Гидропривод самоходной машины
Номер патента: 11015
Опубликовано: 30.08.2008
Авторы: Маковский Максим Антонович, Королькевич Виктор Александрович, Бартош Петр Романович, Королькевич Александр Викторович, Шевченко Василий Савельевич

Текст
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Белорусский национальный технический университет(72) Авторы Королькевич Виктор Александрович Шевченко Василий Савельевич Бартош Петр Романович Маковский Максим Антонович Королькевич Александр Викторович(73) Патентообладатель Белорусский национальный технический университет(57) 1. Гидропривод самоходной машины, содержащий связанный с двигателем регулируемый насос, два кинематически связанных с ведущими колесами самоходной машины гидромотора, связанных гидролиниями с регулируемым насосом, со сливом и между собой с возможностью параллельного или последовательного их соединения, рулевой механизм,отличающийся тем, что в гидролинии слива первого гидромотора и в напорной гидролинии второго гидромотора при их параллельном соединении установлены регулируемые пропорциональные гидродроссели, а при последовательном соединении гидромоторов в напорной гидролинии второго гидромотора установлен запорный клапан с электромагнитом, при этом электромагниты регулируемых пропорциональных гидродросселей и запорного клапана соединены с блоком электронного управления, связанного с установленными на обоих гидромоторах датчиками давления и датчиками частоты вращения валов. 11015 1 2008.08.30 2. Гидропривод по п. 1, отличающийся тем, что содержит датчик положения рулевого механизма, связанный с блоком электронного управления. Изобретение относится к машиностроению и может быть использовано в конструкции малогабаритных сельскохозяйственных тракторов и дорожно-строительных машин. Известен гидропривод самоходной машины 1, содержащий два и более гидромотора с параллельным и последовательным соединением гидромоторов. Недостатком гидропривода с параллельным соединением гидромоторов является отсутствие эффекта блокирования дифференциала ведущих колес с различными угловыми скоростями, например, при повороте самоходной машины. Недостатком гидропривода с последовательным соединением гидромоторов является то, что во второй, по ходу движения жидкости, гидромотор поступает меньшее количество жидкости на величину утечек в первом гидромоторе. Вследствие этого, при движении самоходной машины по прямой,угловые скорости и тяговые усилия правого и левого колес машины неодинаковы. Наиболее близким к заявленному изобретению является гидропривод самоходной машины 2, содержащий регулируемый насос, связанный с двигателем, два гидромотора,кинематически связанные с ведущими колесами самоходной машины, и гидравлически - с насосом, со сливом и между собой, рулевой механизм. К недостаткам этого гидропривода следует отнести невозможность плавного переключения режимов работы гидромоторов с параллельного на последовательный и, наоборот, на ходу самоходной машины и невозможность регулирования момента блокирования ведущих колес самоходной машины. В основу изобретения положена задача создания возможности плавного переключения режимов работы гидромоторов с параллельного на последовательный и, наоборот, на