Дальномер на цифровой фотокамере
Номер патента: U 7538
Опубликовано: 30.08.2011
Авторы: Козлов Владимир Леонидович, Кузьмичев Илья Романович
Текст
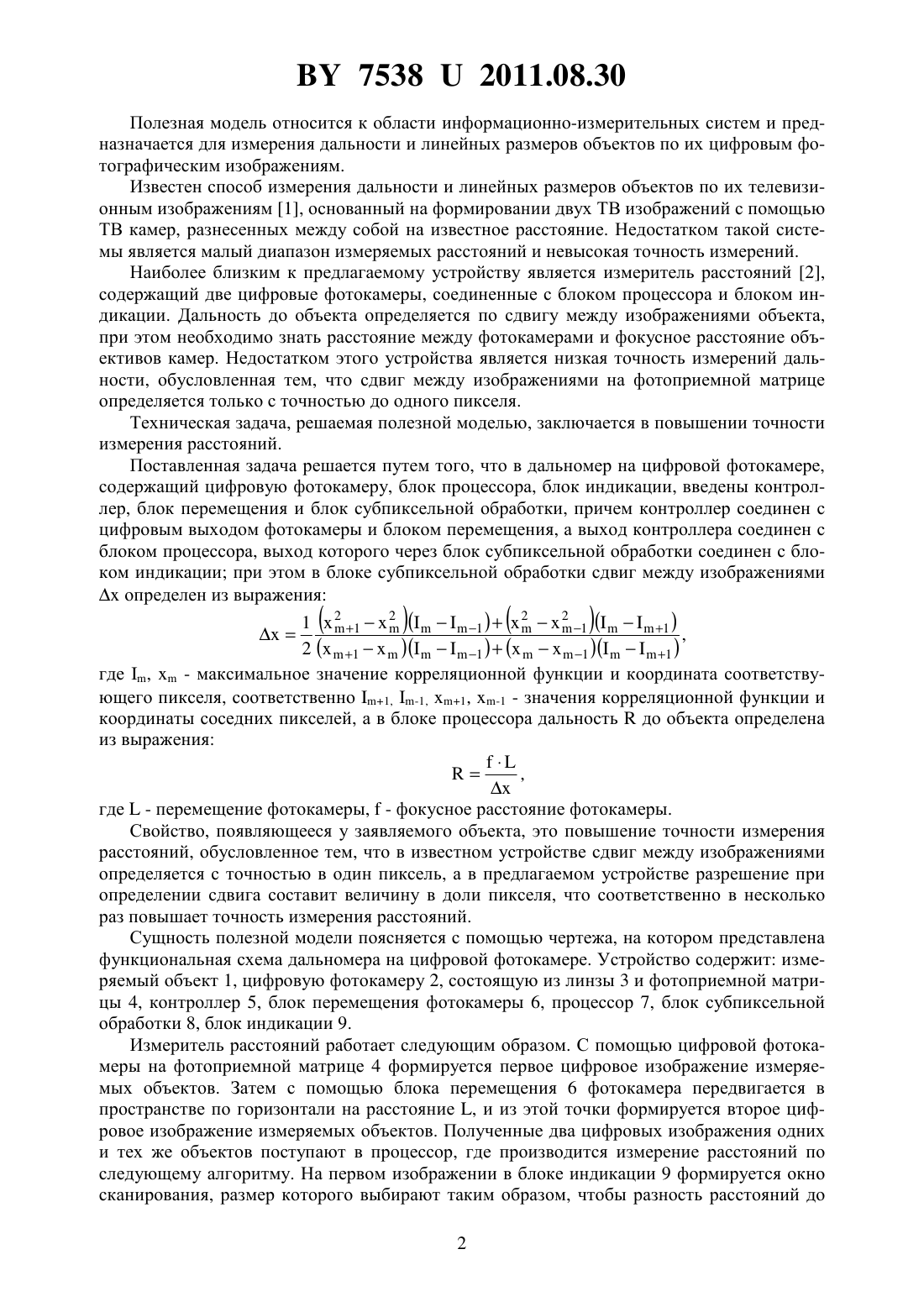
НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ДАЛЬНОМЕР НА ЦИФРОВОЙ ФОТОКАМЕРЕ(71) Заявитель Белорусский государственный университет(72) Авторы Козлов Владимир Леонидович Кузьмичев Илья Романович(73) Патентообладатель Белорусский государственный университет(57) Дальномер на цифровой фотокамере, содержащий цифровую фотокамеру, блок процессора, блок индикации, отличающийся тем, что в него введены контроллер, блок перемещения и блок субпиксельной обработки, причем контроллер соединен с цифровым выходом фотокамеры и блоком перемещения, а выход контроллера соединен с блоком процессора, выход которого через блок субпиксельной обработки соединен с блоком индикации при этом в блоке субпиксельной обработки сдвиг между изображениямиопределен из выражения 12 12 (1 )22 1 (1 ),2 (1)(1 )(1 )(1 ) где ,- максимальное значение корреляционной функции и координата соответствующего пикселя, соответственно 1, -1, 1, -1 - значения корреляционной функции и координаты соседних пикселей а в блоке процессора дальностьдо объекта определена из выражения(56) 1. Патент РФ 2381521, МПК 01 11/00. Способ измерения дальности и линейных размеров объектов по их телевизионным изображениям. 2009. 2.5432594, МПК 01 3/00, 1995. 75382011.08.30 Полезная модель относится к области информационно-измерительных систем и предназначается для измерения дальности и линейных размеров объектов по их цифровым фотографическим изображениям. Известен способ измерения дальности и линейных размеров объектов по их телевизионным изображениям 1, основанный на формировании двух ТВ изображений с помощью ТВ камер, разнесенных между собой на известное расстояние. Недостатком такой системы является малый диапазон измеряемых расстояний и невысокая точность измерений. Наиболее близким к предлагаемому устройству является измеритель расстояний 2,содержащий две цифровые фотокамеры, соединенные с блоком процессора и блоком индикации. Дальность до объекта определяется по сдвигу между изображениями объекта,при этом необходимо знать