Система контроля для испытаний газотурбинного двигателя
Текст
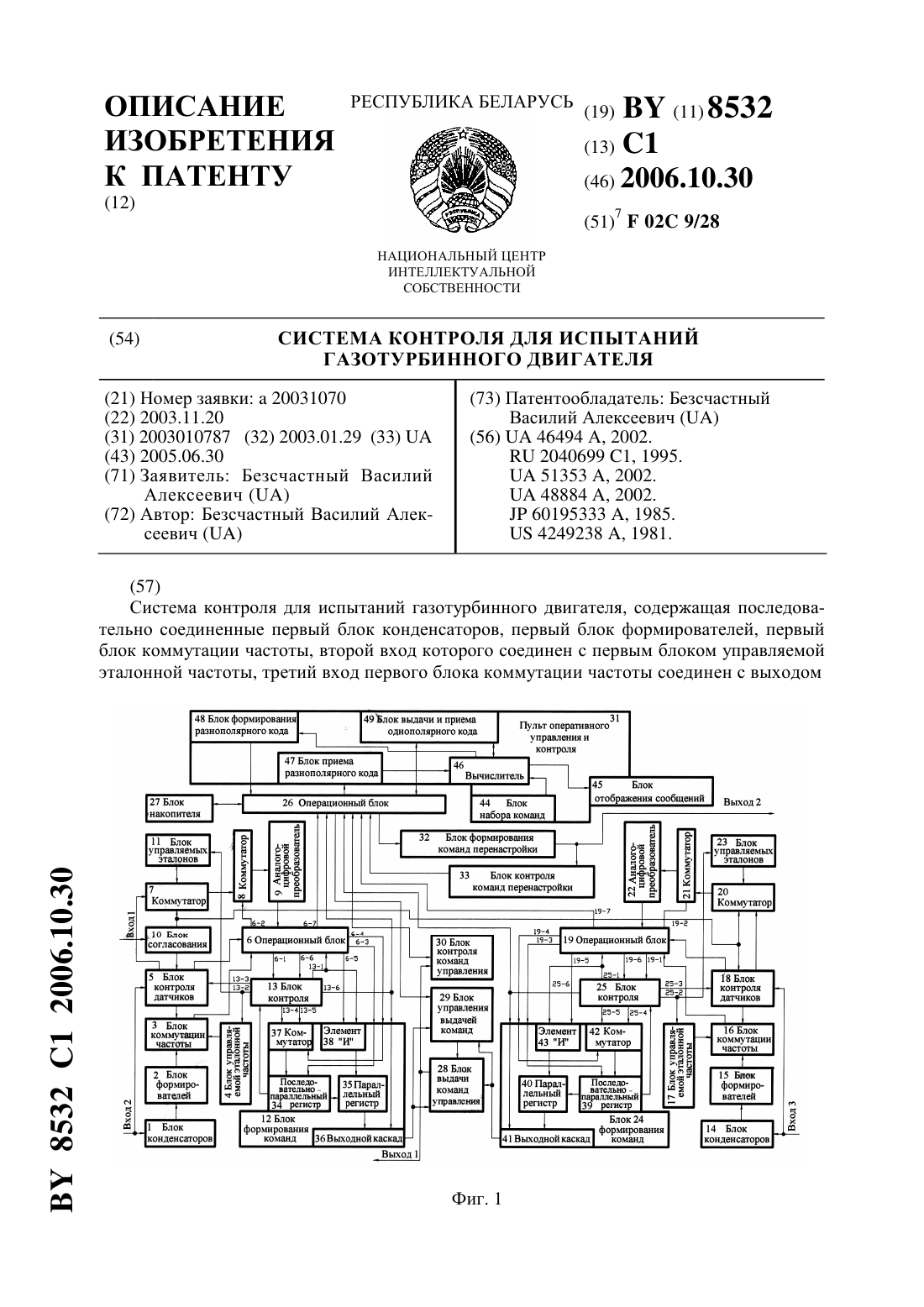
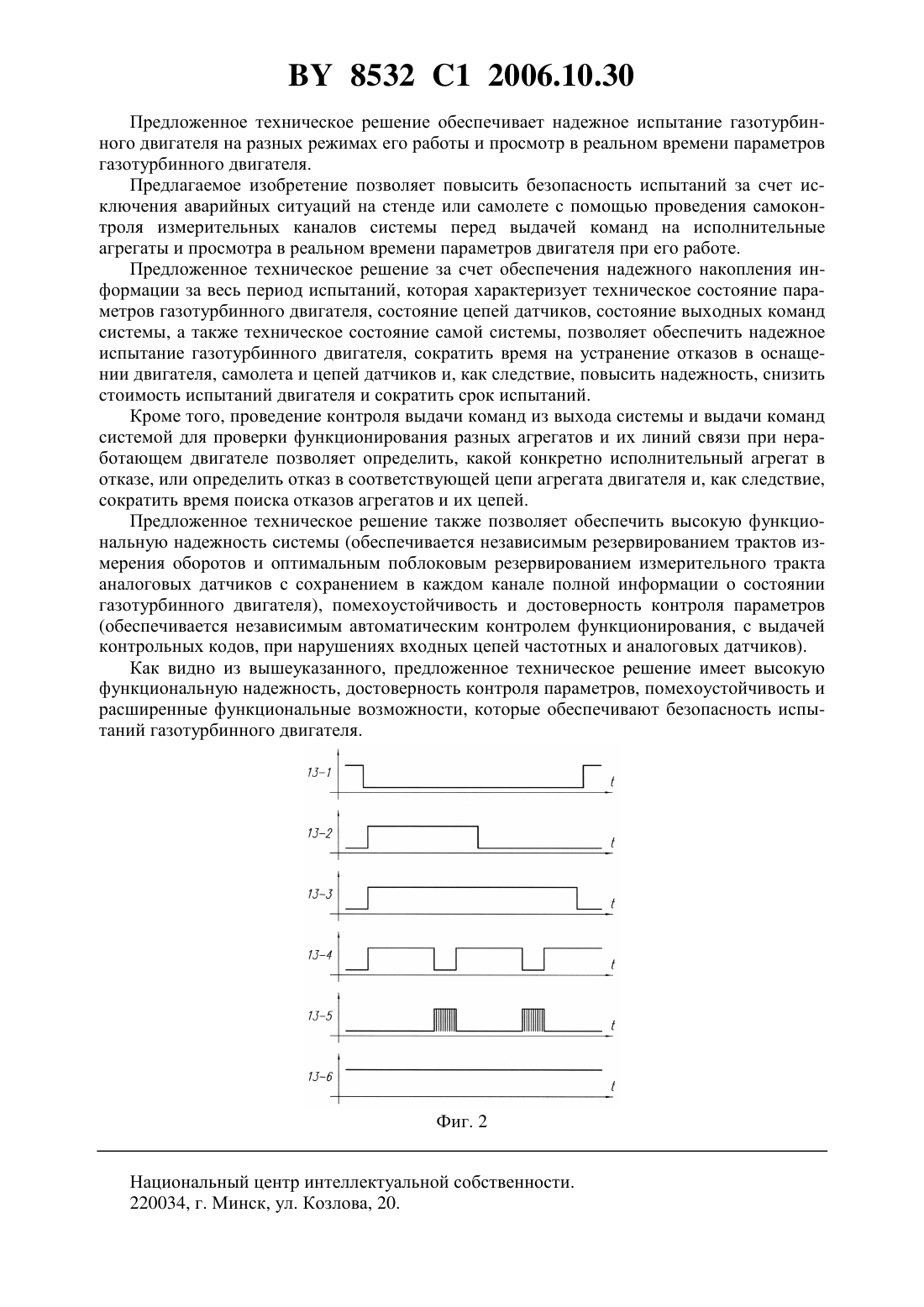
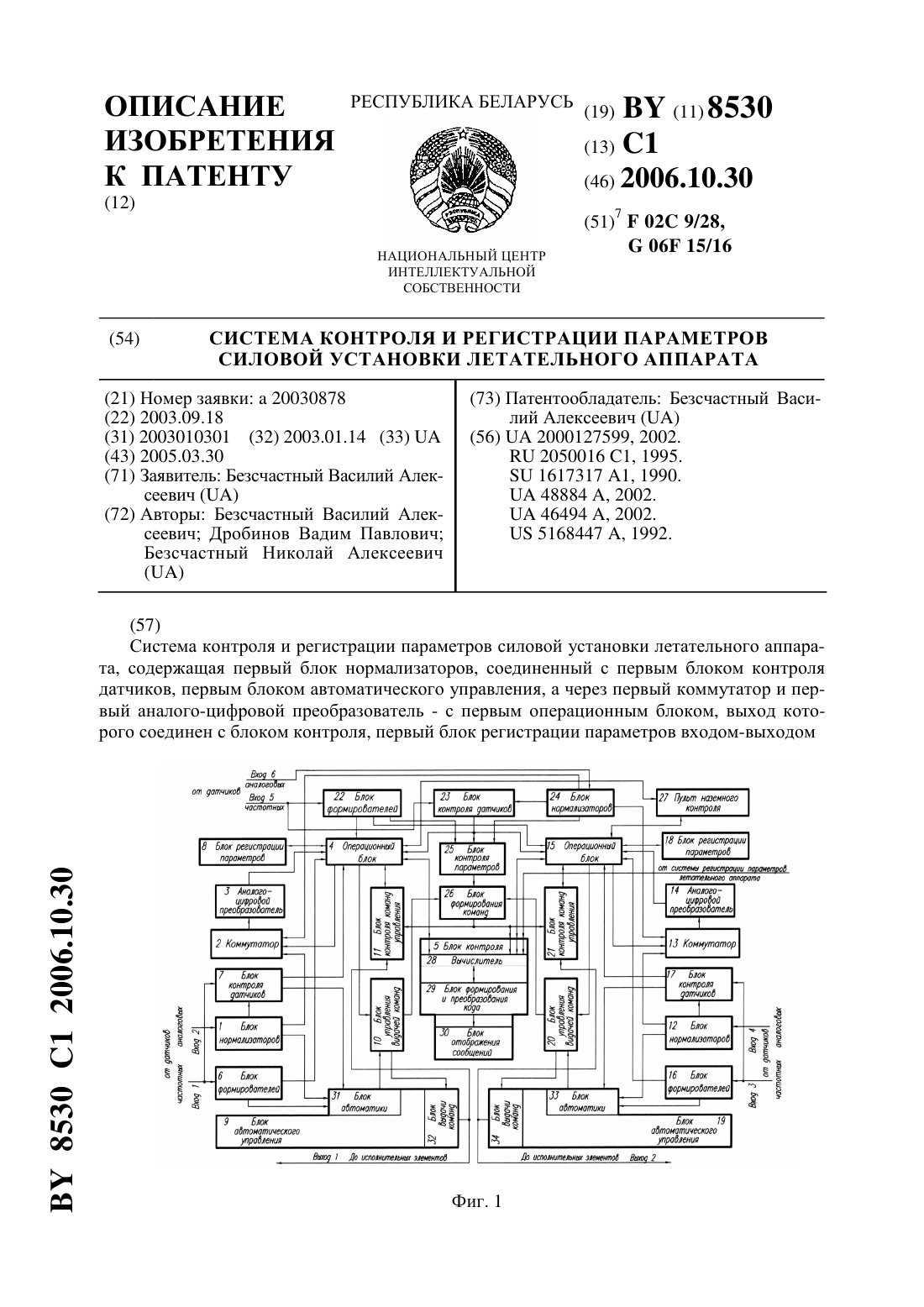
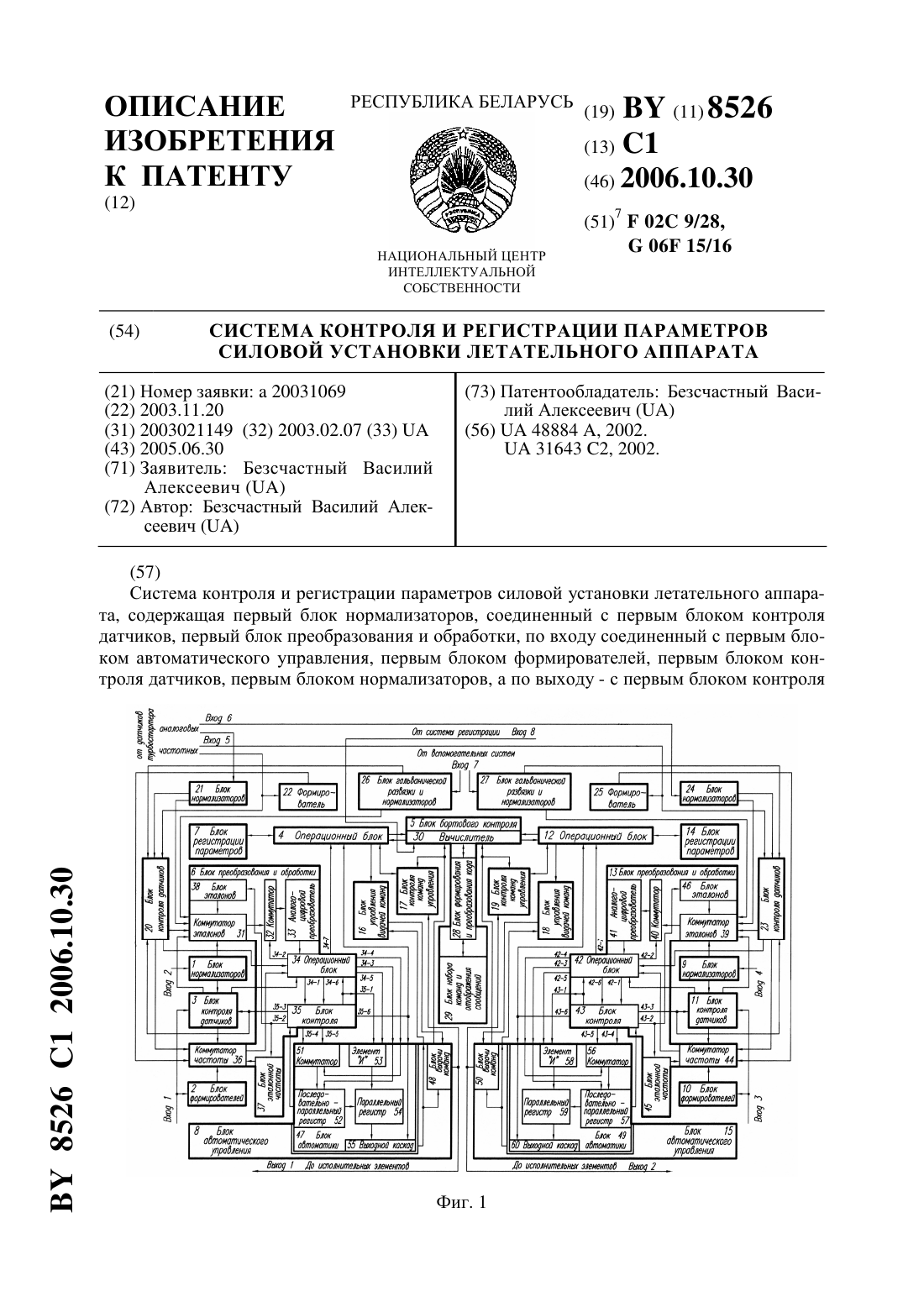
(51)02 9/28 НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СИСТЕМА КОНТРОЛЯ ДЛЯ ИСПЫТАНИЙ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ(71) Заявитель Безсчастный Василий Алексеевич(72) Автор Безсчастный Василий Алексеевич(73) Патентообладатель Безсчастный Василий Алексеевич(57) Система контроля для испытаний газотурбинного двигателя, содержащая последовательно соединенные первый блок конденсаторов, первый блок формирователей, первый блок коммутации частоты, второй вход которого соединен с первым блоком управляемой эталонной частоты, третий вход первого блока коммутации частоты соединен с выходом 8532 1 2006.10.30 первого блока контроля датчиков, а выход первого блока коммутации частоты соединен с первым операционным блоком, второй вход которого соединен со вторым выходом блока контроля датчиков, третий выход которого через первый, второй коммутаторы и первый аналого-цифровой преобразователь соединен с третьим входом первого операционного блока, первый вход блока согласования соединен с первым входом системы, а выходы соединены с первым блоком контроля датчиков и первым коммутатором, третий вход которого соединен с блоком управляемых эталонов, выходы первого операционного блока соединены со вторым коммутатором, третьим операционным блоком, первым блоком формирования команд и первым блоком контроля, выходы которого соединены с первым блоком управляемой эталонной частоты, первым блоком управляемых эталонов, первым блоком контроля датчиков, первым блоком формирования команд, первым и третьим операционными блоками, а вход первого блока контроля соединен с первым блоком формирования команд, вход первого блока конденсаторов и третий вход первого блока контроля датчиков соединены между собой и со вторым входом системы, второй блок конденсаторов через второй блок формирователей соединен со вторым блоком коммутации частоты,второй вход которого соединен со вторым блоком управляемой эталонной частоты, третий вход второго блока коммутации частоты соединен с выходом второго блока контроля датчиков, а выход второго блока коммутации частоты соединен со вторым операционным блоком, второй вход которого соединен со вторым выходом второго блока контроля датчиков, третий выход которого через третий, четвертый коммутаторы и второй аналогоцифровой преобразователь соединен с третьим входом второго операционного блока, второй блок контроля датчиков и третий коммутатор соединены с выходом блока согласования, третий вход третьего коммутатора соединен с блоком управляемых эталонов, выходы второго операционного блока соединены с четвертым коммутатором, третьим операционным блоком, вторым блоком формирования команд и вторым блоком контроля, выходы которого соединены со вторым блоком управляемой эталонной частоты, вторым блоком управляемых эталонов, вторым блоком контроля датчиков, вторым блоком формирования команд, вторым и третьим операционными блоками, а вход второго блока контроля соединен со вторым блоком формирования команд, вход второго блока конденсаторов и третий вход второго блока контроля датчиков соединены между собой и с третьим входом системы, первый и второй блоки формирования команд соединены с блоком выдачи команд управления и блоком управления выдачей команд, выход которого через блок выдачи команд управления соединен с первым выходом системы и входом блока контроля команд управления, вход которого соединен со входом-выходом третьего операционного блока, выход которого соединен со входом блока управления выдачей команд, третий операционный блок и блок накопителя входами-выходами соединены между собой, отличающаяся тем, что содержит пульт оперативного управления и контроля, блок формирования команд перенастройки и блок контроля команд перенастройки, пульт оперативного управления и контроля входами-выходами соединен с третьим операционным блоком, последний выход которого через блок формирования команд перенастройки и блок контроля команд перенастройки соединен со своим входом, выход блока формирования команд перенастройки соединен со вторым выходом системы. Изобретение касается области газотурбинного двигателестроения, а именно систем управления, контроля и испытаний газотурбинного двигателя. Наиболее близкой по технической сущности и достигаемому эффекту по отношению к заявленному техническому решению является Система автоматического управления,контроля и регистрации параметров газотурбинного двигателя (Декларационный патент Украины 46494 А, МПК 02 9/28, 2002) которая содержит последовательно соединенные первые блок конденсаторов, блок формирователей, блок коммутации частоты, второй 2 8532 1 2006.10.30 вход которого соединен с первым блоком управляемой эталонной частоты, третий вход первого блока коммутации частоты соединен с выходомпервого блока контроля датчиков(включает первый блок контроля входных цепей, блок управляемых согласующих устройств, блок компараторов, блок одновибраторов, блок элементов ИЛИ, блок элементов И, блок сигнализаторов и многоканальный источник напряжения), а его выход соединен с первым операционным блоком, а третий выход блока контроля датчиков через первый,второй коммутаторы и первый аналого-цифровой преобразователь соединен с третьим входом первого операционного блока, первый вход блока согласования соединен с первым входом системы, а выход соединен с первым блоком контроля датчиков и первым коммутатором, третий вход которого соединен с блоком управляемых эталонов, последние выходы первого операционного блока соединены со вторым коммутатором, третьим операционным блоком, первым блоком формирования команд и первым блоком контроля,выходы которого соединены с первым блоком управляемой эталонной частоты, первым блоком управляемых эталонов, первым блоком контроля датчиков, первым блоком формирования команд, первым и третьим операционными блоками, а его входы соединены с блоком формирования команд и первым операционным блоком, вход первого блока конденсаторов и третий вход первого блока контроля датчиков соединены между собой и со вторым входом системы, второй блок конденсаторов через второй блок формирователей соединен со вторым блоком коммутации частоты, второй вход которого соединен со вторым блоком управляемой эталонной частоты, третий вход второго блока коммутации частоты соединен с выходом второго блока контроля датчиков (включает второй блок контроля входных цепей, второй блок управляемых согласующих устройств, второй блок компараторов, второй блок одновибраторов, второй блок элементов ИЛИ, второй блок элементов И, второй блок сигнализаторов), а его выход соединен со вторым операционным блоком, а третий выход блока контроля датчиков через третий, четвертый коммутаторы и второй аналого-цифровой преобразователь соединен с третьим входом второго операционного блока, второй блок контроля датчиков и третий коммутатор соединены с выходом блока согласования, третий вход третьего коммутатора соединен с блоком управляемых эталонов, последние выходы второго операционного блока соединены с четвертым коммутатором, третьим операционным блоком, вторым блоком формирования команд и вторым блоком контроля, выходы которого соединены со вторым блоком управляемой эталонной частоты, вторым блоком управляемых эталонов, вторым блоком контроля датчиков, вторым блоком формирования команд, вторым и третьим операционными блоками, а его входы соединены с блоком формирования команд и вторым операционным блоком, вход второго блока конденсаторов и третий вход второго блока контроля датчиков соединены между собой и с третьим входом системы, первый и второй блоки формирования команд соединены с блоком выдачи команд управления и блоком управления выдачей команд, выход которого через блок выдачи команд соединен с выходом системы и входом блока контроля команд управления, вход которого соединен со входом-выходом третьего операционного блока, выход которого соединен с последним входом блока управления выдачей команд. Указанная система не может быть применена для наземных испытаний газотурбинного двигателя в связи с невозможностью влиять на систему регулирования (предельных регуляторов) газотурбинного двигателя изменяя режим его работы, например, с боевого на учебный или наоборот. Она также не может представлять в реальном времени значения параметров газотурбинного двигателя при его испытании. Режим работы газотурбинного двигателя учебный зависит от настройки системы регулирования и характеризуется сниженными уровнями ограничений системой регулирования параметров газотурбинного двигателя, который дает возможность эксплуатировать газотурбинный двигатель в экономном режиме, который в свою очередь обеспечивает продленный ресурс газотурбинного двигателя. 3 8532 1 2006.10.30 Режим работы газотурбинного двигателя боевой зависит от настройки системы регулирования и характеризуется повышенными уровнями ограничения системой регулирования параметров газотурбинного двигателя, который обеспечивает интенсивную эксплуатацию газотурбинного двигателя, т.