Аэро-гидродинамический комплекс виг-5

Текст
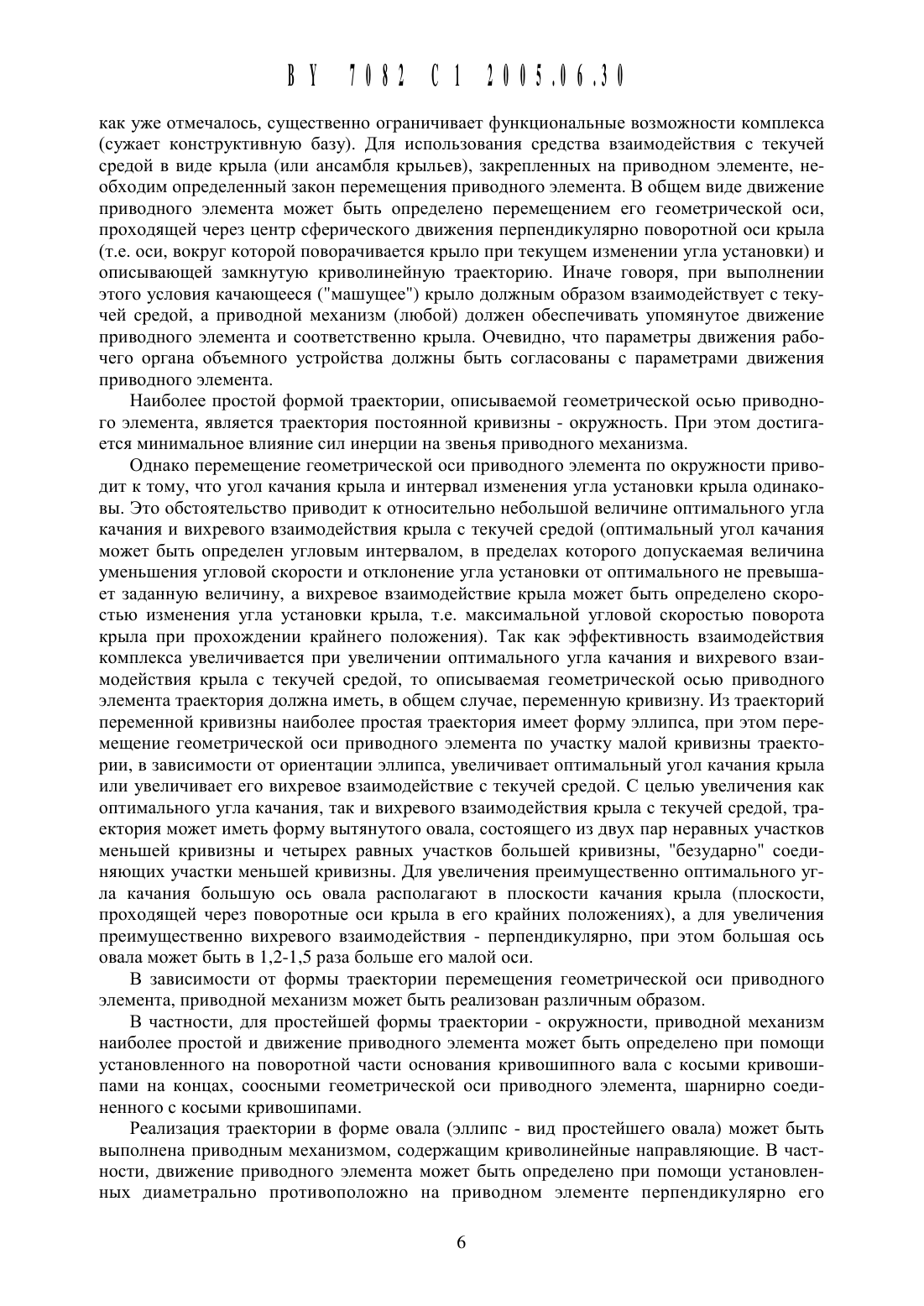
3. Комплекс по п. 1, отличающийся тем, что основание состоит из поворотной И неповоротной частей, шарнирно соединенных между собой своими трубчатыми участками.4. Комплекс по п. 1, отличающийся тем, что приводной механизм снабжен установленной на приводном элементе в плоскости качания крыла опорной направляющей, взаимодействующей с опорнь 1 м катком, установленным на поворотной части основания соосно его трубчатому участку.5. Комплекс по п. 3, отличающийся тем, что объемное устройство выполнено с рабочим органом в виде подвижного блока Четырех попарно соединенных и размещенных по окружности тороидальных Цилиндров, образующих совместно с размещенными в них тороидальнь 1 ми поршнями рабочие камеры, при этом поршни жестко соединены попарно штоками, шарнирно установленными на поворотной части основания.6. Комплекс по п. 3, отличающийся тем, что объемное устройство содержит корпус с,по меньшей мере, одним сферическим участком, по экватору которого установлены поршни с возможностью поворота и азимутального перемещения, и рабочий орган, сопряженный со сферическим участком корпуса и снабженный меридиональными полостями,образующими совместно с размещенными в них поршнями и сферическим участком корпуса рабочие камеры, при этом элементы подвода и отвода рабочего тела выполнены в виде размещенных в корпусе каналов и окон, выходящих в перемещающиеся относительно них рабочие камеры.7. Комплекс по п. 6, отличающийся тем, что каналы в корпусе объемного устройства соединены с коаксиальными каналами, размещенными по центру в трубчатом участке поворотной части основания.8. Комплекс по п. 2, отличающийся тем, что движение приводного элемента определено перемещением его геометрической оси, проходящей через Центр сферического движения перпендикулярно поворотной оси крыла и описывающей замкнутую криволинейную траекторию.9. Комплекс по п. 8, отличающийся тем, что траектория имеет форму окружности.10. Комплекс по п. 8, отличающийся тем, что траектория имеет форму вытянутого овала, состоящего из двух пар неравных участков меньшей кривизны и четырех равных участков большей кривизны, при этом большая ось овала расположена в плоскости качания крыла или перпендикулярно ей и в 1,2-1,5 раза больше малой оси овала.11. Комплекс по п. 9, отличающийся тем, что движение приводного элемента определено при помощи установленного на поворотной части основания кривошипного вала с косыми кривошипами на концах, соосными геометрической оси приводного элемента,шарнирно соединенного с косыми кривошипами.12. Комплекс по п. 10, отличающийся тем, что движение приводного элемента определено при помощи установленных диаметрально противоположно на приводном элементе перпендикулярно его геометрической оси направляющих, обкатывающихся по роликам, установленным на поворотной части основания.13. Комплекс по п. 10, отличающийся тем, что движение приводного элемента определено при помощи установленных диаметрально противоположно на приводном элементе по его геометрической оси роликов, обкатывающихся по направляющим,установленным на поворотной части основания.14. Комплекс по любому из пп. 11-13, отличающийся тем, что снабжен закрепленным на приводном элементе кожухом, охватывающим приводной механизм и объемное устройство.Изобретение относиться к крыльевым устройствам нестационарного взаимодействия с текучей средой, в частности к аэро-гидродинамическим комплексам типа машущее крь 1 ло, соединенного с объемным устройством.Известно устройство 1 (ветродвигатель с поршневым гидронасосом), содержащего крь 1 льевое средство взаимодействия с текучей средой - горизонтальное Крыло (лопасть),соединенное средней частью с входящим в приводной механизм приводным элементом(т.