.00.000 РЭ. - Минск, 2011. 3. Протокол 2137 тензометрических испытаний гидросистемы хода погрузчика А-211. 93762013.08.30 Полезная модель относится к строительно-дорожной технике и может быть использована в бесступенчатых регулируемых трансмиссиях колесных и гусеничных машин, в частности на самоходных машинах, использующих для привода хода гидротрансмиссию,выполненную с раздельными независимыми гидростатическими приводами на колеса,движители и т.п. Известен гидрообъемный привод самоходной машины, имеющий два независимых контура гидростатического привода хода, каждый из которых содержит по крайней мере один управляемый насос, кинематически связанный с двигателем и насосом подпитки и соединенный первой и второй рабочими магистралями с гидромотором, и систему управления насосом 1. Недостатком известной конструкции является отсутствие возможности выравнивания производительности привода в зависимости от условий эксплуатации, состояния и износа элементов привода, различий в характеристиках работы системы управления насосов(различий в характеристиках насосов системы управления). Известен также гидрообъемный привод погрузчика с бортовым поворотом, принятый за прототип, имеющий два независимых контура гидростатического привода хода и включающий в себя два гидравлически управляемых насоса - по одному на каждый борт. Каждый из насосов соединен с соответствующим гидромотором по закрытой схеме. Управление насосом в данной конструкции