Способ адаптивной фильтрации и устройство для его осуществления
Номер патента: 9322
Опубликовано: 30.06.2007
Авторы: Лукашевич Максим Францевич, ГРИНЮК Дмитрий Анатольевич, Жарский Сергей Евгеньевич, Сарока Виктор Викторович, Медяк Диана Михайловна, ОРОБЕЙ Игорь Олегович, КУЗЬМИЦКИЙ Иосиф Фелицианович
Текст
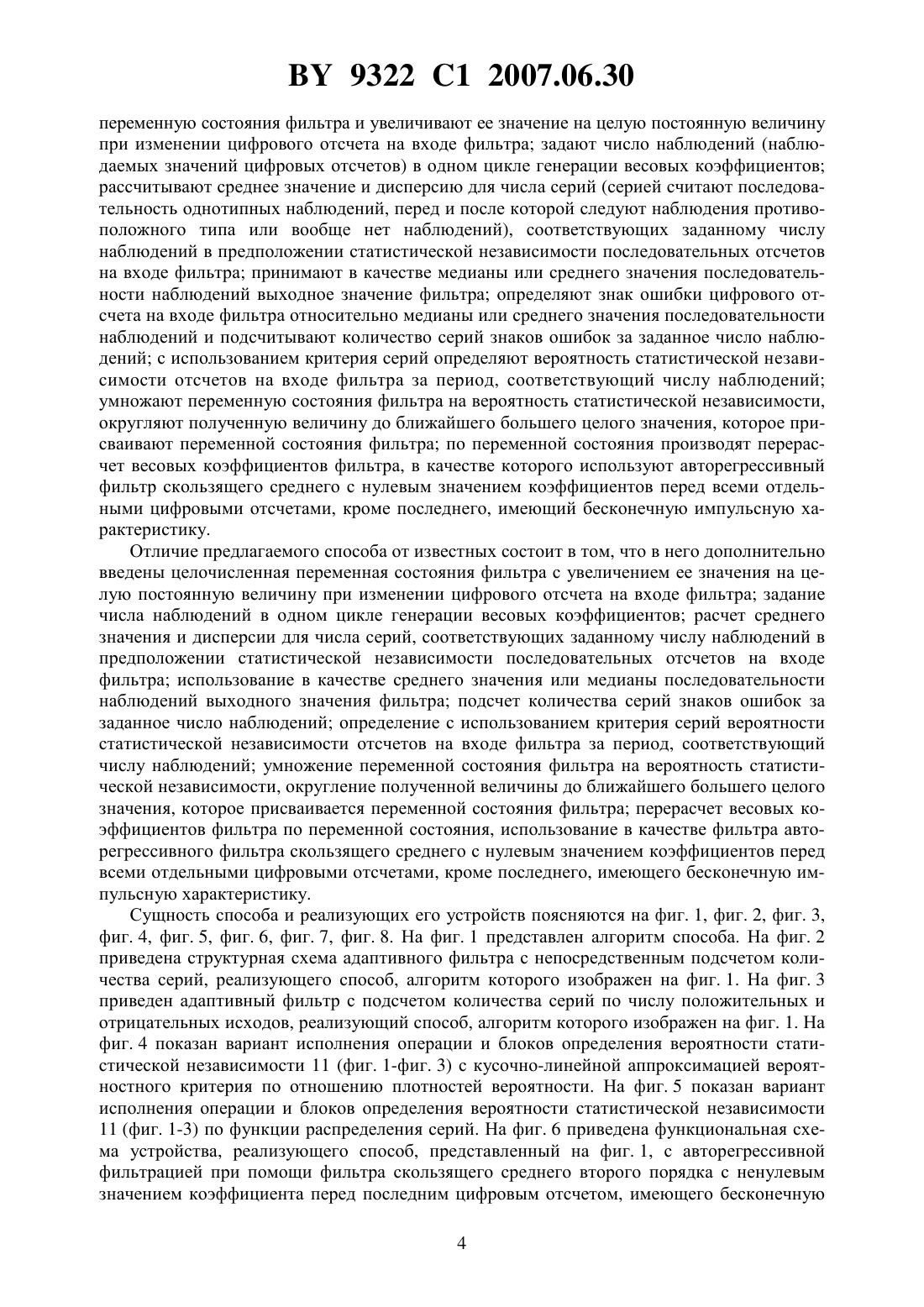
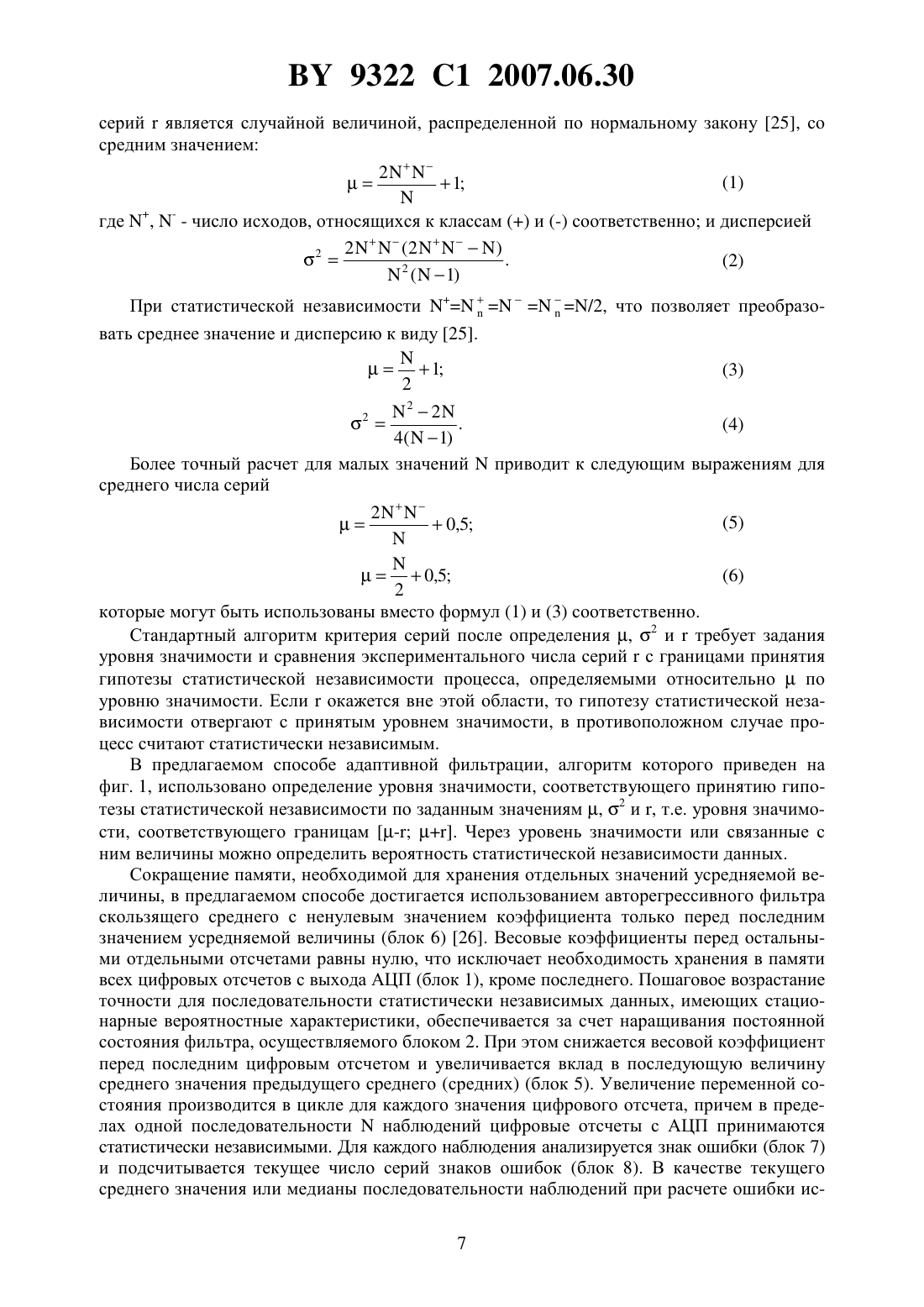
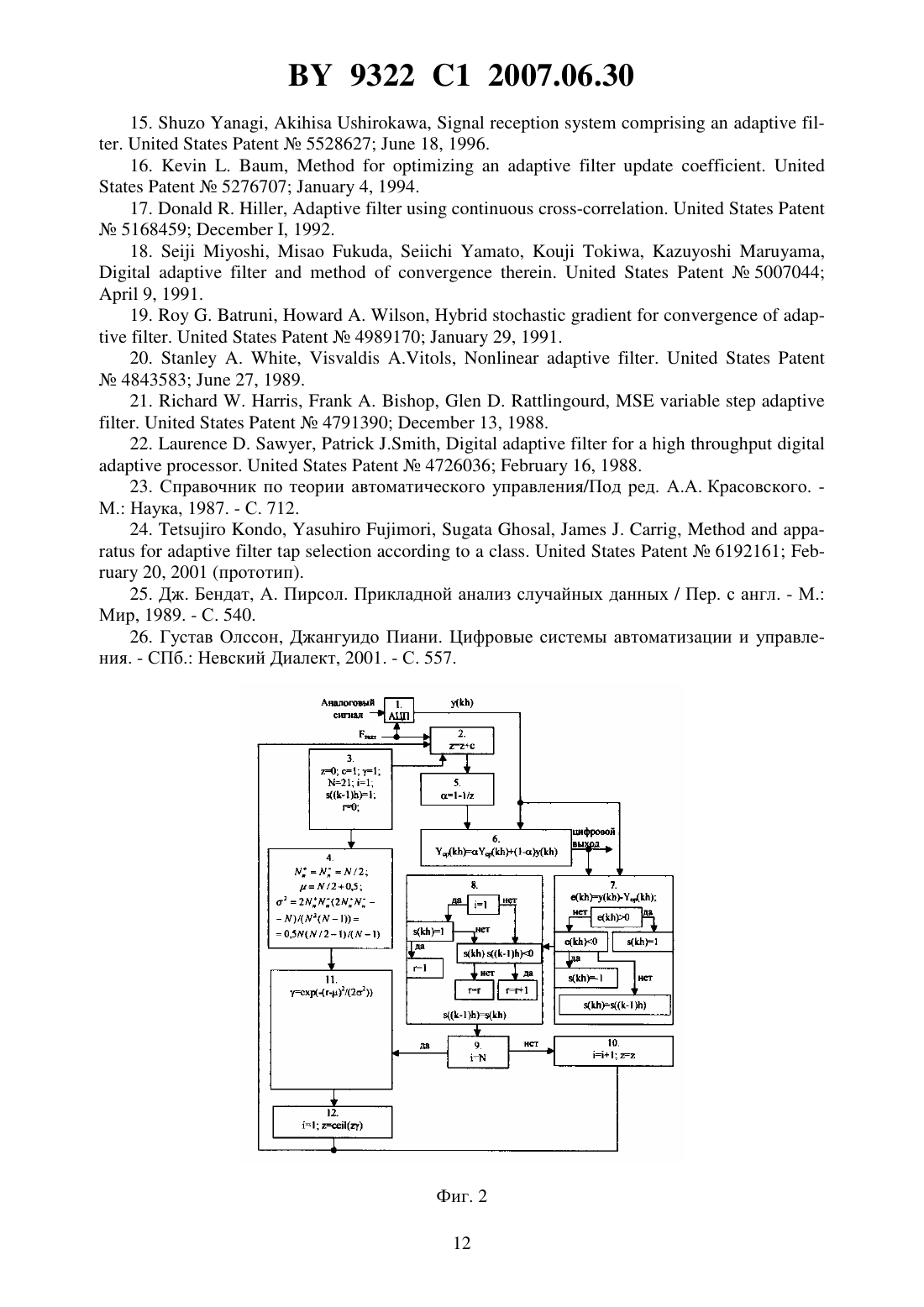
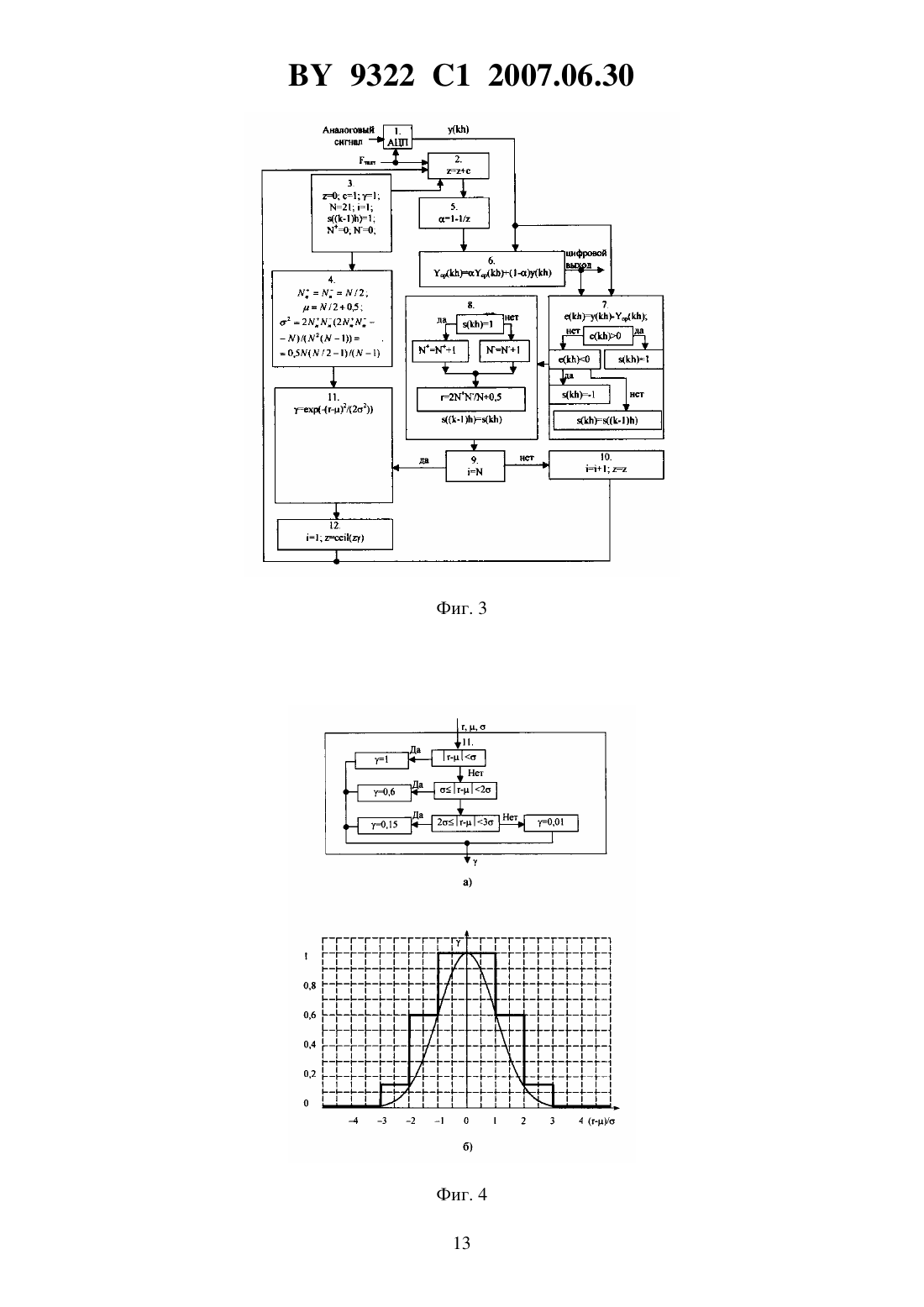
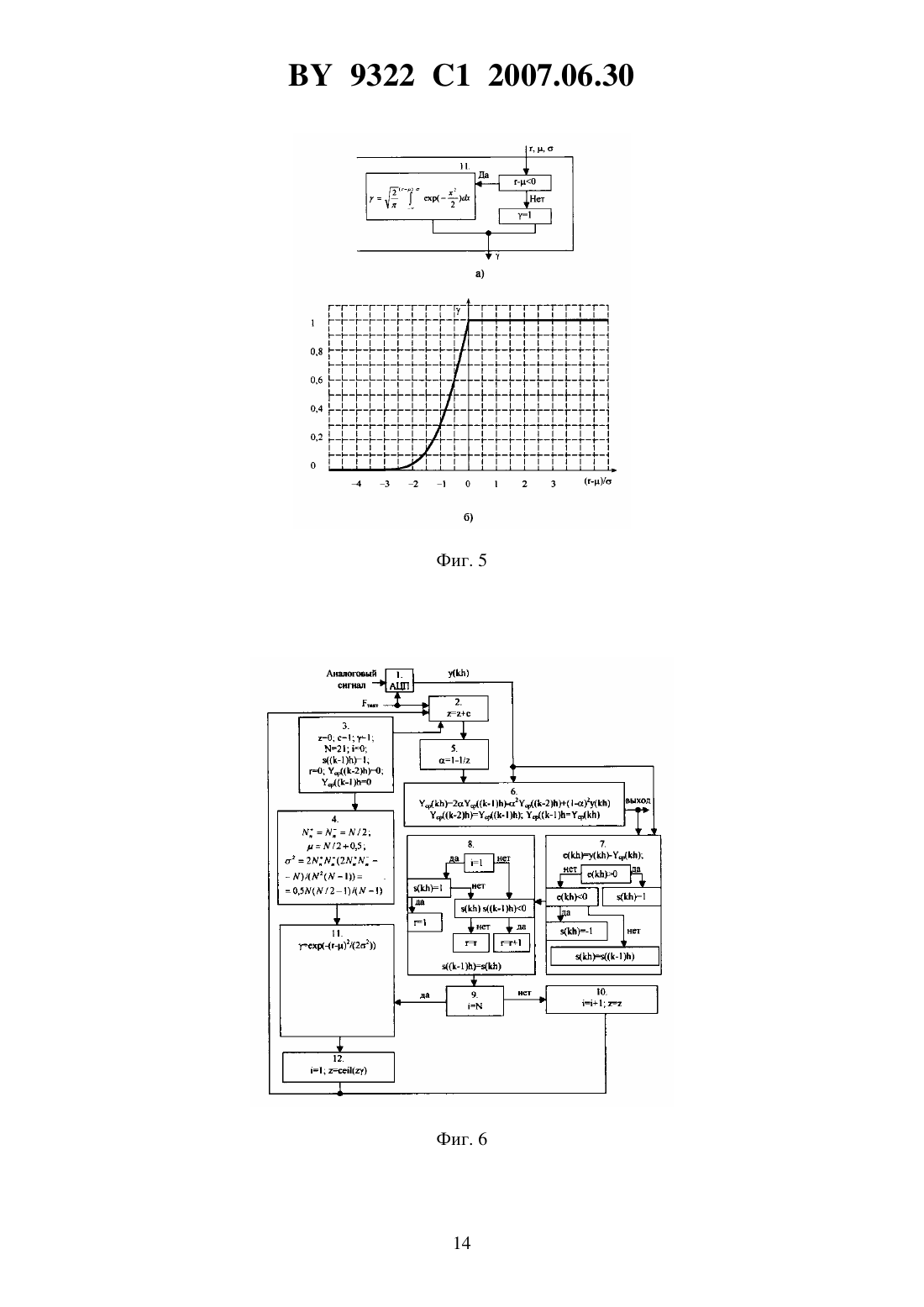
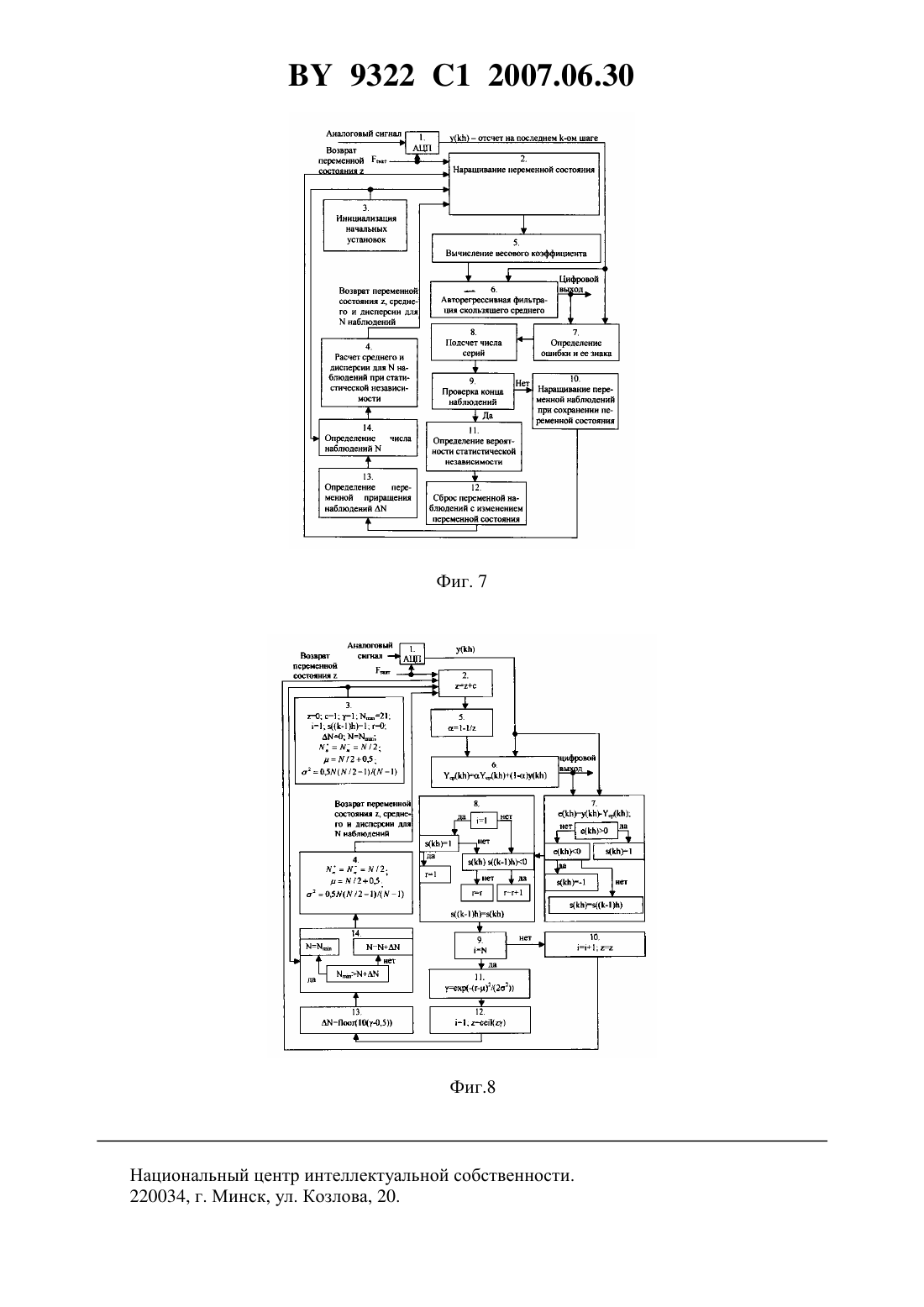
СПОСОБ АДАПТИВНОЙ ФИЛЬТРАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ(71) Заявитель Учреждение образования Белорусский государственный технологический университет(72) Авторы Оробей Игорь Олегович Кузьмицкий Иосиф Фелицианович Гринюк Дмитрий Анатольевич Жарский Сергей Евгеньевич Медяк Диана Михайловна Сарока Виктор Викторович Лукашевич Максим Францевич(73) Патентообладатель Учреждение образования Белорусский государственный технологический университет(57) 1. Способ адаптивной фильтрации сигнала, включающий аналого-цифровое преобразование сигнала и последующую фильтрацию полученной цифровой последовательности с помощью фильтров с изменяемыми весовыми коэффициентами отличающийся тем, что в качестве фильтра используют авторегрессионый фильтр скользящего среднего с нулевым 9322 1 2007.06.30 значением весовых коэффициентов перед всеми отдельными цифровыми отсчетами, кроме последнего, при этом весовые коэффициенты изменяют в соответствии с последовательностью операций, включающей операции введения целочисленной переменной состояния фильтра и увеличения ее значения на целую постоянную величину при изменении цифрового отсчета на входе фильтра, задания числа наблюдений в одном цикле генерации весовых коэффициентов, расчета среднего значения и дисперсии для числа серий, представляющих собой последовательность однотипных наблюдений и соответствующих заданному числу наблюдений в предположении статистической независимости последовательных отсчетов на входе фильтра, принятия в качестве медианы или среднего значения последовательности наблюдений выходное значение фильтра, определения знака ошибки цифрового отсчета на входе фильтра относительно медианы или среднего значения и подсчета количества серий знаков ошибок за заданное число наблюдений, определения вероятности статистической независимости отсчетов на входе фильтра с использованием критерия серий за период,соответствующий числу наблюдений, умножения переменной фильтра на вероятность статистической независимости, округления полученной величины до ближайшего целого значения, которое присваивается переменной состояния фильтра, по которой производится перерасчет весовых коэффициентов фильтра. 2. Способ по п. 1, отличающийся тем, что последовательность операций дополнительно содержит операции введения целочисленной переменной приращения наблюдений,которую определяют после получениянаблюдений значением вероятности статистической независимости, изменения числа наблюдений на величину переменной приращения наблюдений, расчета среднего значения и дисперсии для нового числа наблюдений перед операцией наращивания переменной состояния. 3. Устройство для осуществления способа адаптивной фильтрации сигнала, содержащее аналого-цифровой преобразователь, отличающееся тем, что содержит последовательно соединенные блок наращивания переменной состояния, блок вычисления весового коэффициента, блок автрорегрессивного фильтра скользящего среднего, блок определения ошибки и ее знака, блок подсчета числа серий, блок проверки конца наблюдений, выходы которого соединены с блоком наращивания переменной наблюдений при сохранении переменной состояния, выход которого соединен с входом блока наращивания переменной состояния, и с блоком определения вероятности статистической независимости, выполненным с возможностью выполнения функции вычисления вероятности статистической независимости данных в последовательности изнаблюдений как отношение данных о плотности вероятности экспериментального числа серий к данным о плотности вероятности, соответствующей среднему числу серий, рассчитываемым исходя из предложения статистической независимости, входы которого связанывыходом блока проверки конца наблюдений и с выходом блока расчета среднего и дисперсии длянаблюдений при статистической независимости отсчетов, вход которого связан с выходом блока инициализации начальных установок и блок сброса переменной наблюдения с изменением переменной состояния. 4. Устройство по п. 3, отличающееся тем, что блок определения вероятности статистической независимости реализован с возможностью выполнения функции вычисления вероятности статистической независимости данных в последовательности изнаблюдений как вероятность отклонения, превышающего либо равного отклонению экспериментального числа серий, рассчитываемого исходя из предложения статистической независимости. 5. Устройство по п. 3., отличающееся тем, что блок определения вероятности статистической независимости реализован с возможностью выполнения функции вычисления вероятности статистической независимости данных в последовательности изнаблюдений, как нормированной вероятности попадания числа серий в интервал от единицы до значения экспериментального числа серий. 