Электростатический миниманипулятор
Номер патента: U 6719
Опубликовано: 30.10.2010
Авторы: Ефремов Георгий Игнатьевич, Мухуров Николай Иванович

Текст
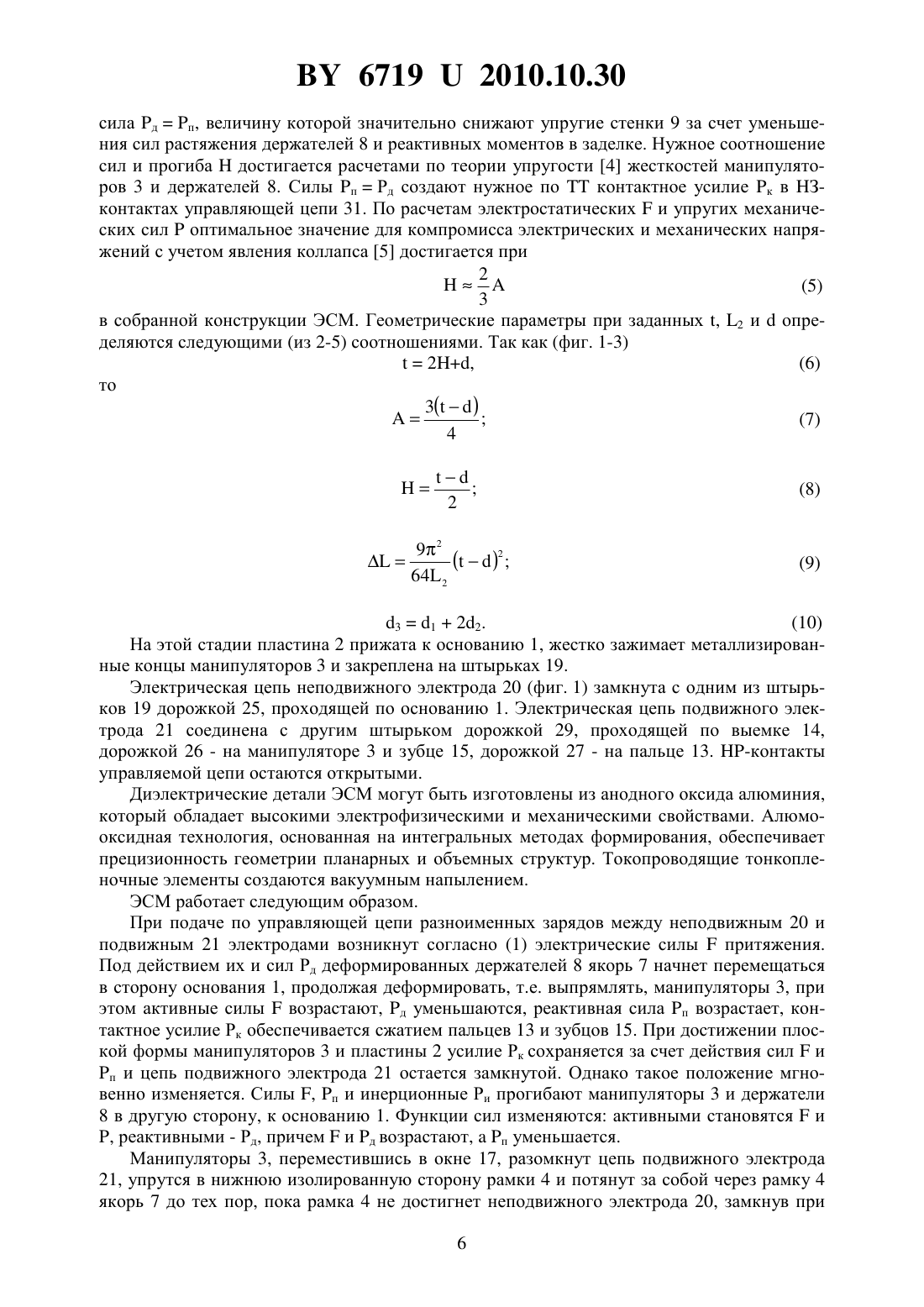
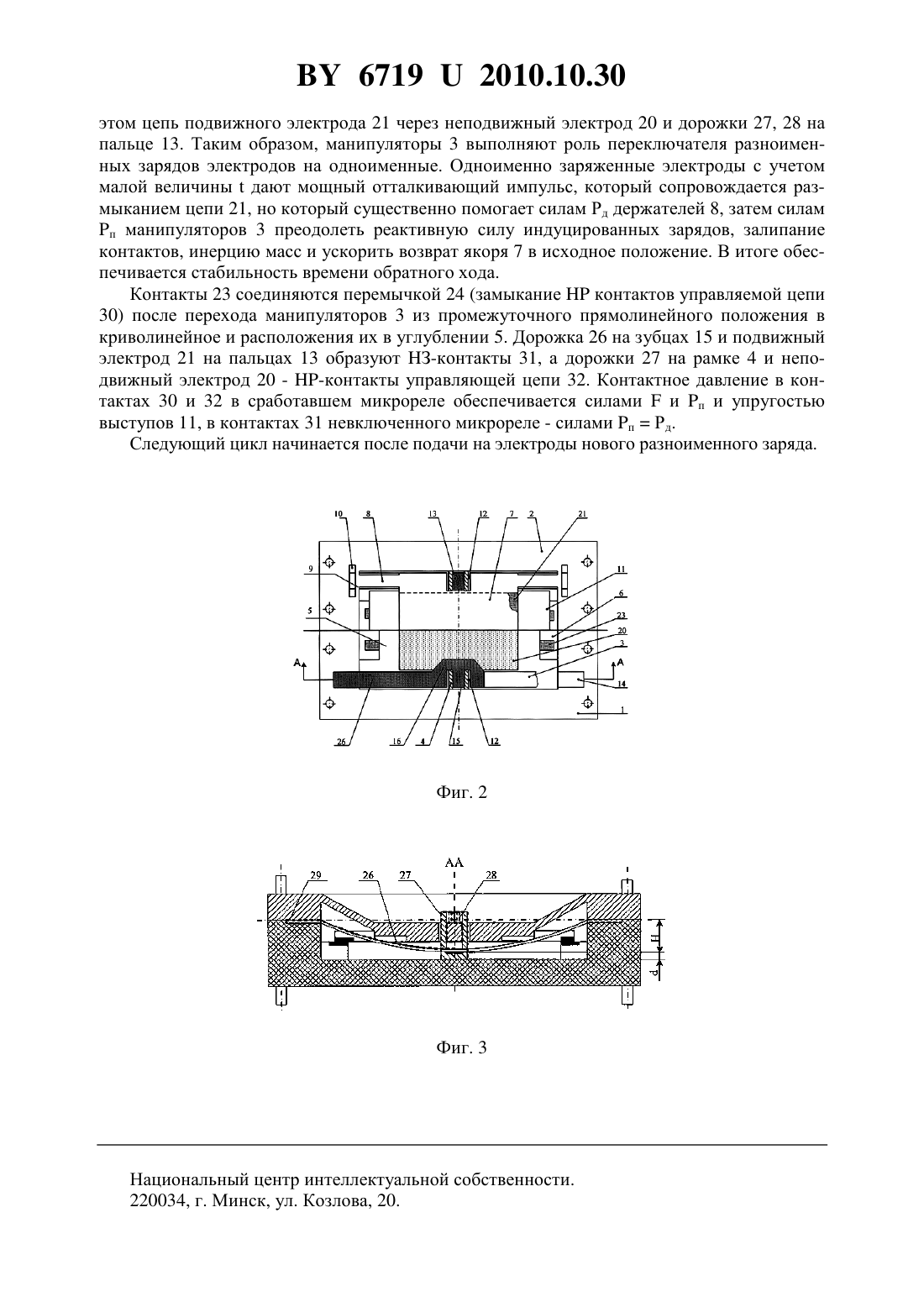
(51) МПК (2009) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Государственное научное учреждение Институт физики имени Б.И.Степанова Национальной академии наук Беларуси(72) Авторы Мухуров Николай Иванович Ефремов Георгий Игнатьевич(73) Патентообладатель Государственное научное учреждение Институт физики имени Б.И.Степанова Национальной академии наук Беларуси(57) 1. Электростатический мини-манипулятор, содержащий соединенные между собой токопроводящими штырьками диэлектрические прямоугольные жесткие основание с углублением 1 и пластину с якорем толщиной 1 и упругими держателями, расположенными на боковых сторонах якоря параллельно его длинной оси, неподвижный на дне углубления и подвижный на якоре электроды управляющей цепи, образующие электростатический актюатор с межэлектродным расстоянием , нормально разомкнутые контакты в управляемой цепи, токопроводящие дорожки, отличающийся тем, что между основанием и якорем под держателями размещены два упругих манипулятора толщиной 2 и длиной 1, прогнутые в сторону якоря, сместившие якорь и изогнувшие держатели на величину , причем концы манипуляторов упираются в торцы выемок, выполненных на верхней плоскости основания глубиной 2 и с расстоянием между противоположными торцами выемок 2, при этом 1 - 20, а в средней части манипуляторов и якоря выполнены одинаковые щели, образующие на манипуляторах зубцы, на якоре - пальцы одинаковой ширины, на которые надета рамка со стенками толщинойи окном высотой 3, при этом соотношения геометрических параметров при заданныхисоставляют 312 2 ,где- амплитуда свободно прогнутых по синусоиде манипуляторов при их осевом сжатии,при этом токопроводящие дорожки нанесены в углублении, выемках, на одной половине верхней плоскости манипуляторов и зубцов, на всех сторонах пальцев, на всех поверхностях одной горизонтальной стороны рамки и на трех внешних боковых ее сторонах, нормально разомкнутые контакты управляемой цепи содержат перемычки на выступах якоря,выполненных упругими и размещенных между держателями, и контакты на ступеньках в углублении, расположенных под выступами, нормально разомкнутые контакты управляющей цепи состоят из дорожки на боковой нижней стороне рамки и неподвижного электрода, нормально замкнутые контакты управляющей цепи сформированы из дорожек на зубцах и пальцах. 2. Электростатический мини-манипулятор по п. 1, отличающийся тем, что периферийные концы держателей соединены с гибкими упругими стенками, отделенными от пластины сквозными пазами. 3. Электростатический мини-манипулятор по п. 1, отличающийся тем, что в плоскости манипуляторов напротив щелей и зубцов размещены выступы с токопроводящей дорожкой на верхней стороне.(56) 1. Патент США 160549. 2. Кухлинг Х. Справочник по физике. - М. Мир, 1983. - С. 519. 3. Патент РБ 9096, П 701 59/00. 4. Писаренко Г.С., Агарев В.А., Квитко А.Л. и др. Сопротивление материалов. - Киев Вища школа, 1973. - 667 с. 5. Мухуров Н.И., Ефремов Г.И. Концепция построения электростатических микропереключателей.МНТК. - М. ОАО ЦНИТИ, Техномаш, 2008. - С. 212-215. Полезная модель относится к электротехнике, микроэлектронике, микромеханике и может быть использована в системах управления, коммутирования, связи, регулировки. Известно(микроэлектромеханическое реле с объединенным электростатическим и электромагнитным приводом) 1. Микрореле содержит диэлектрическую подложку прямоугольной формы, в которой по продольной оси выполнена канавка с плоским дном. На ее боковых сторонах размещены выступы. В канавке и на обоих выступах нанесен электропроводящий слой, из которого посредством локального травления сформированы в средней части подложки неподвижный электрод электростатического актюатора