Способ обнаружения полезного сигнала в белом аддитивном шуме

Текст
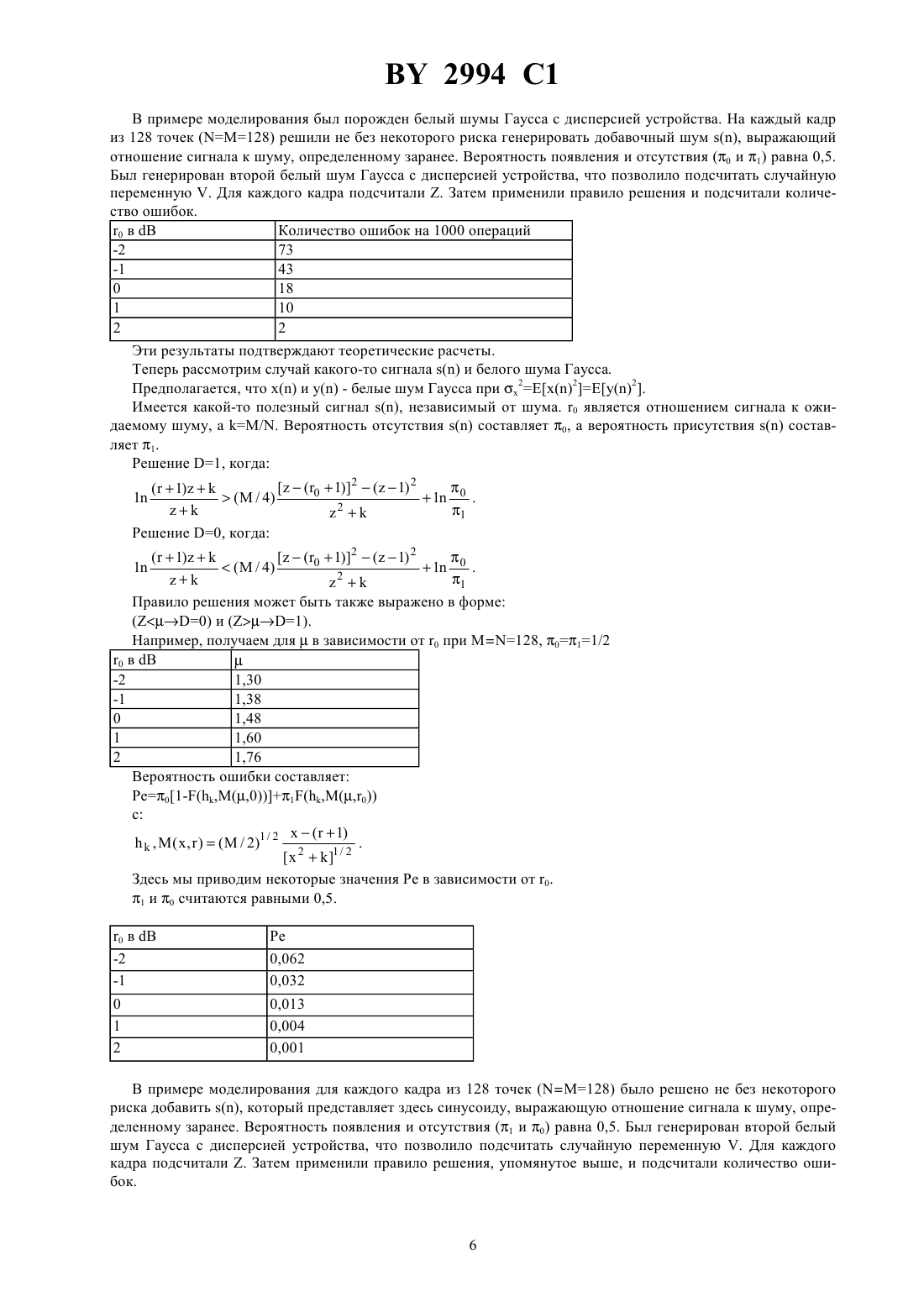
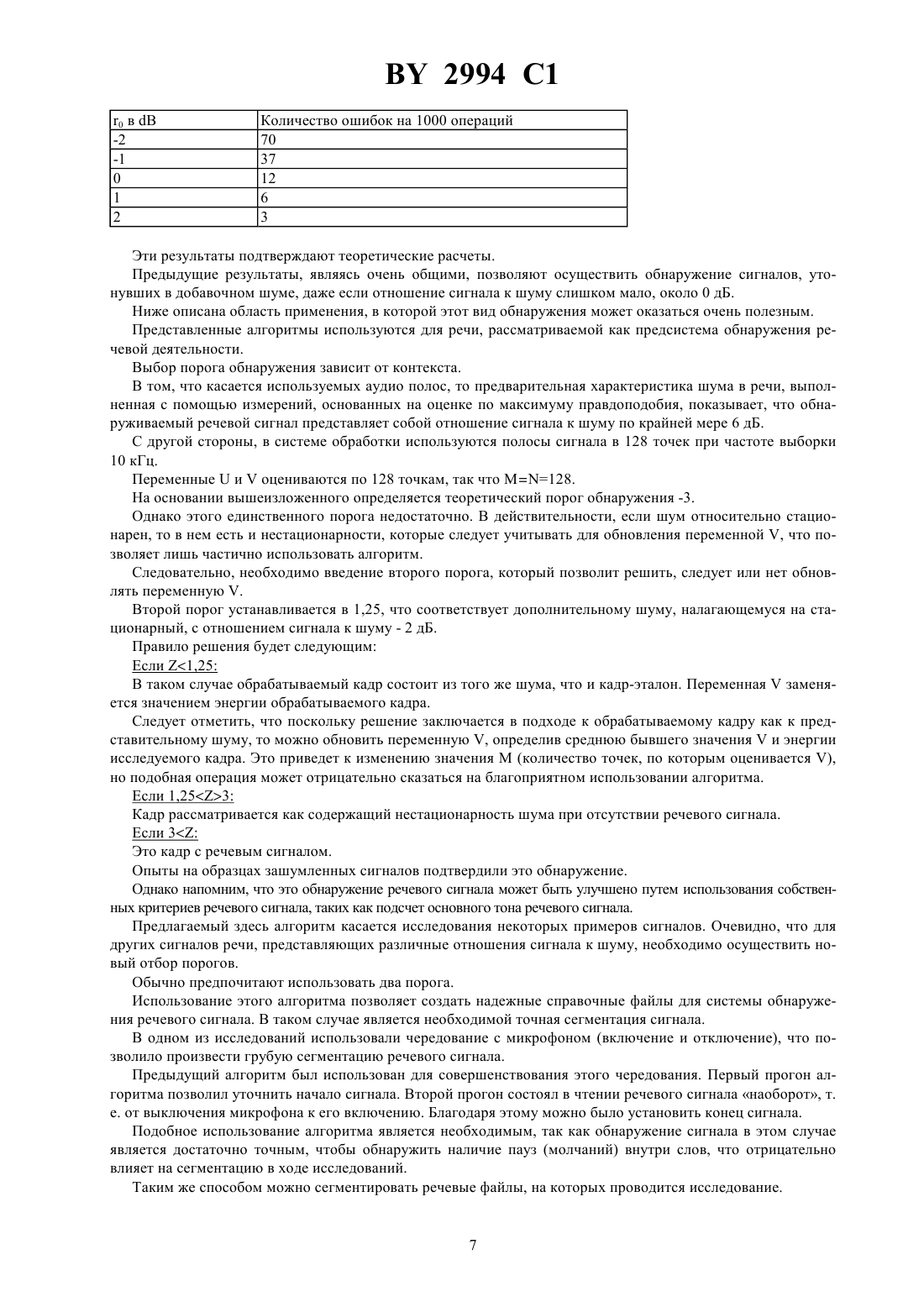
ГОСУДАРСТВЕННЫЙ ПАТЕНТНЫЙ КОМИТЕТ РЕСПУБЛИКИ БЕЛАРУСЬ СПОСОБ ОБНАРУЖЕНИЯ ПОЛЕЗНОГО СИГНАЛА В БЕЛОМ АДДИТИВНОМ ШУМЕ(57) 1. Способ обнаружения полезного сигнала в белом аддитивном шуме, для которого известно соотношение 0 сигнал/ожидаемый шум обрабатываемого сигнала, заключающийся в измерении параметров шума и обрабатываемого сигнала в цифровой форме по М иточкам соответственно, отличающийся тем, что измеряют среднюю энергию шума по М точкам при отсутствии полезного сигнала, среднюю энергию обрабатываемого зашумленного сигнала поточкам, подсчитывают отношениеэнергии обрабатываемого зашумленного сигнала к энергии шума, рассчитывают теоретический порогобнаружения, с которым сравнивают отношениеэнергий, и по результатам сравнения судят о наличии либо отсутствии полезного сигнала. 2. Способ по п.1, отличающийся тем, что теоретический порог обнаружения рассчитывают путем решения дляследующего уравнения(01)2(1) 2 1 гдесоотношение сигнал/шум,/,0 вероятность отсутствия полезного сигнала,1 вероятность присутствия полезного сигнала. 3. Способ по п.1, отличающийся тем, что при обнаружении белого сигнала Гаусса теоретический порог обнаружения рассчитывают путем решения дляследующего уравнения2(01) 22 4. Способ по любому из пунктов 1-3, отличающийся тем, что при обнаружении речевого сигнала, кроме теоретического порога обнаружения используют второй порог решения для учета нестационарного шума,при этом второй порог меньше теоретического порога обнаружения и соответствует шуму, добавляемому к стационарному шуму, сравнивают отношениеэнергий со вторым порогом и производят замену величины средней энергии шума величиной средней энергии поступающего сигнала, если отношениеэнергий меньше второго порога. 3 2994 1 Настоящее изобретение относится к способам обнаружения зашумленного полезного сигнала. Одна из основных проблем обработки сигнала, простая по своей формулировке, но сложная по своему решению, заключается в определении наличия или отсутствия полезного сигнала, погруженного в добавочный шум. Здесь могут быть рассмотрены различные решения. В качестве переменной можно использовать мгновенную амплитуду получаемого или обрабатываемого сигнала по отношению к порогу, определяемому экспериментально. Можно также использовать в качестве переменной энергию сигнала на временном отрезке продолжительностью Т, устанавливая пороговую величину экспериментальным порядком. Подобные установления пороговой величины позволяют сделать первое предположение о наличии или отсутствии сигнала. К тому же они применимы к любому сигналу. Они также дополняются системами подтверждения, определяющими почти достоверные критерии, свойственные типу полезного сигнала, когда природа последнего известна заранее. Подобная дополнительная система широко используется при обработке основного тона речевого сигнала и может заключаться, например, в получении или в оценке минимальной энергии гласной. Наиболее близким по технической сущности к заявляемому является способ, положенный в основу устройства для обнаружения речевых сигналов при наличии шума в канале связи 1. Данный способ обнаружения полезного сигнала в аддитивном шуме, для которого заранее известно соотношение сигнал/ожидаемый шум обрабатываемого сигнала, заключается в измерении параметров шума и обрабатываемого сигнала в цифровой форме по М иточкам соответственно. В нем используются, по существу, 3 разных порога, два из которых регулируются (Т и ), если данный процент примеров поступающих сигналов превышает переменный порог шумав данный период времени. Однако данный способ не может обеспечить возможность подсчета значения энергии поступающих сигналов, что, в свою очередь, не позволяет теоретически подойти к проблеме оценки отношения сигнала к шуму и особенно к проблеме обнаружения при наличии белого шума и сигнала, известного лишь энергией вточках, когда энергия остается относительно стационарной. Задачей изобретения является обеспечение возможности обнаружения зашумленного сигнала с наиболее возможно строгим определением порога обнаружения, который может быть использован также в режиме саморегулирования. Обнаружение сигнала должно производиться при максимальном правдоподобии. Для решения поставленной задачи в способе обнаружения полезного сигнала в белом