расстояние между фотокамерами и фокусное расстояние объективов камер. Недостатком этого устройства является низкая точность измерений дальности, обусловленная тем, что сдвиг между изображениями на фотоприемной матрице определяется только с точностью до одного пикселя. Техническая задача, решаемая полезной моделью, заключается в повышении точности измерения расстояний. Поставленная задача решается путем того, что в дальномер на цифровой фотокамере,содержащий цифровую фотокамеру, блок процессора, блок индикации, введены контроллер, блок перемещения и блок субпиксельной обработки, причем контроллер соединен с цифровым выходом фотокамеры и блоком перемещения, а выход контроллера соединен с блоком процессора, выход которого через блок субпиксельной обработки соединен с блоком индикации при этом в блоке субпиксельной обработки сдвиг между изображениямиопределен из выражения 12 12 (1 )22 1 (1 ),2 (1)(1 )(1 )(1 ) где ,- максимальное значение корреляционной функции и координата соответствующего пикселя, соответственно 1, -1, 1, -1 - значения корреляционной функции и координаты соседних пикселей, а в блоке процессора дальностьдо объекта определена из выражения, где- перемещение фотокамеры,- фокусное расстояние фотокамеры. Свойство, появляющееся у заявляемого объекта, это повышение точности измерения расстояний, обусловленное тем, что в известном устройстве сдвиг между изображениями определяется с точностью в один пиксель, а в предлагаемом устройстве разрешение при определении сдвига составит величину в доли пикселя, что соответственно в несколько раз повышает точность измерения расстояний. Сущность полезной модели поясняется с помощью чертежа, на котором представлена функциональная схема дальномера на цифровой фотокамере. Устройство содержит измеряемый объект 1, цифровую фотокамеру 2, состоящую из линзы 3 и фотоприемной матрицы 4, контроллер 5, блок перемещения фотокамеры 6, процессор 7, блок субпиксельной обработки 8, блок индикации 9. Измеритель расстояний работает следующим образом. С помощью цифровой фотокамеры на фотоприемной матрице 4 формируется первое цифровое изображение измеряемых объектов. Затем с помощью блока перемещения 6 фотокамера передвигается в