и в нем два раздельных изолированных контакта управляемой цепи, а за его пределами - токопроводящие дорожки. Над подложкой расположена диэлектрическая перфорированная пластина. В ее центре размещен якорь, соединенный двумя симметричными меандрообразными упругими держателями с площадками на обоих концах пластины, которые жестко закреплены на концах выступов подложки. Конструкция пластины не обладает формоустойчивостью из-за малой жесткости держателей. На пластине сформированы токопроводящие элементы на 2 67192010.10.30 якоре снизу - подвижный электрод с пленочными выводами и изолированная от него перемычка управляемой цепи, размещенная в контуре электрода, сверху - токовая катушка. С внешних боковых сторон напротив якоря расположены северный и южный полюса постоянного магнита. Неподвижный и подвижный электроды образуют электростатический привод (ЭСП), магнит с токовой катушкой - электромагнитный привод (ЭМП). В рабочем цикле ЭМП предварительно приближает подвижный электрод к неподвижному, окончательное перемещение и замыкание контактов управляемой цепи перемычкой осуществляет ЭСП. Такая последовательность несколько снижает требующееся напряжение , но оно остается высоким, т.к. электроды имеют малую площадьиз-за размещения на этих же поверхностях подвижной перемычки, контактов и их выводов, а электростатическая сила 2 должна оставаться неизменной, чтобы преодолеть силусопротивления держателей,деформируемых перемещающимся якорем 20,(1) 22 где 0 - электрическая постоянная- межэлектродное расстояние- смещение якоря, прогиб держателей. Возврат якоря в исходное положение осуществляется реактивными силами деформированных держателей, которые практически всегда в состоянии преодолеть реактивные силы индуцированных зарядов, залипание контактов, инерционность масс, что в итоге на неопределенное время задерживает отключение микрореле. МЭМС микрореле с объединенными электромагнитным и электростатическим приводами не может обеспечить надежность цикла срабатывания, т.е. имеет ограниченные функциональные возможности. Наиболее близким по технической сущности является электростатическое микрореле 3, состоящее из диэлектрических прямоугольных основания, пластины и фиксатора, соединенных штырьками. На длинных сторонах основания выполнены попарно 4 опоры одинаковой высоты, образуя углубление, равное расчетному межэлектродному расстоянию 0. В пластине сформированы жесткий якорь и четыре жесткие опорные площадки,соединенные с якорем упругими держателями, размещенными по боковым сторонам якоря вдоль оси пластины. Опорные площадки расположены соответственно опорам на основании. Держатели от всех опорных площадок направлены в одну сторону, чтобы избежать их растяжения и снизить реактивную силу. Над пластиной расположен фиксатор, на его внутренней стороне выполнены упоры высотой (0,55-0,80)0 с металлизированными торцами. На верхней плоскости пластины под упорами сформированы контактные площадки. На внутренней поверхности якоря и в углублении размещены соответственно подвижный и неподвижный электроды, образующие электростатический актюатор. На этих же поверхностях расположены контакты и перемычки. В собранном микрореле якорь упорами фиксатора смещен до межэлектродного расстояния(0,45-0,20)0, контакты на якоре и перемычки образуют нормально разомкнутыеконтакты, а металлизация торцов и контактные площадки - нормально замкнутые (З) контакты управляемой цепи, причем контактное усилие к в последних равно реактивной силе 1 механически прогнутых держателей. Микрореле срабатывает при подаче на электроды разноименных зарядов по управляющей цепи. Под действием электростатических сил(1) якорь перемещается в конечное положение, дополнительно прогибая держатели и увеличивая их реактивную силу 2, а также размыкая З- и замыкая -контакты в управляемой цепи. Для последовательного преодоления сил 1, 2 при включении требуется значительное рабочее напряжение(1), которое инициирует возникновение паразитных емкостей с реактивными силами п. При отключении сила держателейстановится активной. Она 3 67192010.10.30 должна превысить инерцию подвижных масс, сопротивление сил п, залипание контактов,что на неопределенное время может задержать возврат якоря, т.