2 9322 1 2007.06.30 Изобретение относится к адаптивным фильтрам и может быть использовано в измерительной технике для обработки информативных сигналов, в системахидентификации неизвестных устройств и системах адаптивного управления технологическими процессами,в шумоподавителях, эквалайзерах и подавителях сигнала эхо, в детекторах модулированных сигналов для систем телеметрии и т.д. Известны способы адаптивной фильтрации и устройства для их осуществления, включающие аналого-цифровое преобразование и последующую фильтрацию цифровых последовательностей с помощью фильтров скользящего среднего с изменяемыми весовыми коэффициентами, имеющих конечную импульсную характеристику, причем весовые коэффициенты выбирают по вектору ошибки или невязки из перестраиваемой матрицы коэффициентов, рассчитывают на основе минимизации ошибок градиентным методом с поисковым определением компонент градиента или определяют методом наименьших квадратов 1-23. Данные способы и основанные на них устройства обладают следующими недостатками. Для реализации алгоритмов оценивания и расчета весовых коэффициентов требуется высокая вычислительная мощность, определяемая размерностью системы уравнений на один шаг при численном интегрировании дифференциальных уравнений для аналоговых фильтров или алгебраических уравнений - для цифровых. Кроме того, фильтр с конечной импульсной характеристикой требует большого объема памяти для хранения усредняемых значений и матрицы весовых коэффициентов. Значительным недостатком известных адаптивных фильтров является ограниченное возрастание точности с течением времени даже при соблюдении в реальном процессе принятой модели шума, а также неустойчивая работа устройств, обусловленная неидентичностью предполагаемых и реальных моделей полезного сигнала и шума. При наличии нескольких локальных экстремумов в функциях ошибок или невязок градиентные методы с поисковым определением компонент градиента могут осуществлять выбор весовых коэффициентов, соответствующих экстремуму, не дающему абсолютно минимального значения ошибки или невязки. Использование статистических методов определения весовых коэффициентов также не обеспечивает устойчивости работы фильтра в случае нестационарности вероятностных характеристик процесса. По технической сущности и достигаемому результату близким к заявляемому является способ и устройство для выбора сигнала адаптивного фильтра в соответствии с типом или классом 24. В данном способе определяется принадлежность сигнала к классу движений, ошибок и к определенному пространственному классу (например, классу в пространстве состояний), после чего в соответствии с определенными классами выбираются весовые коэффициенты и сигналы фильтра. Операция аналого-цифрового преобразования,отсутствующая в техническом решении, описанном в 24, известна из других технических решений 1, 10, 14, 17, 21, 22. Недостатками данного способа и основанного на нем устройства являются высокая вычислительная мощность для реализации алгоритмов оценивания и расчета весовых коэффициентов большой объем памяти для хранения усредняемых значений, классов и весовых коэффициентов ограниченное возрастание точности с течением времени для стационарного процесса неустойчивая работа фильтра для нестационарных сигналов, не попадающих под сохраняемые или определяемые классы. Задачей изобретения является снижение требуемой вычислительной мощности и объема памяти, повышение точности при фильтрации последовательностей данных, имеющих стационарные вероятностные характеристики, и обеспечение устойчивости работы фильтра для нестационарных процессов. Поставленная задача достигается тем, что в способ адаптивной фильтрации, включающий аналого-цифровое преобразование и последующую фильтрацию цифровых последовательностей с помощью фильтров с изменяемыми весовыми коэффициентами по алгоритму, включающему определение знаков ошибок, дополнительно вводят целочисленную 3 9322 1 2007.06.30 переменную состояния фильтра и увеличивают ее значение на целую постоянную величину при изменении цифрового отсчета на входе фильтра задают число наблюдений (наблюдаемых значений цифровых отсчетов) в одном цикле генерации весовых коэффициентов рассчитывают среднее значение и дисперсию для числа серий (серией считают последовательность однотипных наблюдений, перед и после которой следуют наблюдения противоположного типа или вообще нет наблюдений), соответствующих заданному числу наблюдений в предположении статистической независимости последовательных отсчетов на входе фильтра принимают в качестве медианы или среднего значения последовательности наблюдений выходное значение фильтра определяют знак ошибки цифрового отсчета на входе фильтра относительно медианы или среднего значения последовательности наблюдений и подсчитывают количество серий знаков ошибок за заданное число наблюдений с использованием критерия серий определяют вероятность статистической независимости отсчетов на входе фильтра за период, соответствующий числу наблюдений умножают переменную состояния фильтра на вероятность статистической независимости,округляют