е. эксплуатацию на максимально допустимых режимах, которые в свою очередь интенсивно снижают ресурс газотурбинного двигателя. Режим работы газотурбинного двигателя учебный может использоваться, например,при выполнении тренировочных полетов, а боевой - при выполнении задач, связанных с применениями самолета в критических условиях. При эксплуатации газотурбинного двигателя на летательных аппаратах применяются указанные выше режимы для достижения оптимального сочетания, с одного стороны, достаточного ресурса двигателя, а с другой - финансовых затрат на его эксплуатацию. Режимы работы газотурбинного двигателя боевой или учебный зависят от перенастройки системы регулирования на боевой или учебный режим. Для обеспечения надежной эксплуатации газотурбинного двигателя на указанных выше режимах необходимо на предприятиях-изготовителях при изготовлении или после ремонта, в эксплуатации при регламентных работах проводить испытания газотурбинного двигателя на выше указанных режимах. Предложенное изобретение направлено на создание системы, которая должна, с одной стороны, обеспечить контроль и регистрацию параметров газотурбинного двигателя, а с другой - обеспечить изменение режима функционирования системы регулирования газотурбинного двигателя и представление в реальном времени значений его параметров при наземных испытаниях на предприятиях-изготовителях двигателей или в эксплуатации на регламентных работах. Целью предлагаемого изобретения является расширение функциональных возможностей, области применения системы и обеспечение испытаний газотурбинного двигателя на разных режимах работы с представлением в реальном времени значений его параметров. Поставленная цель достигается тем, что в известную систему, содержащую последовательно соединенные первый блок конденсаторов, первый блок формирователей, первый блок коммутации частоты, второй вход которого соединен с первым блоком управляемой эталонной частоты, третий вход первого блока коммутации частоты соединен с выходом первого блока контроля датчиков, а выход первого блока коммутации частоты соединен с первым операционным блоком, второй вход которого соединен со вторым выходом блока контроля датчиков, третий выход которого через первый, второй коммутаторы и первый аналого-цифровой преобразователь соединен с третьим входом первого операционного блока, первый вход блока согласования соединен с первым входом системы, а выходы соединены с первым блоком контроля датчиков и первым коммутатором, третий вход которого соединен с блоком управляемых эталонов, выходы первого операционного блока соединены со вторым коммутатором, третьим операционным блоком, первым блоком формирования команд и первым блоком контроля, выходы которого соединены с первым блоком управляемой эталонной частоты, первым блоком управляемых эталонов, первым блоком контроля датчиков, первым блоком формирования команд, первым и третьим операционными блоками, а вход первого блока контроля соединен с первым блоком формирования команд, вход первого блока конденсаторов и третий вход первого блока контроля датчиков соединены между собой и со вторым входом системы, второй блок конденсаторов через второй блок формирователей соединен со вторым блоком коммутации частоты,второй вход которого соединен со вторым блоком управляемой эталонной частоты, третий вход второго блока коммутации частоты соединен с выходом второго блока контроля датчиков, а выход второго блока коммутации частоты соединен со вторым операционным блоком, второй вход которого соединен со вторым выходом второго блока контроля датчиков, третий выход которого через третий, четвертый коммутаторы и второй аналогоцифровой преобразователь соединен с третьим входом второго операционного блока, вто 4 8532 1 2006.10.30 рой блок контроля датчиков и третий коммутатор соединены с выходом блока согласования, третий вход третьего коммутатора соединен с блоком управляемых эталонов, выходы второго операционного блока соединены с четвертым коммутатором, третьим операционным блоком, вторым блоком формирования команд и вторым блоком контроля, выходы которого соединены со вторым блоком управляемой эталонной частоты, вторым блоком управляемых эталонов, вторым блоком контроля датчиков, вторым блоком формирования команд, вторым и третьим операционными блоками, а вход второго блока контроля соединен со вторым блоком формирования команд, вход второго блока конденсаторов и третий вход второго блока контроля датчиков соединены между собой и с третьим входом системы, первый и второй блоки формирования команд соединены с блоком выдачи команд управления и блоком управления выдачей команд, выход которого через блок выдачи команд соединен с первым выходом системы и входом блока контроля команд управления,вход которого соединен со входом-выходом третьего операционного блока, выход которого соединен с последним входом блока управления выдачей команд, третий операционный блок и блок накопителя входами-выходами соединены между собой, дополнительно введены пульт оперативного управления и контроля, блок формирования команд перенастройки и блок контроля команд перенастройки, пульт оперативного управления и контроля входами-выходами соединен с третьим операционным блоком, последний выход которого через блок формирования команд перенастройки и блок контроля команд перенастройки соединен со своим входом, выход блока формирования команд перенастройки соединен со вторым выходом системы. Введение в систему дополнительных признаков, а именно пульта оперативного управления и контроля, блока формирования команд перенастройки и блока контроля команд перенастройки, позволяет обеспечить изменение режима работы газотурбинного двигателя на боевой или учебный при наземных его испытаниях на предприятиях-изготовителях двигателей или в эксплуатации при выполнении регламентных работ. Как видно из вышеупомянутого, предложенное техническое решение имеет существенные признаки, которые позволяют расширить функциональные возможности, область применения системы и обеспечить испытание газотурбинного двигателя, с представлением в реальном времени значений его параметров, на разных режимах работы в зависимости от перенастройки системы регулирования. Принцип работы системы объясняется чертежами, где на фиг. 1 представлена структурная схема системы на фиг. 2 - диаграмма работы первого и второго блока контроля. Система содержит первый блок 1 конденсаторов, первый блок 2 формирователей, первый блок 3 коммутации частоты, первый блок 4 управляемой эталонной частоты, первый блок 5 контроля датчиков, первый операционный блок 6, первый коммутатор 7, второй коммутатор 8, первый аналого-цифровой преобразователь 9, блок 10 согласования, первый блок 11 управляемых эталонов, первый блок 12 формирования команд, первый блок 13 контроля, второй блок 14 конденсаторов, второй блок 15 формирователей, второй блок 16 коммутации частоты, второй блок 17 управляемой эталонной частоты, второй блок 18 контроля датчиков, второй операционный блок 19, третий коммутатор 20, четвертый коммутатор 21, второй аналого-цифровой преобразователь 22, второй блок 23 управляемых эталонов, второй блок 24 формирования команд, второй блок 25 контроля, третий операционный блок 26, блок 27 накопителя, блок 28 выдачи команд управления, блок 29 управления выдачей команд, блок 30 контроля команд управления, пульт 31 оперативного управления и контроля, блок 32 формирования команд перенастройки и блок 33 контроля команд перенастройки. Блок 12 (24) формирования команд включает последовательно-параллельный регистр 34 (39), параллельный регистр 35 (40), выходной каскад 36 (41), коммутатор 37 (42),элемент 38 (43) И. 5 8532 1 2006.10.30 Пульт 31 оперативного управления и контроля включает блок 44 набора команд, блок 45 отображения сообщений, вычислитель 46, блок 47 приема разнополярного кода, блок 48 формирования разнополярного кода, блок 49 выдачи и приема однополярного кода. Необходимость использования такой структуры пульта 31 оперативного управления и контроля (наличие в составе пульта блока 47 приема разнополярного кода и блока 48 формирования разнополярного кода) вызвано необходимостью удаления его от двигателя или самолета, на котором проводятся испытания двигателя, на расстояние не меньше как на 20-25 метров с точки зрения безопасности оператора. Как известно, разнополярный код имеет высокую помехоустойчивость и надежно пересылает информацию на значительное расстояние. Блок 1 конденсаторов через блок 2 формирователей соединен с блоком 3 коммутации частоты, второй вход которого соединен с первым блоком 4 управляемой эталонной частоты,третий вход первого блока 3 коммутации частоты соединен с выходом первого блока 5 контроля датчиков, а выход блока 3 коммутации частоты соединен с первым операционным блоком 6, второй вход которого соединен со вторым выходом блока 5 контроля датчиков, а его третий выход через первый коммутатор 7, второй коммутатор 8 и первый аналого-цифровой преобразователь 9 соединен с третьим входом первого операционного блока 6, первый вход блока 10 согласования соединен с первым входом системы, а выход соединен с первым блоком 5 контроля датчиков и первым коммутатором 7, третий вход которого соединен с первым блоком 11 управляемых эталонов, последние выходы первого операционного блока 6 соединены со вторым коммутатором 8, третьим операционным блоком 26, первым блоком 12 формирования команд и первым блоком 13 контроля, выходы которого соединены с первым блоком 4 управляемой эталонной частоты, первым блоком 11 управляемых эталонов, первым блоком 5 контроля датчиков, первым блоком 12 формирования команд, первым операционным блоком 6 и третьим операционным блоком 26, вход блока 13 контроля соединен с блоком 12 формирования команд, вход блока 1 конденсаторов и третий вход первого блока 5 контроля датчиков соединены между собой и со вторым входом системы, второй блок 14 конденсаторов через второй блок 15 формирователей соединен со вторым блоком 16 коммутации частоты, второй вход которого соединен со вторым блоком 17 управляемой эталонной частоты, третий вход второго блока 16 коммутации частоты соединен с выходом второго блока 18 контроля датчиков, а выход блока 16 коммутации частоты соединен со вторым операционным блоком 19, второй вход которого соединен со вторым выходом второго блока 18 контроля датчиков, а его третий выход через третий коммутатор 20, четвертый коммутатор 21 и второй аналого-цифровой преобразователь 22 соединен с третьим входом второго операционного блока 19, второй блок 18 контроля датчиков и третий коммутатор 20 соединены с выходом блока 10 согласования,третий вход третьего коммутатора 20 соединен со вторым блоком 23 управляемых эталонов, последние выходы второго операционного блока 19 соединены с четвертым коммутатором 21, третьим операционным блоком 26, вторым блоком 24 формирования команд и вторым блоком 25 контроля, выходы которого соединены со вторым блоком 17 управляемой эталонной частоты, вторым блоком 23 управляемых эталонов, вторым блоком 18 контроля датчиков, вторым блоком 24 формирования команд, вторым операционным блоком 19 и третьим операционным блоком 26, вход блока 25 контроля соединен с блоком 24 формирования команд, вход второго блока 14 конденсаторов и третий вход второго блока 18 контроля датчиков соединены между собой и с третьим входом системы, первый блок 12 формирования команд и второй блок 24 формирования команд соединены с блоком 28 