е. отключение микрореле. Электростатическое микрореле не может обеспечить надежность цикла срабатывания,т.е. имеет ограниченные функциональные возможности. Технической задачей является расширение функциональных возможностей электростатических микрореле за счет создания в момент отключения дополнительно ксилового электрического импульса, возвращающего подвижные элементы в исходное положение. Электростатический мини-манипулятор содержит соединенные между собой токопроводящими штырьками диэлектрические прямоугольные жесткие основание с углублением 1 и пластину толщиной 1 с якорем и упругими держателями, расположенными на боковых сторонах якоря параллельно его длинной оси, неподвижный на дне углубления и подвижный на якоре электроды управляющей цепи, образующие электростатический актюатор с межэлектродным расстоянием , нормально разомкнутые контакты в управляемой цепи, токопроводящие дорожки. Между основанием и якорем под держателями размещены два упругих манипулятора толщиной 2 и длиной 1, прогнутые в сторону якоря,сместившие якорь и изогнувшие держатели на величину . Причем концы манипуляторов упираются в торцы выемок, выполненных на верхней плоскости основания глубиной 2 и с расстоянием между противоположными торцами выемок 2, при этом 1 - 20, а в средней части манипуляторов и якоря выполнены одинаковые щели, образующие на манипуляторах зубцы, на якоре пальцы одинаковой ширины, на которые надета рамка со стенками толщинойи окном высотой 3, при этом соотношения геометрических параметров при заданныхисоставляют 342641312 2 ,где- амплитуда свободно прогнутых по синусоиде манипуляторов при их осевом сжатии,при этом токопроводящие дорожки нанесены в углублении, выемках, на одной половине верхней плоскости манипуляторов и зубцов, на всех сторонах пальцев, на всех поверхностях одной горизонтальной стороны рамки и на трех внешних боковых ее сторонах, нормально разомкнутые контакты управляемой цепи содержат перемычки на выступах якоря,выполненных упругими и размещенных между держателями, и контакты на ступеньках в углублении, расположенных под выступами, нормально разомкнутые контакты управляющей цепи состоят из дорожки на боковой нижней стороне рамки и неподвижного электрода, нормально замкнутые контакты управляющей цепи сформированы из дорожек на зубцах и пальцах. Периферийные концы держателей соединены с гибкими упругими стенками, отделенными от пластины сквозными пазами, в плоскости манипуляторов напротив щелей и зубцов размещены выступы с токопроводящей дорожкой на верхней стороне. Сущность полезной модели поясняется фиг. 1-3. На фиг. 1 представлено продольное сечение электростатического мини-манипулятора(ЭСМ) по плоскости . На фиг. 2 представлен вид на ЭСМ сверху со снятой половиной пластины. На фиг. 3 представлено продольное сечение ЭСМ по плоскостиво включенном состоянии. 67192010.10.30 Электростатический манипулятор содержит прямоугольные диэлектрические основание 1, пластину 2, два плоских манипулятора 3, две рамки 4. В центральной части верхней поверхности основания 1 выполнено (фиг. 1-2) прямоугольное углубление 5 глубиной 1, в котором на противолежащих коротких сторонах предусмотрены ступеньки 6. Над основанием 1 расположена жесткая пластина 2 толщиной 1, выполненная в виде четырехсторонней рамки. В ее средней части сформирован жесткий якорь 7 толщиной 1 с четырьмя упругими держателями 8, расположенными вдоль двух боковых сторон якоря 7 и направленными попарно к коротким сторонам пластины 2. Концы держателей 8 соединены с тонкими стенками 9, выполняющими роль торсионов. Стенки 9 отделены от коротких сторон пластины 2 сквозными пазами 10. Между держателями 