полученную величину до ближайшего большего целого значения, которое присваивают переменной состояния фильтра по переменной состояния производят перерасчет весовых коэффициентов фильтра, в качестве которого используют авторегрессивный фильтр скользящего среднего с нулевым значением коэффициентов перед всеми отдельными цифровыми отсчетами, кроме последнего, имеющий бесконечную импульсную характеристику. Отличие предлагаемого способа от известных состоит в том, что в него дополнительно введены целочисленная переменная состояния фильтра с увеличением ее значения на целую постоянную величину при изменении цифрового отсчета на входе фильтра задание числа наблюдений в одном цикле генерации весовых коэффициентов расчет среднего значения и дисперсии для числа серий, соответствующих заданному числу наблюдений в предположении статистической независимости последовательных отсчетов на входе фильтра использование в качестве среднего значения или медианы последовательности наблюдений выходного значения фильтра подсчет количества серий знаков ошибок за заданное число наблюдений определение с использованием критерия серий вероятности статистической независимости отсчетов на входе фильтра за период, соответствующий числу наблюдений умножение переменной состояния фильтра на вероятность статистической независимости, округление полученной величины до ближайшего большего целого значения, которое присваивается переменной состояния фильтра перерасчет весовых коэффициентов фильтра по переменной состояния, использование в качестве фильтра авторегрессивного фильтра скользящего среднего с нулевым значением коэффициентов перед всеми отдельными цифровыми отсчетами, кроме последнего, имеющего бесконечную импульсную характеристику. Сущность способа и реализующих его устройств поясняются на фиг. 1, фиг. 2, фиг. 3,фиг. 4, фиг. 5, фиг. 6, фиг. 7, фиг. 8. На фиг. 1 представлен алгоритм способа. На фиг. 2 приведена структурная схема адаптивного фильтра с непосредственным подсчетом количества серий, реализующего способ, алгоритм которого изображен на фиг. 1. На фиг. 3 приведен адаптивный фильтр с подсчетом количества серий по числу положительных и отрицательных исходов, реализующий способ, алгоритм которого изображен на фиг. 1. На фиг. 4 показан вариант исполнения операции и блоков определения вероятности статистической независимости 11 (фиг. 1-фиг. 3) с кусочно-линейной аппроксимацией вероятностного критерия по отношению плотностей вероятности. На фиг. 5 показан вариант исполнения операции и блоков определения вероятности статистической независимости 11 (фиг. 1-3) по функции распределения серий. На фиг. 6 приведена функциональная схема устройства, реализующего способ, представленный на фиг. 1, с авторегрессивной фильтрацией при помощи фильтра скользящего среднего второго порядка с ненулевым значением коэффициента перед последним цифровым отсчетом, имеющего бесконечную 4 9322 1 2007.06.30 импульсную характеристику. На фиг. 7 представлен алгоритм способа с переменным числом наблюдений. На фиг. 8 приведена структурная схема адаптивного фильтра с непосредственным подсчетом количества серий, реализующего способ с переменным числом наблюдений, алгоритм которого изображен на фиг. 7. Алгоритм способа, представленный на фиг. 1, включает операции аналого-цифрового преобразования (АЦП) (блок 1) наращивания переменной состояния (блок 2) инициализации начальных установок (блок 3) расчета среднего и дисперсии длянаблюдений при статистической независимости отсчетов (блок 4) вычисления весового коэффициента(блок 5) авторегрессивной фильтрации скользящего среднего (блок 6) определения ошибки и ее знака (блок 7) подсчета числа серий (блок 8) проверки конца наблюдений(блок 9) наращивания переменной наблюдений при сохранении переменной состояния(блок 10) определения вероятности статистической независимости (блок 11) сброса переменной наблюдений с изменением переменной состояния (блок 12). Блоки устройства, приведенного на фиг. 2, имеют названия, идентичные названиям блоков на фиг. 1 при совпадении номеров. Переменные, использованные в адаптивном фильтре на фиг. 2, имеют следующее назначение- целая переменная состояния фильтра- целая постоянная наращивания переменной- число наблюдений цифровых отсчетов- вероятность статистической независимости отсчетов на входе фильтра за период, соответствующий числу наблюдений- переменная наблюдений, обеспечивающая счет текущего числа наблюдений- шаг дискретизации АЦП (интервал времени, за который осуществляется одно преобразование аналогового сигнала в цифровой код), -ый шаг дискретизации АЦП соответствует последнему цифровому отсчету- ошибка между цифровым отсчетом АЦП на -ом шаге дискретизации и цифровым выходом авторегрессивного фильтра скользящего среднего -1 - ошибка между цифровым отсчетом АЦП на (-1)-ом шаге дискретизации и цифровым выходом авторегрессивного фильтра скользящего среднего -1 - знак ошибки на (-1)-ом шаге дискретизации АЦП- знак ошибки на -ом шаге дискретизации АЦП- экспериментальное число серий,- число положительных (с положительной ошибкой) и отрицательных(с отрицательной ошибкой) исходов занаблюдений при их статистической независимости- среднее значение числа серийзанаблюдений при статистической независимости наблюдений, т.