Преобразователи давления
Номер патента: 7286
Опубликовано: 30.09.2005
Авторы: ФРИК, Роджер, Л., ТОЙ, Адриан, С., ЛОУВАГИ, Беннетт, Л.
Текст
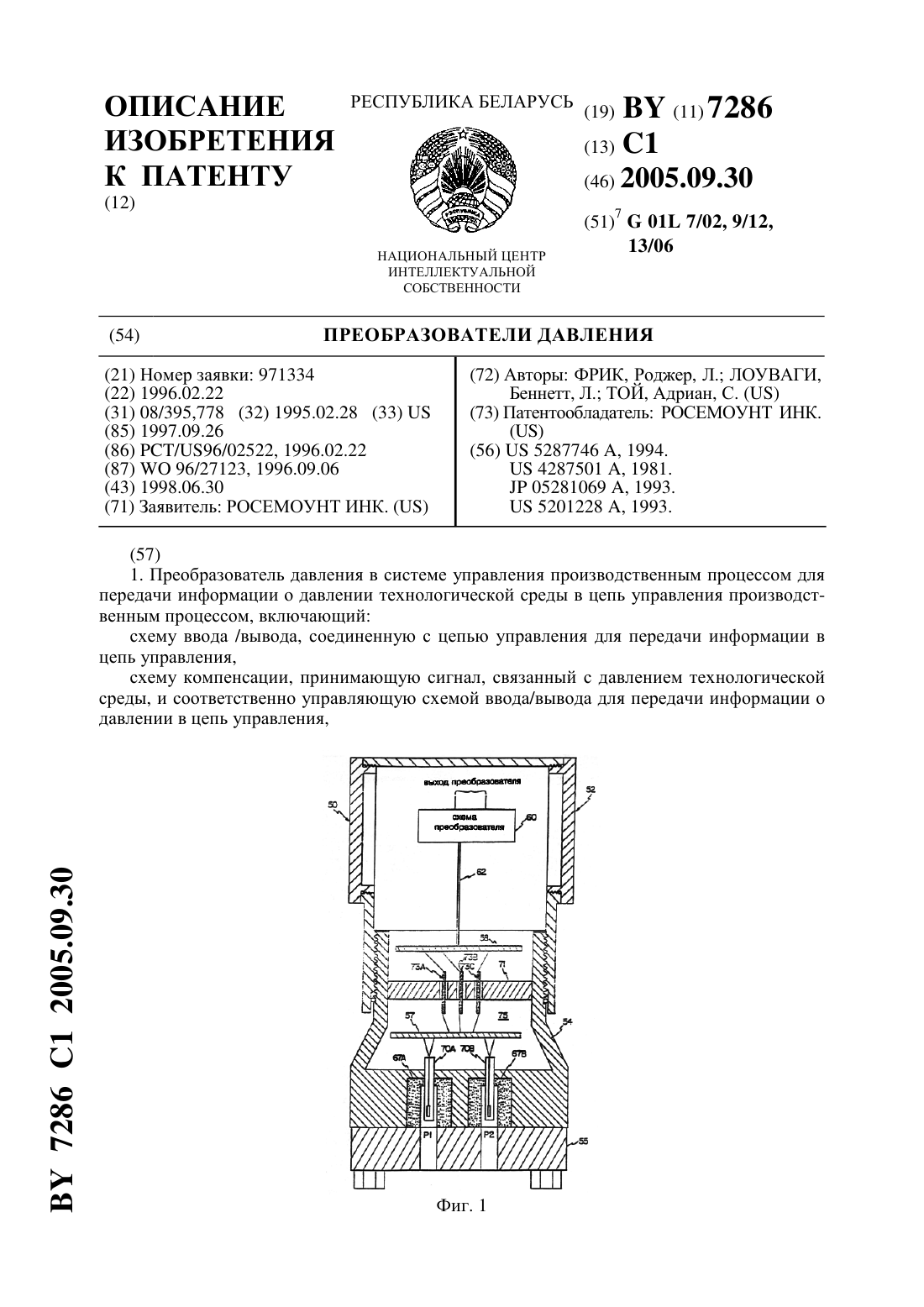
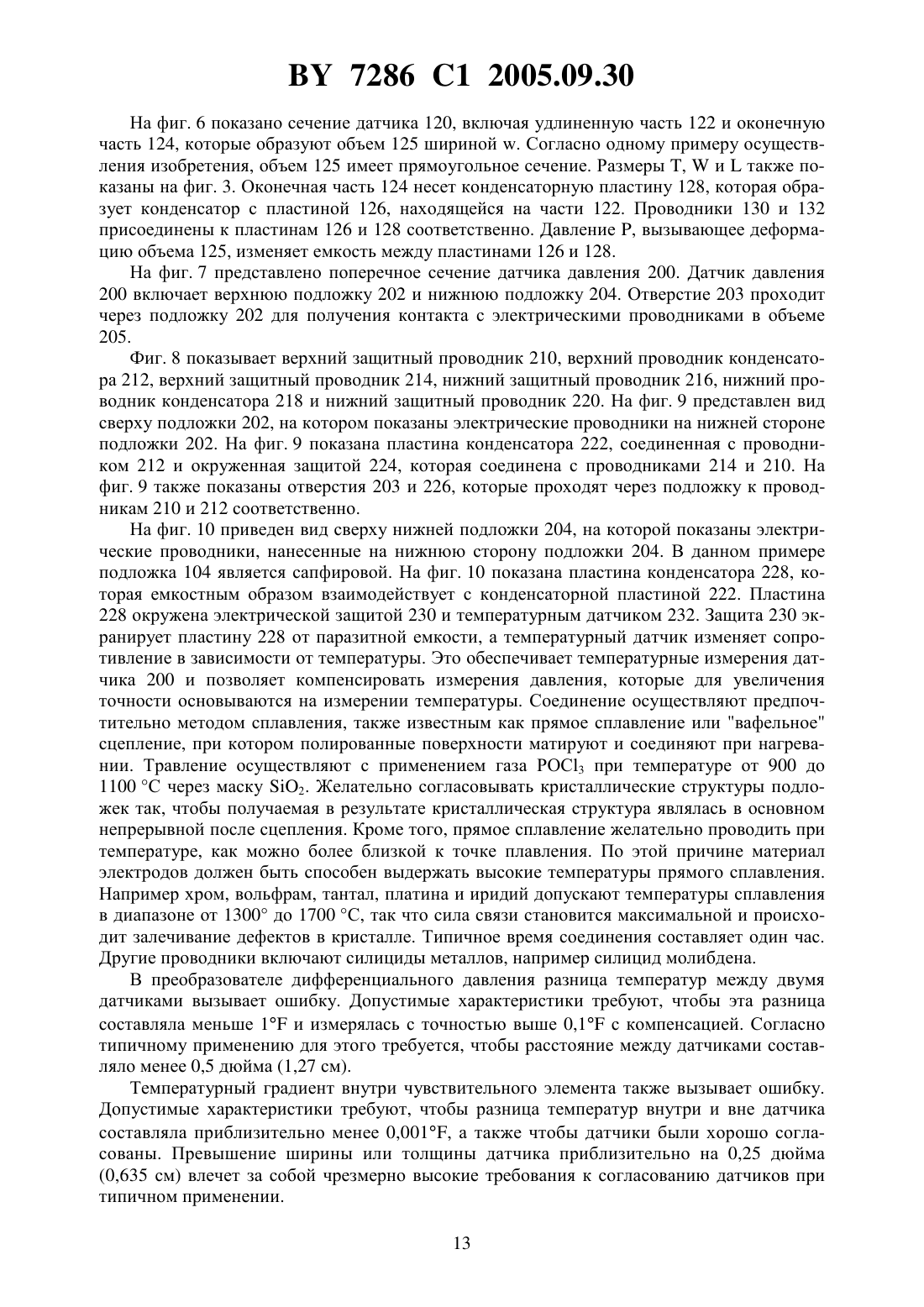
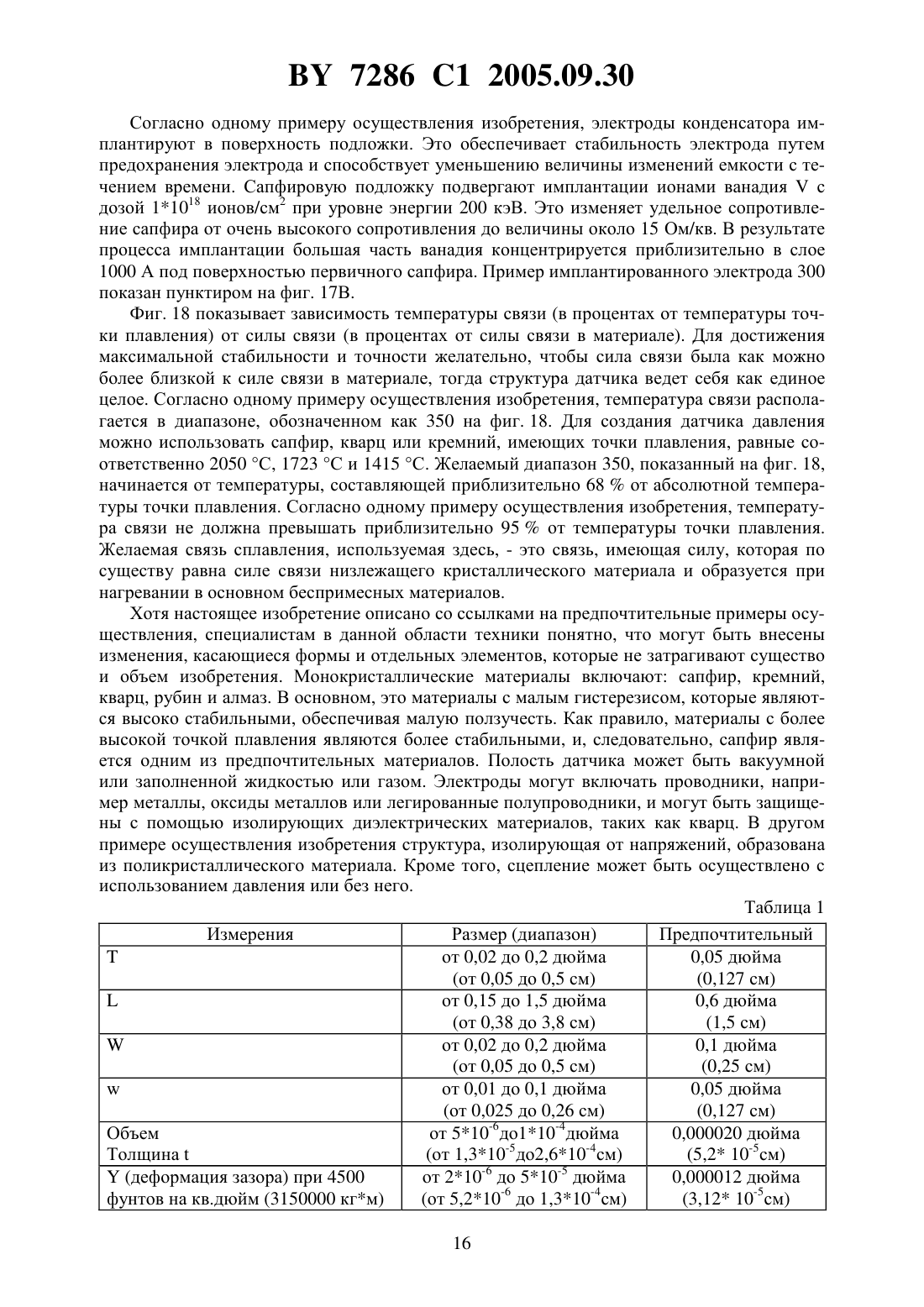
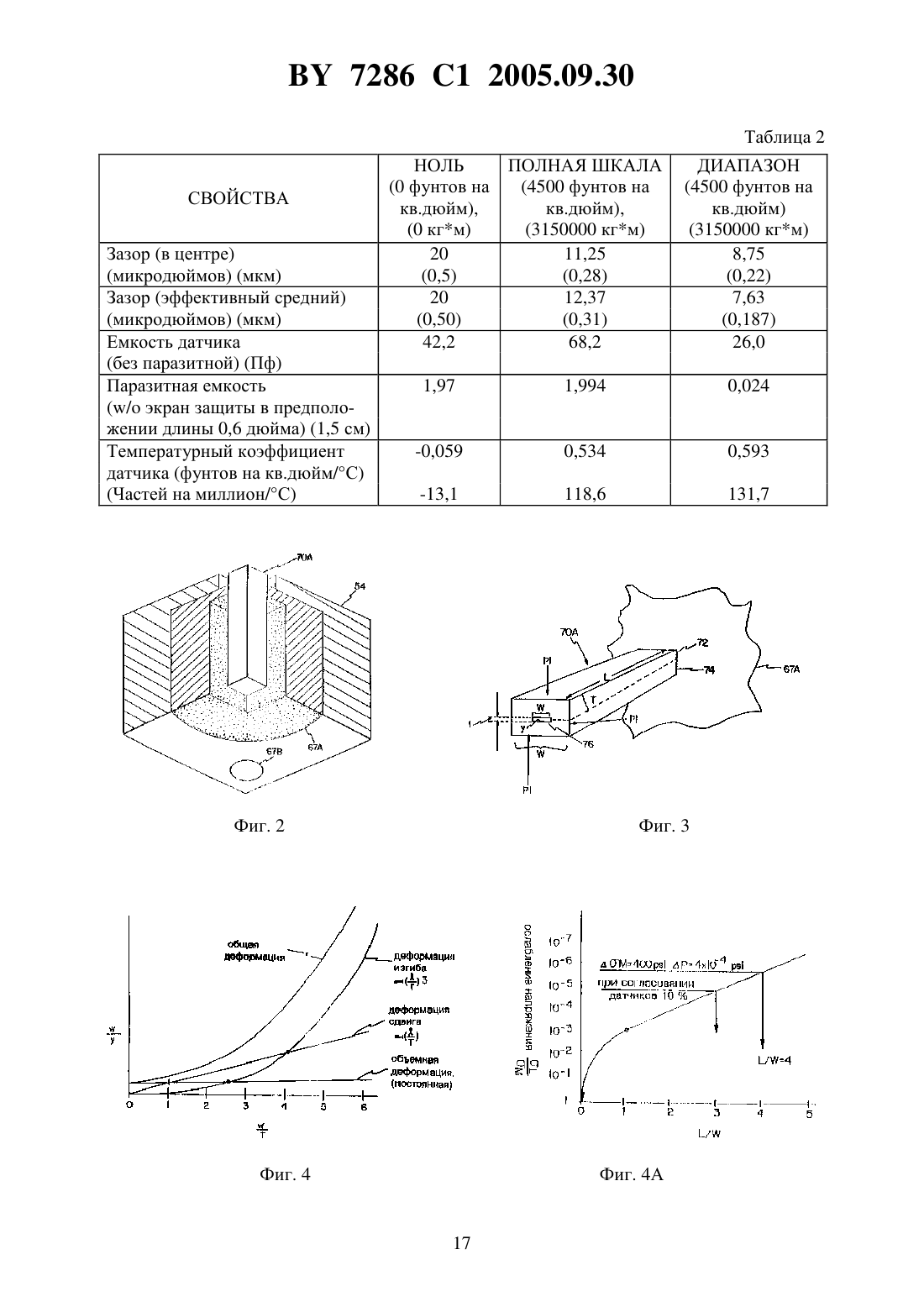
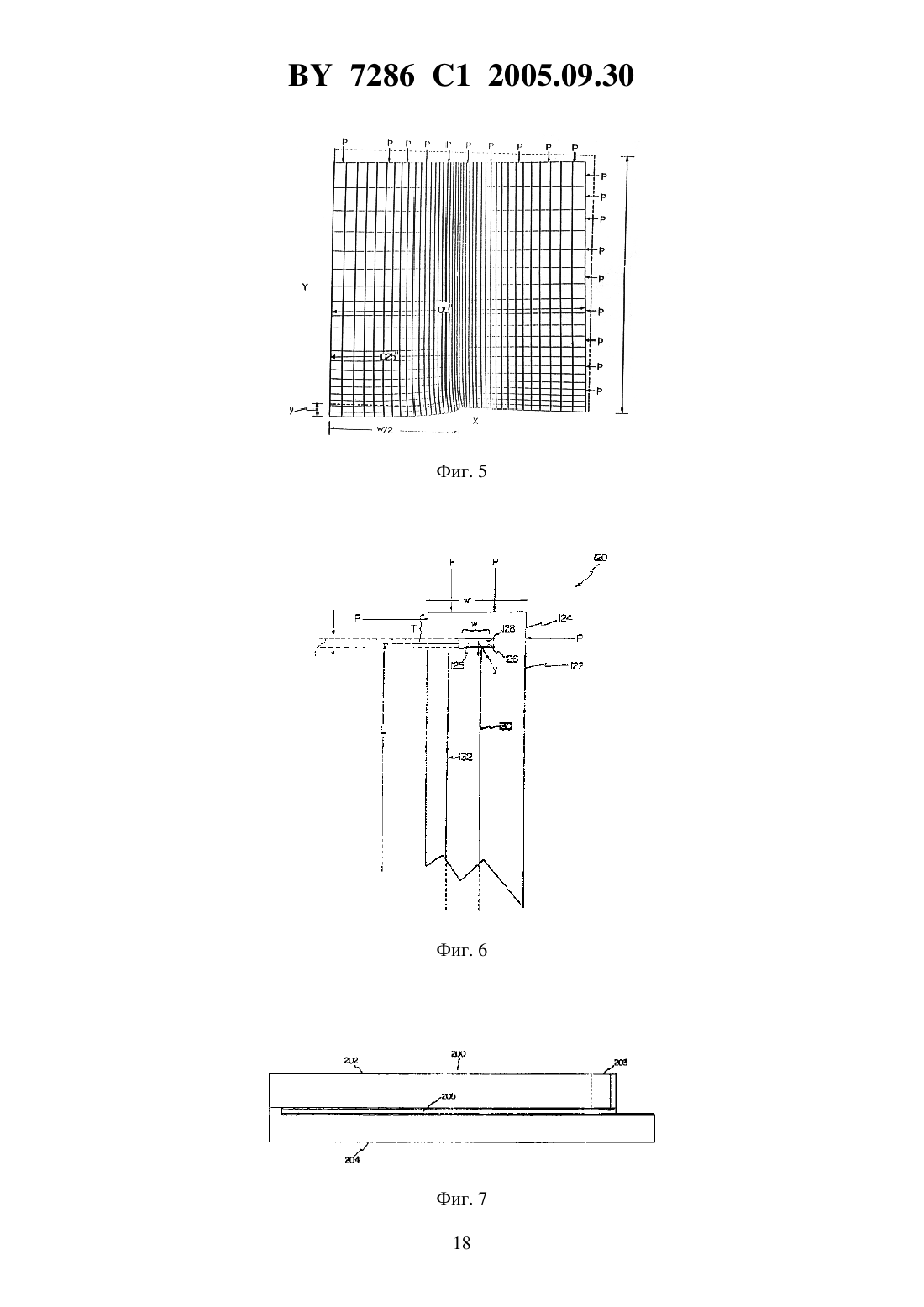