аддитивном шуме,для которого известно соотношение 0 сигнал/ожидаемый шум обрабатываемого сигнала, заключающийся в измерении параметров шума и обрабатываемого сигнала в цифровой форме по М иточкам соответственно, согласно изобретению измеряют среднюю энергию шума по М точкам при отсутствии полезного сигнала, среднюю энергию обрабатываемого зашумленного сигнала поточкам, подсчитывают отношениеэнергии обрабатываемого зашумленного сигнала к энергии шума, рассчитывают теоретический порогобнаружения, с которым сравнивают отношениеэнергий, и по результатам сравнения судят о наличии либо отсутствии полезного сигнала. При этом теоретический порог обнаружения рассчитывают путем решения дляследующего уравнения 1 2 где- соотношение сигнал/шум,/,0 - вероятность отсутствия полезного сигнала,1 - вероятность присутствия полезного сигнала. В случае обнаружения белого сигнала Гаусса теоретический порог обнаружения рассчитывают путем решения дляследующего уравнения Если обнаруживают речевой сигнал, то для учета нестационарного шума, кроме теоретического порога обнаружения, используют второй порог решения, при этом второй порог меньше теоретического порога обнаружения и соответствует шуму, добавляемому к стационарному шуму, после чего сравнивают отношениеэнергий со вторым порогом и производят замену величины средней энергии шума величиной средней энергии поступающего сигнала, если отношениеэнергий меньше второго порога. Для пояснения сущности изобретения сначала рассмотрено, как проходит теоретически в идеальных условиях обнаружение зашумленного сигнала. Имеется первая информациядля первого временного отрезка 2994 1- целое число 0-1, - полезный сигнал, - шум. Кроме того, имеется информация у с 0-, и М может быть равноили отличаться от него. у это измерение шумана другом временном отрезке, где нет полезного сигнала. Установим 0)222)/ и/. Таким образом, в идеальном и нереальном случае мы получили бы отношение сигнала к шуму 1 И простой критерий обнаружения был бы 1 наличие полезного сигнала,1 отсутствие полезного сигнала. В соответствии с настоящим изобретением теоретический порог 1 заменяется порогомподсчитанным способом, приведенным выше, где учитывается тот факт, что сигналы, которыми располагают, не являются вполне эргодическими и чтоиявляются лишь оценками настоящих значений дисперсий 2 и 2 . Для определениядействуют следующим образом. Допускается, что переменныеиявляются случайными и что, следовательно,тоже случайно. Подсчитывается плотность вероятности , которая зависит от отношения сигнала к шуму. Затем, используя принцип максимума правдоподобия, определяется лучшая оценка отношения сигнала к шуму после подсчета переменной . С этой целью измеряют на временном отрезке переменную , упомянутую выше, и измеряют переменную у на другом временном отрезке, где есть уверенность, что там нет полезного сигнала, а лишь только шум (независимый и декоррелированный от (. Чтобы определить плотность случайной переменной(которую можно обозначить как наблюдаемую переменную), действуют следующим образом. Допустим, 1 принадлежит к (112), а 2 принадлежит к(2 22) две случайных гауссовых независимых переменных, для которых вероятностиХ 10 иХ 20 оказываются практически равными нулю. Установим 1/2, 212/22, 2/2. Плотность вероятностиот Х составит 2 2(2 )1 / 2 то имеем РХ, выражение, в которомобозначает характеристическую функцию нормализованной гауссовой переменной. Теперь допускаем, что сигналы ,и у - это белые гауссовы сигналы, направленные к центру. Установим 22 222. Последний член имеет те же характеристики, что и вышеназванные сигналы и установим 2222. Поскольку мы определяем 2 и 2, то предполагается, что подсчет плотности и вероятности происходит при известных 2 и 2. Таким образом, плотностьопределяется с учетом 2 и 2. В этом случаеиподчиняются законам -2 и при достаточно большихи М,иаппроксимируются законами Гаусса, практически всегда положительнымипринадлежит к(2 24/), а- к(2 24/М).является, таким образом, отношением двух гауссовых переменных. Можно легко доказать, чтоинезависимы С 12, 1224/, 22, 2224/. Получаем 2/2, 2(/) (2/2)2, (/2)1/2. Итак, 2/21, где 2/2 является отношением сигнала к шуму. Если /, то 1, 2(1)2. Таким образом, что ( 2, 2),(, 2/2). На основании вышеприведенных результатов, касающихся плотности вероятности , определяем вероятность. 