е. при отсутствии тренда- среднеквадратичное отклонение числа серийзанаблюдений при статистической независимости наблюдений (2 - дисперсия)- цифровой отсчет АЦП на последнем -ом шаге- среднее значение отсчетов АЦП зашагов- операция округления до ближайшего большего целого- весовой коэффициент фильтра. Блоки устройства на фиг. 3 имеют названия, идентичные названиям блоков на фиг. 1 при совпадении номеров. Переменные в адаптивном фильтре на фиг. 3 аналогичны переменным, использованным в устройстве, изображенном на фиг. 2. Назначением переменных, - является подсчет числа положительных (с положительной ошибкой) и отрицательных (с отрицательной ошибкой) исходов занаблюдений в реальном процессе. На фиг. 4 показан вариант исполнения операции и блоков определения вероятности статистической независимости 11 (фиг. 1 - фиг. 3) с кусочно-линейной аппроксимацией вероятностного критерия по отношению плотностей вероятности. На фиг. 4 а приведена структурная схема блока определения вероятности статистической независимости 11 при линейной аппроксимации вероятностного критерия по отношению плотностей вероятности, на фиг. 4 - зависимость вероятности статистической независимости от относительной расстройки экспериментального числа серий относительно их среднего значения. На фиг. 5 показан вариант исполнения операции и блоков определения вероятности статистической независимости 11 (фиг. 1 - фиг. 3) по функции распределения серий. На фиг. 5 а приведена структурная схема блока определения вероятности статистической не 5 9322 1 2007.06.30 зависимости 11 по функции распределения серий, на фиг. 5 б - зависимость вероятности статистической независимости от относительной расстройки экспериментального числа серий относительно их среднего значения. Блоки устройства на фиг. 6, имеют названия, идентичные названиям блоков на фиг. 1 при совпадении номеров, переменные аналогичны переменным, использованным в устройстве, представленном на фиг. 2. Назначение переменных- 2,- состоит в хранении средних значений отсчетов АЦП на ( - 2) и ( - 1) шагах соответственно. Блоки способа, представленного на фиг. 7, имеют названия, идентичные названиям блоков на фиг. 1. Дополнительными в способе на фиг. 7 являются операция определения переменной приращения наблюдений , которую выполняет блок 13, и операция определения числа наблюдений , выполняемая блоком 14. Блоки устройства, представленного на фиг. 8, имеют названия, идентичные названиям блоков на фиг. 7 при совпадении номеров. Переменные в адаптивном фильтре на фиг. 8 аналогичны переменным, использованным в устройстве, изображенном на фиг. 2. Дополнительно введенные переменные имеют следующее назначение- минимальное число наблюдений в серии-переменная приращения наблюдений- операция округления до ближайшего меньшего целого. Сущность способа основывается на использовании критерия серий для оценки статистической независимости или подверженности тренду данных. Нестационарность вероятностных характеристик потока данных приводит к появлению тренда или отсутствию статистической независимости. Поскольку наблюдения или оценка параметров данных могут иметь самые разнообразные функции распределения, то исследования данных удобно проводить на основе свободных от их распределений непараметрических методов,в которых относительно функций распределения данных не делается никаких предположений. Примерами таких процедур являются критерий серий и критерий инверсий, причем критерий серий является более предпочтительным, поскольку не требует хранения в памяти всей выборки исследуемых значений. Серией называется последовательность однотипных наблюдений, перед и после которой следуют наблюдения противоположного типа или же вообще нет никаких наблюдений 25. Для последовательностинаблюдений случайной величины у каждое наблюдение значения у (1, 2 ) можно отнести к одному из двух классов, обозначаемых каки (-). Например, при выполнении условия, где- среднее значение или медиана всей выбранной последовательности у наблюдение можно отнести к классу , т.е. к классу наблюдений с ошибкой 0 в противном случае наблюдение относят к классу (-) (к классу наблюдений с ошибкой е 0). Можно модифицировать классификацию наблюдений, отбрасывая наблюдения с ошибкой е 0 или относя такие наблюдения к тому классу, к которому относилось предыдущее наблюдение. В результате образуется последовательность наблюдений вида наблюдения 1 2 3 4 5 6 7 8 9 10 11 12 серии В этой последовательности из 20 наблюдений имеется 12 серий. Число серий,появившихся в последовательности наблюдений, позволяет выяснить являются ли отдельные результаты статистически независимыми наблюдениями одной и той же случайной величины. Считается, что если последовательностьнаблюдений состоит из независимых исходов одной и той же случайной величины, т.е. если вероятность отдельных исходов) или (- не меняется от наблюдения к наблюдению, то выборочное распределение числа 6 9322 1 2007.06.30 серийявляется случайной величиной, распределенной по нормальному закону 25, со средним значением 2(2)2 (1) При статистической независимости/2, что позволяет преобразо вать среднее значение и дисперсию к виду 25.