8 на обеих сторонах якоря 7 на его нижней плоскости сформированы упругие выступы 11, ширина которых определяет длину ступенек 6. В середине боковых сторон якоря 7 с держателями 8 выполнены по две поперечные щели 12, образующие пальцы 13. Манипуляторы 3 длиной 1 расположены под держателями 8. Под концами манипуляторов 3 в основании 1 сформированы выемки 14 глубиной, равной толщине 2 манипуляторов 3, одинаковой с ними ширины и с расстоянием 2 между торцевыми стенками противоположных выемок 14, меньшим длины манипуляторов 1 на(2)1 - 20. В середине манипуляторов 3 расположены зубец 15, аналогичный пальцу 13, и поперечные щели 12. С другой стороны в плоскости манипулятора 3 размещены полочки 16,обеспечивающие постоянную жесткость поперечных сечений по длине. Рамки 4 с толщиной стенокнадеты на пальцы 13 и зубцы 15 и соединяют якорь 7 и манипуляторы 3. В них выполнены окна 17 шириной, равной ширине пальцев 13, и высотой 3, равной сумме(3) 312122,где зазор 2 обеспечивает возможность перемещения зубца 15 манипулятора 3 в окне 17. По периферии основания 1 и пластины 2 расположены сквозные соосные отверстия 18,в которые установлены центрирующие и коммутирующие штырьки 19. На противолежащих плоскостях основания 1 и якоря 7 с выступами 11, а также на всей боковой поверхности пальцев 13 сформированы неподвижный 20 и подвижный 21 электроды, образующие электростатический актюатор 22, входящий в управляющую цепь. На ступеньках 6 и выступах 11 расположены соответственно неподвижные контакты 23 и подвижные перемычки 24. Коммутирующие дорожки размещены 25 - на поверхности углубления 5, 26 на концах и половине одной из верхних сторон манипулятора 3 и на той же стороне зубцов 15, располагаемых при металлизации в противоположные стороны, 27 - на внешних боковых сторонах рамок 4, 28 - на всех сторонах верхней горизонтали рамок 4, 29 - на дне выемок 14. Контакты 23 и перемычки 24 образуют -контакты управляемой цепи 30, дорожка 26 и подвижный электрод 21 формируют З-контакт управляющей цепи 31, а неподвижный электрод 20 и дорожка 27 - -контакт управляющей цепи 32. При сборке пластина 2 располагается подвижным электродом 21 вниз. Под ее боковые стороны устанавливаются манипуляторы 3 дорожкой 26 вверх и влево. На совмещенные пальцы 13 и зубцы 15 надеваются рамки 4 дорожкой 28 вверх. Затем металлизированные концы манипуляторов 3 помещаются в выемки 14 до упора в их торцы. Манипуляторы 3 оказываются в изогнутом состоянии, т.к. 12. Разница определяется соотношением 2 2,(4) 4 2 где(согласно теории устойчивости 4) - амплитуда изогнутой по синусоиде оси пружины. Она является функцией задаваемого техническими требованиямимежэлектродного расстояния . При установке пластины 2 на основание 1 якорь 7 нажимает на манипуляторы 3, деформирует их, уменьшая амплитудудо(фиг. 1). Под действием реактивной силы п манипуляторов 3 держатели 8 прогибаются наружу, в них возникает 67192010.10.30 сила дп, величину которой значительно снижают упругие стенки 9 за счет уменьшения сил растяжения держателей 8 и реактивных моментов в заделке. Нужное соотношение сил и прогибадостигается расчетами по теории упругости 4 жесткостей манипуляторов 3 и держателей 8. Силы пРд создают нужное поконтактное усилие к в Зконтактах управляющей цепи 31. По расчетам электростатическихи упругих механических силоптимальное значение для компромисса электрических и механических напряжений с учетом явления коллапса 5 достигается при 2(5) 3 в собранной конструкции ЭСМ. Геометрические параметры при заданных , 2 иопределяются следующими (из 2-5) соотношениями. Так как (фиг. 1-3)2,(6) то 3(10) На этой стадии пластина 2 прижата к основанию 1, жестко зажимает металлизированные концы манипуляторов 3 и закреплена на штырьках 19. Электрическая цепь неподвижного электрода 20 (фиг. 1) замкнута с одним из штырьков 19 дорожкой 25, проходящей по основанию 1. Электрическая цепь подвижного электрода 21 соединена с другим