2(1) 2 1 / 2 Отсюда вытекает 2 2, (,). Теперь рассмотрим случай какого-то сигналаи белого шума Гаусса. Все также предполагаем, что шумыи у являются белыми шумами Гаусса с 222. Предполагается, что есть какой-то полезный сигнал , независимый от шума. Новая гипотеза, выдвигаемая здесь, заключается в том, чтои х не являются коррелируемыми во временном смысле термина, т. е. Теперь доказывается, чтоможет быть аппроксимировано через 2(1/)0-1 2,через Точно так же, как определено выше, подсчет плотностиосуществляется при известных 2 и 2, здесь подсчет производится при известных 2 и 2. Определяемая плотность выражается через ( 2, 2). При известных 2, 2(1/)0-1 2 Принадлежит к(22(2/)4)принадлежит к(2(2/)4). Таким образом, / приближено отношением двух независимых законов Гаусса. Так какинезависимы, то применяем результат, относящийся к плотности вероятности Х с 122, 12(2/)4, 22, 22(2/)4. Следовательно , 2, (/2)1/2 с / и 2/2. Плотность вероятностипри известных 2 и 2, следовательно, составляет(1) 2,( / 4)23 / 2 так что ( 2, 2), (, 2/2). а основании полученных выше результатов, касающихся плотности вероятности , получаем вероятность 2, 2. Или(1),(,)( / 2)1 / 2 2994 1 Отсюда вытекает, 2, (,). В соответствии с настоящим изобретением обнаружение сигнала производится при максимальном правдоподобии. В случае с обрабатываемыми сигналами плотность вероятности переменной , охватывающей энергию полезного сигнала и шума, выражается функцией формы , (, ), гдеобозначает отношение сигнала к шуму. Следовательно, эта вероятность зависит от отношения сигнала к шуму. Также правило решения может быть применимо лишь к отношению сигнала к ожидаемому шуму. Таким образом, 0 выражает это отношение. Предполагается, что вероятность отсутствиясоставляет 0 и что вероятность присутствиясоставляет 1. Поскольку плотность вероятности ,(,) известна, то правило оптимального решения определяется общей теорией обнаружения и выражается через 1,(, 0 )1 1, 0,(,0) 1, (, 0 )1 0.0,(,0) Это правило решения может быть также выражено в виде (0) и (1). Теперь следует определить и решить уравнение 1,(,0)-1,(,0)-1(0/1)0. Теперь доказываем, что вероятность ошибки составляет 01-(,(,01(,(,0. Теперь рассмотрим случай обнаружения белого сигнала Гаусса в белом шуме Гаусса. Допустим, что ,и у являются белыми гауссовыми сигналами, направленными к центру. 0 является отношением сигнала к ожидаемому шуму,/. Вероятность отсутствиясоставляет 0, а вероятность присутствиясоставляет 1. Тогда правило решения выглядит следующим образом Решение 1, когда Порог определяется равенством (вместо неравенства) между членами двух выражений. Правило решения может быть также выражено в форме-1 1,34 0 1,41 1 1,50 2 1,68 Вероятность ошибки составляет 01-(,(,01(,(,0 с(1).,(,)( / 2)1 / 2 2(1) 2 1 / 2 Здесь приведены некоторые значения Ре в зависимости от 0. 1 и 0 считаются равными 0,5. 0 ве 2994 1 В примере моделирования был порожден белый шумы Гаусса с дисперсией устройства. На каждый кадр из 128 точек (М 128) решили не без некоторого риска генерировать добавочный шум , выражающий отношение сигнала к шуму, определенному заранее. Вероятность появления и отсутствия (0 и 1) равна 0,5. Был генерирован второй белый шум Гаусса с дисперсией устройства, что позволило подсчитать случайную переменную . Для каждого кадра подсчитали . Затем применили правило решения и подсчитали количество ошибок. 0 вКоличество ошибок на 1000 операций-1 43 0 18 1 10 2 2 Эти результаты подтверждают теоретические расчеты. Теперь рассмотрим случай какого-то сигналаи белого шума Гаусса. Предполагается, чтои у - белые шум Гаусса при 222. Имеется какой-то полезный сигнал , независимый от шума. 0 является отношением сигнала к ожидаемому шуму,/. Вероятность отсутствиясоставляет 0, а вероятность присутствиясоставляет 1. Решение 1, когда(01)2(1) 2 Правило решения может быть также выражено в форме-1 1,38 0 1,48 1 1,60 2 1,76 Вероятность ошибки составляет 01-(,(,01(,(,0 с(1).,(,)( / 2)1 / 221 / 2 Здесь мы приводим некоторые значения Ре в зависимости от 0. 1 и 0 считаются равными 0,5. 