ходу самоходной машины и возможности регулирования момента блокирования дифференциала ведущих колес самоходной машины. Поставленная задача достигается тем, что гидропривод самоходной машины, содержащий связанный с двигателем регулируемый насос, два кинематически связанных с ведущими колесами самоходной машины гидромотора, связанных гидролиниями с регулируемым насосом, со сливом и между собой с возможностью параллельного или последовательного их соединения, рулевой механизм, причем в гидролинии слива первого гидромотора и в напорной гидролинии второго гидромотора при их параллельном соединении установлены регулируемые пропорциональные гидродроссели, а при последовательном соединении гидромоторов в напорной гидролинии второго гидромотора установлен запорный клапан с электромагнитом, при этом электромагниты регулируемых пропорциональных гидродросселей и запорного клапана соединены с блоком электронного управления, связанного с установленными на обоих гидромоторах датчиками давления и датчиками частоты вращения валов. Кроме того, гидропривод содержит датчик положения рулевого механизма, связанный с блоком электронного управления. Благодаря такому выполнению гидропривода самоходной машины получаем возможность плавного переключения режимов работы гидромоторов с параллельного на последовательный, и наоборот, на ходу самоходной машины и возможность регулирования момента блокирования ведущих колес самоходной машины. На чертеже представлена принципиальная схема гидропривода самоходной машины. Гидропривод самоходной машины включает регулируемый насос 1, связанный с двигателем 2, гидромоторы 3 и 4 привода колес 5 и 6, соединенные с регулируемым насосом 1 напорными гидролиниями 7 и 8 и сливными гидролиниями 9 и 10 при параллельном соединении гидромоторов 3 и 4 или напорными гидролиниями 7 и 11 и сливной гидролинией 9 при последовательном соединении гидромотором 3 и 4. Для изменения схемы подключения гидромоторов 3 и 4 установлены два пропорциональных дросселя 12 и 13 и запорный клапан 14. Дроссель 12 с электромагнитом 15 установлен после гидромотора 3 в 2 11015 1 2008.08.30 сливной гидролинии 10, дроссель 13 с электромагнитом 16 установлен в напорной гидролинии 8 перед гидромотором 4. Запорный клапан 14 установлен в гидролинии 11 перед гидромоторм 4. Гидромоторы 3 и 4 снабжены датчиками 17 и 18 давления и датчиками 19 и 20 угловых скоростей гидромоторов 3 и 4. Блок 21 электронного управления соединен с датчиками 17, 18, 19 и 20 и с электромагнитами 15 и 16 дросселей 12 и 13 и с электромагнитом (не показан) клапана 14. Рулевой механизм 22 снабжен датчиком 23 положения, соединенным с блоком 21. Устройство работает следующим образом. Трогание самоходной машины с места целесообразно осуществлять при максимальном моменте гидромоторов 3 и 4, т.