пространстве по горизонтали на расстояние , и из этой точки формируется второе цифровое изображение измеряемых объектов. Полученные два цифровых изображения одних и тех же объектов поступают в процессор, где производится измерение расстояний по следующему алгоритму. На первом изображении в блоке индикации 9 формируется окно сканирования, размер которого выбирают таким образом, чтобы разность расстояний до 75382011.08.30 отдельных фрагментов выделенного объекта была меньше инструментального разрешения по дальности. Автоматически окно сканирования с такими же координатами формируется и на втором снимке. Затем осуществляется сканирование одного окна относительно другого по горизонтали и вертикали. Каждую итерацию окно сдвигается на пиксель вдоль осей в системе координат изображения и вычисляется соответствующее значение корреляционной функции. Выбирая вид используемой корреляционной функции, необходимо чтобы она была нормированная и двухмерная, чтобы устранить влияние на точность измерения различия яркости и контрастность в первом и втором окнах сканирования, и возможное отклонение взаимного расположения фотокамер от горизонтальной линии. По положению максимального значения нормированной корреляционной функции определяют сдвиг между изображениями 2-1. Дальностьдо выделенной области объекта определяется из выражения где- расстояние между фотокамерами,- фокусное расстояние фотокамер. Аналогичным образом определяются расстояниядо всех объектов, попавших в поле зрения фотокамеры. Так как сканирование одного окна относительно другого осуществляется со сдвигом на один пиксель вдоль осей координат, то положение максимума корреляционной функции и, следовательно, сдвиг между изображениями определяется также с точностью в один пиксель. Этот фактор значительно ограничивает точность измерения расстояний. Для повышения точности измерения расстояний необходимо определять положение максимума корреляционной функции (сдвига между изображениями ) в пределах одного пикселя. Для уточнения величины сдвигав субпиксельном диапазоне используется параболическая интерполяция между пикселем с наибольшим значением корреляционной функции и его соседними пикселями, локализирующая максимум