штырьком дорожкой 29, проходящей по выемке 14,дорожкой 26 - на манипуляторе 3 и зубце 15, дорожкой 27 - на пальце 13. -контакты управляемой цепи остаются открытыми. Диэлектрические детали ЭСМ могут быть изготовлены из анодного оксида алюминия,который обладает высокими электрофизическими и механическими свойствами. Алюмооксидная технология, основанная на интегральных методах формирования, обеспечивает прецизионность геометрии планарных и объемных структур. Токопроводящие тонкопленочные элементы создаются вакуумным напылением. ЭСМ работает следующим образом. При подаче по управляющей цепи разноименных зарядов между неподвижным 20 и подвижным 21 электродами возникнут согласно (1) электрические силыпритяжения. Под действием их и сил Рд деформированных держателей 8 якорь 7 начнет перемещаться в сторону основания 1, продолжая деформировать, т.е. выпрямлять, манипуляторы 3, при этом активные силывозрастают, д уменьшаются, реактивная сила п возрастает, контактное усилие Рк обеспечивается сжатием пальцев 13 и зубцов 15. При достижении плоской формы манипуляторов 3 и пластины 2 усилие Рк сохраняется за счет действия сили п и цепь подвижного электрода 21 остается замкнутой. Однако такое положение мгновенно изменяется. Силы , п и инерционные Ри прогибают манипуляторы 3 и держатели 8 в другую сторону, к основанию 1. Функции сил изменяются активными становятсяи, реактивными - Рд, причеми д возрастают,п уменьшается. Манипуляторы 3, переместившись в окне 17, разомкнут цепь подвижного электрода 21, упрутся в нижнюю изолированную сторону рамки 4 и потянут за собой через рамку 4 якорь 7 до тех пор, пока рамка 4 не достигнет неподвижного электрода 20, замкнув при 6 67192010.10.30 этом цепь подвижного электрода 21 через неподвижный электрод 20 и дорожки 27, 28 на пальце 13. Таким образом, манипуляторы 3 выполняют роль переключателя разноименных зарядов электродов на одноименные. Одноименно заряженные электроды с учетом малой величиныдают мощный отталкивающий импульс, который сопровождается размыканием цепи 21, но который существенно помогает силам Рд держателей 8, затем силам п манипуляторов 3 преодолеть реактивную силу индуцированных зарядов, залипание контактов, инерцию масс и ускорить возврат якоря 7 в исходное положение. В итоге обеспечивается стабильность времени обратного хода. Контакты 23 соединяются перемычкой 24 (замыканиеконтактов управляемой цепи 30) после перехода манипуляторов 3 из промежуточного прямолинейного положения в криволинейное и расположения их в углублении 5. Дорожка 26 на зубцах 15 и подвижный электрод 21 на пальцах 13 образуют З-контакты 31, а дорожки 27 на рамке 4 и неподвижный электрод 20 - -контакты управляющей цепи 32. Контактное давление в контактах 30 и 32 в сработавшем микрореле обеспечивается силамии п и упругостью выступов 11, в контактах 31 невключенного микрореле - силами пРд. Следующий цикл начинается после подачи на электроды нового разноименного заряда. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: H01H 59/00
Метки: миниманипулятор, электростатический
Код ссылки
<a href="https://by.patents.su/7-u6719-elektrostaticheskijj-minimanipulyator.html" rel="bookmark" title="База патентов Беларуси">Электростатический миниманипулятор</a>
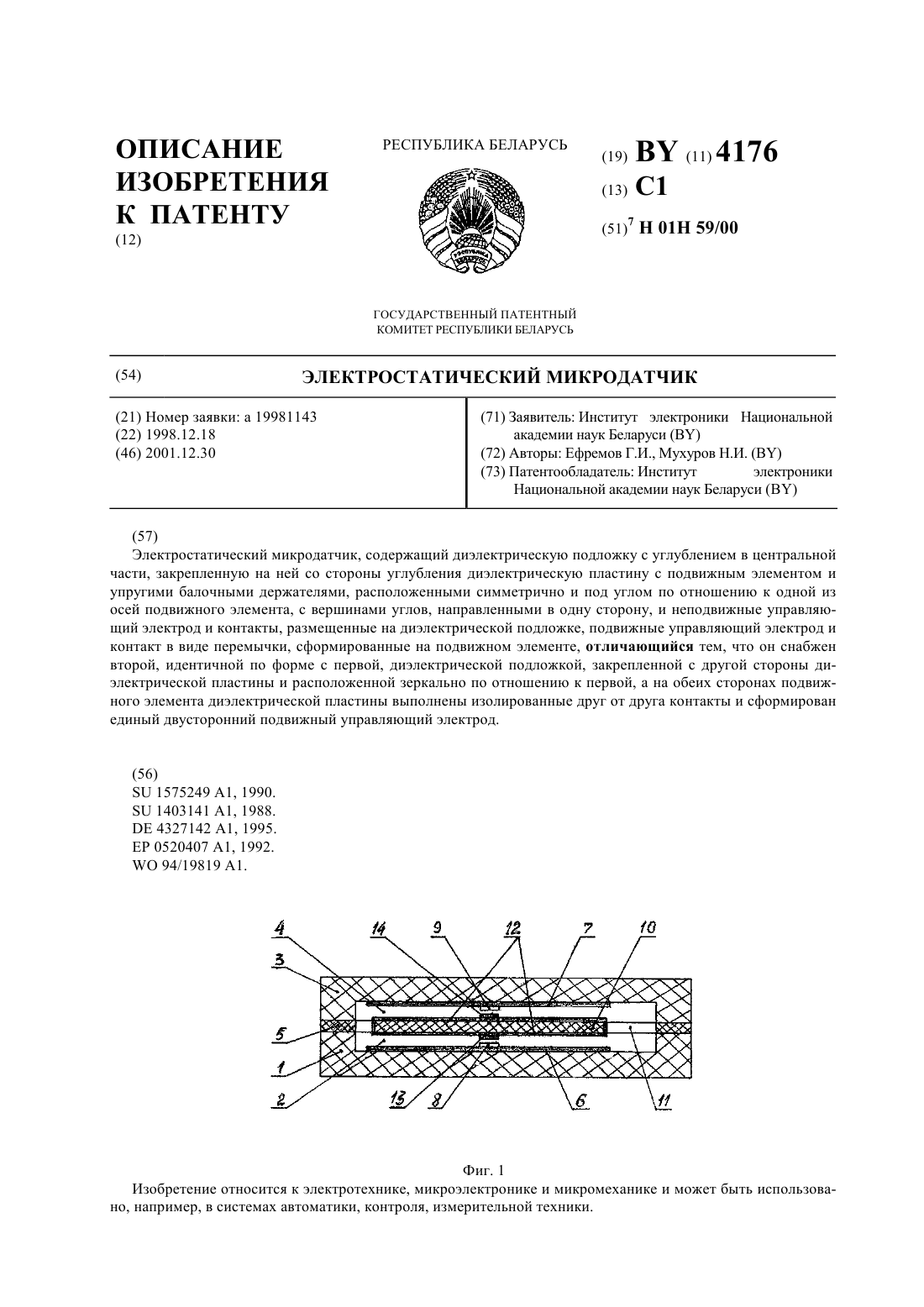
Электростатический микродатчик
Номер патента: 4176
Опубликовано: 30.12.2001
Авторы: Мухуров Николай Иванович, Ефремов Георгий Игнатьевич
МПК: H01H 59/00
Метки: электростатический, микродатчик
Текст:
...ему наряду с выполнением функций порогового датчика быть анализатором знака полярности и величи 2 4176 1 ны наведенных зарядов, что очень важно для определения напряженностей электрических и электростатических полей отдаленных или труднодоступных объектов и их компонентов, в частности элементов космических кораблей, высоковольтных подстанций и т.п. Размещение на обеих сторонах подвижного элемента изолированных друг от друга подвижных...