е. конечной подвижной деталью привода крыла), установленным на основании с возможностью качания в одной плоскости. Приводной элемент выполнен, в данном случае, в виде коромысла, шарнирно установленного на поворотной части основания (поворотной головке) и снабженного на одном конце противовесом, а на втором конце крылом. Приводной механизм, задающий кинематику крыла (угол качания и изменение установочного угла в зависимости от текущего угла качания), содержит тяги, шарниры, рычаги, упоры,образующие параллелограммный механизм. Поворот крыла вокруг своей оси при прохождении крайних положений происходит за счет ударного контакта соответствующих закрепленных на крыле рычагов с упорами, установленными на поворотной головке. Реактивная сила взаимодействия крыла с текучей средой передается на основание теми же звеньями приводного механизма, что и движущая сила, - шарниром установки крыла на приводном элементе, шарниром установки приводного элемента на поворотной части основания, карусельнь 1 м шарниром установки поворотной части основания на неподвижной части основания (башне). Объемное устройство (гидронасос) выполнено в виде неподвижно установленного на основании вертикального цилиндра, образующего совместно с размещенным в нем рабочим органом (т.е. замыкающим рабочую камеру подвижным элементом, в данном случае - поршнем двухстороннего действия) рабочие камеры, снабженные элементами подвода и отвода рабочего тела. Рабочий орган объемного устройства кинематически соединен с приводным элементом (коромыслом) при помощи длинных штанг с шарнирами на концах.Известное устройство характеризуется качанием приводного элемента и крыла в одной плоскости, что приводит к росту инерционных сил, действующих на звенья приводного механизма в моменты резкой остановки крыла в его крайних положениях, и соответственно, к росту вибраций и потерь, уменьшению надежности. Дополнительно можно отметить,что для устройств с качающимся коромыслом с разнесенными массами на концах характерна относительно малая частота качания крыла и соответственно малая частота вращения рабочего вала, что снижает удельную мощность устройства. Наличие длинных штанг и шарниров в приводе гидронасоса увеличивает массу подвижных частей, что дополнительно снижает частоту рабочих ходов насоса, а также увеличивает число отказов привода и соответственно надежность устройства в целом.Наиболее близким к предлагаемому устройству по технической сущности (по кинематике и относительно короткой кинематической связи приводного элемента с рабочим органом объемного устройства) является ветроустановка 2, содержащая средство взаимодействия с текучей средой - ветроприемное устройство, соединенное с входящим в приводной механизм приводным элементом, установленным на основании с возможностью качательного сферического движения, т.е. движения, при котором все постоянные и мгновенные оси качания и поворота пересекаются в одной точке - центре сферического движения. Ветроприемное устройство имеет вид зонта, образованного совокупностью концентрических многоугольников из соединенных концами тормозящих ветер узких пластин. Приводной элемент выполнен, в данном случае, в виде мачты, несущей на верхнем конце ветроприемное устройство, а на нижнем конце противовес. При этом приводной элемент установлен нижней частью на основание при помощи карданного шарнира. В приводной механизм также входят крестообразно установленные пружины растяжения,соединяющие нижнюю часть приводного элемента с основанием для возврата приводного элемента в среднее положение (установка работает от порывов ветра). Реактивная сила взаимодействия ветроприемного устройства с текучей средой передается на основание теми же звеньями приводного механизма, что и движущая сила, - карданным шарниром установки приводного элемента и соединяющими его с основанием пружинами. Объемноеустройство (гидронасос) выполнено в виде горизонтальных, неподвижно установленных на основании крестообразно размещенных цилиндров, образующих совместно с размещеннь 1 ми в них рабочими органами (в данном случае - двухсторонними поршнями) рабочие Камеры, снабженные элементами подвода и отвода рабочего тела, в частности, каналами и самодействующими клапанами. Рабочие органы объемного устройства (поршни) кинематически соединены с приводным элементом (мачтой) при помощи шатунов,снабженных на концах сферическими шарнирами.