параболы в заданном интервале. Допустим найден пиксель с максимальным значением корреляционной функциии координатой . А его соседние узлы с координатами 1 и -1 имеют значения интенсивности 1 и -1, причем 1 и -1 . Для уточнения величины сдвигана заданном интервале проводится локализация максимума путем параболической интерполяции в соответствии с выражением 12 12 (1 )22 1 (1 ). 2 (1)(1 )(1 )(1 ) Современные матрицы имеют количество чувствительных элементов (пикселей) более десяти миллионов. Следовательно, с использованием субпиксельной интерполяции относительная погрешность измерения величины сдвига , а значит и дальности будет не хуже 10-4-10-5. Знать точное значение расстояния между чувствительными элементами фотоприемной матрицы и значение фокуса объектива нет необходимости, так как эти значения можно определить при калибровке системы на точно известном расстоянии. Таким образом, что за счет введения блока субпиксельной обработки и использования методики субпиксельной интерполяции достигается повышение точности измерения расстояний в результате анализа двух цифровых фотографических изображений, полученных с двух точек, разнесенных в пространстве по горизонтали. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 3
МПК / Метки
МПК: G01C 3/00
Метки: дальномер, фотокамере, цифровой
Код ссылки
<a href="https://by.patents.su/3-u7538-dalnomer-na-cifrovojj-fotokamere.html" rel="bookmark" title="База патентов Беларуси">Дальномер на цифровой фотокамере</a>
Измеритель расстояний на цифровой фотокамере
Номер патента: U 7502
Опубликовано: 30.08.2011
Авторы: Козлов Владимир Леонидович, Кузьмичев Илья Романович
МПК: G01C 3/00
Метки: фотокамере, цифровой, расстояний, измеритель
Текст:
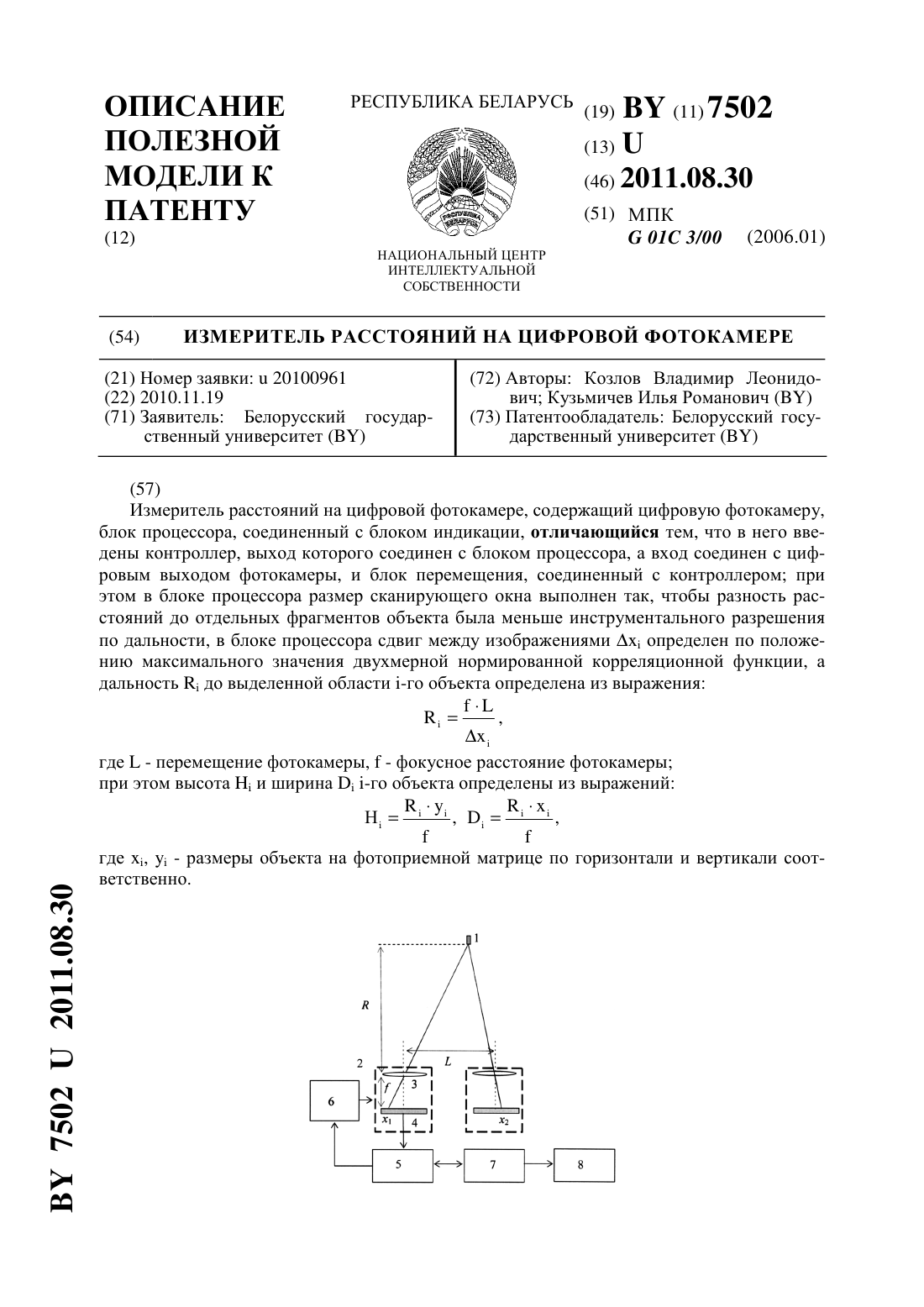
...различия яркости и контрастность обоих изображений. Так как два изображения формируются с помощью одной фотокамеры, отсутствует влияние на точность измерений различия чувствительности фотоприемных матриц и разницы фокусных расстояний камер. 2 75022011.08.30 Сущность полезной модели поясняется с помощью фигуры, на которой представлена функциональная схема измерителя расстояний на цифровой фотокамере. Устройство содержит измеряемый объект...