е. при их параллельном соединении. Для этого клапан 14 должен быть закрытым, а дроссели 12 и 13 открытыми. При буксовании одного из колес самоходной машины ограничивают с помощью одного из дросселей 12 и 13 подачу потока рабочей жидкости в гидромотор этого колеса, чем достигается эффект блокирования дифференциала ведущих колес самоходной машины. При автоматическом управлении блоком 21 повышенное буксование определяется разностью сигналов датчиков 19 и 20 угловых скоростей гидромоторов. При достижении максимальной скорости на этом режиме открывают клапан 14, получая при этом эффект разомкнутого сцепления механической передачи, и плавно закрывают дроссели 12 и 11. Для большей плавности переключения режимов целесообразно уменьшить подачу топлива в двигатель 2 или уменьшить подачу насоса 1. При последовательном включении гидромоторов 3 и 4 и движении по прямой в гидромотор 4 поступает меньшее количество жидкости, по этой причине он не развивает крутящего момента и давление в гидролинии 11 падает вплоть до нуля. Для нормальной работы самоходной машины силы тяги на обоих колесах 5 и 6, а следовательно, и моменты на обоих гидромоторах 3 и 4 должны быть одинаковыми. Для создания одинаковых моментов на валах гидромоторов 3 и 4 необходимы одинаковые перепады давлений, т.е. разность давлений на входе и выходе гидромоторов. Для этого необходимо в гидролинии 11 поддерживать давление в 1/2 от давления в гидролиниях 7 и 8. Для контроля выполнения этого требования установлены датчики давления 17 и 18. Датчики 17 и 18 посылают сигнал в блок 21 электронного управления. Блок 21 подает команду электромагниту 16,управляющему дросселем 13. Дроссель 13 открывается до тех пор, пока давление на входе в гидромотор 4 не станет равным 1/2 давления на входе в гидромотор 3 и затем поддерживает это соотношение. Датчик 23 положения рулевого механизма 22 позволяет поддерживать минимальную разность угловых скоростей колес 5 и 6, необходимую для поворота самоходной машины,не допуская излишнего буксования одного из колес. Предложенный гидропривод самоходной машины способен обеспечить эффект полного и частичного блокирования дифференциала ведущих колес самоходной машины при параллельном соединении гидромоторов 3 и 4 и синхронную работу гидромоторов 3 и 4 при их последовательном соединении. Источники информации 1. Петров В.А, Гидрообъемные трансмиссии самоходных машин. - М. Машиностроение, 1988. - С. 101. 2. Львовский К.Я. и др. Трансмиссии тракторов. - М. Машиностроение, 1976. - С. 239,240. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 3
МПК / Метки
МПК: F15B 21/00, F16H 39/00, B60K 17/10
Метки: машины, самоходной, гидропривод
Код ссылки
<a href="https://by.patents.su/3-11015-gidroprivod-samohodnojj-mashiny.html" rel="bookmark" title="База патентов Беларуси">Гидропривод самоходной машины</a>
Гидропривод самоходной машины
Номер патента: U 3308
Опубликовано: 28.02.2007
Авторы: Королькевич Виктор Александрович, Королькевич Александр Викторович, Бартош Петр Романович, Маковский Максим Антонович, Шевченко Василий Савельевич
МПК: B60K 17/10
Метки: гидропривод, самоходной, машины
Текст:
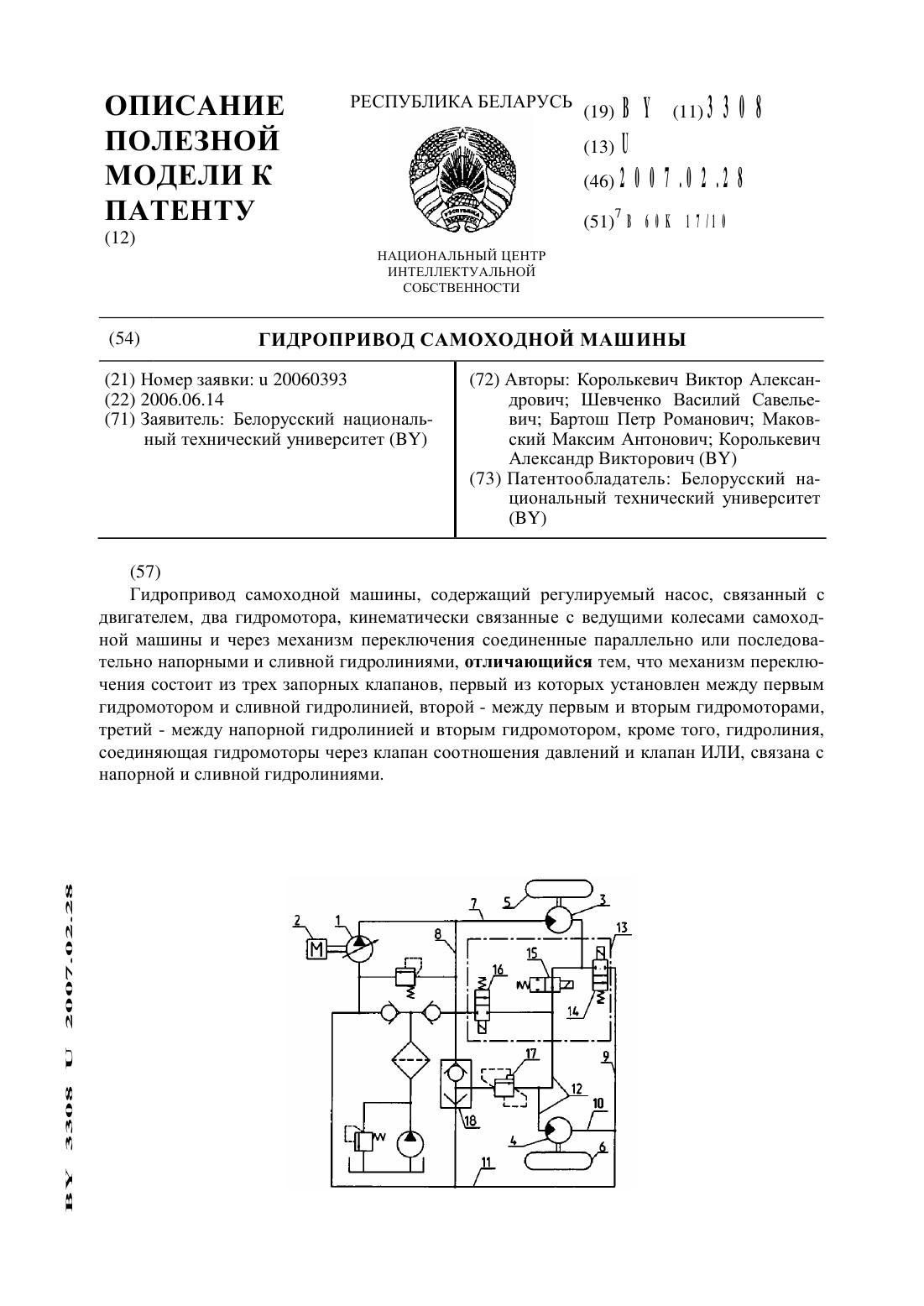
...механизм переключения соединены параллельно или последовательно напорными и сливной гидролиниями, механизм переключения состоит из трех запорных клапанов, первый из которых установлен между первым гидромотором и сливной гидролинией, второй - между первым и вторым гидромоторами, третий - между напорной гидролинией и вторым гидромотором, кроме того, гидролиния, соединяющая гидромоторы, через клапан соотношения давлений и клапан ИЛИ,связана с...