1 В примере моделирования для каждого кадра из 128 точек (М 128) было решено не без некоторого риска добавить , который представляет здесь синусоиду, выражающую отношение сигнала к шуму, определенному заранее. Вероятность появления и отсутствия (1 и 0) равна 0,5. Был генерирован второй белый шум Гаусса с дисперсией устройства, что позволило подсчитать случайную переменную . Для каждого кадра подсчитали . Затем применили правило решения, упомянутое выше, и подсчитали количество ошибок. Количество ошибок на 1000 операций 70 37 12 6 3 Эти результаты подтверждают теоретические расчеты. Предыдущие результаты, являясь очень общими, позволяют осуществить обнаружение сигналов, утонувших в добавочном шуме, даже если отношение сигнала к шуму слишком мало, около 0 дБ. Ниже описана область применения, в которой этот вид обнаружения может оказаться очень полезным. Представленные алгоритмы используются для речи, рассматриваемой как предсистема обнаружения речевой деятельности. Выбор порога обнаружения зависит от контекста. В том, что касается используемых аудио полос, то предварительная характеристика шума в речи, выполненная с помощью измерений, основанных на оценке по максимуму правдоподобия, показывает, что обнаруживаемый речевой сигнал представляет собой отношение сигнала к шуму по крайней мере 6 дБ. С другой стороны, в системе обработки используются полосы сигнала в 128 точек при частоте выборки 10 кГц. Переменныеиоцениваются по 128 точкам, так что М 128. На основании вышеизложенного определяется теоретический порог обнаружения -3. Однако этого единственного порога недостаточно. В действительности, если шум относительно стационарен, то в нем есть и нестационарности, которые следует учитывать для обновления переменной , что позволяет лишь частично использовать алгоритм. Следовательно, необходимо введение второго порога, который позволит решить, следует или нет обновлять переменную . Второй порог устанавливается в 1,25, что соответствует дополнительному шуму, налагающемуся на стационарный, с отношением сигнала к шуму - 2 дБ. Правило решения будет следующим Если 1,25 В таком случае обрабатываемый кадр состоит из того же шума, что и кадр-эталон. Переменнаязаменяется значением энергии обрабатываемого кадра. Следует отметить, что поскольку решение заключается в подходе к обрабатываемому кадру как к представительному шуму, то можно обновить переменную , определив среднюю бывшего значенияи энергии исследуемого кадра. Это приведет к изменению значения М (количество точек, по которым оценивается ),но подобная операция может отрицательно сказаться на благоприятном использовании алгоритма. Если 1,253 Кадр рассматривается как содержащий нестационарность шума при отсутствии речевого сигнала. Если 3 Это кадр с речевым сигналом. Опыты на образцах зашумленных сигналов подтвердили это обнаружение. Однако напомним, что это обнаружение речевого сигнала может быть улучшено путем использования собственных критериев речевого сигнала, таких как подсчет основного тона речевого сигнала. Предлагаемый здесь алгоритм касается исследования некоторых примеров сигналов. Очевидно, что для других сигналов речи, представляющих различные отношения сигнала к шуму, необходимо осуществить новый отбор порогов. Обычно предпочитают использовать два порога. Использование этого алгоритма позволяет создать надежные справочные файлы для системы обнаружения речевого сигнала. В таком случае является необходимой точная сегментация сигнала. В одном из исследований использовали чередование с микрофоном (включение и отключение), что позволило произвести грубую сегментацию речевого сигнала. Предыдущий алгоритм был использован для совершенствования этого чередования. Первый прогон алгоритма позволил уточнить начало сигнала. Второй прогон состоял в чтении речевого сигнала наоборот, т. е. от выключения микрофона к его включению. Благодаря этому можно было установить конец сигнала. Подобное использование алгоритма является необходимым, так как обнаружение сигнала в этом случае является достаточно точным, чтобы обнаружить наличие пауз (молчаний) внутри слов, что отрицательно влияет на сегментацию в ходе исследований. Таким же способом можно сегментировать речевые файлы, на которых проводится исследование. 2994 1 Однако, этот алгоритм не является каузальным, что отрицательно сказывается на его использовании в реальное время. Возникает необходимость дополнить алгоритм подсчетом, свойственным обработке речи. Таким образом доказано существование оптимальных порогов обнаружения, что позволяет теоретически подойти к проблеме оценки отношения сигнала к шуму и особенно к проблеме обнаружения при наличии белого шума и сигнала, известного лишь энергией вточках, когда энергия остается относительно стационарной. Государственный патентный комитет Республики Беларусь. 220072, г. Минск, проспект Ф. Скорины, 66.