Известное устройство характеризуется сферическим качанием приводного элемента по произвольной траектории в пределах телесного угла, ограниченного растяжением пружин. Учитывая упругую связь приводного элемента с основанием и малую частоту качания,инерционные силы, в данном случае, оказывают существенно меньшее отрицательное влияние на звенья (сферические Шарниры) кинематической связи рабочих органов (поршней) с приводным элементом. Однако наличие сложной шатунно-шарнирной связи приводного элемента с поршнями уменьшает надежность работы устройства, особенно при передаче больших силовых потоков. Можно дополнительно отметить, что известное устройство, как техническое решение, предназначено для взаимодействия с текучей средой,быстро меняющей скорость, что резко ограничивает его конструктивную базу, например,не позволяет на его основе создавать аэро-гидродвижители.Основным техническим результатом изобретения является принципиальное отсутствие ограничения, вызываемого допустимыми нагрузками в звеньях приводного механизма, на величину силового потока, передаваемого рабочему телу (или получаемого от него), так как приводной механизм только определяет закон перемещения приводного элемента и практически не участвует в передаче силового потока. При этом одновременно достигается упрощение конструкции, уменьшение механических потерь, массы и габаритов, а также увеличение надежности работы комплекса. Эти результаты достигаются во всех случаях реализации комплекса как следствие интеграции приводного элемента и средства взаимодействия с текучей средой, так и интеграцией приводного элемента с рабочим органом объемного устройства. Дополнительными техническими результатами являютсярасширение конструктивной базы за счет использования в качестве средства взаимодействия с текучей средой крыла (лопасти) или ансамбля крыльев, что позволяет использовать предлагаемое техническое решение как основу для создания не только различных аэро-гидродвигателей, но и движителейувеличение эффективности взаимодействия с текучей средой за счет использования подъемных сил вместо сил торможениядальнейшее существенное повышение надежности и компактности комплекса за счет выполнения объемного устройства на основе известного технического решения - Машины Голубева В.И. Здальнейшее увеличение эффективности взаимодействия с текучей средой за счет применения оптимальных траекторий перемещения крыла.Для этого в известном аэро-гидродинамическом комплексе, содержащем средство взаимодействия с текучей средой, соединенное с входящим в приводной механизм приводным элементом, установленным на основании с возможностью качательного сферического движения, а также объемное устройство, содержащее соединенный с приводным элементом рабочий орган и, по меньшей мере, одну рабочую камеру с элементами подвода и отвода рабочего тела, достижение основного технического результата во всех случаях реализации устройства обусловлено тем, что объемное устройство выполнено с качательнь 1 м сферическим движением рабочего органа, соединенного с приводным элементом непосредственно или через демпфирующий элемент, например, в виде упругой проставки. Т.е. соединение рабочего органа с приводным элементом выполнено без промежуточных кинематических звеньев.Предложенное общее техническое решение для всех случаев выполнения охватывает различные конкретные варианты его реализации.С целью расширения конструктивной базы (функциональных свойств), в частности,возможности использования комплекса в качестве как двигателя, так и движителя с одновременным повышением эффективности взаимодействия с текучей средой за счет использования подъемной силы, средство взаимодействия с текучей средой выполнено в виде, по меньшей мере, одного крыла, соединенного корневой частью с приводным элементом.(предполагается, что средство взаимодействия с текучей средой может быть выполнено в виде ансамбля крыльев, объединенных в корневой части).Для обеспечения возможности управлять положением плоскости качания крыла, например, при изменении направления ветра, или направления тяги для комплекса в виде движителя, основание состоит из поворотной и неповоротной частей, шарнирно соединенных между собой своими трубчатыми участками.