Гидропривод самоходной машины
Номер патента: 10962
Опубликовано: 30.08.2008
Авторы: Королькевич Виктор Александрович, Шевченко Василий Савельевич, Королькевич Александр Викторович, Бартош Петр Романович, Маковский Максим Антонович
МПК: F16H 39/00, B60K 17/10, F15B 21/00...
Метки: машины, самоходной, гидропривод
Текст:
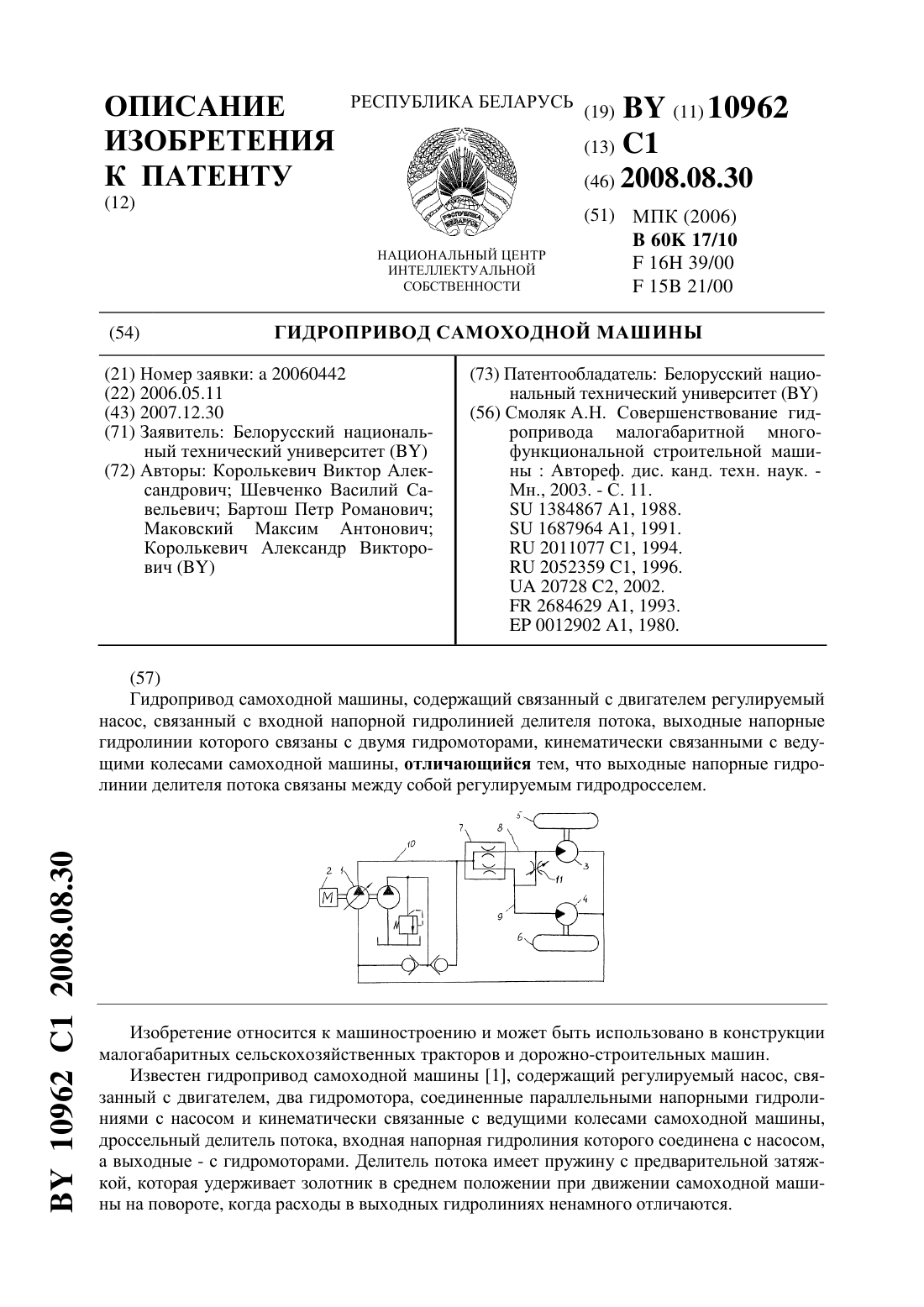
...а выходные - с гидромоторами. К недостаткам прототипа следует отнести отсутствие в схеме возможности получить бесступенчатое регулирование момента блокирования ведущих колес самоходной машины. Задача изобретения - обеспечение возможности бесступенчатого изменения момента блокирования ведущих колес самоходной машины. Поставленная задача достигается тем, что в гидроприводе самоходной машины, содержащем связанный с двигателем регулируемый насос,...