выдачи команд управления и блоком 29 управления выдачей команд, выход которого через блок 28 выдачи команд управления соединен с выходом системы и входом блока 30 контроля команд управления, вход-выход которого соединен с выходом-входом третьего операционного блока 26, выход которого соединен с последним входом блока 29 управления выдачей команд, третий операционный блок 26 и блок 27 накопителя входами-выходами 6 8532 1 2006.10.30 соединены между собой, пульт 31 оперативного управления и контроля входами-выходами соединен с операционным блоком 26, выход которого через блок 32 формирования команд перенастройки и блок 33 контроля команд перенастройки соединен со своим входом. Коммутатор 37(42) блока 12(24) формирования команд соединен с выходами блока контроля 13(25) и операционного блока 6(19), а выход через последовательно-параллельный регистр 34(39) соединен со входом блока 13(25) контроля, параллельный регистр 35(40) блока 12(24) соединен с элементом 38(43) И, а через регистр 34(39) - с операционным блоком 6(19), выход регистра 35(40) блока 12(24) через выходной каскад 36(41) соединен с блоком 28 выдачи команд управления и блоком 29 управления выдачей команд, последний вход выходного каскада 36(41) блока 12(24) соединен с выходом блока 13(25) контроля, а входы элемента 38(43) И блока 12(24) соединены с выходами операционного блока 6(19) и блока 13(25) контроля. Блок 19 согласования предназначен для согласования выходных сопротивлений датчиков, обеспечивающих тарировочные характеристики, и может представлять собой, например,набор прецезионных резисторов, делителей напряжения, преобразователей переменного напряжения в постоянное, усилителей и нормализаторов, преобразователей сопротивления в напряжение, резистивно-емкостных фильтров бортовых помех и т.д. Количество каналов в блоке 10 согласования соответствует количеству контролируемых параметров газотурбинного двигателя, причем высокая функциональная надежность контроля очень важных аналоговых параметров обеспечивается резервированием преобразователей, нормализаторов, усилителей и т.п. в блоке 10 согласования. Блоки 11 и 23 управляемых эталонов могут быть предоставлены как набор эталонных источников напряжения и тока, эталонных резисторов и т.п. Коммутаторы 7, 20 и коммутаторы блоков 3, 16 могут быть реализованы на базе стандартных одноканальных управляемых ключей. Блоки 5 и 18 контроля датчиков могут быть выполнены используя как техническое решение по а.с. СССР 1339459, МПК 0131/02 1987 (для контроля частотных датчиков), так и компараторы в интегральном исполнении (для контроля аналоговых датчиков). Операционные блоки 6, 19 и 26 могут быть реализованы на базе стандартных многофункциональных процессоров, которые могут использовать как внутреннюю, так и внешнюю память (на чертеже не показано), которые также имеют, кроме вычислительных функций, функцию измерения временных интервалов, а также функцию приема и выдачи кодовых и одиночных сигналов. Блоки 13 и 25 контроля могут быть реализованы на стандартных процессорах. Блок 29 управления выдачей команд и блок 32 формирования команд перенастройки могут быть реализованы на базе стандартных последовательно-параллельных регистров. Блок 30 контроля команд управления и блок 33 контроля команд перенастройки могут быть реализованы на базе стандартных параллельно-последовательных регистров и элементов гальванической развязки. Блок 27 накопителя может быть реализован на базе стандартных элементов флэшпамяти. Блок 28 выдачи команд управления может быть реализован на базе стандартных электронных и релейных компонентов. Пульт 31 оперативного управления и контроля может быть реализован на базе стандартного портативного комплекта персонального компьютера. Блок 44 набора команд по выходу, а блок 45 отображения сообщений по входу соединены с вычислителем 46 пульта 31 оперативного управления и контроля, второй вход вычислителя 46 через блок 47 приема разнополярного кода соединен с выходом операционного блока 26, вход которого через блок 48 формирования разнополярного кода соединен с выходом вычислителя 46, блок 49 выдачи и приема однополярного кода пульта 31 оперативного управления и контроля входами-выходами соединен с операционным блоком 26 и вычислителем 46 пульта 31 оперативного управления и контроля. 7 8532 1 2006.10.30 Количество каналов в блоке 10, блоках 5, 18 и количество каналов управляемых ключей коммутаторов 7 и 20 отвечает количеству контролируемых аналоговых параметров, а соответственно и количеству контролируемых цепей аналоговых датчиков газотурбинного двигателя. Количество каналов в блоках 2 и 15 формирователей, блоках 3 и 16 коммутации частоты, а также количество пар конденсаторов в блоках 1 и 14 соответствует количеству контролируемых частотных параметров в любом из входов, а соответственно и количеству каналов в блоках 5 и 18 контроля цепей датчиков оборотов газотурбинного двигателя. Система работает следующим образом. При включении напряжения питания блоки 12, 24, 28, 29, 30 и 32 устанавливаются в начальное состояние, обеспечивающее отсутствие на их выходах информационных сигналов, например, в виде логической 1, операционный блок 26, пульт 31 оперативного управления и контроля, блоки 13 и 25 контроля, а также операционные блоки 6, 19 устанавливаются в начальное состояние и с интервалом времени, которое превышает переходные процессы в системе, выдают сигналы на блоки 13 и 25 контроля соответственно,обеспечивая проведение независимого контроля функционирования каждого канала системы, а также проверку блоков 5 и 18, которые контролируют цепи датчиков. Рассмотрим работу системы в режиме проведения самоконтроля на примере измерительного канала операционного блока 6 (в скобках будут указаны соответствующие блоки измерительного канала операционного блока 19). Из выхода 6-1(19-1) операционного блока 6(19) поступает сигнал в вход блока 13(25) контроля, под действием которого он начинает функционировать по следующему алгоритму. Из выхода 13-1(25-1) блока 13(25) контроля к операционному блоку 6(19) поступает сигнал, например, в виде логического 0 (фиг. 2), что свидетельствует о начале функционирования блока 13(25) по выдаче сигналов для проведения самоконтроля и обеспечивает переход работы операционного блока 6(19) в режим самоконтроля. Кроме того, из выхода 13-1(25-1) блока 13(25) контроля до элемента 38 (43) И блока 12(24) формирования команд поступает сигнал, который запрещает прохождение сигнала с выхода 6-5 (19-5) операционного блока 6 (19). Из выхода 13-2(25-2) блока 13(25) контроля до блока 4(17) управляемой эталонной частоты и блока 11(23) управляемых эталонов поступает сигнал, например, в виде логической 1, что обеспечивает на выходе блока 4(17) максимальные эталонные частоты, а на выходе блока 11(23) - максимальные эталонные напряжения, которые превышают предельные значения контролируемых параметров газотурбинного двигателя. Из выхода 13-3(25-3) блока 13(25) контроля поступает сигнал, например, в виде логической 1 на вход блока 5(18) контроля датчиков и независимо от состояния цепей аналоговых и частотных датчиков устанавливает его в режим, имитирующий нарушение входных цепей аналоговых и частотных датчиков, при этом на его выходе получим сигналы, например, в виде логической 1, которые поступают в входы коммутатора 7(20), блока 3(16) коммутации частоты и операционного блока 6(19) для обеспечения контроля функционирования системы. Из выхода 13-4(25-4) блока 13(25) контроля поступает сигнал, например, в виде логической 1 на вход коммутатора 37(42) блока 12(24) формирования команд, который обеспечивает прохождение через него тактовой частоты из выхода 6-4(19-4) операционного блока 6(19). При поступлении сигналов, например, в виде логической 1 из выхода блока 5(18) на вход коммутатора 7(20) последний отключает вход коммутатора 8(21) от выходов блока 10 согласования и подключает выходы блока 11(23) управляемых эталонов на вход коммутатора 8(21). При этом максимальные эталонные напряжения через коммутатор 7(20) поступают на коммутатор 8(21) и в результате на его выходе устанавливаются максимальные контрольные значения постоянного напряжения. Из выхода 6-2(19-2) блока 6(19) на 8 8532 1 2006.10.30 вход коммутатора 8(21) поступают сигналы, например, в виде двоичного кода параллельного или последовательного, которые обеспечивают поочередное подключение максимальных контрольных значений напряжения из выхода коммутатора 7(20) через коммутатор 8(21) к аналого-цифровому преобразователю 9(22), в котором максимальное контрольное напряжение преобразуется в двоичный контрольный код. После каждого подключения максимального контрольного напряжения, а соответственно и после каждого его преобразования преобразователем 9(22) с интервалом времени, превышающим переходные процессы в коммутаторе 8(21) и аналого-цифровом преобразователе 9(22), операционный блок 6(19) записывает в свою память максимальные значения контрольного кода. После преобразования максимальных контрольных напряжений из выхода коммутатора 7(20) и записи максимальных контрольных кодов в память операционного блока 6(19) снимается сигнал из выхода 6-2(19-2) блока 6(19) и обеспечивается запись блоком 6(19) в своей памяти сигналов имитации нарушения входных цепей аналоговых датчиков, в виде логической 1,из выхода блока 5(18) контроля датчиков. Из выхода блока 5(18), как было выше указано, на вход блока 3(16) коммутации частоты поступает сигнал логической 1, что отключает входы операционного блока 6(19) от выходов блока 2(15) формирователей и подключает выход блока 4(17) управляемой эталонной частоты на вход операционного блока 6(19). При этом максимальные эталонные частоты из выхода блока 4(17) поступают в вход операционного блока 6(19). Количество частотных входов операционного блока 6(19) отвечает количеству контролируемых частотных параметров газотурбинного двигателя. Операционный блок 6(19) последовательно или параллельно, при наличии в его процессоре многоканальных преобразователей частота (интервал) - код, обеспечивает преобразование максимальных эталонных частот, поступающих из выхода блока 4(17) через блок 3(16) коммутации частоты, в контрольный двоичный код. После каждого подключения контрольной частоты, при последовательном преобразовании, а соответственно и после каждого ее преобразования