Для исключения вредного действия реактивных сил (стремящихся опрокинуть плоскость качания крыла), передаваемых на основание через приводной элемент и рабочий орган, что увеличивает потери на трение, приводной механизм снабжен установленной на приводном элементе в плоскости качания крыла опорной направляющей, взаимодействующей с опорным катком (ползуном), установленным на трубчатом участке поворотной части основания.Объемное устройство, как пример реализации, может быть выполнено с рабочим органом в виде подвижного блока четырех попарно соединенных и размещенных по окружности тороидальных цилиндров с размещенными в них с образованием рабочих камер поршнями, при этом поршни соединены попарно штоками, шарнирно установленными на основании (можно отметить, что роль рабочего органа может играть блок четырех попарно соединенных поршней, взаимодействующих с попарно соединенными цилиндрами,шарнирно установленными на основании. Однако в этом случае увеличивается вредное действие сил инерции при поворотах пар цилиндров, имеющих существенно большую массу, по сравнению с парами поршней).Для еще более эффективной реализации основного технического решения путем предельного повышения компактности, в качестве объемного устройства может быть использовано известное устройство Машина Голубева В.И. 3. Это объемное устройство содержит корпус с, по меньшей мере, одним сферическим участком, по экватору которого установлены поршни (перемычки - в 3) с возможностью поворота и азимутального перемещения, и рабочий орган, сопряженный со сферическим участком корпуса и снабженный меридиональными полостями, образующими совместно с размещенными в них поршнями и сферическим участком корпуса рабочие камеры (т.е. рабочий орган имеет вид сферического тела, образующего блок равномерно размещенных по азимуту меридиональных цилиндров). Можно отметить, что известное устройство предполагает вь 1 полнение рабочего органа в трех вариантах, а именно рабочий орган охватывается корпусом,рабочий орган охватывает корпус, рабочий орган размещен между эквидистантными стенками корпуса. Элементы подвода и отвода рабочего тела могут быть выполнены в виде размещенных в корпусе каналов и окон, выходящих в перемещающиеся относительно их рабочие камеры (в соответствии с принятыми фазами распределения рабочего тела). Такое выполнение элементов подвода и отвода рабочего тела делает объемное устройство обратимым, т.е. способным работать в качестве насоса или двигателя.В свою очередь, каналы в корпусе объемного устройства могут быть соединены с коаксиальными каналами, размещенными по центру в трубчатом участке поворотной части основания, что позволяет упростить последующее герметичное соединение этих поворотных каналов с неподвижными каналами, размещенными в неповоротной части основания.При использовании в комплексе известного средства взаимодействия с текучей средой(ветроприемного устройства), приводной механизм перемещения приводного элемента по случайной траектории может быть выполнен по принципу известного механизма прототипа. Однако такое выполнение с точки зрения аэро-гидродинамики мало эффективно и,
МПК / Метки
Метки: аэро-гидродинамический, комплекс, виг-5
Код ссылки
<a href="https://by.patents.su/11-7082-aero-gidrodinamicheskijj-kompleks-vig-5.html" rel="bookmark" title="База патентов Беларуси">Аэро-гидродинамический комплекс виг-5</a>
Двигательно-движительный комплекс ВИГ-4
Номер патента: 7036
Опубликовано: 30.06.2005
Автор: Голубев Владимир Иосифович
Метки: виг-4, комплекс, двигательно-движительный
Текст:
...цапфами втулки.Известное устройство характеризуется сферическим движением приводного элемента,при котором траектория его геометрической оси, совпадающей с осью косого кривошипа,имеет вид окружности. При этом поворотная ось крыла описывает на сферической поверхности траекторию в виде вытянутой в плоскости качания восьмерки (плоскость качания проходит через ее концы и середину). Это приводит к существенному уменьшению инерционных сил, так как в...