Гидропривод самоходной машины
Номер патента: 9101
Опубликовано: 30.04.2007
Авторы: Королькевич Александр Викторович, Резвинский Виктор Михайлович, Шевченко Василий Савельевич, Мелешко Михаил Григорьевич
МПК: B60K 17/10
Метки: самоходной, машины, гидропривод
Текст:
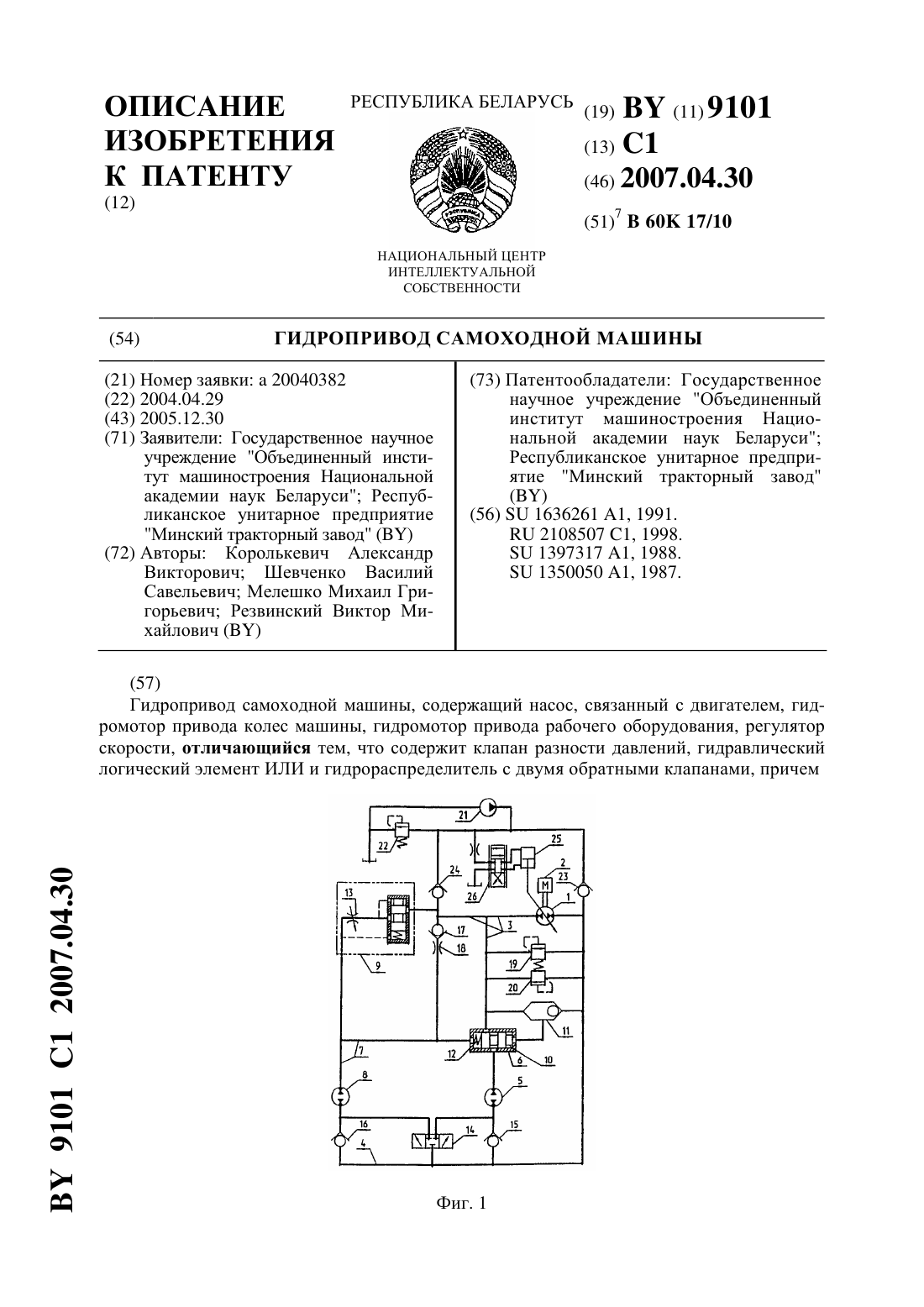
...оборудования при движении машины. Указанные варианты совместной работы машины и оборудования рассмотрим на режимах тяги, торможения гидроприводом и реверса. Движение машины при неработающем оборудовании. Для отключения рабочего оборудования достаточно полностью закрыть дроссели 13. В режиме движения давление,создаваемое насосом в гидролинии 3 через логический элемент ИЛИ 11, передается в торцовую полость 10 клапана 6 и, преодолевая усилие...
Гидропривод самоходной машины
Номер патента: U 1659