МПК / Метки
МПК: G10L 3/00
Метки: обнаружения, аддитивном, сигнала, полезного, белом, способ, шуме
Код ссылки
<a href="https://by.patents.su/8-2994-sposob-obnaruzheniya-poleznogo-signala-v-belom-additivnom-shume.html" rel="bookmark" title="База патентов Беларуси">Способ обнаружения полезного сигнала в белом аддитивном шуме</a>
Способ обнаружения и распознавания радиолокационных объектов
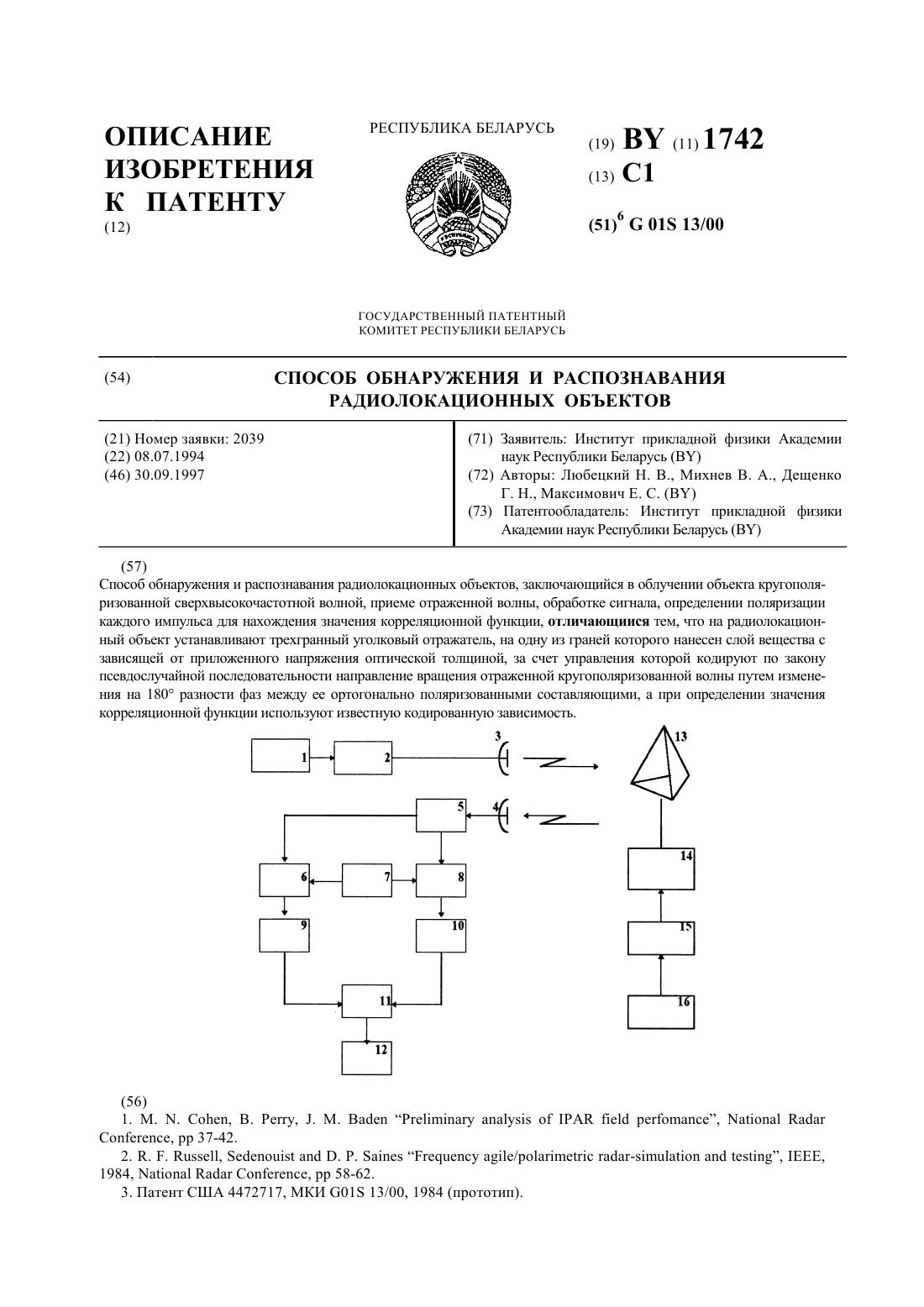
Номер патента: 1742
Опубликовано: 30.09.1997
Авторы: Михнев Валерий Александрович, Максимович Елена Степановна, Дещенко Геннадий Николаевич, Любецкий Николай Васильевич
МПК: G01S 13/00
Метки: объектов, распознавания, радиолокационных, способ, обнаружения
Текст:
...которой кодируют по закону псевдослучайной последовательности направление вращения отраженной кругополяризованной волны путем изменения на 180 разности фаз между ее ортогонально поляризованными составляющими, непрерывно определяют поляризацию отраженной волны и находят значение взаимнокорреляционной функции по известной кодированной зависимости. Сущность предложенного способа основывается на следующих положениях. Для повышения дальности и...