Двигательно-движительный комплекс ВИГ-3
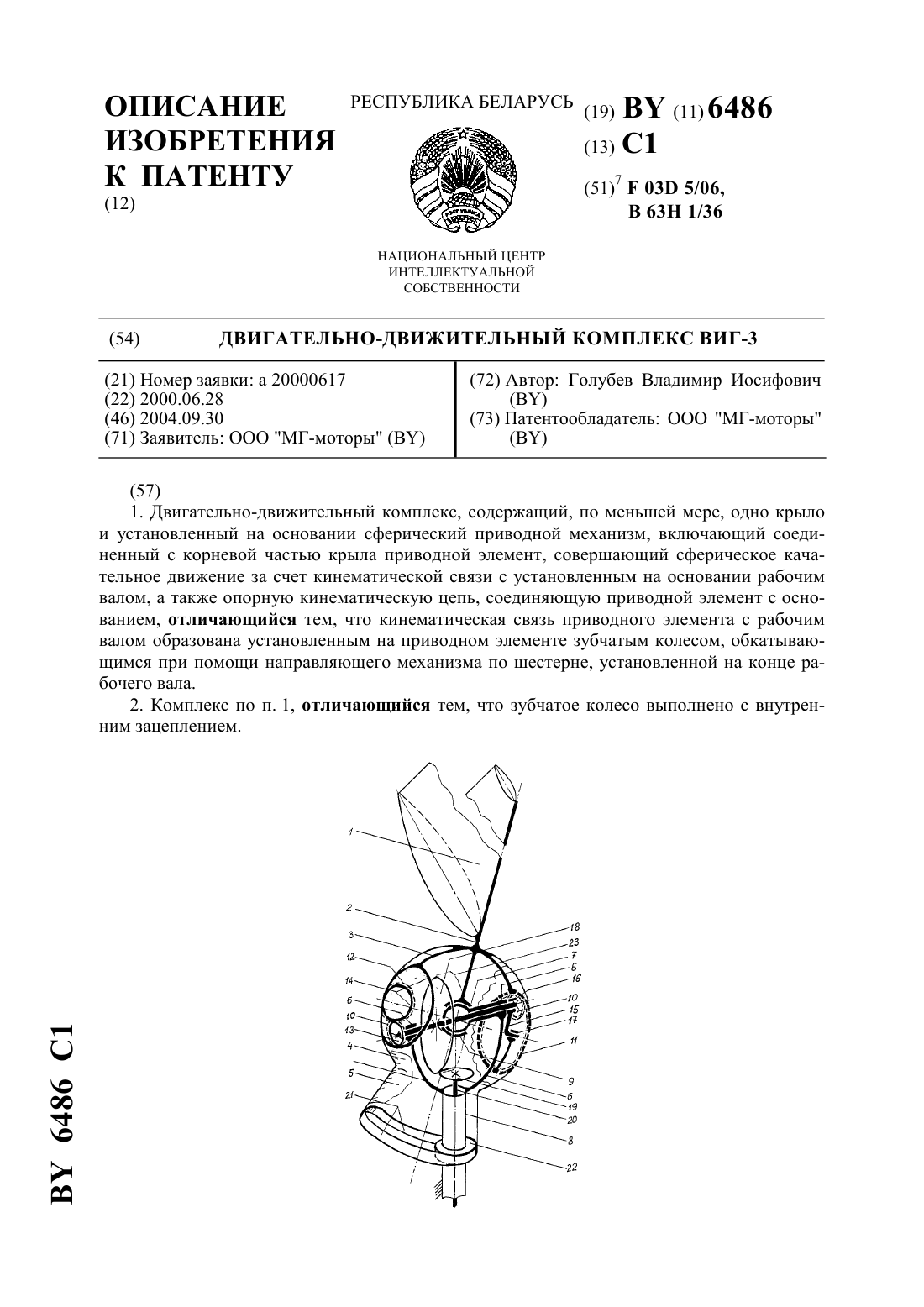
Номер патента: 6486
Опубликовано: 30.09.2004
Автор: Голубев Владимир Иосифович
Метки: двигательно-движительный, виг-3, комплекс
Текст:
...варианта должны обеспечивать сферическое перемещение приводного элемента и правильное зацепление зубчатых колес путем исключения радиальных сил в зацеплении и возможности осевого смещения приводного элемента относительно рабочего вала. В частности, строго сферическое перемещение приводного элемента может быть достигнуто вводом в состав направляющего механизма центрующего сферического шарнира,соединяющего приводной элемент с основанием. В...