операционный блок 6(19) записывает в свою память значения контрольного кода. После преобразования операционным блоком 6(19) эталонных частот и записи контрольных кодов в свою память обеспечивается запись блоком 6(19) в свою память сигналов имитации нарушения входных цепей частотных датчиков, в виде логической 1, из выхода блока 5(18) контроля датчиков. Затем операционный блок 6(19) начинает анализировать записанную в память максимальную контрольную информацию, которая превышает предельные значения параметров газотурбинного двигателя, по алгоритмам допускового контроля и по результату анализа формирует на своем информационном выходе 6-3(19-3) последовательный двоичный код,который должен быть в виде логической 1 и что под действием тактовой частоты, поступающей на последовательно-параллельный регистр 34(39) блока 12(24) формирования команд из выхода 6-4(19-4) операционного блока 6(19) через коммутатор 37(42) блока 12(24),записывается в последовательно-параллельный регистр 34(39) блока 12(24) формирования команд, где последовательный двоичный код преобразуется в параллельный. Затем из выхода 6-5(19-5) блока 6(19) выдается сигнал, который не проходит на регистр 35(40) через элемент 38(43) И блока 12(24) формирования команд в связи с наличием на его втором входе запрещающего сигнала из выхода 13-1(25-1), что предотвращает перезапись параллельного двоичного кода из регистра 34(39) на регистр 35(40) блока 12(24), в связи с чем исходное положение регистра 35(40) и выходного каскада 36(41) блока 12(24) не изменяется, т.е. выходные команды не выдаются. После завершения подачи тактовой частоты из выхода 6-4(19-4) блока 6(19) из его выхода 6-6(19-6) на вход блока 13(25) контроля поступает сигнал продолжительностью, достаточной для обеспечения появления на выходе 13-4(25-4) блока 13(25) сигнала в виде логического 0, что в свою очередь обеспечивает прохождение через коммутатор 37(42) блока 12(24) формирования команд тактовой частоты из выхода 13-5(25-5) блока 13(25) на 9 8532 1 2006.10.30 вход последовательно-параллельного регистра 34(39) блока 12(24). Под действием входной тактовой частоты последовательный двоичный код из регистра 34(39) блока 12(24) формирования команд переписывается в блок 13(25) контроля. После завершения выдачи тактовой частоты из выхода 13-5(25-5) на выходе 13-4(25-4) блока 13(25) контроля появится сигнал в виде логической 1, который поступает на вход коммутатора 37(42) блока 12(24) формирования команд, который обеспечивает прохождение через него тактовой частоты из выхода 6-4(19-4) блока 6(19). Переписанный двоичный код из регистра 34(39) блока 12(24) формирования команд анализируется блоком 13(25) контроля, и если он отвечает максимальным значениям, то есть каждый разряд двоичного кода имеет значение в виде логической 1, то на выходе 13-6(25-6) блока 13(25) контроля сигнал неисправности в виде логического 0 отсутствует. Если он не отвечает максимальным значениям, то есть он в виде логического 0, один или несколько разрядов в виде логического 0, то на выходе 13-6(25-6) блока 13(25) контроля появится сигнал неисправности в виде логического 0, который поступает на выходной каскад 36(41) блока 12(24) формирования команд и предотвращает выдачу команд на блок 28 выдачи команд управления и далее на его выход к исполнительным элементам газотурбинного двигателя. Кроме того, сигнал неисправности из выхода 13-6(25-6) блока 13(25) контроля поступает на операционный блок 26 и далее регистрируется в блоке 27 накопителя и передается на пульт 31 оперативного управления и контроля. Наличие сигнала неисправности - нуждается в ремонте система. После завершения анализа максимального контрольного кода из выхода 13-2(25-2) блока 13(25) контроля выдается сигнал логического 0 на блок 4(17) управляемой эталонной частоты и блок 11(23) управляемых эталонов, который обеспечивает на выходе блока 4(17) минимальные эталонные частоты, а на выходе блока 11(23) - минимальные эталонные напряжения, которые не превышают предельные значения параметров газотурбинного двигателя. На выходе 13-3(25-3) блока 13(25) контроля сигнал не изменяется и остается в виде логической 1 и соответственно не изменяет режим работы блока 5(18) контроля датчиков, т.е. на его выходе получаем сигналы в виде логической 1, которые поступают на входы коммутатора 7(20), блока 3(16) коммутации частоты и операционного блока 6(19). Из выхода 13-4(25-4) блока 13(25) контроля поступает сигнал, например, в виде логической 1 на вход коммутатора 37(42) блока 12(24) формирования команд, которая обеспечивает прохождение через него тактовой частоты из выхода 6-4(19-4) операционного блока 6(19). Далее работу системы в режиме самоконтроля при минимальных эталонных напряжениях на выходе блока 11(23) эталонов и минимальных эталонных частотах на выходе блока 4(17) рассмотрим в следующей последовательности по каналу операционного блока 6(19). Присутствие сигналов в виде логической 1 из выхода блока 5(18) контроля датчиков на входе коммутатора 7(20) обеспечивает прохождение минимальных эталонных напряжений через коммутатор 7(20) к коммутатору 8(21) и в результате на его входе устанавливаются минимальные контрольные значения постоянного напряжения. Из выхода 6-2(19-2) блока 6(19) на вход коммутатора 8(21) поступают сигналы, например, в виде двоичного кода параллельного или последовательного, которые обеспечивают поочередное подключение минимальных эталонных значений напряжения из выхода коммутатора 7(20) через коммутатор 8(21) к аналого-цифровому преобразователю 9(22), в котором минимальное контрольное напряжение преобразовывается в минимальный двоичный контрольный код. После каждого подключения минимального контрольного напряжения, а соответственно и после каждого его преобразования преобразователем 9(22) с интервалом времени, превышающим переходные процессы в коммутаторе 8(21) и аналого-цифровом преобразователе 9(22), операционный блок 6(19) записывает в свою память минимальные значения Контрольного кода. После преобразования минимальных контрольных напряжений из выхода 10 8532 1 2006.10.30 коммутатора 7(20) и записи минимальных контрольных кодов в память операционного блока 6(19) снимается сигнал из выхода 6-2(19-2) блока 6(19) и обеспечивается запись блоком 6(19) в своей памяти сигналов имитации нарушения входных цепей аналоговых датчиков, в виде логической 1, из выхода блока 5(18) контроля датчиков. Из выхода блока 5(18), как было указанно выше, на вход блока 3(16) коммутации частоты поступает сигнал логической 1, что обеспечивает прохождение минимальной эталонной частоты блока 4(17) на вход операционного блока 6(19). При этом минимальные эталонные частоты из выхода блока 4(17) поступают в вход операционного блока 6(19). Операционный блок 6(19) обеспечивает преобразование минимальных эталонных частот,поступающих из выхода блока 4(17) через блок 3(16), в контрольный двоичный код. После каждого подключения минимальной контрольной частоты, при последовательном преобразовании, а соответственно и после каждого ее преобразования операционный блок 6(19) записывает в свою память значения минимального частотного контрольного кода. После преобразования операционным блоком 6(19) минимальных эталонных частот и записи контрольных кодов в свою память обеспечивается запись блоком 6(19) в свою память сигналов имитации нарушения входных цепей частотных датчиков, в виде логической 1, из выхода блока 5(18) контроля датчиков. Затем операционный блок 6(19) начинает анализировать ранее записанную в память минимальную контрольную информацию по алгоритмам допускового контроля и по результату анализа формирует на своем информационном выходе 6-3(19-3) последовательный двоичный код, который должен быть в виде логического 0 и который под действием тактовой частоты, поступающей до регистра 34(39), блока 12(24) формирования команд из выхода 6-4(19-4) операционного блока 6(19) через коммутатор 37(42) блока 12(24) формирования команд, записывается в последовательно-параллельный регистр 34(39) блока 12(24),где последовательный двоичный код преобразовывается в параллельный. Потом из выхода 6-5(19-5) блока 6(19) выдается сигнал, который не проходит на регистр 35(40) через элемент 38(43) И блока 12(24) в связи с наличием на его втором входе запрещающего сигнала из выхода 13-1(25-1) блока 13(25) контроля, который предотвращает перезапись параллельного двоичного кода из регистра 34(39) в регистр 35(40) блока 12(24), в связи с чем исходное положение регистра 35(40) и выходного каскада 36(41) блока 12(24) не изменяется, то есть выходные команды не выдаются. После завершения подачи тактовой частоты из выхода 6-4(19-4) операционного блока 6(19) из его выхода 6-6(19-6) на вход блока 13(25) контроля поступает сигнал продолжительностью, достаточной для обеспечения появления на выходе 13-4(25-4) блока 13(25) сигнала в виде логического 0, что в свою очередь обеспечивает прохождение через коммутатор 37(42) блока 12(24) формирования команд тактовой частоты из выхода 13-5(25-5) блока 13(25) на вход последовательно-параллельного регистра 34(39) блока 12(24). Под действием входной тактовой частоты последовательный двоичный код из регистра 34(39) блока 12(24) переписывается в блок 13(25) контроля. После завершения выдачи тактовой частоты из выхода 13-5(25-5) на выходе 13-4(25-4) блока 13(25) контроля появляется сигнал в виде логической 1, который поступает на вход коммутатора 37(42) блока 12(24) формирования команд и обеспечивает прохождение через него тактовой частоты из выхода 6-4(19-4) блока 6(19). Переписанный двоичный код из регистра 34(39) блока 12(24) анализируется блоком 13(25) контроля, и если он отвечает минимальным значениям, то есть каждый разряд двоичного кода имеет значение в виде логического 0, то на выходе 13-6(25-6) блока 13(25) контроля сигнал неисправности в виде логического 0 не появится. Если он не отвечает минимальным значениям, то есть он в виде логической 1 или один или несколько разрядов в виде логической 1, то на выходе 13-6(25-6) блока 13(25) контроля появится сигнал неисправности в виде логического 0, который поступает на выходной каскад 36(41) блока 12(24) формирования команд и предотвращает выдачу ко 11 8532 1 2006.10.30 манд на блок 28 и далее на выход к исполнительным элементам газотурбинного двигателя. Кроме того, сигнал