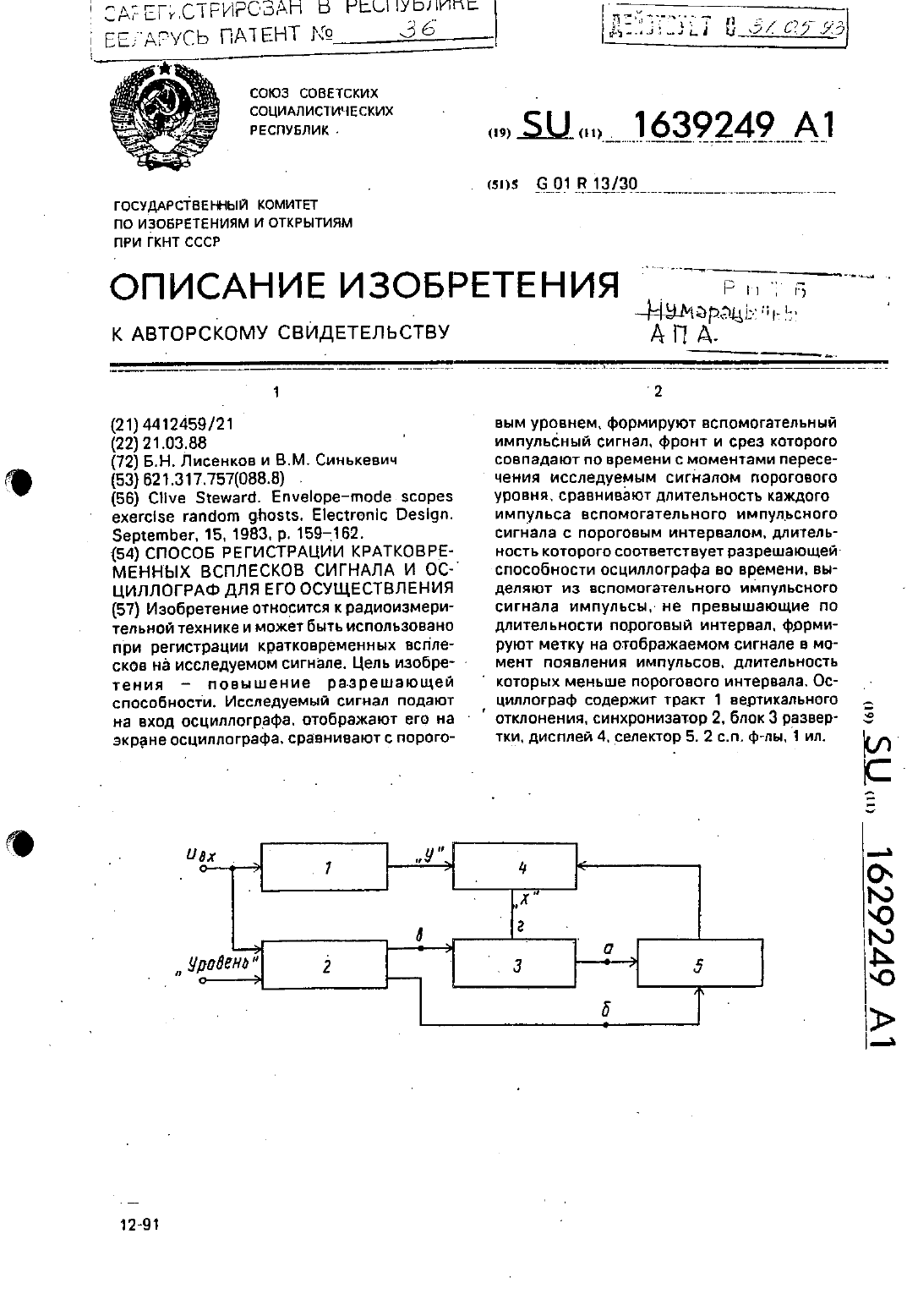
Способ регистрации кратковременных всплесков сигнала и осциллограф для его осуществления
Номер патента: 36
Опубликовано: 30.05.1994
Авторы: Синькевич Валентин Максимович, Лисенков Борис Николаевич
МПК: G01R 13/20
Метки: всплесков, осуществления, осциллограф, регистрации, способ, сигнала, кратковременных
Текст:
...импульсного сигнала с пороговым интервалом селектор 5 ВЫДВЛЯЕТ те ИМПУЛЬСЫ, ДЛИТЕЛЬНОСТЬ КОТОрых не превышает пороговый интервал. То есть, селектор 5 выделяет из входного сигналаттакие его изменения (всплески), длительность которых меньше разрешающей способности осциллографа по времени. Изображениезтих всплесков на экране дисплея в том же временном масштабе, что и изображение исследуемого участка входного сигнала. не может быть...