осуществляется гидравлически с помощью джойстика 2. К недостаткам приведенной конструкции, как и упомянутого первого аналога, можно отнести то, что при поступлении сигнала от джойстика реакция системы управления насосами различна. Исследования показывают 3, что величина расхождения настройки системы управления новых насосов в среднем составляет от 1 до 3 . Таким образом, при сложении различных факторов, таких как состояние грунта, износ, сборка элементов привода, КПД контура будет происходить увод машины от прямолинейного движения и неточность управления при поворотах. В известных гидрообъемных приводах регулировка системы управления возможна лишь механическими способами, а именно органами управления, регулировкой механической части привода либо заменой и регулировкой гидравлических аппаратов, что достаточно трудоемко и требует достаточной квалификации операторов машин. Задачей полезной модели является обеспечение прямолинейности хода самоходной машины и улучшение управляемости при поворотах, что повысит потребительские качества машины точности и безопасности выполнения работ. Данная задача решается следующим образом. Гидрообъемный привод самоходной машины, содержащий два независимых контура гидростатического привода хода, включающие гидравлически управляемые насосы - по одному на каждый контур, соединенные с соответствующим гидромотором по закрытой схеме, систему управления привода и систему подпитки с насосами подпитки на каждый контур. Управление насосами осуществляется одним джойстиком, поэтому управляющий сигнал, поступающий на каждый насос, одинаковой величины. Выравнивание потоков при поступлении сигнала управления на гидронасосы согласно заявляемой полезной модели осуществляется за счет соединения соответствующих напорных магистралей гидромоторов посредством гидролиний с установленными в них дросселями, при этом компенсация объема перетекающей рабочей жидкости между контурами осуществляется объединением контуров насосов подпитки также посредством гидролинии. На фигуре представлена схема гидрообъемного привода самоходной машины. Гидрообъемный привод содержит два независимых контура 1 и 2, каждый из которых содержит гидронасосы 3 и 4, соединенные гидравлическими линиями 5, 6, 7, 8 с моторами 9 и 10 соответственно по закрытой схеме, гидробак 11, блок системы управления - джой 2 93762013.08.30 стик 12. Соответствующие направлению движения (вращения) гидролинии 5, 7 соединены гидролинией 13 с дросселем 14, а гидролинии 6, 8 соединены гидролинией 15 с дросселем 16. Насосы подпитки 17 и 18, входящие в систему подпитки независимых контуров 1 и 2 соответственно, объединены гидролинией 19. Гидрообъемный привод работает следующим образом. Управляющий сигнал от джойстика 12 на движение машины передается одновременно к соответствующим портам управления гидронасосов 3 и 4. Рабочий поток жидкости из гидробака 11 направляется в соответствующие напорные магистрали - гидролинии 5, 7 или 6, 8 и далее на привод гидромоторов 9 и 10 правого и левого ходового устройства погрузчика соответственно. В гидролиниях 5, 7 (или 6, 8) рабочая жидкость перетекает через дроссель 14 (или 16) в пределах максимально 3-4 от величины максимального потока. При выравнивании потоков рабочей жидкости в гидролиниях 5, 7 (6, 8) происходит выравнивание частоты вращения гидромоторов 9 и 10 привода колес. Компенсация объема перетекающей жидкости между контурами 1 и 2 происходит по гидролинии 19, объединяющей контуры насосов подпитки 17 и 18. Таким образом, заявляемая полезная модель обеспечивает полную управляемость машины как при прямолинейном движении, так и при выполнении поворотов. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 3
МПК / Метки
МПК: F16H 39/02, F16H 61/42, B60K 17/10
Метки: машины, гидрообъемный, самоходной, привод
Код ссылки
<a href="https://by.patents.su/3-u9376-gidroobemnyjj-privod-samohodnojj-mashiny.html" rel="bookmark" title="База патентов Беларуси">Гидрообъемный привод самоходной машины</a>
Гидрообъемный привод самоходной машины
Номер патента: U 7444
Опубликовано: 30.08.2011
Авторы: Казацкий Василий Александрович, Немаровский Юрий Васильевич, Сей Василий Павлович
МПК: F16H 39/02, F16H 61/42, B60K 17/10...
Метки: машины, привод, гидрообъемный, самоходной
Текст:
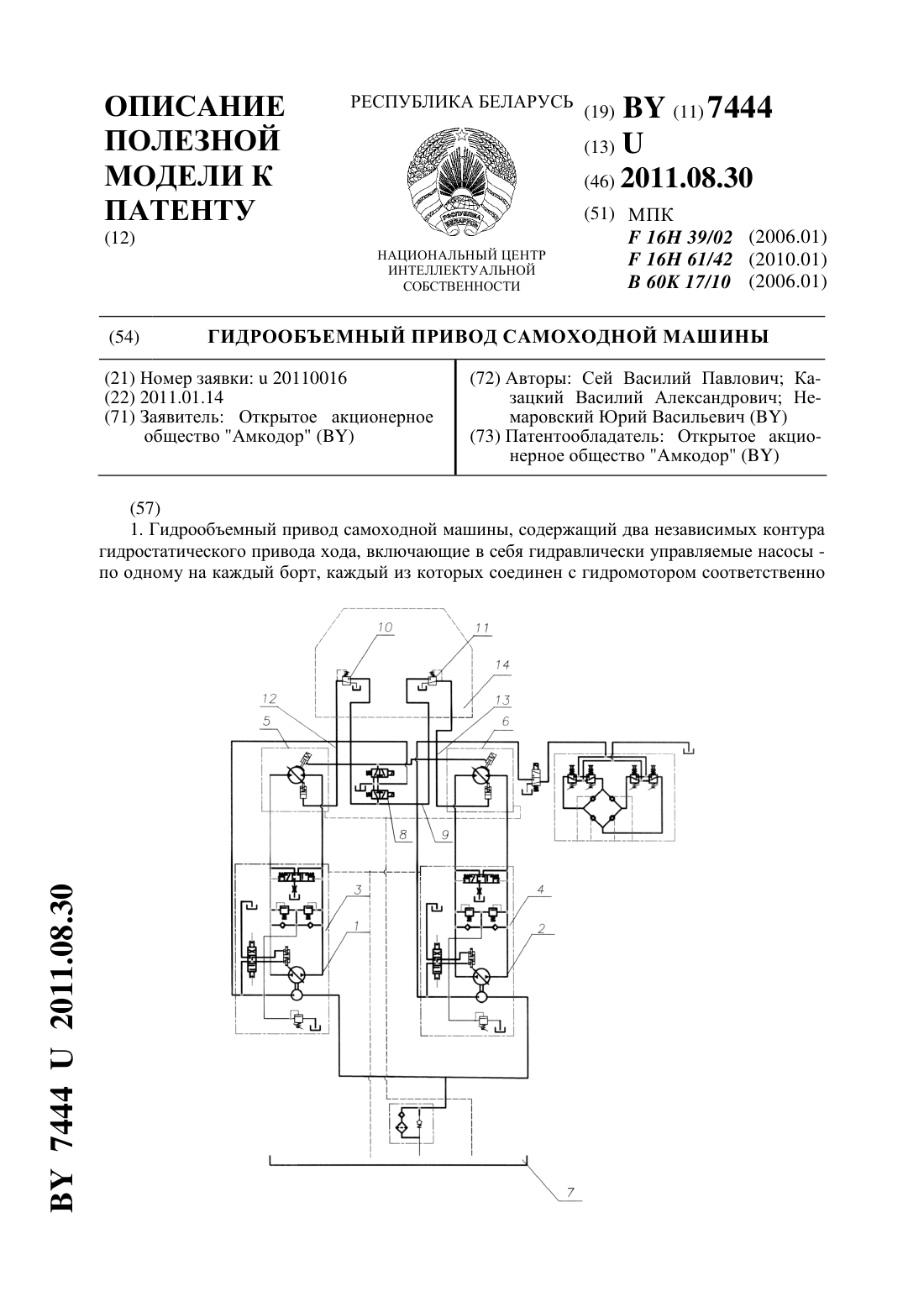