неисправности из выхода 13-6(25-6) блока 13(25) контроля поступает на операционный блок 26 и далее регистрируется в блоке 27 накопителя и передается на пульт 31 оперативного управления и контроля. Наличие сигнала неисправности требует ремонта системы. После завершения цикла самоконтроля на выходе 13-3(25-3) блока 13(25) контроля устанавливается сигнал в виде логического 0, который обеспечивает возвращение блока 5(18) к контролю входных цепей аналоговых и частотных датчиков. После снятия сигнала из выхода 13-3(25-3) блока 13(25) снимается сигнал из выхода 13-1(25-1) блока 13(25) и операционный блок 6(19) переходит в режим измерения сигналов из датчиков, характеризующих физическое состояние параметров газотурбинного двигателя. После проведения цикла самоконтроля из зарегистрированных в памяти операционного блока 6(19) результатов преобразования контрольных аналоговых и частотных сигналов максимальных и минимальных, а также сигналов имитации нарушения входных цепей операционный блок 6(19) формирует кадр, имеющий признак проведенного самоконтроля и информацию, характеризующую техническое состояние измерительных аналоговых и частотных каналов операционного блока 6(19), и выдает, например, в виде последовательного двоичного адресного кода из выхода 6-7(19-7) блока 6(19) на вход операционного блока 26. Полученный из выхода 6-7(19-7) блока 6(19) последовательный двоичный код операционный блок 26 преобразовывает его в двоичное значение, удобное для записи в соответствующие адреса блока 27 накопителя. Кроме того, операционный блок 26, получая кадр, имеющий признак проведенного самоконтроля и информацию, характеризующую техническое состояние измерительных аналоговых и частотных каналов операционного блока 6(19) в реальном времени выдает,например, в виде разнополярного адресного кода, который принимается вычислителем 46 через блок 47 приема разнополярного кода пульта 31 оперативного управления и контроля. Пульт 31 оперативного управления и контроля принятую информацию документирует и отображает на блоке 45 отображения сообщений, например, в виде протокола, по которому видно, имеют место или нет нарушения в измерительных каналах операционного блока 6(19). Как видно из указанного выше, результаты проведенного самоконтроля измерительных каналов аналоговых и частотных операционного блока 6(19), регистрируются в блоке 27 накопителя, которые потом, при необходимости, могут также считываться через операционный блок 26 с помощью пульта 31 оперативного управления и контроля, который через свой блок 49 на вход операционного блока 26 по цепи связи выдает сигналы, например, в виде последовательного двоичного кода, под влиянием которого блок 26 переходит в режим считывания накопленной информации в блоке 27 и передачи ее к вычислителю 46 через блок 49 пульта 31. Пульт 31 оперативного управления и контроля принятую информацию документирует и отображает на блоке 45 отображения сообщений, например, в виде протокола, по которому видно, имеют место или нет нарушения в измерительных каналах операционного блока 6(19). Контроль функционирования системы может осуществляться также по запросам, например, как из пульта 31 оперативного управления и контроля или места бортинженера,так и автоматизированной системы контроля параметров самолета за описанным выше алгоритмом. После завершения цикла самоконтроля операционные блоки 6 и 19 переходят к режиму измерения сигналов из датчиков, характеризующих физическое состояние параметров газотурбинного двигателя. При отсутствии нарушений цепей аналоговых датчиков операционных блоков 6 и 19 системы из выхода блока 5 на вход коммутатора 7 поступают сигналы в виде логического 12 8532 1 2006.10.30 уровня 0, которые подключают выходы блока 10 согласования к коммутатору 8, а при отсутствии нарушений цепей тех же аналоговых датчиков системы из выхода блока 18 на вход коммутатора 20 поступают сигналы в виде логического уровня 0, которые подключают выходы блока 10 согласования к коммутатору 21. При неработающем двигателе, например, перед его запуском на блоке 44 набора команд пульта 31 оператором набираются команды, которые через вычислитель 46 поступают на блок 48 формирования разнополярного кода, где команды блока 44 преобразуются в последовательный адресный разнополярний двоичный код и подаются на вход операционного блока 26. Под влиянием последовательного адресного разнополярного двоичного кода операционный блок 26 переходит в режим, который через блок 32 формирования команд перенастройки влияет на систему регулирования газотурбинного двигателя. При этом режиме из выхода блока 26 на вход блока 32 поступает, например, последовательный двоичный код, который в нем преобразовывается в параллельный двоичный код. В результате преобразования на выходе блока 32 появляются сигналы, например, в виде напряжения плюс 27 вольт, которые воздействуют на соответствующие элементы системы регулирования газотурбинного двигателя, вследствие чего она перенастраивается на один из режимов боевой или учебный. Выходные команды блока 32 в виде бортового напряжения плюс 27 вольт одновременно поступают в вход блока 33 контроля команд перенастройки. Блок 33 обеспечивает гальваническую развязку бортовой сети между блоками 32 и системой регулирования газотурбинного двигателя и напряжения питания блоков и элементов данной системы для обеспечения его помехоустойчивости, а также по сигналу из операционного блока 26 формирует на своем выходе, например, однополярный, последовательный двоичный код(характеризует состояние выходных управляющих сигналов перенастройки), который поступает в вход операционного блока 26 и регистрируется в его памяти, а потом переписывается в соответствующие адреса накопителя блока 27. Кроме того, операционный блок 26, получая от блока 33 однополярный, последовательный двоичный код, отображающий выдачу сигналов перенастройки, в реальном времени выдает, например, в виде разнополярного адресного кода, который принимается вычислителем 46 через блок 47 приема разнополярного кода пульта 31 оперативного управления и контроля. Пульт 31 оперативного управления и контроля принятую информацию о выдаче сигналов переналадки документирует и отображает на блоке 45 отображения сообщений. Как видно из вышеуказанного, сигналы перенастройки системы регулирования газотурбинного двигателя регистрируются в блоке 27 накопителя, которые потом, при необходимости, могут также считываться через операционный блок 26 с помощью пульта 31 оперативного управления и контроля, который через свой блок 49 на вход операционного блока 26 по цепи связи выдает сигналы, например, в виде последовательного двоичного кода, под влиянием которого блок 26 переходит в режим считывания накопленной информации в блоке 27 и передачи ее к вычислителю 46 через блок 49 пульта 31. Пульт 31 оперативного управления и контроля принятую информацию документирует и отображает на блоке 45 отображения сообщений, например, в виде протокола, по которому видно, имели место или нет сигналы перенастройки системы регулирования газотурбинного двигателя. После перенастройки системы регулирования газотурбинного двигателя на боевой или учебный режим оператор, набирая соответствующие команды на блоке 44, переводит пульт 31 оперативного управления и контроля в режим отображения информации о состоянии параметров газотурбинного двигателя и самой системы на блоке 45, поступающей от операционного блока 26, после чего запускается двигатель и сигналы от датчиков поступают на данную систему. 13 8532 1 2006.10.30 Рассмотрим работу системы в режиме проведения контроля сигналов, характеризующих физическое состояние параметров газотурбинного двигателя, на примере измерительного канала операционного блока 6 (в скобках будут указанны соответствующие блоки измерительного канала операционного блока 19). Сигналы от аналоговых датчиков контролируемых параметров газотурбинного двигателя (на чертеже не показаны) поступают в блок 10 согласования, где осуществляется согласование выходных характеристик датчиков и нормализация входных сигналов от датчиков и выдачи нормализованных сигналов в виде постоянного напряжения, удобного для преобразования как в цифровую форму, так и для функционирования блоков 5 и 18 контроля датчиков, через коммутаторы 7 и 20 на входы коммутаторов 8 и 21 соответственно. Количество каналов в блоке 10 отвечает количеству подключенных к его входу датчиков. Из выхода блока 10 согласования сигналы, величины которых пропорциональны сигналам из датчиков (нарушение входных цепей отсутствует), поступают в блок 5(18), из выхода которого ко входам блока 6(19) и коммутатора 7(20) поступают сигналы логического уровня 0, которые свидетельствуют об отсутствии нарушения входных цепей. Кроме того, сигналы из выхода блока 10 через коммутатор 20 поступают также в коммутатор 21. Величины напряжений на выходах блока 10 изменяются пропорционально изменению контролируемых параметров газотурбинного двигателя. Процесс измерения, обработки, формирования выходных управляющих команд, регистрация в накопителе выданных системой управляющих команд и информации о состоянии параметров газотурбинного двигателя, а также выдача команд системой при работающем газотурбинном двигателе осуществляется в следующем порядке. При работающем газотурбинном двигателе сигналы от аналоговых датчиков (вход 1) поступают в блок 10 согласования, где преобразовываются в заданный уровень постоянного напряжения, удобного как для аналого-цифрового преобразования, так и для использования блоком 5(18) контроля датчиков. Каналы контроля датчиков блока 5(18) настраиваются на уровень напряжения, меньше чем уровень напряжения, которое отвечает, например,нулевому уровню давления в магистралях воздушных, топливных и масляных двигателей. Каналы блока 5(18) контроля датчиков подключаются к цепям датчиков через блок 10 согласования. При нарушении входных цепей аналоговых датчиков или отказе соответствующего канала блока 10 из выхода блока 5(18) выдаются сигналы на коммутатор 7(20) для подключения соответствующего эталона блока 11(23) к коммутатору 8(21) и дальше к аналого-цифровому преобразователю 9(22) и к операционному блоку 6(19) для обеспечения регистрации нарушения входной цепи датчика. От частотных датчиков (вход 2(3 переменный сигнал, пропорциональный частоте вращения