Лазерный дальномер
Номер патента: U 633
Опубликовано: 30.09.2002
Авторы: Бриндиков Виктор Николаевич, Савченко Владимир Дмитриевич
МПК: G01C 3/08
Текст:
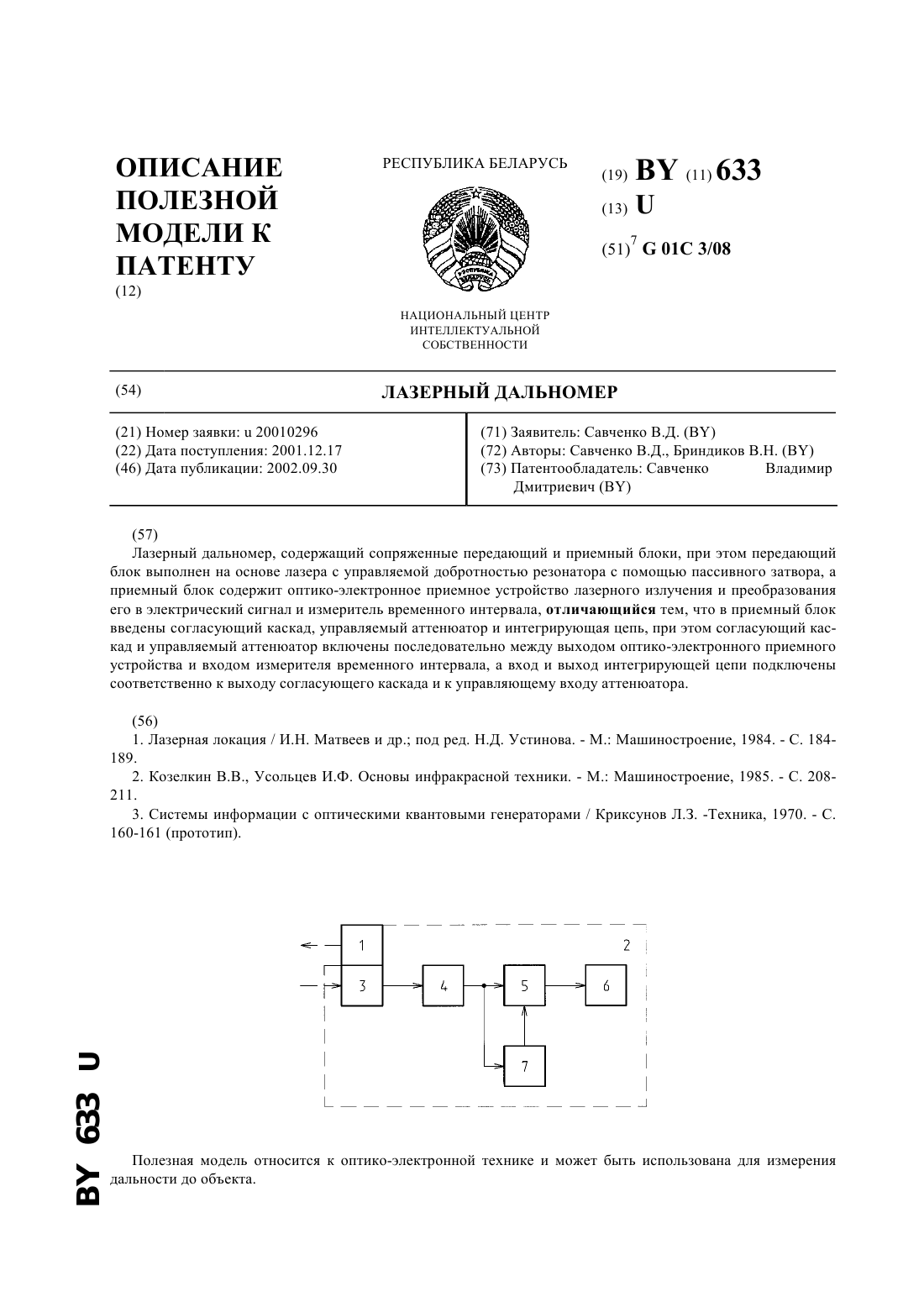
...в приемный блок введены согласующий каскад, управляемый аттенюатор и интегрирующая цепь, при этом согласующий каскад и управляемый аттенюатор включены последовательно между выходом оптико-электронного приемного устройства и входом измерителя временного интервала, а вход и выход интегрирующей цепи подключены соответственно к выходу согласующего каскада и к управляющему входу аттенюатора. Введение новых элементов и в указанной связи с...