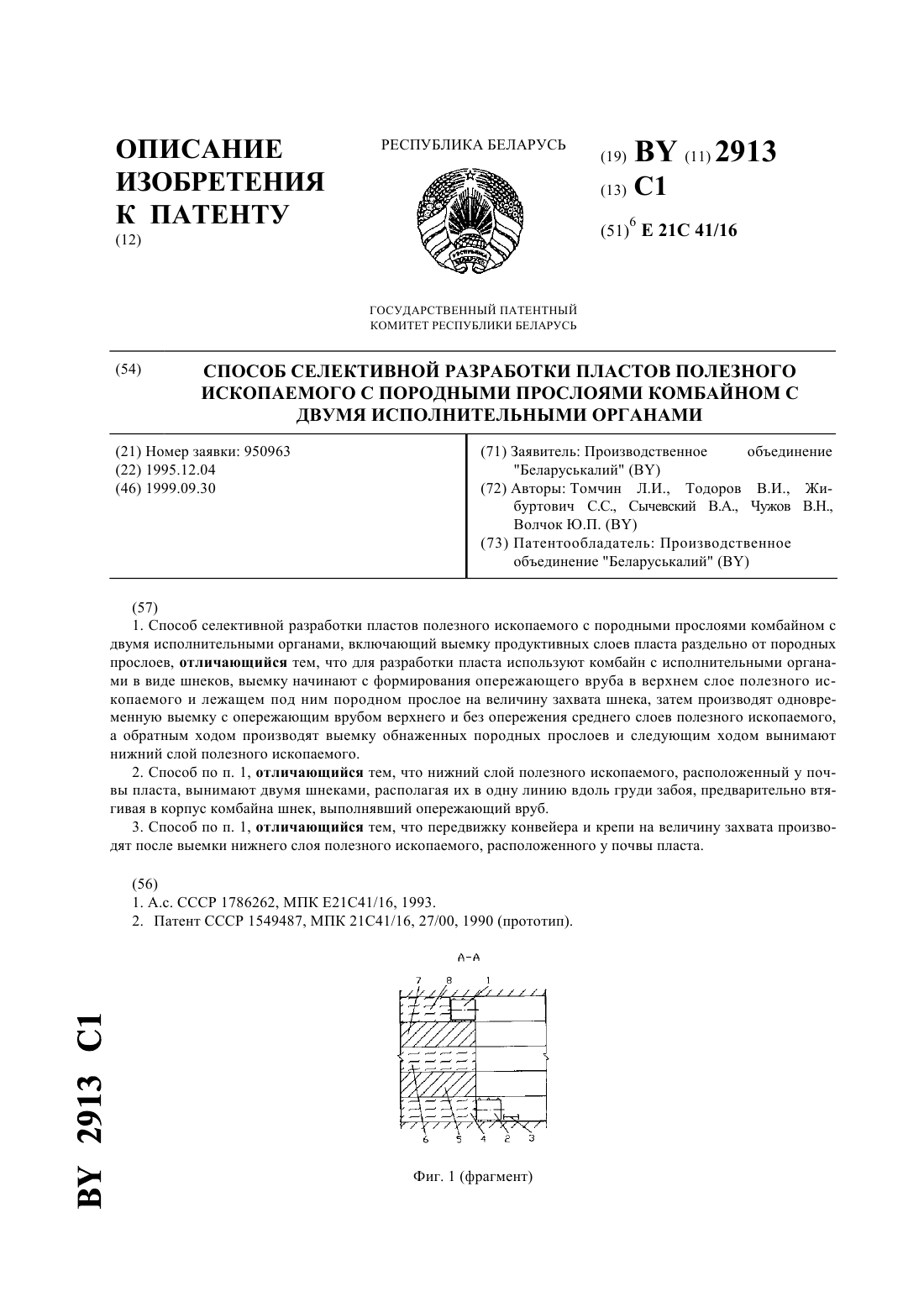
Способ селективной разработки пластов полезного ископаемого с породными прослоями комбайном с двумя исполнительными органами
Номер патента: 2913
Опубликовано: 30.09.1999
Авторы: Сычевский Владимир Алексеевич, Жибуртович Сергей Сергеевич, Томчин Лазарь Ильич, Волчок Юрий Петрович, Чужов Василий Николаевич, Тодоров Владимир Иванович
МПК: E21C 41/16
Метки: пластов, способ, разработки, прослоями, породными, полезного, селективной, комбайном, двумя, исполнительными, ископаемого, органами
Текст:
...при выполнении концевых операций и подготовке забоя, где производится совместная выемка, а также разубоживание руды пустой породой, которая остается на призабойной дорожке между конвейером и забоем после ее погрузки. Задачей настоящего изобретения является повышение эффективности селективной выемки полезного ископаемого с прослоями пустой породы за счет снижения разубоживания добываемой руды пустой породой минимум в два раза, повышения...
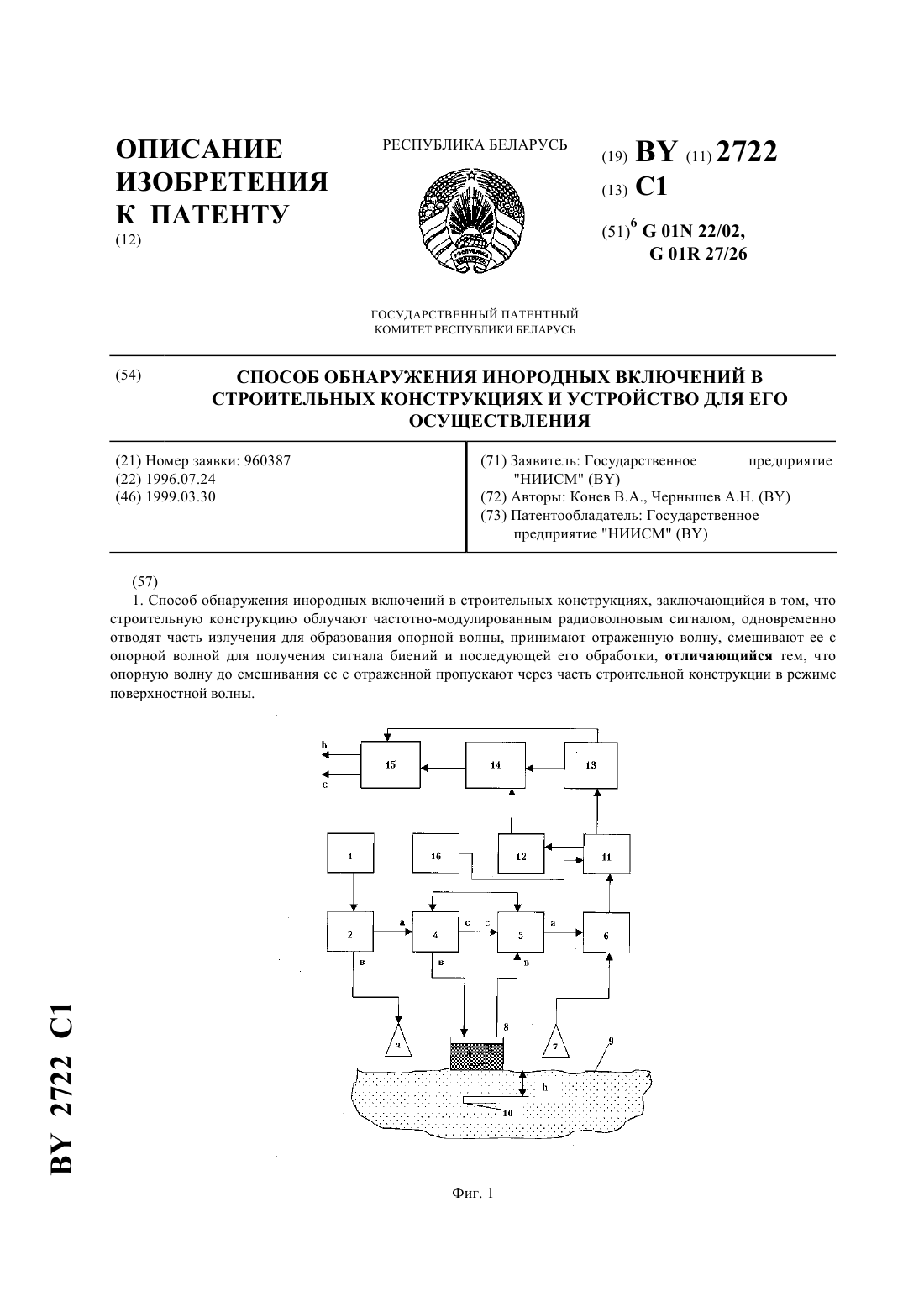
Способ обнаружения инородных включений в строительных конструкциях и устройство для его осуществления
Номер патента: 2722
Опубликовано: 30.03.1999
Авторы: Чернышев Александр Николаевич, Конев Владимир Афанасьевич
МПК: G01N 22/02, G01R 27/26
Метки: включений, обнаружения, способ, устройство, инородных, осуществления, строительных, конструкциях
Текст:
...конструкции, в режиме поверхностной волны. Устройство, реализующее данный способ, включает в себя последовательно соединенные генератор частотно - модулированных радиоволновых сигналов, направленный ответвитель и подключенную к его первому выходу передающую антенну, приемную антенну, соединенную с первым входом балансного смесителя,измеритель частоты, блок обработки и блок управления и синхронизации, дополнительно содержит первый и второй...