(4) 4(1) Более точный расчет для малых значенийприводит к следующим выражениям для среднего числа серий 2(6) 2 которые могут быть использованы вместо формул (1) и (3) соответственно. Стандартный алгоритм критерия серий после определения , 2 итребует задания уровня значимости и сравнения экспериментального числа серийс границами принятия гипотезы статистической независимости процесса, определяемыми относительнопо уровню значимости. Еслиокажется вне этой области, то гипотезу статистической независимости отвергают с принятым уровнем значимости, в противоположном случае процесс считают статистически независимым. В предлагаемом способе адаптивной фильтрации, алгоритм которого приведен на фиг. 1, использовано определение уровня значимости, соответствующего принятию гипотезы статистической независимости по заданным значениям , 2 и , т.е. уровня значимости, соответствующего границам - . Через уровень значимости или связанные с ним величины можно определить вероятность статистической независимости данных. Сокращение памяти, необходимой для хранения отдельных значений усредняемой величины, в предлагаемом способе достигается использованием авторегрессивного фильтра скользящего среднего с ненулевым значением коэффициента только перед последним значением усредняемой величины (блок 6) 26. Весовые коэффициенты перед остальными отдельными отсчетами равны нулю, что исключает необходимость хранения в памяти всех цифровых отсчетов с выхода АЦП (блок 1), кроме последнего. Пошаговое возрастание точности для последовательности статистически независимых данных, имеющих стационарные вероятностные характеристики, обеспечивается за счет наращивания постоянной состояния фильтра, осуществляемого блоком 2. При этом снижается весовой коэффициент перед последним цифровым отсчетом и увеличивается вклад в последующую величину среднего значения предыдущего среднего (средних) (блок 5). Увеличение переменной состояния производится в цикле для каждого значения цифрового отсчета, причем в пределах одной последовательностинаблюдений цифровые отсчеты с АЦП принимаются статистически независимыми. Для каждого наблюдения анализируется знак ошибки (блок 7) и подсчитывается текущее число серий знаков ошибок (блок 8). В качестве текущего среднего значения или медианы последовательности наблюдений при расчете ошибки ис 2 9322 1 2007.06.30 пользуется выходной сигнал авторегрессивного фильтра. В каждом цикле алгоритма проверяется условие достижениянаблюдений по значению переменной наблюдений (блок 9). Если набор последовательности изнаблюдений не закончен, то производится наращивание переменной наблюдений (блок 10) с последующим переходом к наращиванию переменной состояния, т.е. к блоку 2. По достижениюпри проверке конца наблюдений переходят к определению вероятности статистической независимости в законченной последовательности (блок 11), которая производится сопоставлением экспериментального числа серий , определенного в блоке 8, с расчетными характеристиками для последовательностинаблюдений при их статистической независимости, получаемыми в блоке 4 после инициализации начальных установок (блок 3). Вероятность статистической независимости умножают на переменную состояния фильтра, округляют полученную величину до ближайшего большего целого значения, которое присваивают переменной состояния фильтра, и сбрасывают переменную наблюдений (блок 12), после чего переходят к новому набору последовательностинаблюдений. Авторегрессивные фильтры скользящего среднего имеют бесконечную импульсную характеристику. В предлагаемом алгоритме ограниченное время переходного процесса фильтра, реализующего операцию в блоке 6, обеспечивается за счет снижения весового коэффициента перед предыдущим значением (значениями) среднего при увеличении коэффициента перед последним цифровым отсчетом АЦП, что происходит при изменении переменной состояния по вероятности статистической независимости. В случае получения вероятности, близкой к нулю, коэффициент перед предыдущим значением среднего также приближается к нулю, а коэффициент перед последним цифровым отсчетом АЦП - к единице, что означает использование в качестве среднего значения фильтра последнего цифрового отсчета. Статистическая независимость последовательности данных нарушается при появлении нестационарности случайного процесса, т.е. при непостоянстве вероятностных характеристик (например, среднего значения, медианы последовательности и т.