...хода управляющий сигнал на них передается одинаково без возможности регулирования. Необходимость регулирования сигналов, передающихся на гидромоторы хода независимых контуров гидрообъмного привода, вызвана тем, что вращение исполнительных механизмов (в частном случае гусениц машины штабелирующей) не может быть одинаковым. Это связано с условиями эксплуатации, состоянием грунта, износом элементов привода, КПД агрегатов и т.п., что...
Гидрообъемный ходоуменьшитель самоходной машины
Номер патента: 753
Опубликовано: 15.08.1995
Авторы: Ворончихин Ф. Г., Стецко П. А., Городецкий К. И., Мастеровой В. М., Довнар О. К., Дакимович В. В., Ксеневич И. П.
МПК: B60K 17/10
Метки: гидрообъемный, ходоуменьшитель, машины, самоходной
Текст:
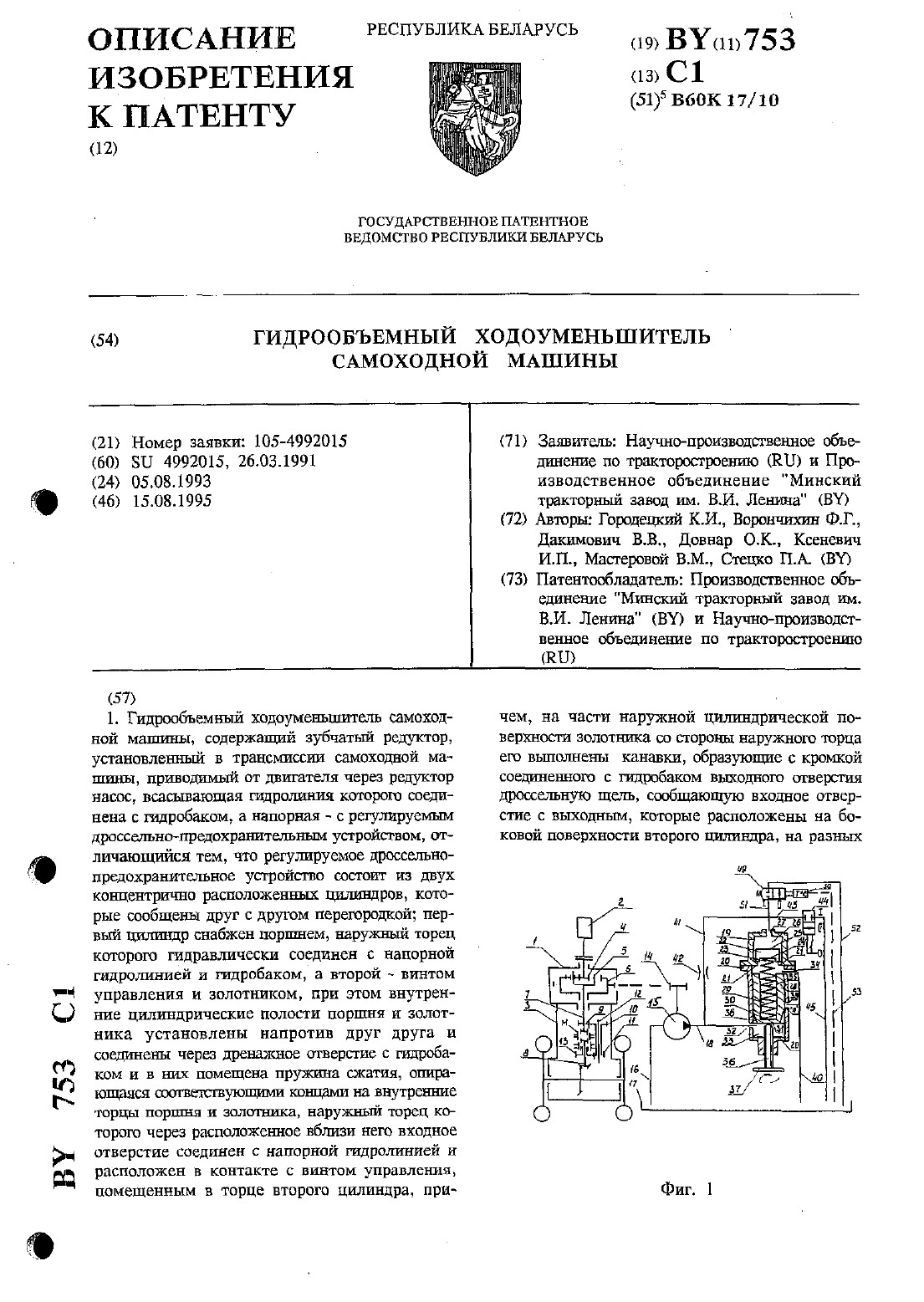
...рез редгуктор насос-всаоывающая гидролинин которого соединена с гид баном.а напорная-о регулирЙдьщ тесаные-предохранительным устрой вомдтроссеадьно-предокранитедгьное устройство состоит из двух нонценч чно раесиолонехшш шшлиндриндсоторне сообщены прут о другом и отдели неоплатной иерегородкойшервжш цилиндр снабжен пошъеьънарушш тц которого гидравлическая соедшнен с напорной гиюоахинией и гидхробат второй - винтом управления и...
Гидрообъемный привод рабочего оборудования
Номер патента: U 6765
Опубликовано: 30.10.2010
Авторы: Котлобай Анатолий Яковлевич, Гарост Андрей Митрофанович, Котлобай Андрей Анатольевич
МПК: F15B 11/22, F16H 61/40
Метки: привод, рабочего, гидрообъемный, оборудования
Текст:
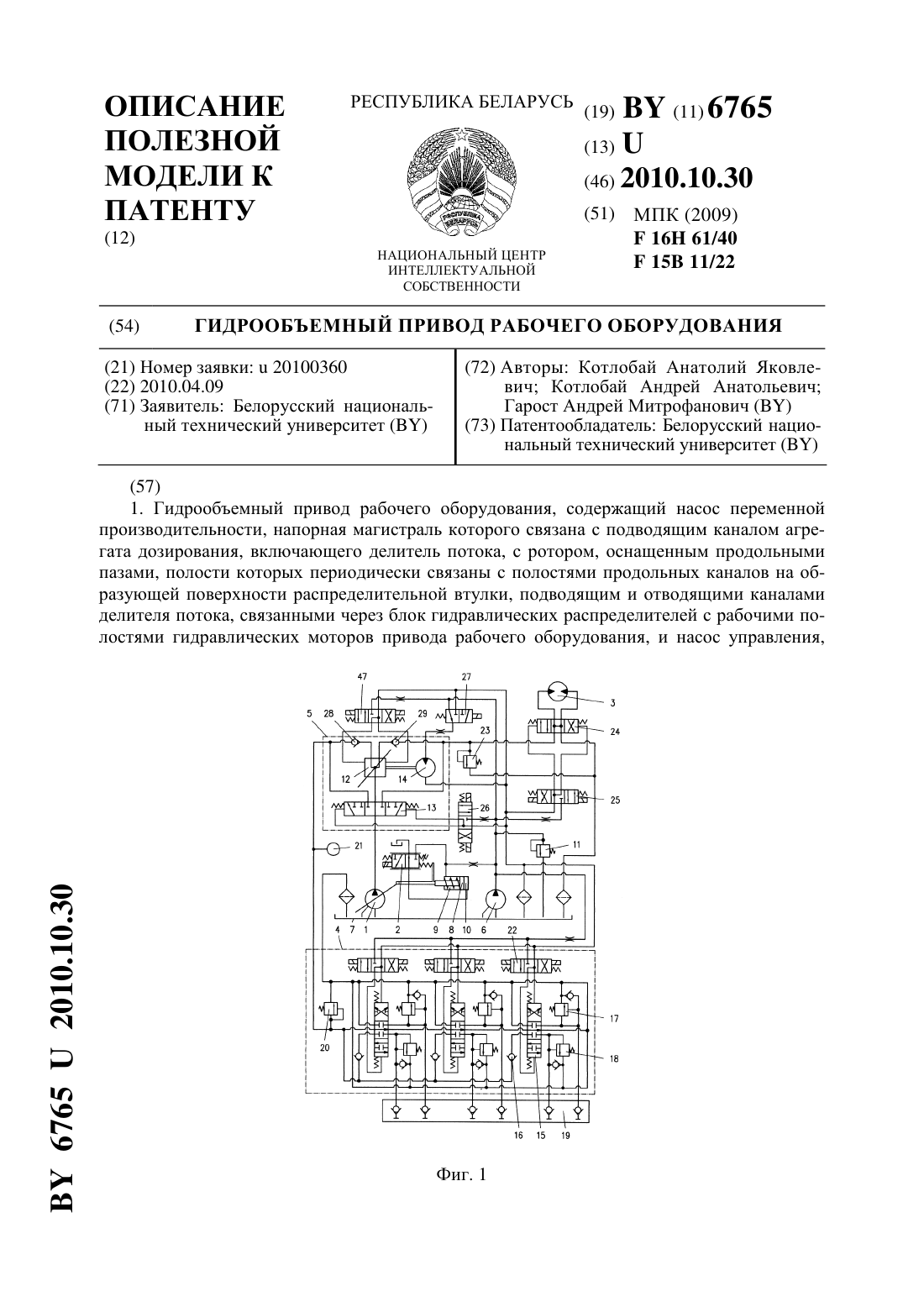