ротор-двигателя, например, высокого и низкого давления, поступает в блок 2(15) формирователей, который формирует, например, однополярные прямоугольные импульсы, которые поступают в блок 3(16) коммутации частоты. Цепи частотных датчиков подключены к блоку 5(18) контроля датчиков. Каналы контроля частотных датчиков блока 5(18) при нарушении входных цепей выдают сигналы на операционный блок 6(19) для обеспечения их регистрации и блок 3(16) коммутации частоты для подключения соответствующей эталонной частоты блока 4(17) к операционному блоку 6(19). Дальнейший процесс измерения, обработки, формирования выходных управляющих команд, регистрация в накопителе выданных системой управляющих команд и информации о состоянии параметров газотурбинного двигателя, представление оперативной информации, а также выдача команд системой при работающем газотурбинном двигателе осуществляется в следующем порядке. Из выхода 6-2(19-2) блока 6(19) на вход коммутатора 8(21) поступают сигналы, которые обеспечивают поочередное подключение нормализованных напряжений из выхода коммутатора 7(20) через коммутатор 8(21) к аналого-цифровому преобразователю 9(22), в котором постоянное напряжение преобразуется в двоичный код, величина которого про 14 8532 1 2006.10.30 порциональна значению контролируемого параметра. После каждого подключения нормализованного напряжения, а соответственно и после каждого его преобразования преобразователем 9(22) с интервалом времени, превышающим переходные процессы в коммутаторе 8(21) и аналого-цифровом преобразователе 9(22), операционный блок 6(19) записывает в свою память значения двоичного кода, характеризующего физическое состояние параметров газотурбинного двигателя. После завершения преобразования сигналов из блока 10 согласования и записи результатов преобразования в память блока 6(19) прекращается подача кодовых комбинаций по цепи 6-2(19-2) из блока 6(19) к коммутатору 8(21) и обеспечивается запись сигналов (при нарушении цепей датчиков сигнал будет в виде логической 1) из выхода блока 5(18) контроля датчиков в память блока 6(19). После завершения функционирования измерительного канала аналоговых параметров операционного блока 6(19), по контролю параметров газотурбинного двигателя, функционирует измерительный канал (вход 2 (вход 3 частотных датчиков, соединенный с операционным блоком 6(19), в следующем порядке. Сигналы от частотных датчиков (вход 2 (вход 3 контролируемых параметров (на чертеже не показаны) в виде переменного напряжения, периоды следования которых пропорциональны числам оборотов газотурбинного двигателя, поступают через блок 1(14) конденсаторов на блок 2(15) формирователей, где и преобразуются в импульсы прямоугольной формы. Из блока 2(15) формирователей прямоугольные импульсы поступают через блок 3(16) коммутации частоты на вход операционного блока 6(19). При отсутствии отказов в цепях частотных датчиков на входе операционного блока 6(19) присутствуют последовательности прямоугольных импульсов, периоды которых пропорциональны числу оборотов вращающихся частей газотурбинного двигателя. Вследствие функционирования операционного блока 6(19) за описанным выше алгоритмом преобразуются аналоговые сигналы, которые поступают из выхода блока 10 согласования через коммутаторы 7(20) и 8(21), а также через преобразователь 9(22) на вход блока 6(19), в двоичный код, импульсные последовательности, которые поступают из выхода блока 3(16), в двоичный код, а также сигналы, которые свидетельствуют о нарушении в цепях аналоговых и частотных датчиков из выхода блока 5(18) контроля датчиков,которые фиксируются в памяти операционного блока 6(19). После проведения цикла регистрации в памяти операционного блока 6(19) результатов преобразования входных аналоговых и частотных сигналов, а также состояние входных цепей операционный блок 6(19) начинает анализировать ранее записанную в памяти информацию, характеризующую состояние параметров газотурбинного двигателя по алгоритмам допускового контроля. Если один или несколько параметров газотурбинного двигателя первый раз достигли своего максимального значения, из выхода 6-1(19-1) операционного блока 6(19) поступает сигнал на вход блока 13(25), под действием которого он начинает функционировать по описанному выше алгоритму самоконтроля. После окончания самоконтроля на выходах 13-1(25-1), 13-4(25-4) блока 13(25) устанавливаются сигналы в виде логического уровня 1, которые поступают в блок 12(24) формирования команд и через соответствующие его элементы 37(42), 38(43) обеспечивают прохождение сигналов из выходов 6-4(19-4), 65(19-5) операционного блока 6(19). Кроме того, при отсутствии неисправностей в измерительных каналах операционного блока 6(19) на выходе 13-6(25-6) устанавливается сигнал логического уровня 1, который обеспечивает прохождение сигналов из выхода блока 35(40) к выходному каскаду 36(41) блока 12(24). После завершения цикла самоконтроля по результату измерения сигналов, характеризующих физическое состояние параметров газотурбинного двигателя, операционные блоки 6 и 19 снова переходят в режим измерения сигналов из датчиков. После проведения цикла регистрации в памяти операционного блока 6(19) результатов преобразования входных аналоговых и частотных сигналов, а также состояние входных цепей операционный блок 6(19) начинает анализировать раньше записанную к памяти 15 8532 1 2006.10.30 информацию, характеризующую состояние параметров газотурбинного двигателя по алгоритмам допускового контроля. Если однин или несколько тех же параметров газотурбинного двигателя второй раз достигли своего максимального значения, операционный блок 6(19) формирует на своем информационном выходе 6-3(19-3) последовательный двоичный код, в котором в соответствующих разрядах устанавливаются логические 1. Последовательный двоичный код из выхода 6-3(19-3) операционного блока 6(19) под действием тактовой частоты, поступающей в регистр 34(39) блока 12(24) из выхода 6-4(19-4) блока 6(19) через коммутатор 37(42) блока 12(24), записывается в последовательно-параллельный регистр 34(39) блока 12(24) формирования команд, где последовательный двоичный код преобразовывается в параллельный. Затем из выхода 6-5(19-5) блока 6(19) выдается сигнал, который поступает на регистр 35(40) через элемент 38(43) И блока 12(24) в связи с наличием на его втором входе сигнала из выхода 13-1(25-1) блока 13(25) контроля, который разрешает перезапись параллельного двоичного кода из регистра 34(39) в регистр 35(40) блока 12(24) формирования команд. Сигналы из выхода параллельного регистра 35(40) через выходной каскад 36(41) блока 12(24) формирования команд поступают на вход блока 28 выдачи команд управления, в котором включаются соответствующие электронные ключи или электромеханические реле тех параметров, которые достигли своего предельного значения и которые в свою очередь включают соответствующие агрегаты газотурбинного двигателя, например системы запуска, как на земле, так и в воздухе, системы энергообеспечения и т.д., и цикл измерения параметров и выдача управляющих команд, при превышении параметрами своего предельного значения, повторяется. Кроме того, сигнал, который свидетельствует, что газотурбинный двигатель работает,из выхода каскада 36(41) блока 12(24) поступает на блок 29 управления выдачей команд и блокирует его работу. Таким образом, на исполнительные элементы и системы газотурбинного двигателя команды (сигналы) о достижении предельных (граничных) уровней ограничения параметров попадают только после автоматического прохождения самоконтроля, отсутствия отказов в измерительных каналах и цепях датчиков и только при последующем подтверждении достижения параметром своего предельного значения. После завершения формирования управляющих команд для включения агрегатов газотурбинного двигателя из зарегистрированных в памяти операционного блока 6(19) результатов преобразования входных аналоговых и частотных сигналов, а также состояние входных цепей операционный блок 6(19) формирует кадр, имеющий информацию, характеризующую физическое состояние параметров газотурбинного двигателя, цепей его датчиков и техническое состояние самой системы, и выдает, например, в виде последовательного двоичного адресного кода из выхода 6-7(19-7) блока 6(19) на вход операционного блока 26. Полученный из выхода 6-7 или 19-7 блока 6 или 19 соответственно последовательный двоичный код (в зависимости от организации приема информации, с одного канала или с двоих одновременно, а также в зависимости от наличия отказов в каналах) операционный блок 26 преобразовывает его в двоичное значение, удобное для записи в соответствующие адреса накопителя блока 27. Кроме того, операционный блок 26 получая кадр, имеющий информацию, характеризующую физическое состояние параметров газотурбинного двигателя, цепей его датчиков и техническое состояние самой системы, в реальном времени выдает, например, в виде разнополярного адресного кода, который принимается вычислителем 46 через блок 47 приема разнополярного кода пульта 31 оперативного управления и контроля. Пульт 31 оперативного управления и контроля принятую информацию документирует и отображает на блоке 45 отображения сообщений, например, в виде графиков и физических значений параметров газотурбинного двигателя. 