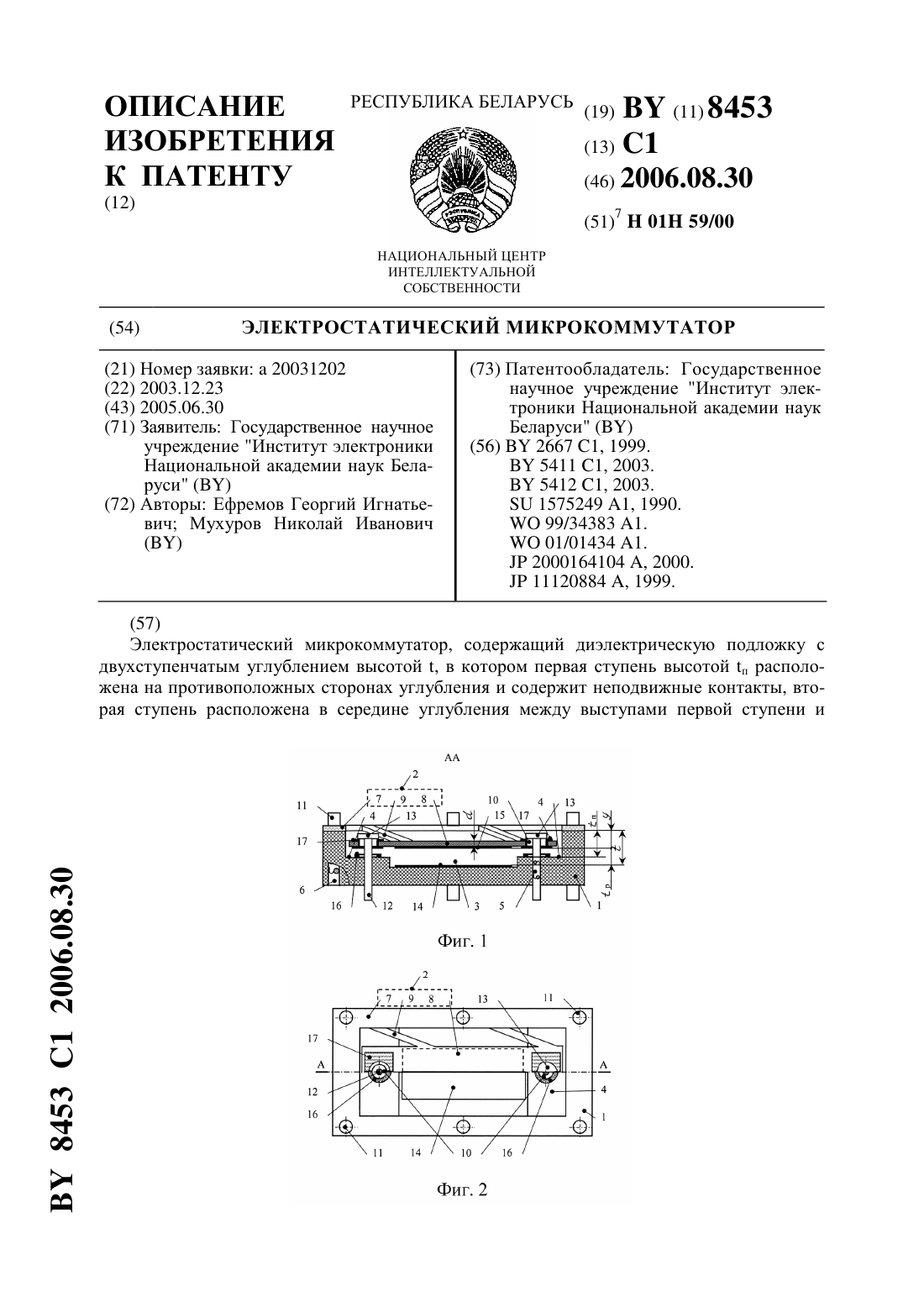
Электростатический микрокоммутатор
Номер патента: 8453
Опубликовано: 30.08.2006
Авторы: Ефремов Георгий Игнатьевич, Мухуров Николай Иванович
МПК: H01H 59/00
Метки: электростатический, микрокоммутатор
Текст:
...так, что подвижный элемент смещен на расстояние от 0,4 до 0,5 и выполнен жестким, а в местах размещения подвижных и неподвижных контактов в подвижном элементе и в первой ступени углубления выполнены соосно между собой отверстия, в которые вставлены цилиндрические токопроводящие штифты с головками, плотно закрепленные в отверстиях первой ступени и входящие с зазором в отверстия подвижного элемента, при этом диаметр головок штифтов больше...