Двигательно-движительный комплекс ВИГ -1
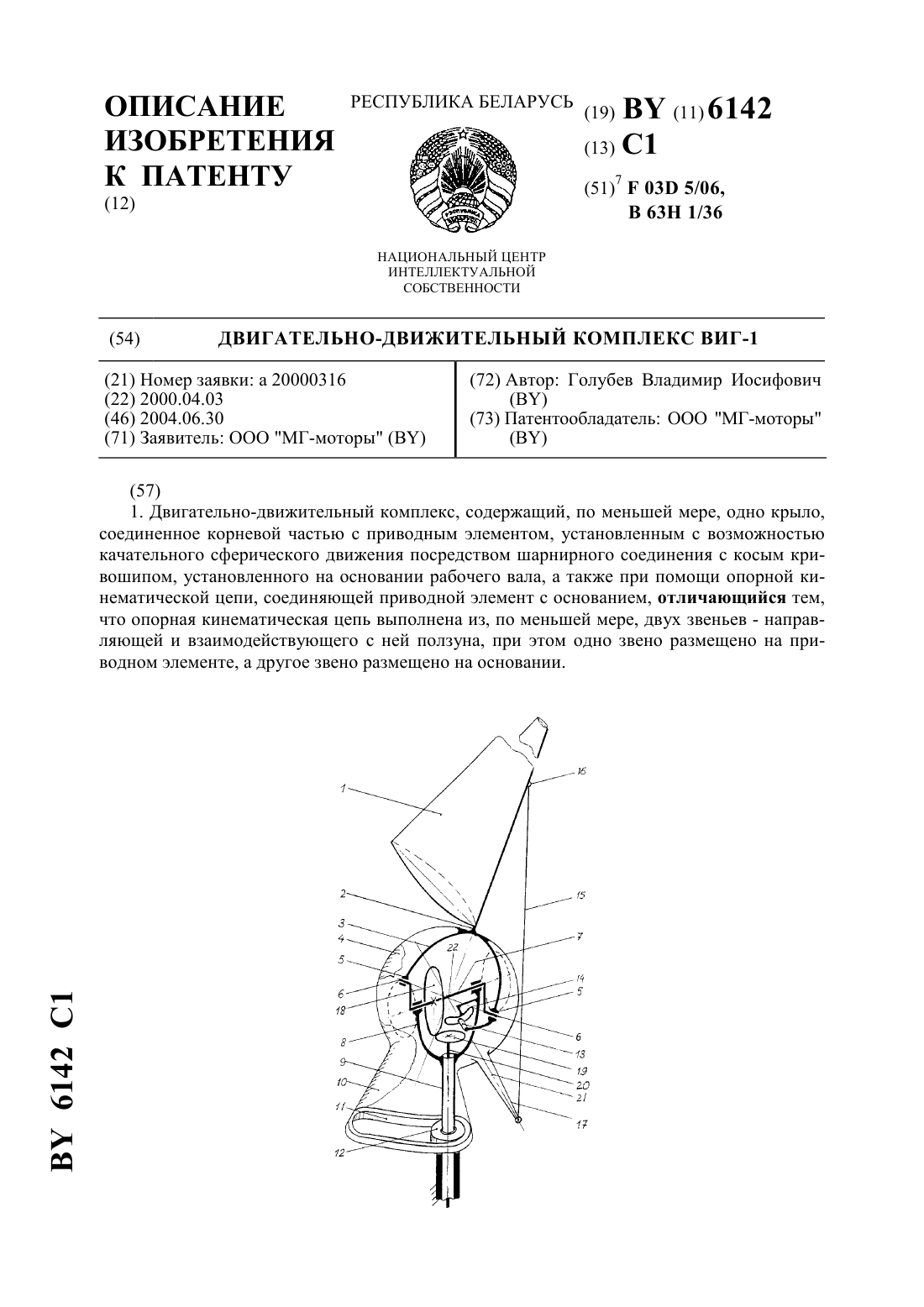
Номер патента: 6142
Опубликовано: 30.06.2004
Автор: Голубев Владимир Иосифович
Метки: двигательно-движительный, виг, комплекс
Текст:
...плоскостях (что необходимо для их кинематического согласования) и работают параллельно. Основание может быть снабжено трубчатой частью, а рабочий вал может быть выполнен с двумя соосными кривошипами на концах, соединенными, соответственно, двумя шарнирами с приводным элементом, при этом рабочий вал может быть снабжен установленным на нем в средней части зубчатым коническим колесом, взаимодействующим с конической шестерней, установленной...