16 8532 1 2006.10.30 Как видно из указанного выше, результаты проведенного контроля параметров газотурбинного двигателя по каналам операционного блока 6(19) регистрируются в блоке 27 накопителя, которые потом, при необходимости, могут также считываться через операционный блок 26 с помощью пульта 31 оперативного управления и контроля, который через свой блок 49 на вход операционного блока 26 по цепи связи выдает сигналы в виде последовательного двоичного кода, под влиянием которого блок 26 переходит к режиму считывания накопленной информации в блоке 27 и передачи ее к вычислителю 46 через блок 49 пульта 31. Пульт 31 оперативного управления и контроля принятую информацию документирует и отображает на блоке 45 отображения сообщений, например, в виде графиков и физических значений параметров газотурбинного двигателя. Этим и завершается цикл записи параметров газотурбинного двигателя, состояние цепей датчиков и техническое состояние измерительных каналов системы, в накопитель блока 27 и их просмотра оператором на блоке 45 пульта 31 оперативного управления и контроля, после чего цикл работы системы повторяется. Наличие идентичной информации из выходов 6-7 блока 6 и 19-7 блока 19 на входе операционного блока 26 позволяет обеспечить высокую надежность накопления информации в блоке 27 о физическом состоянии параметров газотурбинного двигателя и ее просмотр на блоке 45 пульта 31. Регистрация выходных команд управления системы выполняется в следующем порядке. При работающем двигателе выходные команды, например, в виде бортового напряжения, величина которого может быть, например, плюс 27 вольт, из блока 28 поступают на исполнительные элементы и одновременно поступают в вход блока 30 контроля команд управления. Блок 30 обеспечивает гальваническую развязку бортовой сети самолета и напряжения питания блоков и элементов данной системы для обеспечения его помехоустойчивости, а также по сигналу из операционного блока 26 формирует на своем выходе,например, однополярный последовательный двоичный код (характеризует состояние выходных управляющих команд системы), который поступает на вход операционного блока 26 и регистрируется в его памяти, а потом переписывается в соответствующие адреса накопителя блока 27 и передается на пульт 31 для просмотра в реальном времени. Этим и завершается цикл записи параметров газотурбинного двигателя, состояние цепей датчиков, состояние выходных управляющих команд системы и техническое состояние самой системы, в накопитель блока 27 и просмотра на блоке 45 пульта 31, после чего цикл работы системы повторяется. После завершения испытаний газотурбинного двигателя информация, которая была зарегистрирована в памяти вычислителя 46 пульта 31, по командам блока 44 отображается на блоке 45 пульта 31, и если она отвечает техническим требованиям, то документируется в соответствующей форме, а если необходимо сравнение параметров двигателя данных испытаний с предшествующими испытаниями, тогда оператором проводится считывание информации предшествующих испытаний, накопленных в блоке 27 через операционный блок 26 с помощью пульта 31 оперативного управления и контроля. Пульт 31 оперативного управления и контроля принятую информацию документирует и отображает на блоке 45 отображения сообщений, например, в виде графиков и физических значений параметров газотурбинного двигателя, и проводится сравнение с информацией последних испытаний. Полученная на испытаниях информация проверяется на соответствие двигателя техническим требованиям, анализируется состояние выходных команд системы, состояние параметров газотурбинного двигателя и цепей его датчиков и по результату анализа определяется или необходимость проведения разнообразных профилактических (ремонтных) мероприятий, или последующая передача газотурбинного двигателя в эксплуатацию. 17 8532 1 2006.10.30 При неработающем двигателе, например, на этапе производства и испытаний газотурбинного двигателя или после его капитального ремонта, а также при проведении регламентных работ, поиска отказов в цепях исполнительных элементов или проверке функционирования самых исполнительных элементов (агрегатов) газотурбинного двигателя используется пульт 31 оперативного управления и контроля, который на вход операционного блока 26 по линии связи выдает последовательность разнополярного двоичного кода,под влиянием которого блок 26 переходит в режим контроля состояния выходных цепей системы и выдачи кодовых посылок на блок 29 управления выдачей команд. При неработающем газотурбинном двигателе команды в виде напряжения плюс 27 вольт на выходе блока 28 должны отсутствовать. Выдача команд блоком 28 свидетельствует о его неисправности. Для определения исправности системы по выдаче команд блок 31 выдает кодовые посылки и блок 26 переходит в режим контроля наличия выходных команд блока 28. Далее система работает за описанным выше алгоритмом контроля команд управления при работающем двигателе. После завершения цикла контроля выходных команд блок 26, например, выдает команду через блок 47 в вычислитель 46 блока 31, который в свою очередь выдает через блок 48 кодовую посылку в блок 26 для считывания зафиксированной информации и дальнейшего определения наличия выдачи ложных команд системой. В случае выдачи блоком 28 ложных команд система бракуется и вместо нее устанавливается исправная система. Для проверки выдачи команд блоком 28 системы, при неработающих двигателях, а также для проверки работоспособности исполнительных элементов газотурбинного двигателя и цепей связи с ними, например, перед испытаниями, при выполнении регламентных работ или проверке бортовых цепей и работоспособности агрегатов при выполнении регламентных работ в эксплуатации на самолете или после капитального ремонта двигателя оператором на блоке 44 набираются команды, которые через вычислитель 46 поступают на блок 48 и дальше подаются на вход операционного блока 26, который затем переходит в режим работы с блоком 29 управления выдачей команд. В этом режиме из выхода блока 26 на вход блока 29 поступает, например, последовательный двоичный код,который в нем преобразовывается в параллельный двоичный код. Вследствие преобразования на выходе блока 29 появляются сигналы, которые, влияя на соответствующие выходные элементы блока 28, например на реле, вследствие чего реле срабатывает, замыкает свои контакты и на выходе блока 28, а соответственно и на выходе системы появляется команда, например, в виде напряжения плюс 27 вольт. Наличие команды на выходе системы свидетельствует об исправности блока 28 системы, а отсутствие команд свидетельствует об отказе системы. Выходные команды блока 28 при исправности цепей связи включают соответствующие агрегаты самолета или двигателя. Срабатывание агрегата свидетельствует об исправности его самого и линии связи с ним. В случае несрабатывания агрегата выясняется причина отказа, которая состоит в проверке наличия выходной команды из блока 28 (проверяется за описанным выше алгоритмом контроля выдачи управляющих команд при работающем двигателе), линии связи и функционирования самого агрегата. Выявленные неисправности устраняются. Для определения наличия выходной команды, а соответственно и исправности системы подключенный к блоку 26 пульт 31 выдает кодовые посылки и блок 26 переходит в режим контроля наличия выходных команд из блока 28. Далее система работает за описанным выше алгоритмом контроля команд управления при работающем двигателе. Этим и заканчивается проверка системы, агрегатов двигателя и самолета и линий связи с ними. Для надежного предотвращения выдачи ложных команд управления блоком 29, при работающем двигателе, на его входы из выходов блоков 12 и 24 поступают сигналы, например, в виде логического 0, которые блокируют работу блока 29. Этим и предотвращается несанкционированное влияние блока 29 на работу блока 28 выдачи команд управления при работающем двигателе. 18 8532 1 2006.10.30 Предложенное техническое решение обеспечивает надежное испытание газотурбинного двигателя на разных режимах его работы и просмотр в реальном времени параметров газотурбинного двигателя. Предлагаемое изобретение позволяет повысить безопасность испытаний за счет исключения аварийных ситуаций на стенде или самолете с помощью проведения самоконтроля измерительных каналов системы перед выдачей команд на исполнительные агрегаты и просмотра в реальном времени параметров двигателя при его работе. Предложенное техническое решение за счет обеспечения надежного накопления информации за весь период испытаний, которая характеризует техническое состояние параметров газотурбинного двигателя, состояние цепей датчиков, состояние выходных команд системы, а также техническое состояние самой системы, позволяет обеспечить надежное испытание газотурбинного двигателя, сократить время на устранение отказов в оснащении двигателя, самолета и цепей датчиков и, как следствие, повысить надежность, снизить стоимость испытаний двигателя и сократить срок испытаний. Кроме того, проведение контроля выдачи команд из выхода системы и выдачи команд системой для проверки функционирования разных агрегатов и их линий связи при неработающем двигателе позволяет определить, какой конкретно исполнительный агрегат в отказе, или определить отказ в соответствующей цепи агрегата двигателя и, как следствие,сократить время поиска отказов агрегатов и их цепей. Предложенное техническое решение также позволяет обеспечить высокую функциональную надежность системы (обеспечивается независимым резервированием трактов измерения оборотов и оптимальным поблоковым резервированием измерительного тракта аналоговых датчиков с сохранением в каждом канале полной информации о состоянии газотурбинного двигателя), помехоустойчивость и достоверность контроля параметров(обеспечивается независимым автоматическим контролем функционирования, с выдачей контрольных кодов, при нарушениях входных цепей частотных и аналоговых датчиков). Как видно из вышеуказанного, предложенное техническое решение имеет высокую функциональную надежность, достоверность контроля параметров, помехоустойчивость и расширенные функциональные возможности, которые обеспечивают безопасность испытаний газотурбинного двигателя. Фиг. 2 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 19
МПК / Метки
МПК: F02C 9/28
Метки: система, газотурбинного, контроля, двигателя, испытаний
Код ссылки
<a href="https://by.patents.su/19-8532-sistema-kontrolya-dlya-ispytanijj-gazoturbinnogo-dvigatelya.html" rel="bookmark" title="База патентов Беларуси">Система контроля для испытаний газотурбинного двигателя</a>
Система контроля и регистрации параметров силовой установки летательного аппарата
Номер патента: 8530
Опубликовано: 30.10.2006
Авторы: Безсчастный Николай Алексеевич, Дробинов Вадим Павлович, Безсчастный Василий Алексеевич
МПК: F02C 9/28, G06F 15/16
Метки: параметров, силовой, контроля, система, аппарата, установки, летательного, регистрации
Текст:
...блока 4(15) и фиксируются в его памяти. Операционным блоком 4(15) из записанной в его памяти информации, которая характеризует состояние выходных команд блока 26, формируется кадр, который им же переписывается в соответствующие адреса блока 8(18) регистрации параметров. Этим и завершается цикл записи выходных команд блока 26,которые поступают в блок 5 контроля для предупреждения оператора о выходе любого параметра турбостартера за предельные...