д.) случайного процесса, поэтому предлагаемый алгоритм адаптируется к случайным нестационарным процессам в случае, когда спектральные составляющие дрейфа вероятностных характеристик имеют период, превышающий время выборкинаблюдений. Функциональная схема устройства, реализующего предлагаемый способ, приведена на фиг. 2. В этом устройстве применен непосредственный подсчет серий , осуществляемый блоком 8, причем наблюдение с нулевой ошибкой получает знак ошибки предыдущего наблюдения (блок 7). Операцию авторегрессивной фильтрации скользящего среднего выполняет экспоненциальный фильтр, являющийся фильтром первого порядка 26, работа которого определяется уравнением-1(1-). Модификация уравнения (7) к виду, приведенному в блоке 6 на фиг. 2, связана с экономией памяти за счет среднего значения на предыдущем шаге. Возможность такой модификации обусловлена тем, чтофактически становится - с приходом на блок 6 нового цифрового отсчета с АЦП . Изменение переменной состояния в блоке 12 производится при помощи оператора округления до ближайшего большего целого - . Действие оператора состоит в добавлении 1 к целой части числа в случае, когда дробная часть не равна нулю. Например,(25,)26(30,6)31(0,). Вероятность статистической независимости процесса в блоке 11 определяется как отношение плотности вероятности, соответствующей экспериментальному , к плотности вероятности, соответствующей среднему числу серий , рассчитываемому по формуле (6), при рассчитанной по формуле (4) дисперсии 2 (т.е. в предположении статистической независимости). Такой критерий вероятности статистической независимости более удобен, так как требует меньше вычислительных средств, чем критерии с непосредственным определением уровня значимости. 9322 1 2007.06.30 Устройство, изображенное на фиг. 3, отличается от предыдущего исполнением блока подсчета числа серий. Вместо непосредственного подсчетаанализом изменения знака ошибки введен подсчет числа положительных (с положительной ошибкой) и отрицательных (с отрицательной ошибкой) исходов занаблюдений в реальном процессе (, -) с последующим определениемпо формуле (5), т.е. среднее значение, соответствующее экспериментальными -, принято в качестве экспериментального числа серий . Для определения вероятности статистической независимости данных могут быть использованы и другие критерии. На фиг. 4 показан вариант исполнения операции и блоков определения вероятности статистической независимости 11 (фиг. 1-фиг. 3) с кусочнолинейной аппроксимацией вероятностного критерия по отношению плотностей вероятности. Вероятность статистической независимости можно определять в виде(8)1 2 где 1 - коэффициент сжатия-растяжения вероятности статистической независимости,01. При 12 снижается скорость изменения весовых коэффициентов фильтра,т.е. замедляется процесс адаптации фильтра, но снижается чувствительность к спектральным составляющим трендов, имеющим период, сопоставимый с длительностью одной последовательности наблюдений. Для определения вероятности статистической независимости можно использовать также функцию распределения случайной величины . В качествеможно использовать вероятность попадания в интервал, не включающий - , т.е. вероятность отклонения,превышающего либо равного отклонению экспериментального числа серий от среднего числа серий, рассчитываемого в предположении статистической независимости. Тогда выражение дляприобретает вид В некоторых случаях стационарность вероятностных характеристик случайного процесса сохраняется и при отсутствии статистической независимости данных, что ограничивает область применимости стандартного критерия серий в адаптивном фильтре. Применимость способа в таких случаях обеспечивается предположением, что серии распределены по закону, отличающемуся от нормального до некоторого значениятолько постоянным множителем. При получении числа серий, превышающего , вероятностные характеристики процесса можно считать стационарными, несмотря на отсутствие статистической независимости данных при нормальном распределении серий. Тогда для числа серий можно ввести распределение вида2 0, ,где К 2 - коэффициент, определяемый из условия нормировки 0,Для распределения, описываемого формулой (12), в качествеможно использовать вероятность попадания в интервал -, т.е. функцию распределения . Тогдавыражается в виде( ) На фиг. 5 показан вариант исполнения операции и блоков определения вероятности статистической независимости 11 (фиг. 1 - фиг. 3) по функции распределения серий в соответствии с формулой (13) при. Формулу (13) можно модифицировать с учетом того, что экспериментальное число серий 1, т.е. распределение серий не является строго нормальным. Тогда (13) преобразуется к виду т.е. вероятность статистической независимости данных в последовательности изнаблюдений определяется как нормированная вероятность попадания числа серий в интервал от единицы до значения экспериментального числа серий . Для реализации операции авторегрессивной фильтрации скользящего среднего, выполняемой блоком 6 на фиг. 1, могут быть использованы и фильтры более высоких порядков,получаемые последовательным соединением фильтров первого порядка с одинаковыми частотами среза. При этом один параметропределяет все весовые коэффициенты. Функциональная схема устройства, реализующего предлагаемый способ, с авторегрессивной фильтрацией при помощи фильтра скользящего среднего второго порядка с ненулевым значением коэффициента перед последним цифровым отсчетом приведена на фиг. 6. Способ, алгоритм которого приведен на фиг. 1, отличается от способа, приведенного на фиг. 7, тем, что дополнительно вводят целочисленную переменную приращения наблюдений , которая определяется после получениянаблюдений значением вероятности статистической независимости данных изменяют число наблюдений на величину переменной приращения наблюдений рассчитывают среднее значение и дисперсию для нового числа наблюдений и переходят к наращиванию переменной состояния. Введение переменной приращения наблюденийпозволяет автоматически корректировать число наблюдений в одной последовательности. Получение вероятности статистической независимости данных в законченной последовательности большей, чем 0,5, позволяет увеличить число наблюдений в следующей последовательности, т.