Рециркуляционный дальномер
Номер патента: 14159
Опубликовано: 30.04.2011
Автор: Козлов Владимир Леонидович
МПК: G01C 3/08
Метки: рециркуляционный, дальномер
Текст:
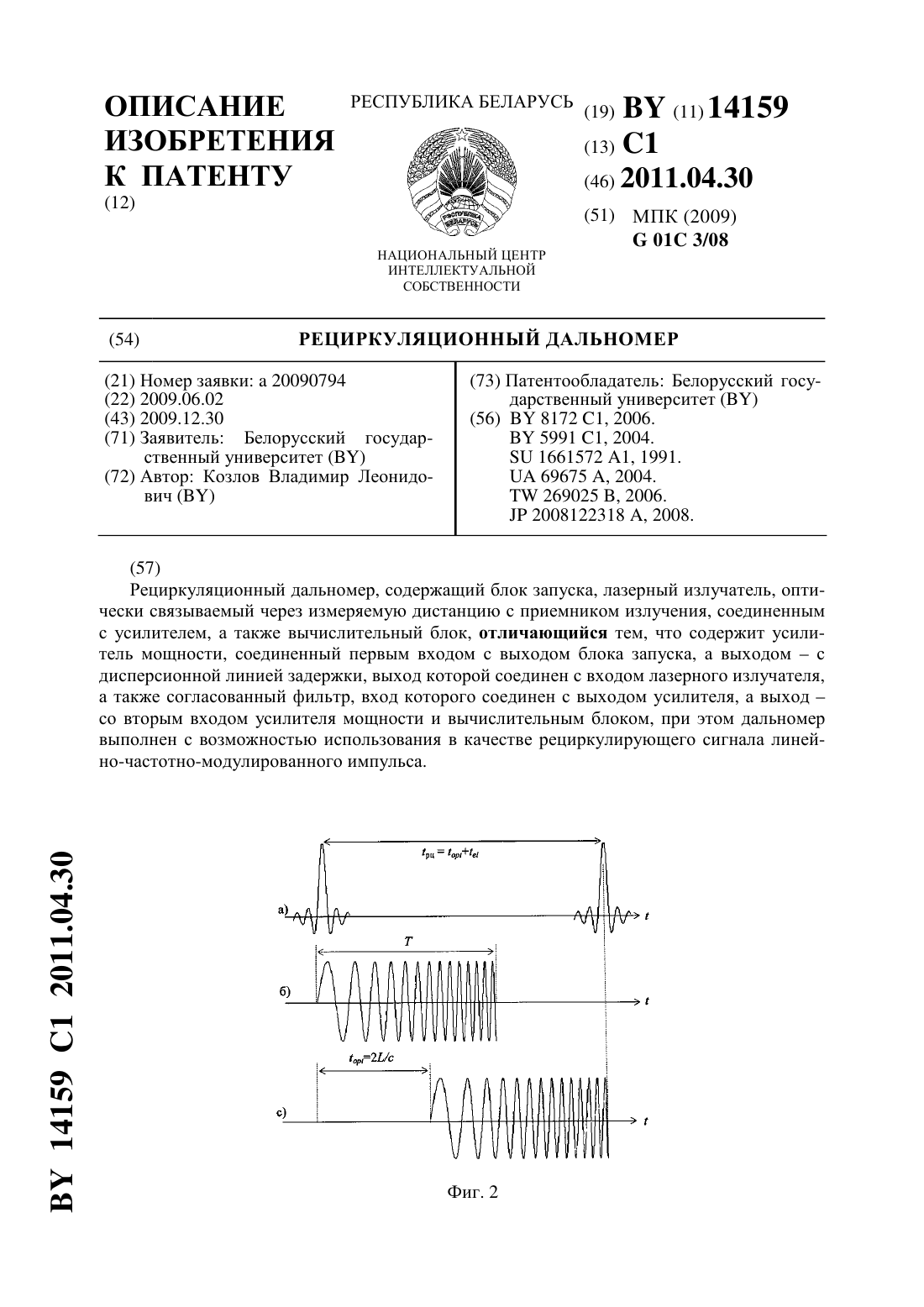
...работает следующим образом. Для запуска режима рециркуляции блок запуска 1 формирует короткий импульс, аналогичный сжатому импульсу на выходе согласованного фильтра (форма импульса представлена на фиг. 2), который через усилитель мощности 2 возбуждает дисперсионную линию задержки 3. Формирование и оптимальная обработка ЛЧМ импульса осуществляется согласованными фильтрами, выполненными на основе дисперсионных ультразвуковых линий задержки....