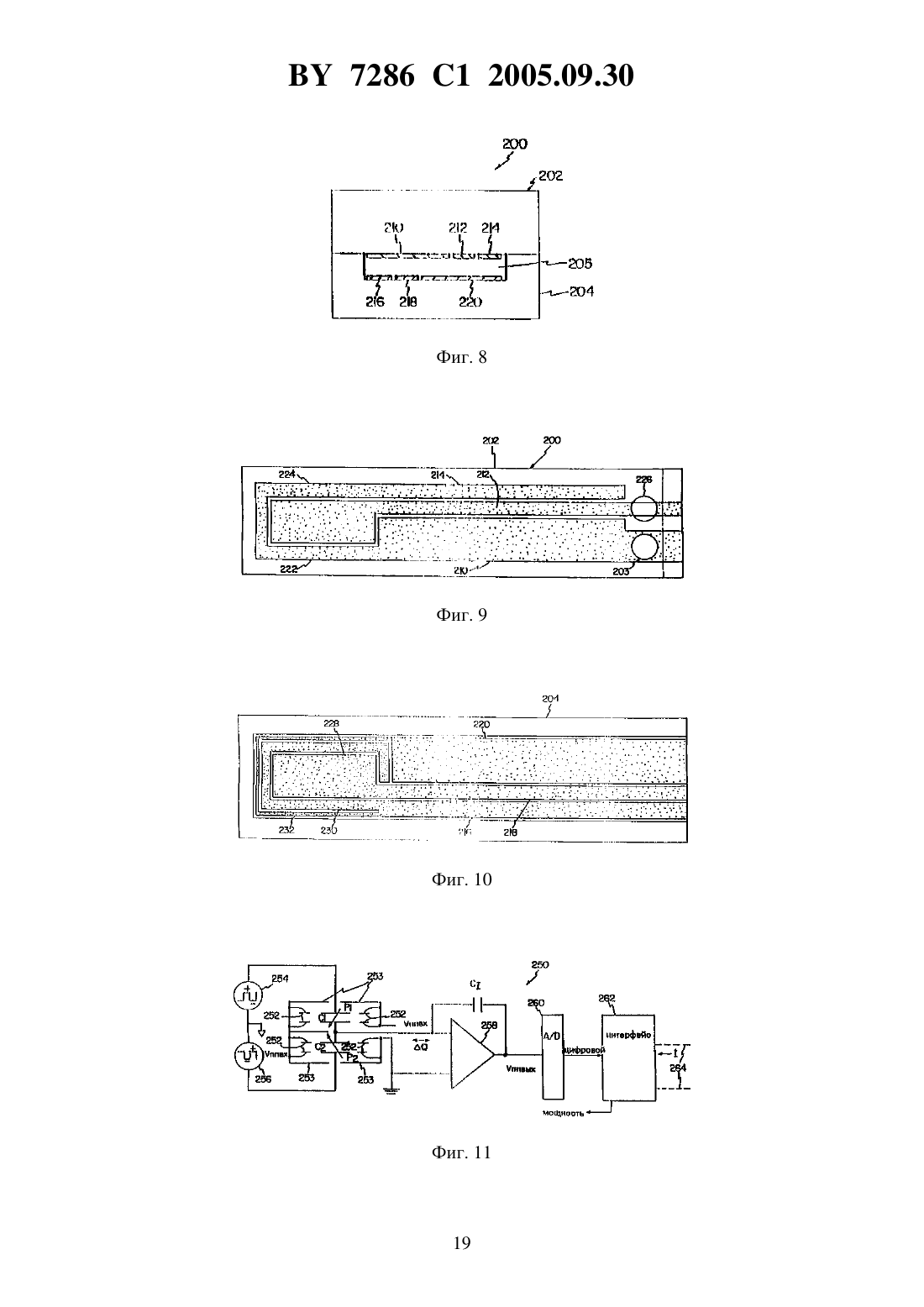
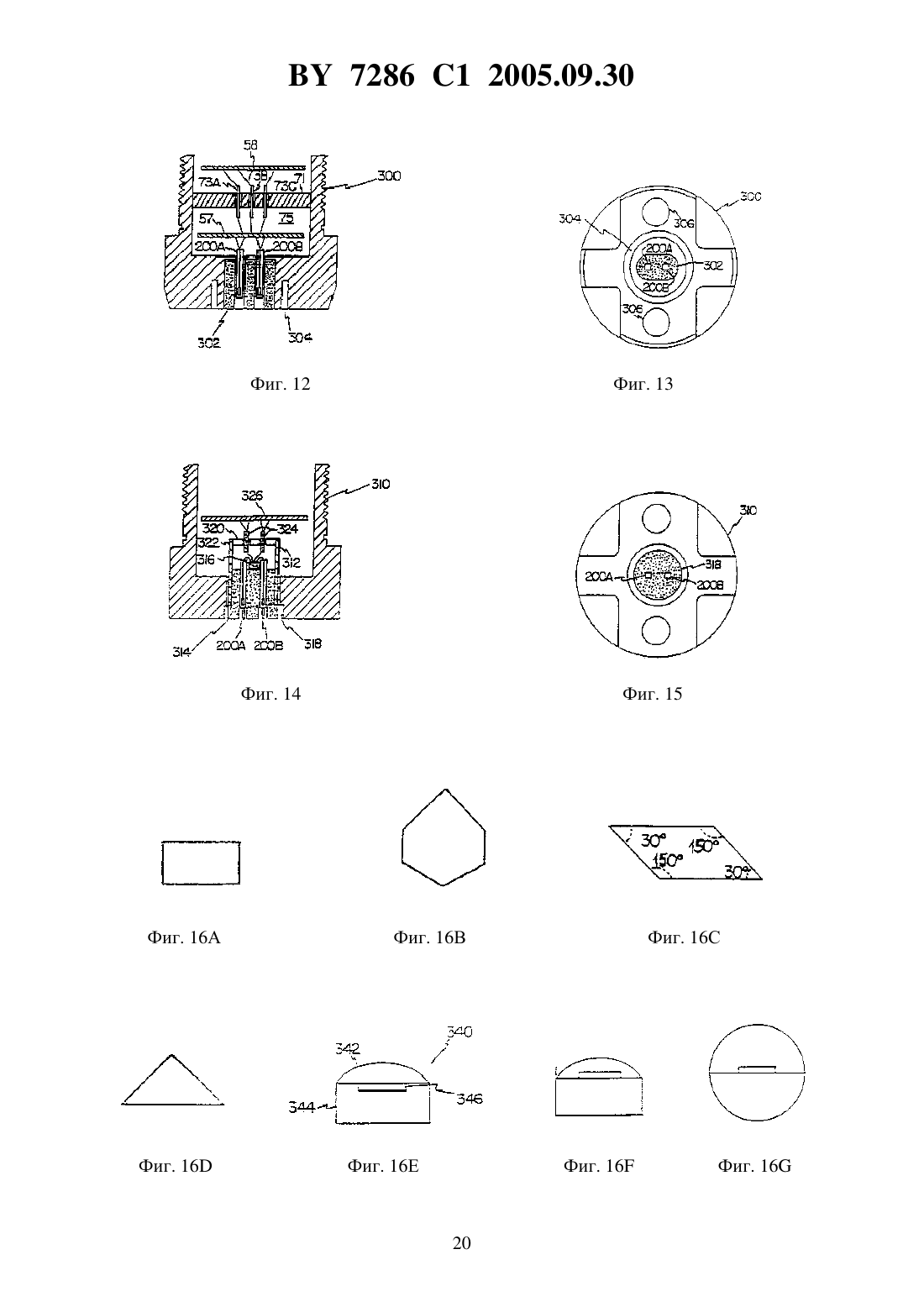
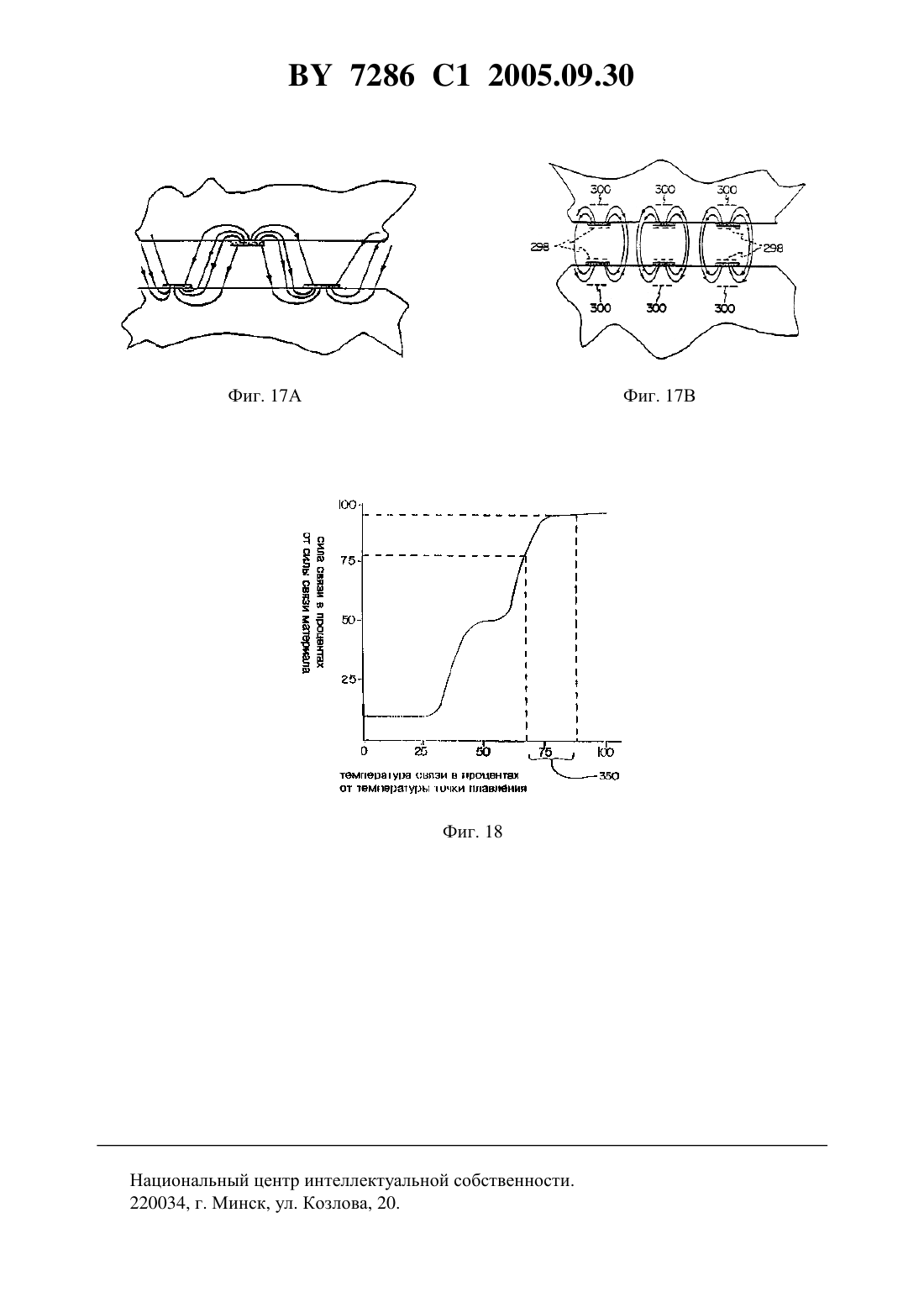
(57) 1. Преобразователь давления в системе управления производственным процессом для передачи информации о давлении технологической среды в цепь управления производственным процессом, включающий схему ввода /вывода, соединенную