Комплекс водоснабжения
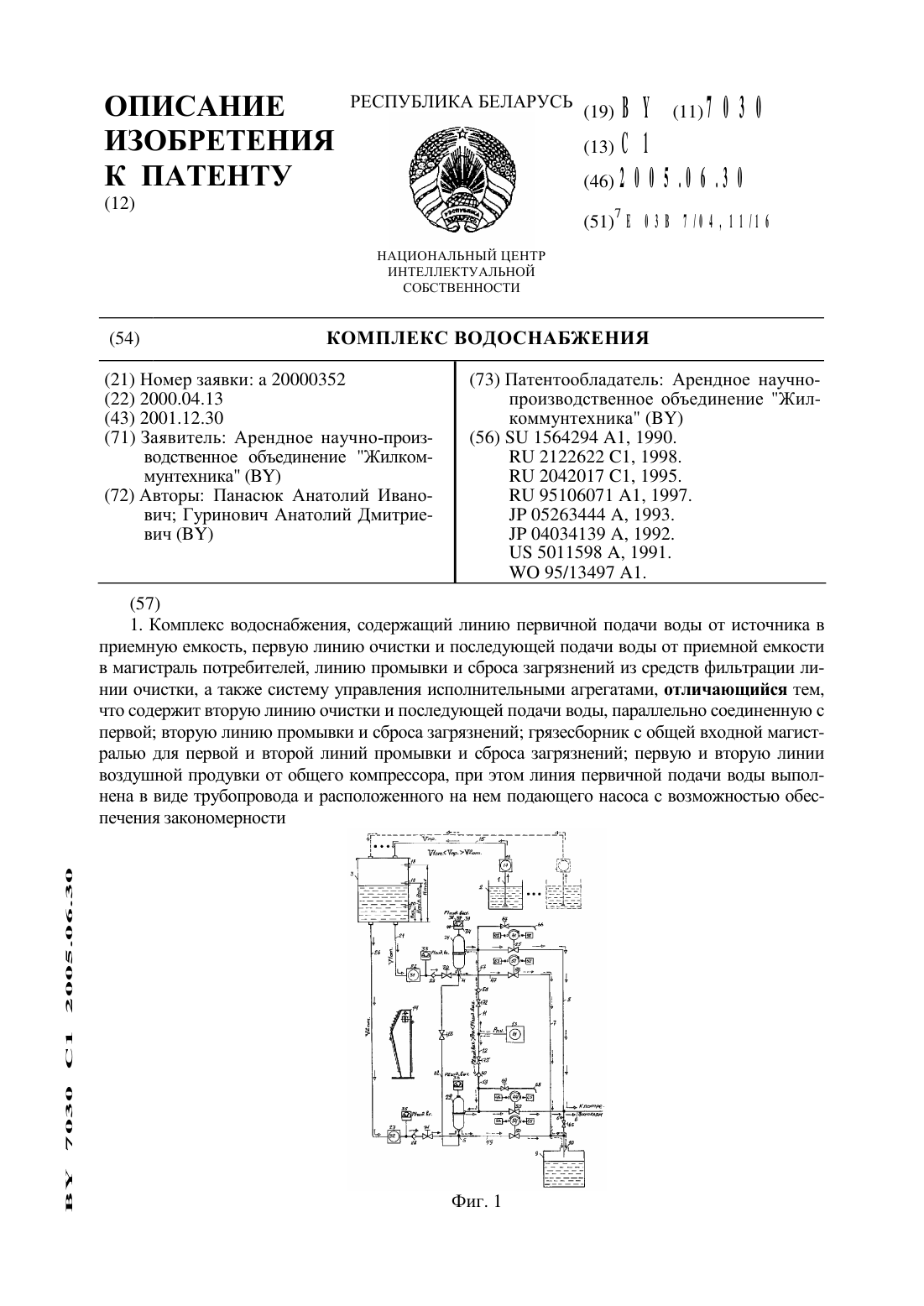
Номер патента: 7030
Опубликовано: 30.06.2005
Авторы: Гуринович Анатолий Дмитриевич, Панасюк Анатолий Иванович
МПК: E03B 11/16, E03B 7/04
Метки: водоснабжения, комплекс
Текст:
...в положении,отвечающем предельно-допустимому загрязнению соответствующего скорого фильтра, а в датчике давления на выходе каждого скорого фильтра задатчик минимально допустимо ВУ 7030 С 12005.06.30го давления установлен относительно измерительной щкалы в положении, отвечающем предельно-допустимому загрязнению соответствующего скорого фильтра и снижению интенсивности подачи воды потребителям, при этом задатчик максимально допустимого...