Система контроля и регистрации параметров силовой установки летательного аппарата
Номер патента: 8526
Опубликовано: 30.10.2006
Автор: Безсчастный Василий Алексеевич
МПК: F02C 9/28, G06F 15/16
Метки: контроля, параметров, силовой, аппарата, система, установки, летательного, регистрации
Текст:
...сигнал, например, в виде логической 1 ко входу коммутатора 51(56) блока 47(49) автоматики блока 8(15) автоматического управления, который обеспечивает прохождение через него тактовой частоты из выхода 34-4(42-4) операционного блока 34(42) блока 6(13). Далее работу системы в режиме самоконтроля при минимальных эталонных напряжениях на выходе блока 38(46) эталонов и минимальных эталонных частотах на выходе блока 37(45) блока 6(13)...
Система электроснабжения
Номер патента: 2738
Опубликовано: 30.03.1999
Авторы: Прибыш Николай Николаевич, Акулов Валерий Юнсович, Ткачев Владимир Павлович
МПК: F02B 63/04
Метки: система, электроснабжения
Текст:
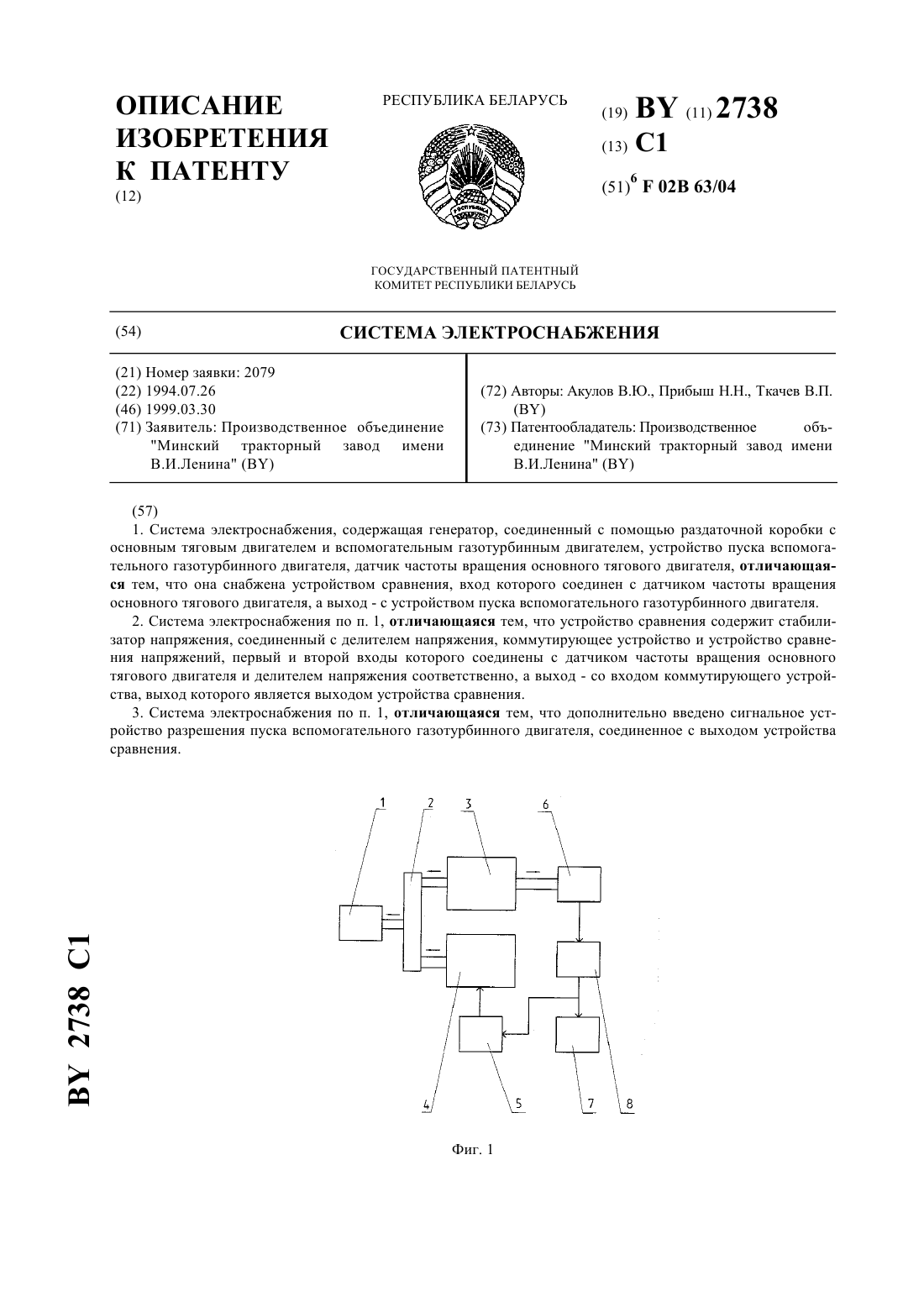
...сравнения. По сравнению с прототипом система электроснабжения отличается от прототипа тем, что она снабжена устройством сравнения, вход которого соединн с датчиком частоты вращения основного тягового двигателя, а выход - с устройством пуска вспомогательного газотурбинного двигателя, устройство сравнения выполнено в виде соединнных между собой стабилизатора напряжения, делителя напряжения,коммутирующего устройства и устройства сравнения...
Система предпусковой подготовки двигателя внутреннего сгорания
Номер патента: U 634
Опубликовано: 30.09.2002
Автор: Лопух Дмитрий Геннадьевич
МПК: F02F 1/20
Метки: система, предпусковой, сгорания, двигателя, подготовки, внутреннего
Текст:
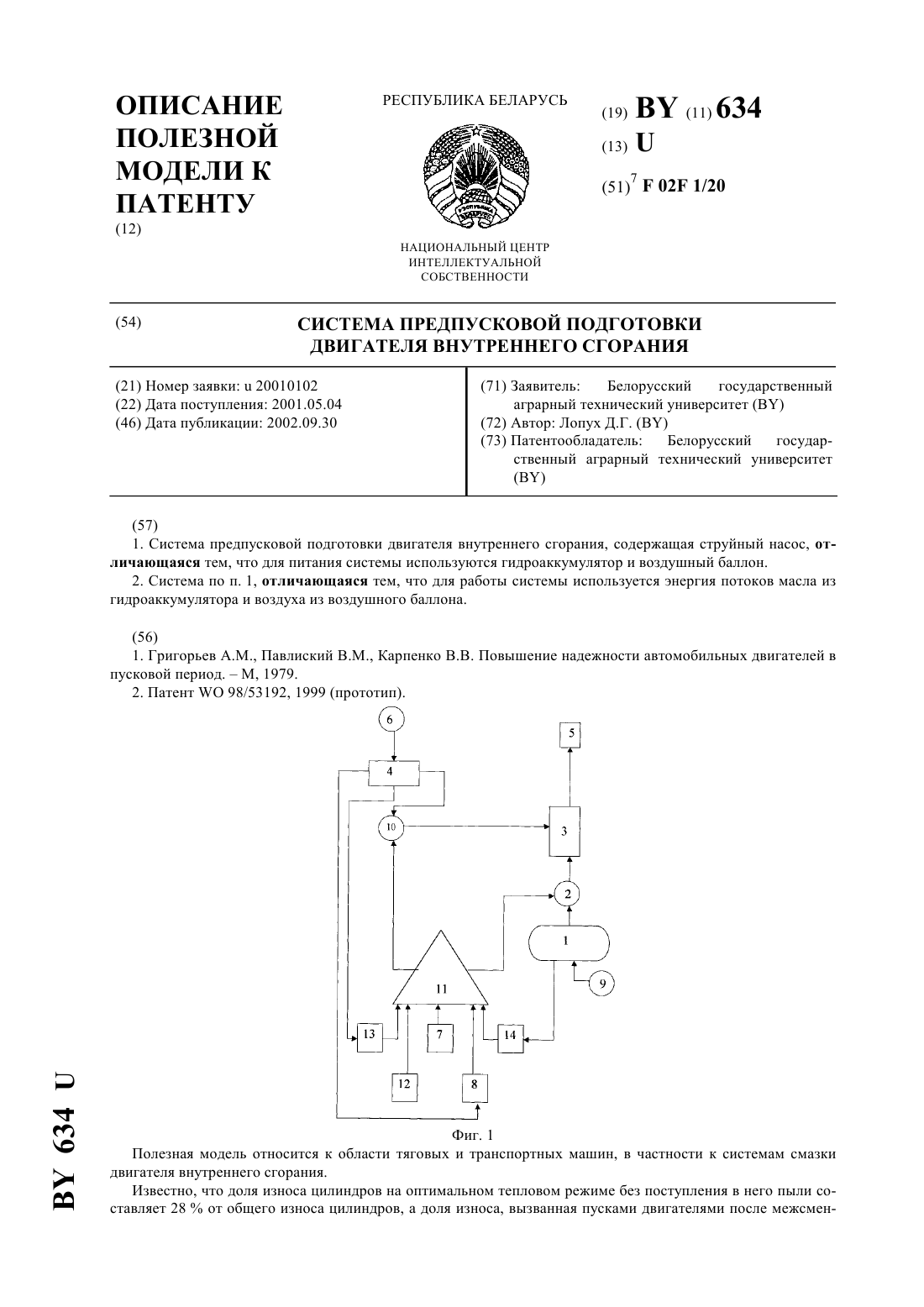
...через форсунки, располагающиеся под некоторым углом к оси коленчатого вала и находящиеся под гильзой цилиндра. На фиг. 1 изображена блок-схема системы предпусковой подготовки двигателя внутреннего сгорания. На фиг. 2 и 3 изображен алгоритм работы системы. Система предпусковой подготовки двигателя внутреннего сгорания состоит из воздушного баллона 1,клапана управления подачей воздуха к струйному насосу 2, струйного насоса 3,...
Система для регулирования подачи топлива двигателя внутреннего сгорания

Номер патента: 7023
Опубликовано: 30.06.2005
Авторы: Пашин Александр Дмитриевич, Могильницкий Иван Иосифович
МПК: F02D 41/00
Метки: система, внутреннего, топлива, регулирования, двигателя, подачи, сгорания
Текст:
...заключается в расширении функциональных возможностей и повышении точности регулирования.Поставленная задача решается тем, что система для регулирования подачи топлива двигателя внутреннего сгорания, содержащая блок управления, соединенный с расходомером воздуха, датчиком положения дроссельной заслонки, датчиком температуры всасываемого воздуха, датчиком распределителя зажигания, высотным корректором, датчиком температуры охлаждающей...
Предыдущий патент: Система контроля и регистрации параметров силовой установки летательного аппарата
Следующий патент: Газовая горелка
Случайный патент: Способ электролитно-плазменной обработки металлической поверхности перед нанесением покрытий