Опубликовано: 30.12.2004
Авторы: Шевченко Василий Савельевич, Мелешко Михаил Григорьевич, Королькевич Александр Викторович, Резвинский Виктор Михайлович
МПК: B60K 17/10
Метки: машины, гидропривод, самоходной
Текст:
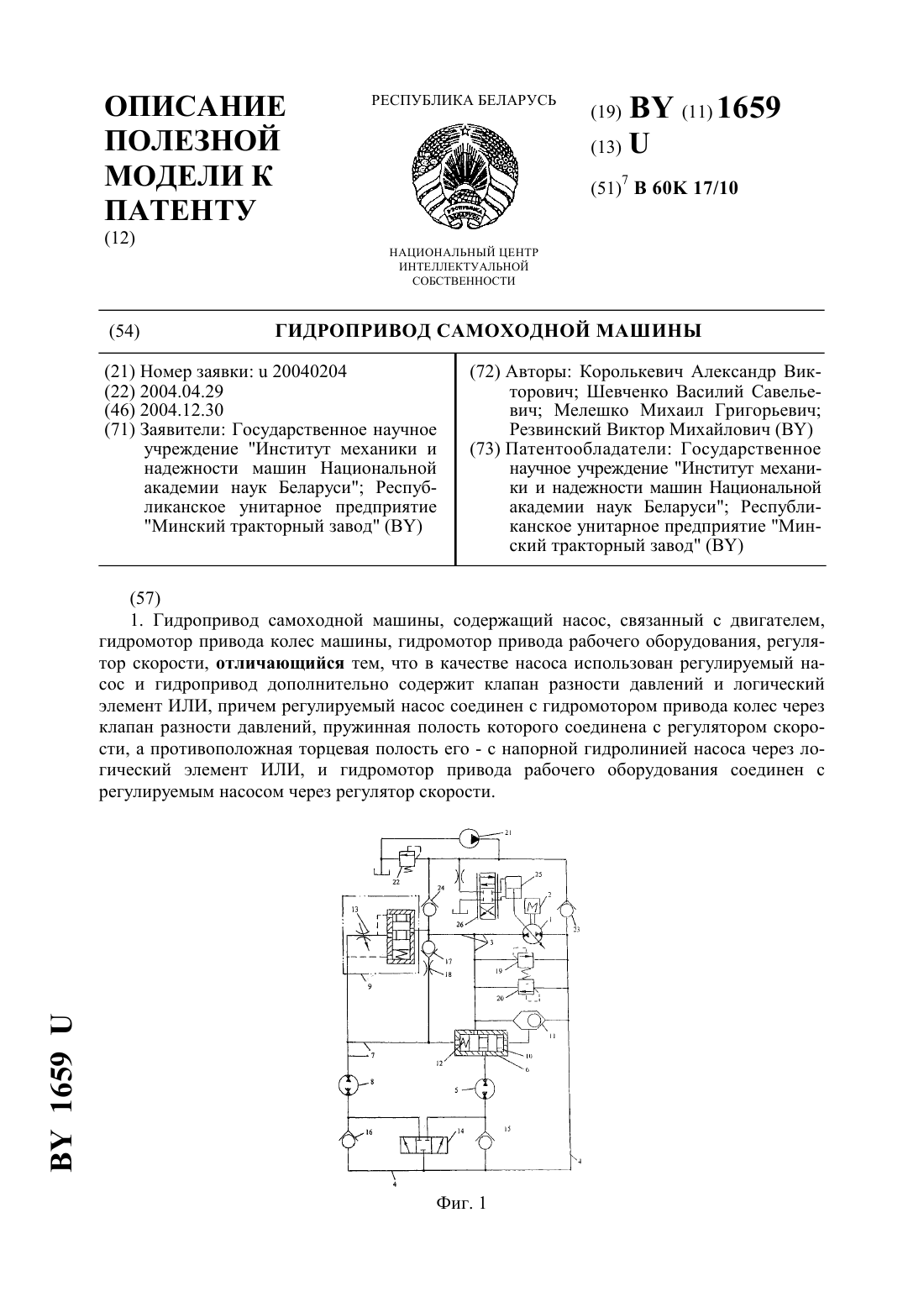
...Движение машины при неработающем рабочем оборудовании. Работа рабочего оборудования без движения машин. Работа рабочего оборудования при движении машины. Указанные варианты совместной работы машины и оборудования рассмотрим на режимах тяги, торможения гидроприводом и реверса. Движение машины при неработающем рабочем оборудовании. Для отключения рабочего оборудования достаточно полностью закрыть дроссель 13. При увеличении подачи насосом...
Гидропривод самоходной машины

Номер патента: 9413
Опубликовано: 30.06.2007
Авторы: Королькевич Александр Викторович, Брилевский Олег Валентинович, Шевченко Василий Савельевич
МПК: F02N 7/00, B60K 17/10
Метки: самоходной, машины, гидропривод
Текст:
...выполнен трехпозиционным с электромагнитом управления и содержит возвратную пружину и хвостовик с фиксатором среднего положения гидрораспределителя с электромагнитом управления, причем трехпозиционный гидрораспределитель первым входом соединен с подводящей, а первым выходом - с отводящей гидролиниями, вторым входом соединен с гидроаккумулятором высокого давления, а вторым выходом - со сливом, гидроаккумулятор низкого давления...
Предыдущий патент: Способ определения ошибки фокусировки светового потока и устройство для его реализации
Следующий патент: Ультразвуковой вискозиметр
Случайный патент: Шарнирная передача привода колеса автотранспортного средства