е. задать 0. При 0,5 число наблюдений остается неизменным. В случае, когда 0,5, число наблюдений в следующей последовательности должно быть меньше, чем в предыдущей, т.е.0. Однако для 0,5 число наблюдений в следующей последовательности не должно стать меньше некоторого значения , величина которого определяется вероятностными ограничениями критерия серий 25. Обычно 20. На фиг. 8 приведена функциональная схема устройства, реализующего способ адаптивной фильтрации с переменным числом наблюдений. Определение переменной приращения наблюдений в блоке 13 производится с использованием операции округления до ближайшего меньшего целого - операции , которая действует следующим образом(-9,)-10 (9,2)9. Пересчет среднего значенияи дисперсии 2 производится в блоке 4 после окончания последовательностинаблюдений, которое фиксируется по переменной наблюдений , обеспечивающей счет текущего числа наблюдений. Таким об 10 9322 1 2007.06.30 разом, для каждой последовательности используется свое числонаблюдений, причем минимальное значение наблюдений задается при инициализации начальных установок,т.е. в блоке 3. Предлагаемый способ обеспечивает повышение точности при фильтрации процессов со стационарными вероятностными характеристиками за счет неограниченного увеличения учитываемых отсчетов, поскольку при сохранении стационарности сохраняется и статистическая независимость, обеспечивающая работу цифрового фильтра с бесконечной импульсной характеристикой с увеличивающейся для каждого следующего наблюдения постоянной времени фильтра за счет наращивания переменной состояния и снижения весового коэффициента перед каждым новым отсчетом АЦП. Алгоритм работы адаптивного фильтра не требует хранения весовых коэффициентов и отдельных отсчетов АЦП, кроме последнего, что обуславливает снижение требуемой вычислительной мощности и объема памяти по сравнению с другими способами адаптивной фильтрации. Способ базируется на применении критерия серий, которые подчиняются априорно известным законам даже при непредсказуемом поведении ошибок, отклонений, средних значений последовательности данных, корреляционных характеристик усредняемых случайных величин и т.д.,что повышает устойчивость работы устройств, построенных на основе предлагаемого способа..479139013, 1988. 22.. ,.,.472603616, 1988. 23. Справочник по теории автоматического управления/Под ред. А.А. Красовского. М. Наука, 1987. - С. 712. 24.,,,. ,.619216120, 2001 (прототип). 25. Дж. Бендат, А. Пирсол. Прикладной анализ случайных данных / Пер. с англ. - М. Мир, 1989. - С. 540. 26. Густав Олссон, Джангуидо Пиани. Цифровые системы автоматизации и управления. - СПб. Невский Диалект, 2001. - С. 557. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: H04B 1/10, G01F 17/10
Метки: адаптивной, устройство, фильтрации, осуществления, способ
Код ссылки
<a href="https://by.patents.su/15-9322-sposob-adaptivnojj-filtracii-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" rel="bookmark" title="База патентов Беларуси">Способ адаптивной фильтрации и устройство для его осуществления</a>
Устройство для адаптивной ступенчатой токовой защиты от междуфазных коротких замыканий
Номер патента: 5111
Опубликовано: 30.06.2003
Авторы: Глинский Евгений Владимирович, Тишечкин Анатолий Артемович, Бобко Николай Николаевич, Романюк Федор Алексеевич
Метки: устройство, междуфазных, адаптивной, ступенчатой, токовой, коротких, замыканий, защиты
Текст:
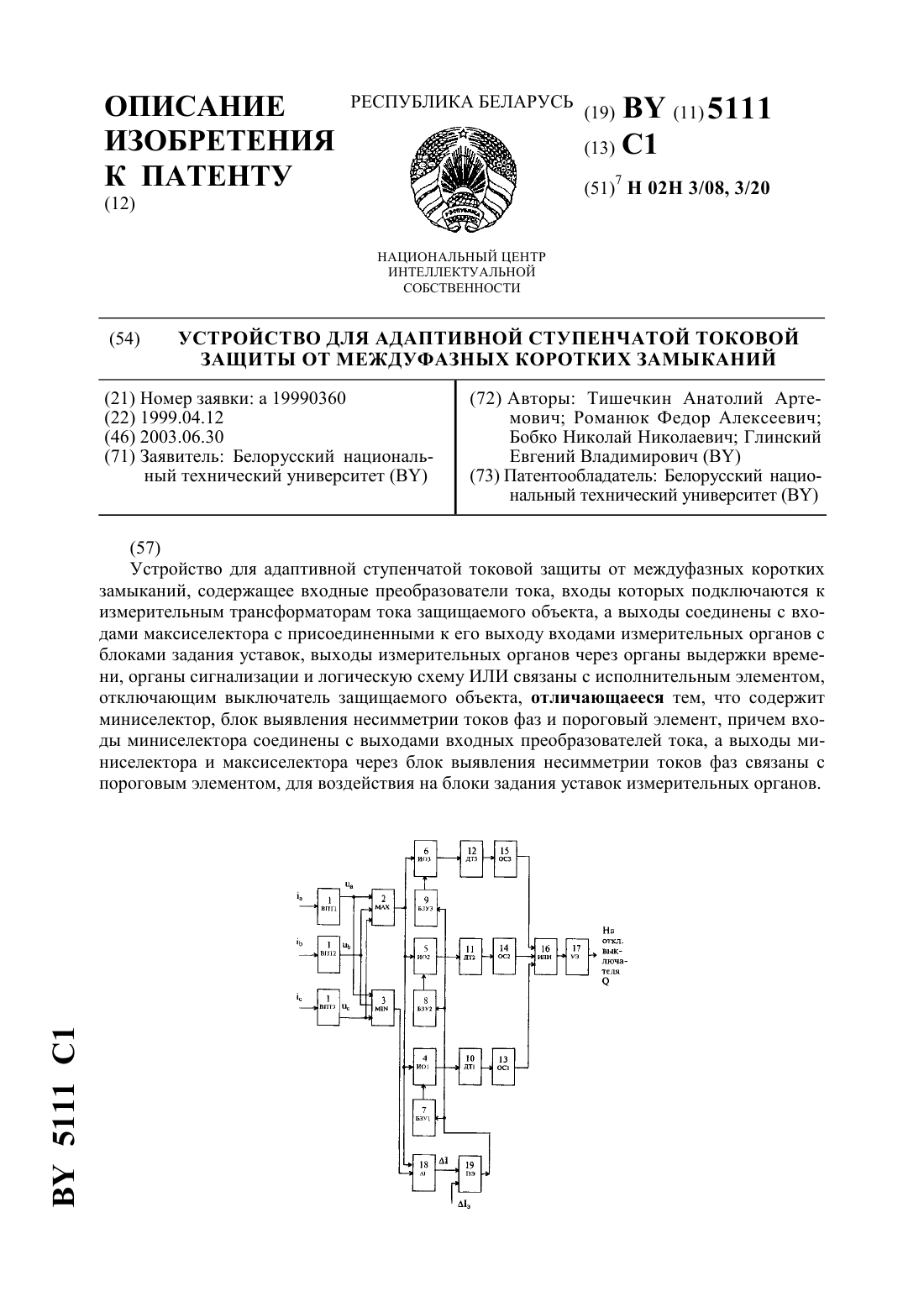
...(как правило двухфазного) КЗ в конце защищаемой линии, что приводит к уменьшению тока срабатывания ИО этой ступени. к к(4)Ток срабатывания МТЗ отстраивается от максимальных нагрузочных токов нес при возникновении несимметричного режима работы в сети без учета самозапуска электродвигательной нагрузки, который является симметричным режимом и сопровождается протеканием практически одинаковых токов во всех фазах защищаемого объекта к кср 2 отс...
Способ микрошагового управления шаговым двигателем и устройство для его осуществления
Номер патента: 7005
Опубликовано: 30.06.2005
Авторы: Межинский Юрий Сергеевич, Павлюковский Игорь Анатольевич, Карпович Святослав Евгеньевич, Ковалев Сергей Владимирович, Дайняк Игорь Викторович
МПК: H02P 8/00, G05B 19/00
Метки: управления, способ, осуществления, шаговым, микрошагового, двигателем, устройство
Текст:
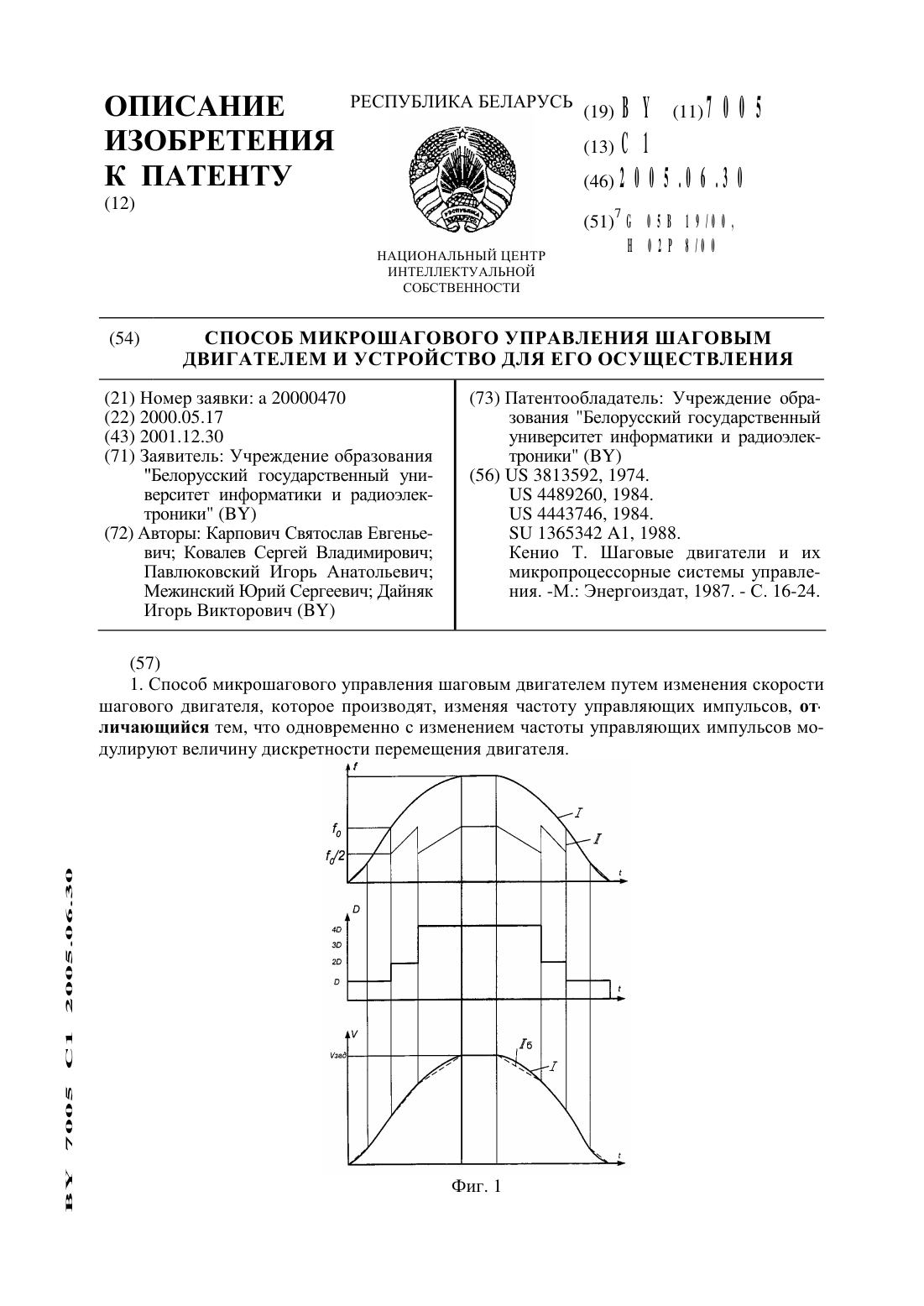
...двигателя по командам с микропроцессора.Сущность предложенного изобретения раскрывается посредством фигур, на которых представленона фиг. 1 - графическая интерпретация предложенного способа управления посредством временных зависимостей Кг), 130), /(г) (кривая 1 - прототип, кривая П - заявляемый способ), где Г - частота управляющих импульсов, В - дискретность перемещения двигателяна фиг. 2 - функциональная схема устройства, реализующего...