...гидрораспределителя подпружинен пружинами 44. Кулачки 42, 43 образуют торцевые управляющие полости 45, 46,связанные через трехпозиционный гидрораспределитель 47 с электромагнитным управлением, с напорной магистралью насоса 6 и сливом в бак 7. Угловой шаг каналов 35, 36, 37 совпадает с шагом пазов 33, 34. Для измененения характеристик расхода рабочей жидкости по напорным магистралям делителя потока центральный угол продольных пазов 33,...
Гидропривод самоходной машины
Номер патента: U 1659
Опубликовано: 30.12.2004
Авторы: Шевченко Василий Савельевич, Мелешко Михаил Григорьевич, Резвинский Виктор Михайлович, Королькевич Александр Викторович
МПК: B60K 17/10
Метки: машины, гидропривод, самоходной
Текст:
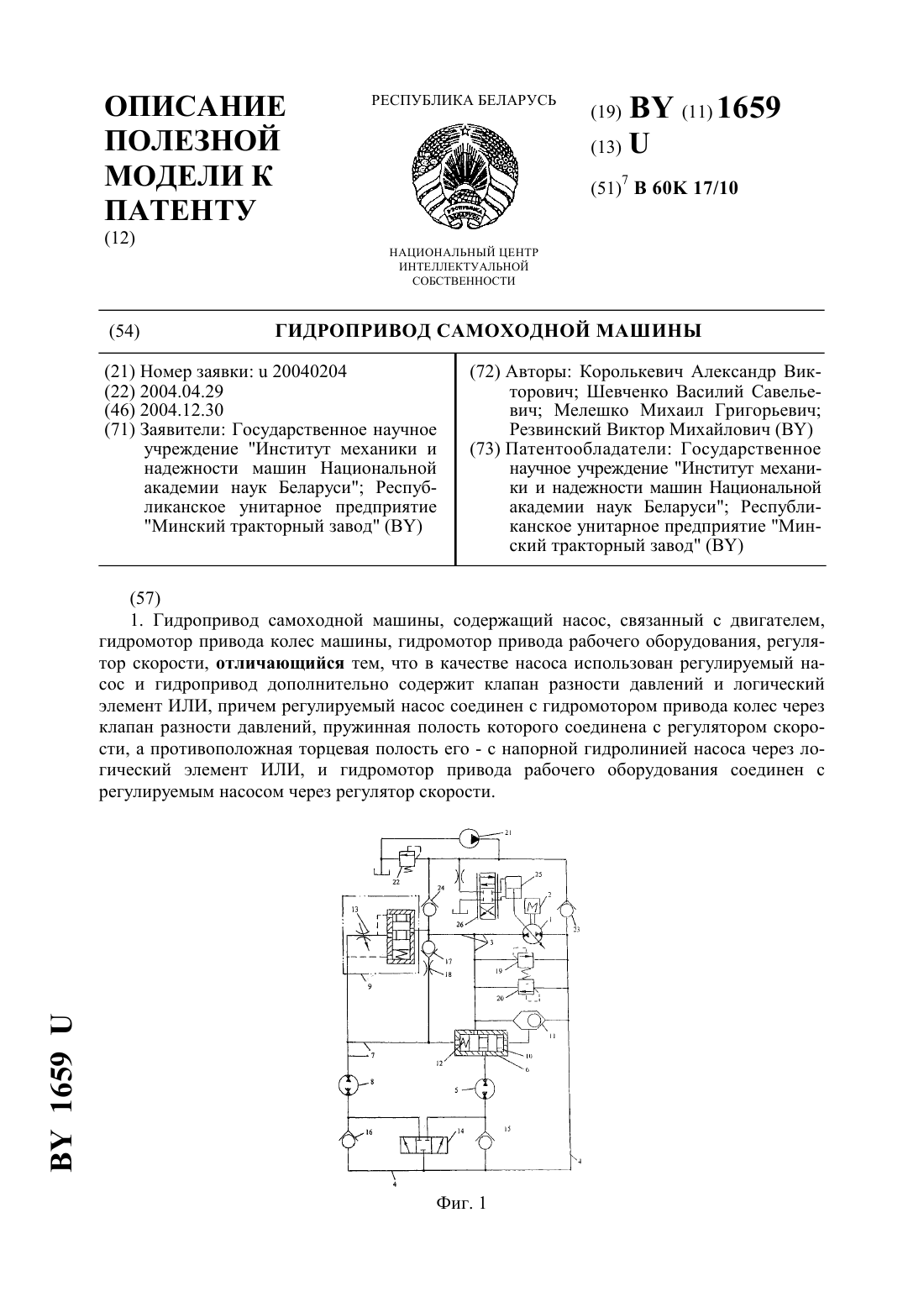
...Движение машины при неработающем рабочем оборудовании. Работа рабочего оборудования без движения машин. Работа рабочего оборудования при движении машины. Указанные варианты совместной работы машины и оборудования рассмотрим на режимах тяги, торможения гидроприводом и реверса. Движение машины при неработающем рабочем оборудовании. Для отключения рабочего оборудования достаточно полностью закрыть дроссель 13. При увеличении подачи насосом...
Гидропривод самоходной машины
Номер патента: 10962
Опубликовано: 30.08.2008
Авторы: Шевченко Василий Савельевич, Королькевич Александр Викторович, Бартош Петр Романович, Королькевич Виктор Александрович, Маковский Максим Антонович
МПК: F15B 21/00, B60K 17/10, F16H 39/00...