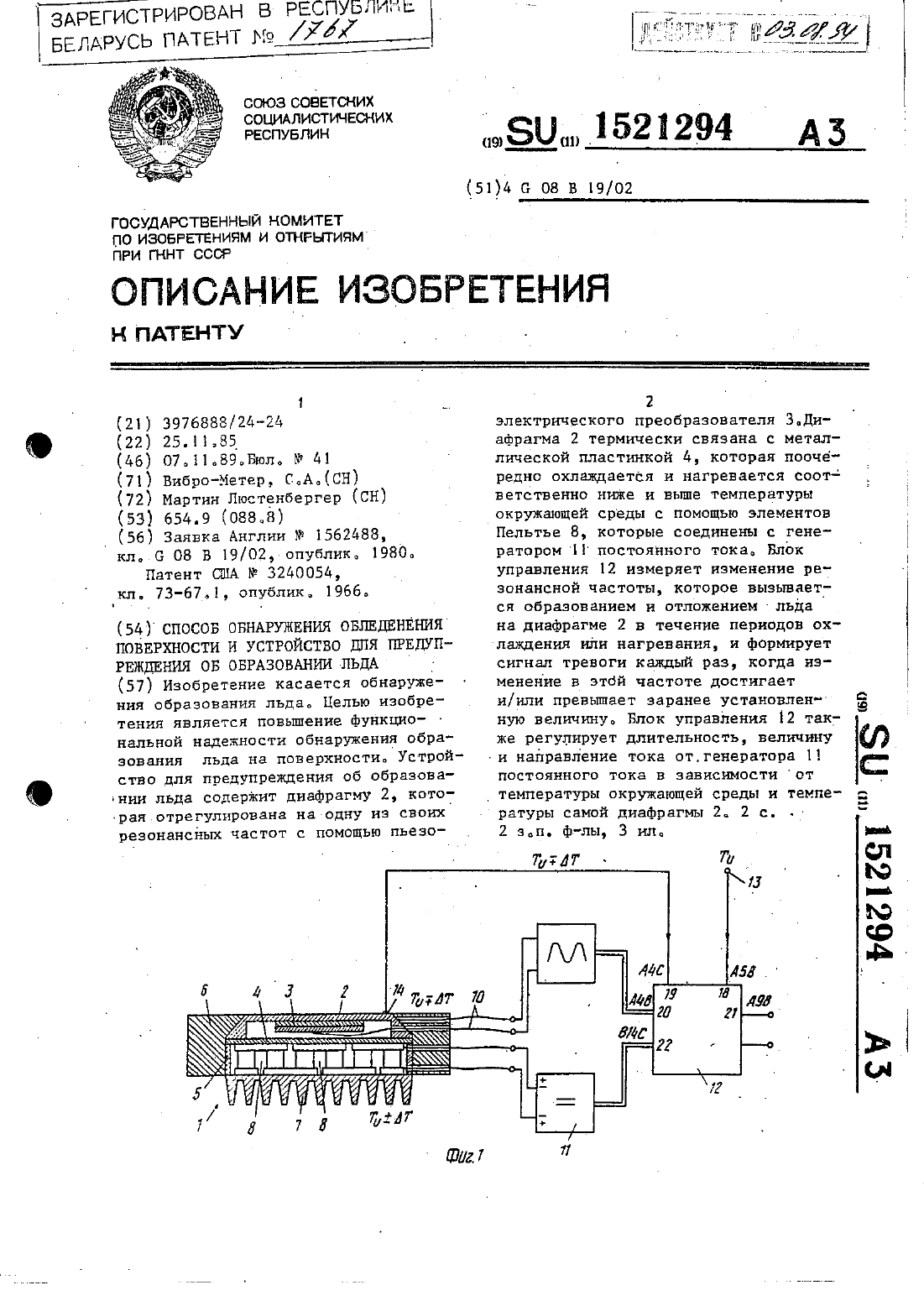
Способ обнаружения обледенения поверхности и устройство для предепреждения об образовании льда
Номер патента: 1767
Опубликовано: 30.09.1997
Автор: Мартин Люстенбергер
МПК: G08B 19/02
Метки: льда, обнаружения, устройство, образовании, способ, обледенения, поверхности, предепреждения
Текст:
...направления потока электрического тока генератора 1 постоянного тока элементЫ.8 Пельтье охлаждают диафрагму 2 на несколько градусов ние температуры окружающей среды Тп, а если температура окружающей среды находится около точки замерзания, тогда на диафрагме 2 можетобразоваться слой льда, который повышает или поииает частоту автогенератора 9, По истечении какого-то периода времени полярность направления потока электрического тока...
Предыдущий патент: Водопроводный смеситель (варианты)
Следующий патент: Способ выделения фактора VIII из других белков в плазме крови
Случайный патент: Роторная жатка для уборки грубостебельных культур