Способ охранной сигнализации и устройство для его осуществления
Номер патента: 2780
Опубликовано: 30.06.1999
Автор: Муха Александр Григорьевич
МПК: G08B 13/24
Метки: устройство, осуществления, охранной, сигнализации, способ
Текст:
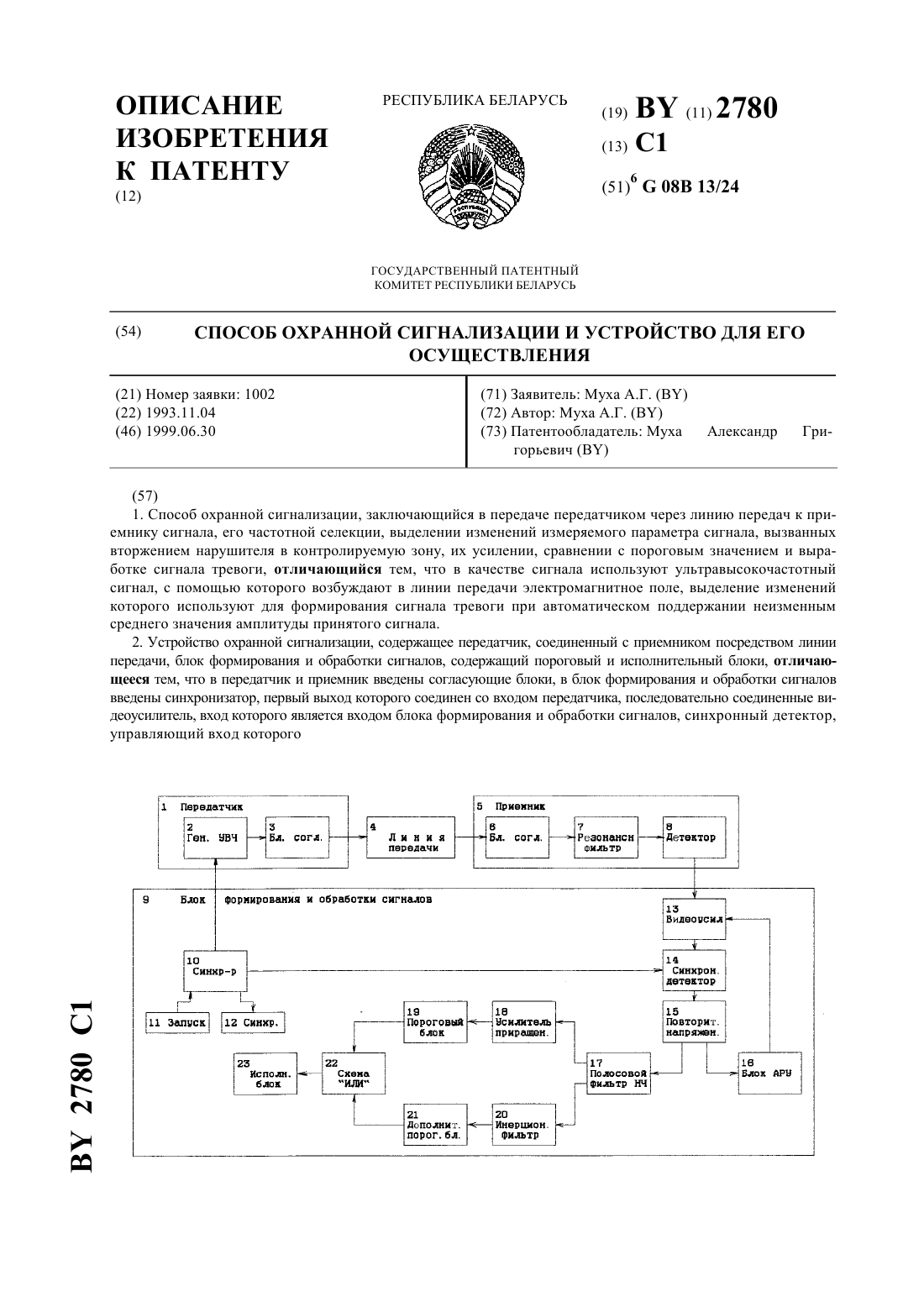
...4 - линия передачи 5 - приемник, состоящий из согласующего блока 6, входного резонансного фильтра 7 и детектора 8 9 - блок формирования и обработки сигналов, состоящий из синхронизатора 10, разъемов 11 внешнего запуска и 12 синхронизации, видеоусилителя 13, синхронного детектора 14,повторителя напряжения 15, блока выработки напряжения автоматической регулировки усиления 16, полосового фильтра нижних частот 17, усилителя приращений 18,...
Способ компенсации перекрестных и/или эхосигналов и устройство для его осуществления
Номер патента: 130
Опубликовано: 30.09.1994
Автор: Хайнрих Шенк
МПК: H04B 3/20
Метки: устройство, перекрестных, осуществления, способ, компенсации, эхосигналов
Текст:
...компенсатора 9обеспечивает освобождение компенсирод ванного принимаемого сигнала от создаю-щнЯхж помехи дополнительных колебаний. Перед адаптивной компенсацией искажений сначала может происходить упомянутая промежуточная коррекция компенсированного принимаемого сигнала.для чегойв цепь. идУЩУЮ от компенсирующего блока 4 к адаптивному компенсатору 9.компенсатор 11 искажений и дополнительный адаптивный компенсатор 19 (фиг. 3)....
Способ измерения влажности вязких и сыпучих веществ и устройство для его осуществления
Номер патента: 1227
Опубликовано: 14.06.1996
Авторы: Кознев Александр Васильевич, Молочников Виктор Викторович, Молочников Александр Викторович
МПК: G01N 27/22
Метки: устройство, влажности, способ, измерения, вязких, сыпучих, веществ, осуществления
Текст:
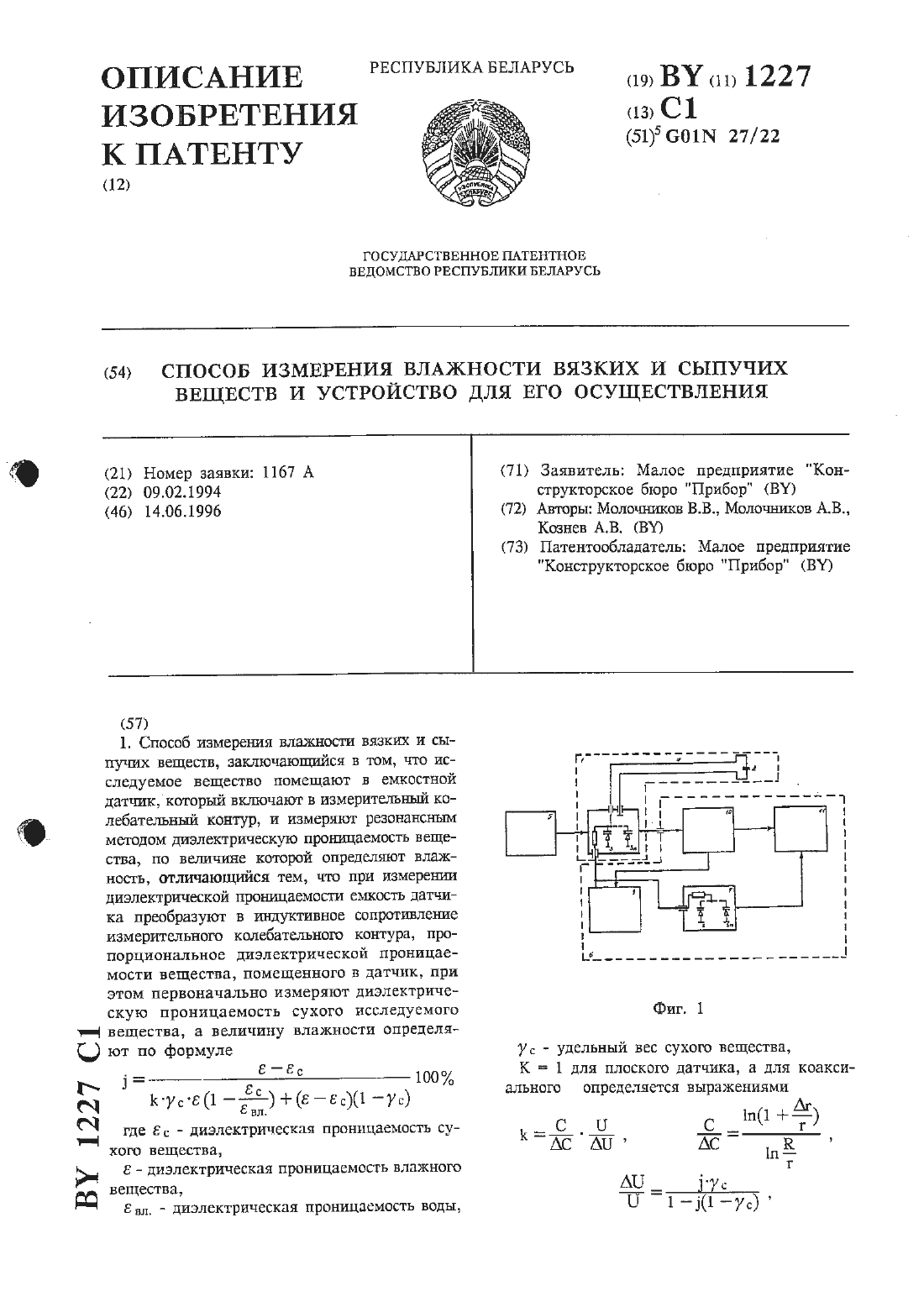
...- удельный вес сухого веществагде П объем влажного вещества в датчикеАС - емкость с воздушным диэлектриком участка датчика П, заполненного водойг, К радиусы внутреннего и внешнего электродов коаксиального датчика.В устройстве для осуществления способа измерения влажности вязких и сыпучих веществ,содержащем емкостной датчик, включенный в измерительный колебательный контур с п электрически перестраиваемыми емкостями,генератор высокой...
Предыдущий патент: Погрузчик-смеситель-раздатчик кормов
Следующий патент: Устройство для инкубации икры
Случайный патент: Разбрасыватель сыпучих материалов для сельскохозяйственных машин