Электростатический микропереключатель
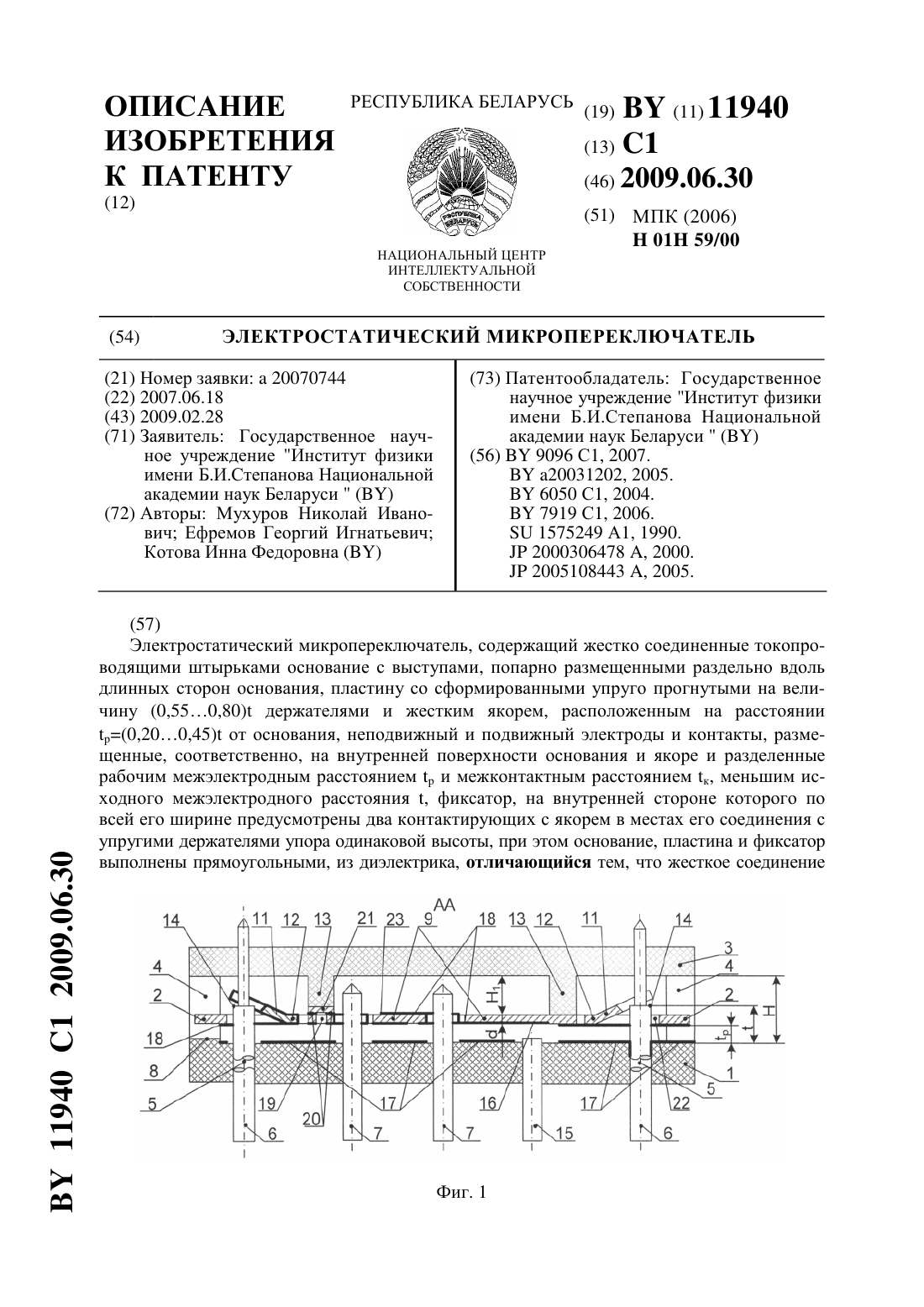
Номер патента: 11940
Опубликовано: 30.06.2009
Авторы: Котова Инна Федоровна, Ефремов Георгий Игнатьевич, Мухуров Николай Иванович
МПК: H01H 59/00
Метки: микропереключатель, электростатический
Текст:
...Н 1 Н- (0,200,45), где Н - высота выступов основания,- толщина пластины. Совокупность указанных признаков обеспечивает расширение коммутационных возможностей за счет переключения управляемых электрических цепей. Сущность изобретения поясняется фиг. 1, 2. На фиг. 1 представлено поперечное сечение электростатического микропереключателя, на котором 1 - основание,2 - пластина,3 - фиксатор,4 - выступ,5 - отверстие,6 - периферийный токопроводящий...
Планарный электростатический микрокоммутатор
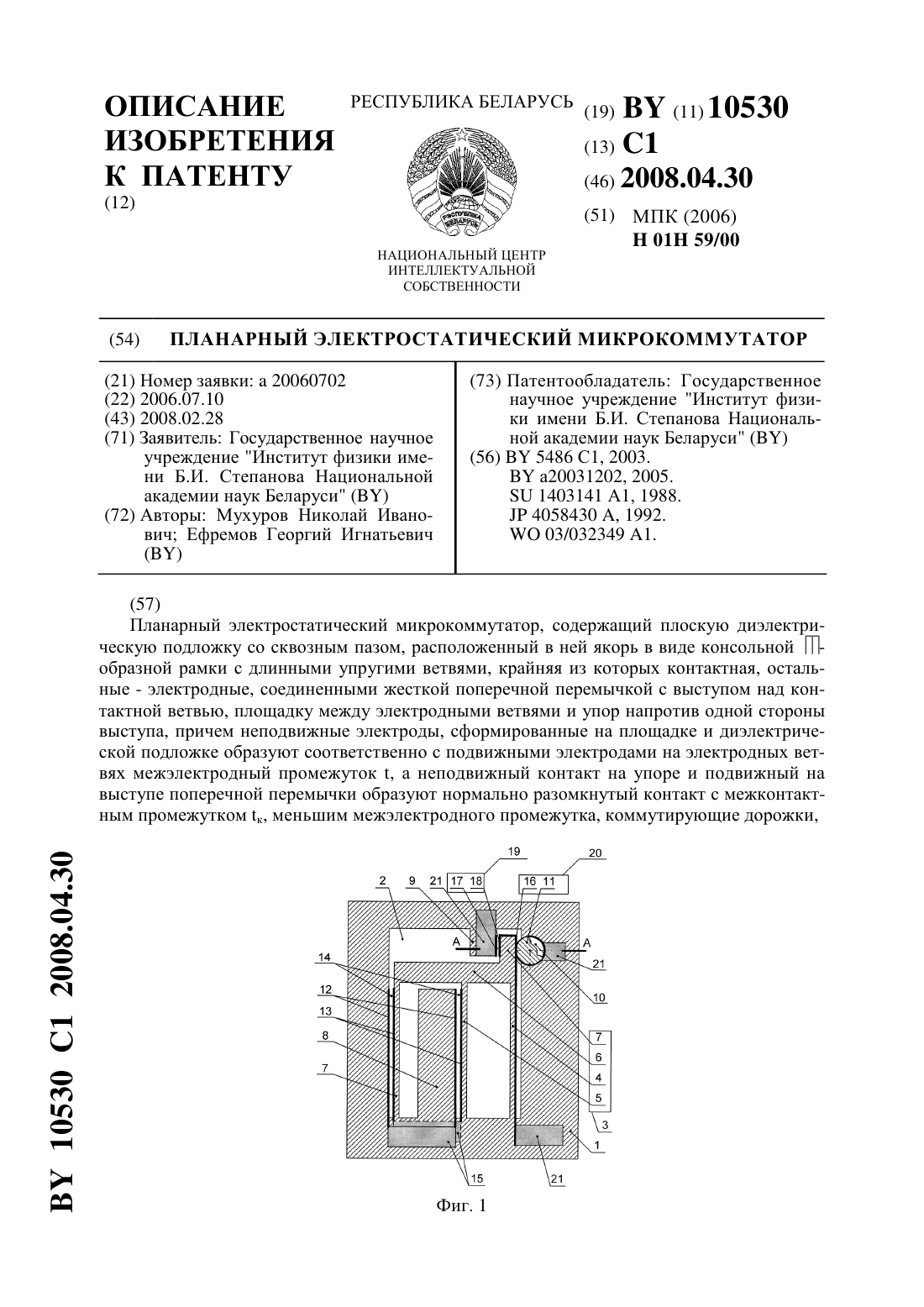
Номер патента: 10530
Опубликовано: 30.04.2008
Авторы: Ефремов Георгий Игнатьевич, Мухуров Николай Иванович
МПК: H01H 59/00
Метки: электростатический, микрокоммутатор, планарный
Текст:
...цепей, на выступе поперечной перемычки сформирован дополнительный подвижный контакт, а напротив другой стороны выступа выполнено цилиндрическое металлизированное отверстие радиусом , электрически соединенное с коммутирующей дорожкой, в которое плотно вставлен диэлектрический металлизированный вкладыш, образующий с дополнительным подвижным контактом нормально замкнутый контакт с соответствующим контактным усилием, при этом расстояниеот...