Измеритель расстояний
Номер патента: U 6127
Опубликовано: 30.04.2010
Автор: Козлов Владимир Леонидович
МПК: G01C 3/00
Метки: измеритель, расстояний
Текст:
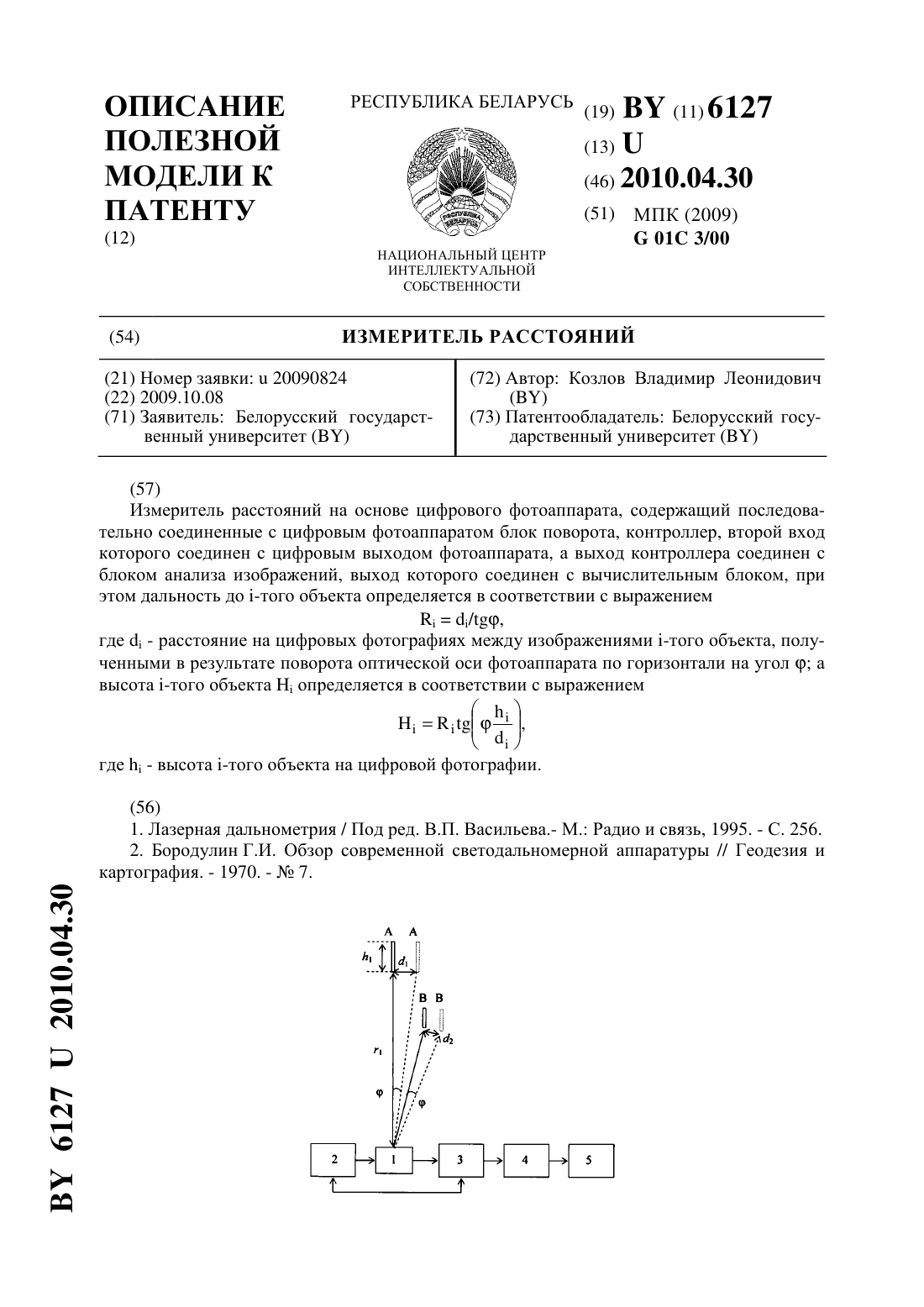
...на цифровых фотографиях между изображениями -того объекта, полученными в результате поворота оптической оси фотоаппарата по горизонтали на угола высота -того объектаопределяется в соответствии с выражением,где- высота -того объекта на цифровой фотографии. Свойства, появляющиеся у заявляемого объекта, - это повышение точности измерения расстояний, обусловленное корреляционной обработкой цифровых изображений в блоке анализа изображений...