Метки: самоходной, гидропривод, машины
Текст:
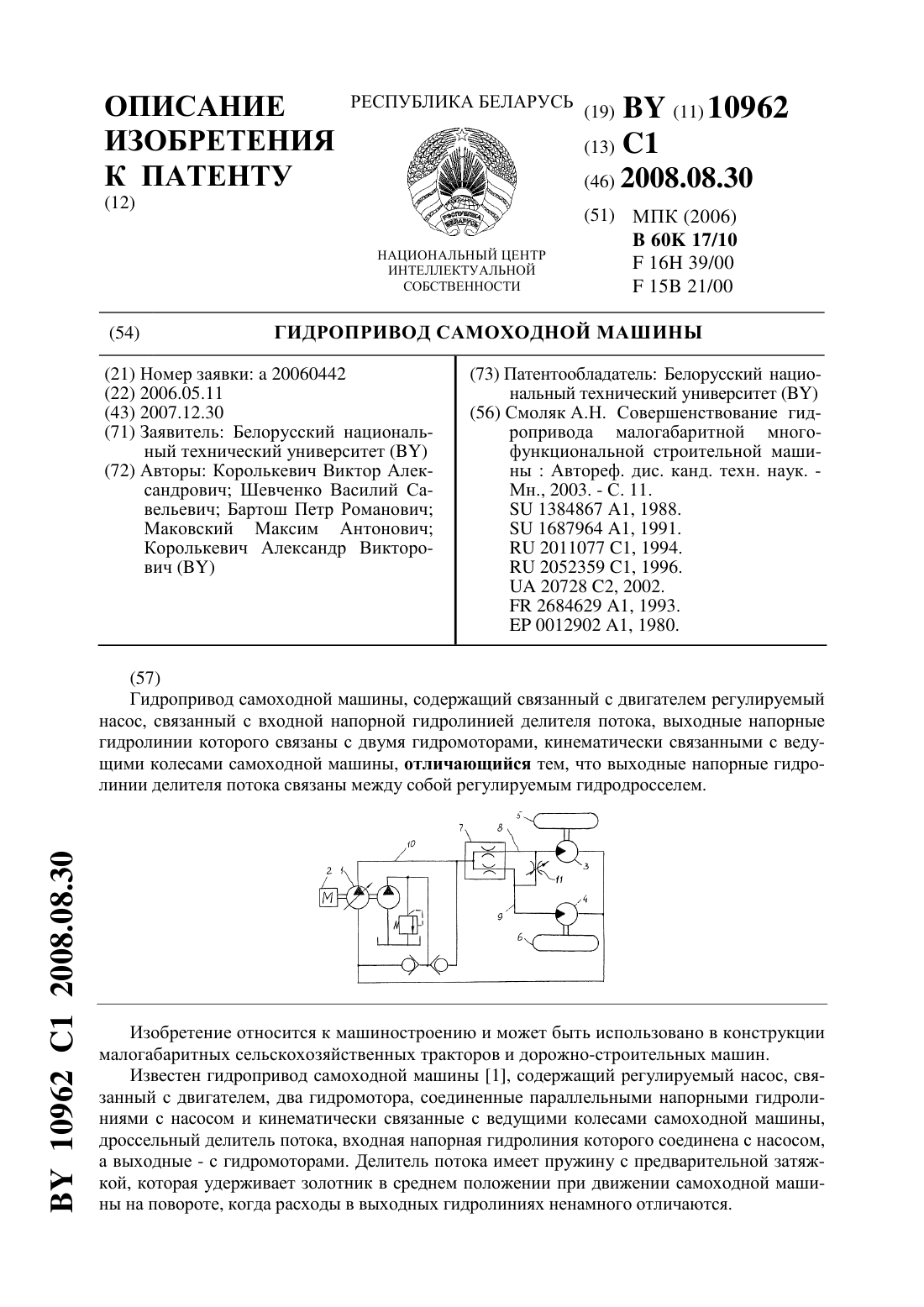
...а выходные - с гидромоторами. К недостаткам прототипа следует отнести отсутствие в схеме возможности получить бесступенчатое регулирование момента блокирования ведущих колес самоходной машины. Задача изобретения - обеспечение возможности бесступенчатого изменения момента блокирования ведущих колес самоходной машины. Поставленная задача достигается тем, что в гидроприводе самоходной машины, содержащем связанный с двигателем регулируемый насос,...
Предыдущий патент: Сканирующий емкостной преобразователь
Следующий патент: Электромашинный преобразователь постоянного тока в переменный трехфазный ток
Случайный патент: Функциональное покрытие для полупроводниковых кремниевых пластин ориентации (111)