Ветро-гидродвигатель ВИГ – 2
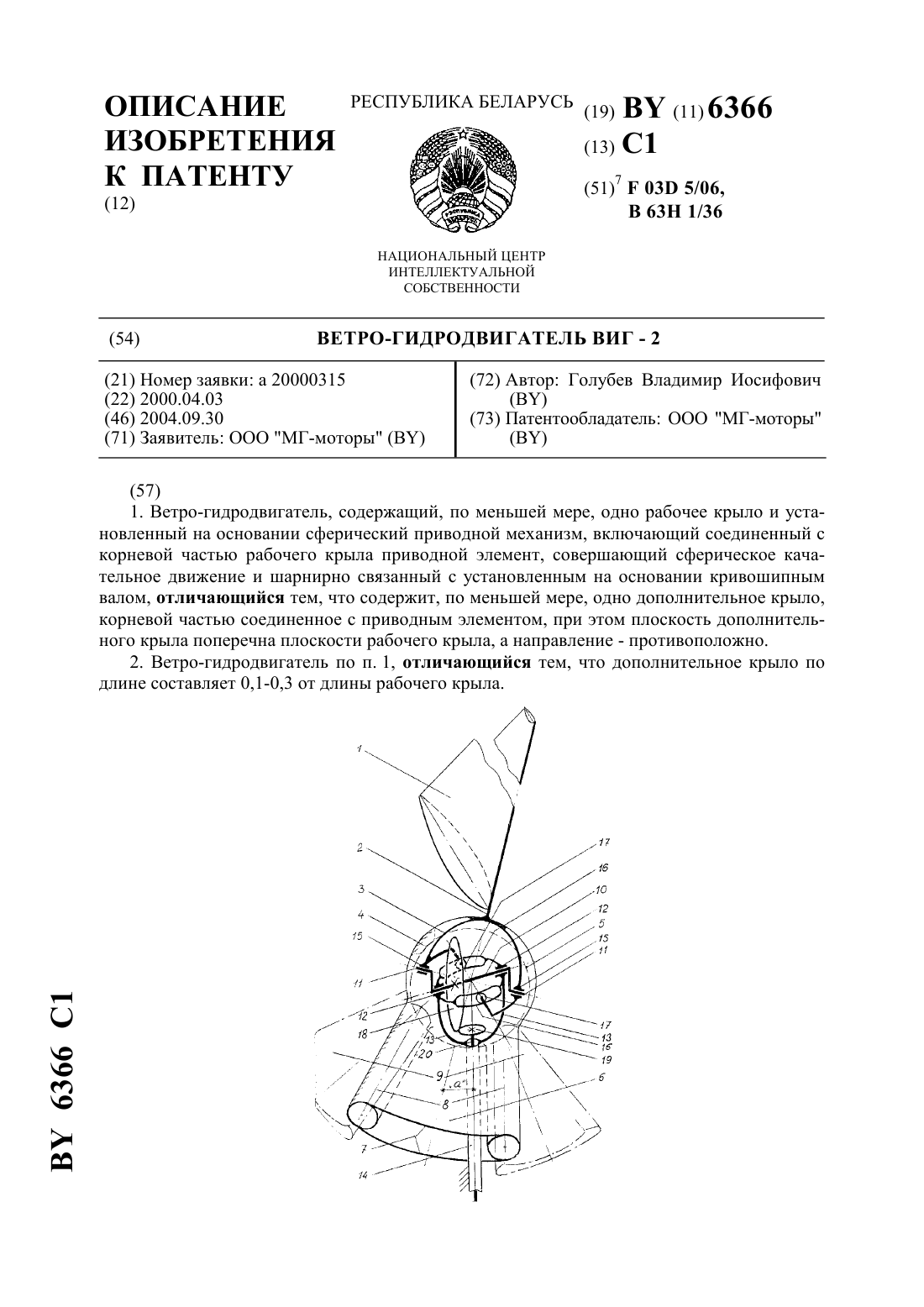
Номер патента: 6366
Опубликовано: 30.09.2004
Автор: Голубев Владимир Иосифович
Метки: ветро-гидродвигатель, виг
Текст:
...две установленные на основании и противоположно размещенные в плоскости кривошипного вала перпендикулярно плоскости качания крыльев направляющие, взаимодействующие с двумя установленными на приводном элементе ползунами. Кривошипный вал может быть выполнен с двумя противоположно направленными кривошипами на концах, соединенными, соответственно, двумя шарнирами с приводным элементом, при этом кривошипный вал может быть снабжен...
Предыдущий патент: Доильный стакан
Следующий патент: Контейнер, способ и устройство изготовления контейнера, а также способ и устройство наполнения контейнера
Случайный патент: Устройство для мойки и резки корнеклубнеплодов