Лазерный дальномер
Номер патента: U 2897
Опубликовано: 30.08.2006
Авторы: Тареев Анатолий Михайлович, Янаев Владимир Николаевич, Шандора Вадим Викентьевич, Батюшков Валентин Вениаминович
МПК: G01C 3/08
Текст:
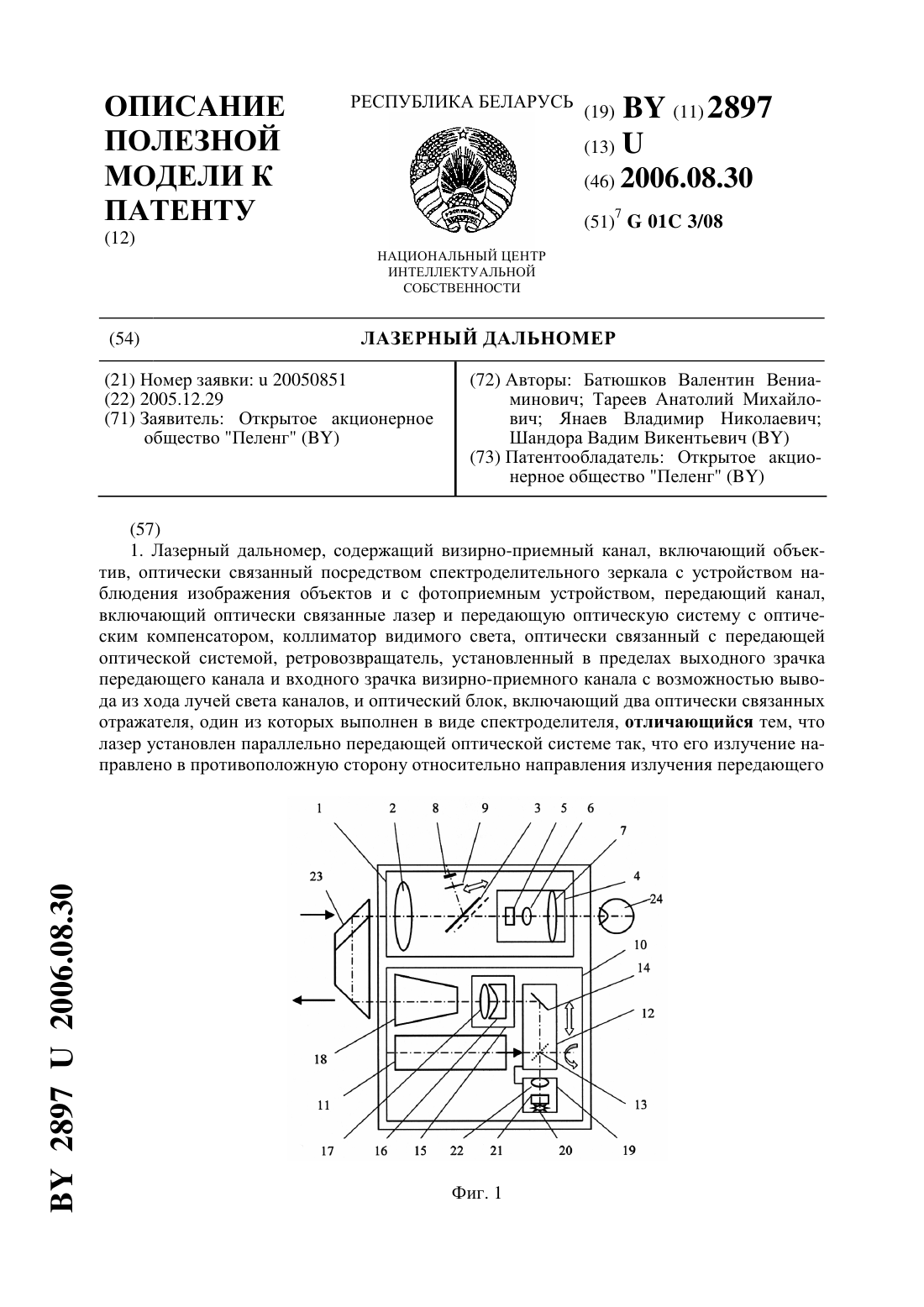
...измерения дальности, обеспечивает защиту фотоприемного устройства от воздействия лазерного излучения при изготовлении или ремонте лазерного дальномера или лазерного излучения средств противодействия противника. На фиг. 1 изображена принципиальная схема лазерного дальномера, на фиг. 2 изображен вариант принципиальной схемы лазерного дальномера, на фиг. 3 показан вид поля зрения лазерного дальномера в момент выверки. Лазерный дальномер содержит...
Предыдущий патент: Рабочий орган почвообрабатывающего орудия
Следующий патент: Отопительно-вентиляционная система производственного помещения
Случайный патент: Способ шлифования с одновременным упрочнением обрабатываемой поверхности