Электротоковое микрореле
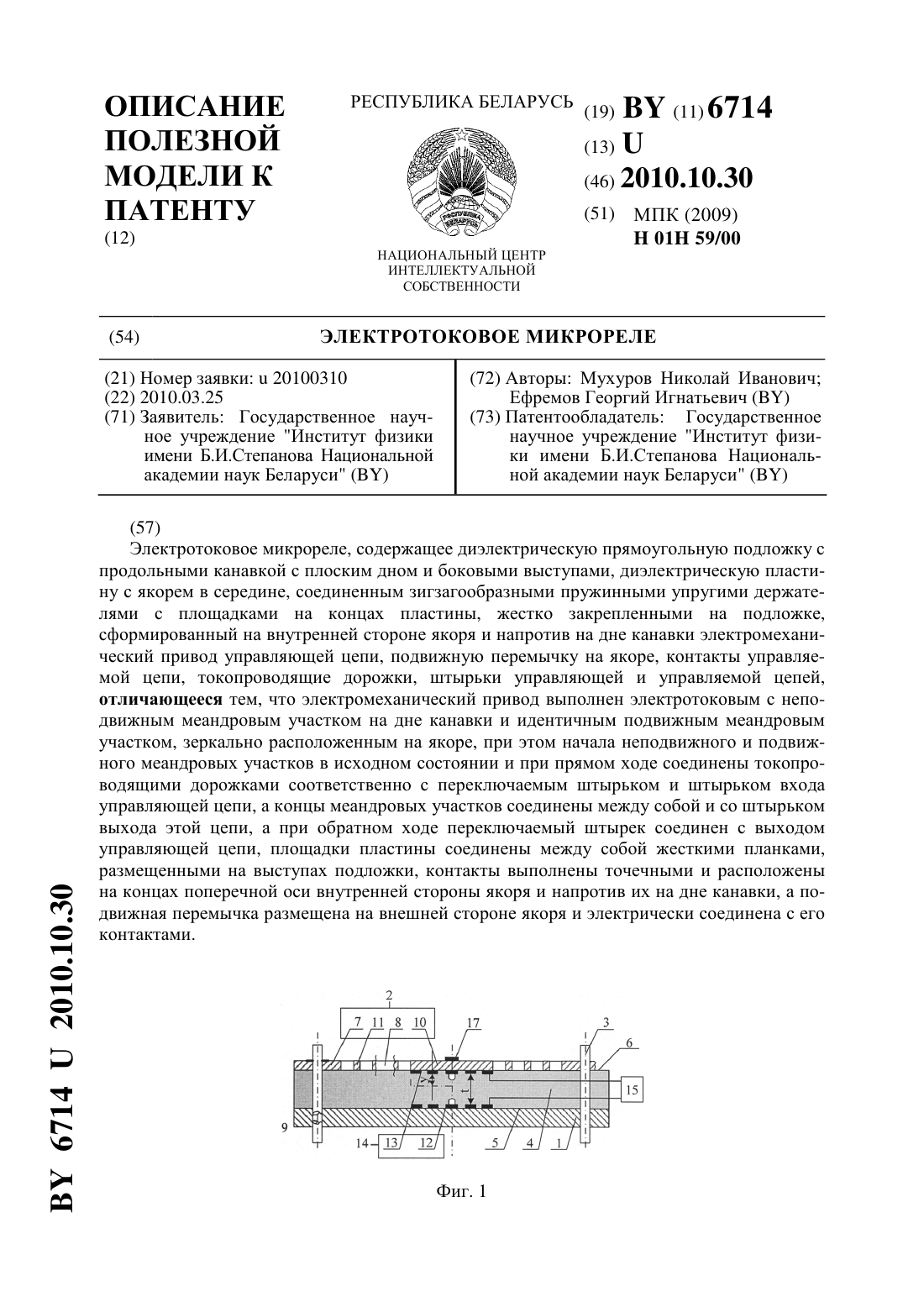
Номер патента: U 6714
Опубликовано: 30.10.2010
Авторы: Мухуров Николай Иванович, Ефремов Георгий Игнатьевич
МПК: H01H 59/00
Метки: микрореле, электротоковое
Текст:
...состояние. МЭМС микрореле с электромеханическим приводом не обеспечивает надежности функционирования СВЧ-устройств. Технической задачей полезной модели является повышение надежности функционирования электротокового микрореле как СВЧ-устройства. Решение технической задачи достигается тем, что в электротоковом микрореле, содержащем диэлектрическую прямоугольную подложку с продольными канавкой с плоским дном и боковыми выступами,...
Предыдущий патент: Коллинеарный поляризационный фильтр
Следующий патент: Почвообрабатывающее устройство
Случайный патент: Микротом для выделения переживающих срезов головного мозга животных