с цепью управления для передачи информации в цепь управления,схему компенсации, принимающую сигнал, связанный с давлением технологической среды, и соответственно управляющую схемой ввода/вывода для передачи информации о давлении в цепь управления, Фиг. 1 7286 1 2005.09.30 корпус преобразователя, содержащий схему ввода/вывода и схему компенсации,установочную часть в корпусе, выполненную из керамического материала,технологический экран в корпусе, который изолирует схему ввода/вывода и схему компенсации от установочной части,удлиненный изолирующий напряжение элемент с проходящим через него каналом,образованный из монокристаллического хрупкого, стойкого к коррозии материала, который отличается от материала установочной части, и соединенный с установочной частью проксимальным концом,чувствительную к давлению часть из материала удлиненного изолирующего напряжение элемента на дистальном конце удлиненного изолирующего напряжение элемента для введения в среду, которая находится под давлением, относящимся к давлению технологической среды, деформируемую в ответ на давление технологической среды,емкостной датчик, соединенный с чувствительной к давлению частью и имеющий электрическое соединение со схемой компенсации через канал в удлиненном изолирующем напряжение элементе и через токоведущие проводники в технологическом экране в корпусе, причем емкостной датчик и электрические соединения изолированы от технологической среды посредством удлиненного изолирующего напряжение элемента,а связи между удлиненным изолирующим напряжение элементом и чувствительной к давлению частью выполнены путем сплавления и свободны от примесного материала. 2. Преобразователь давления по п. 1, отличающийся тем, что удлиненный изолирующий напряжение элемент включает проходящую через него полость для подачи опорного давления к чувствительной к давлению части. 3. Преобразователь давления по п. 1, отличающийся тем, что содержит второй удлиненный изолирующий напряжение элемент, соединенный с установочной частью и связанный со второй чувствительной к давлению частью, имеющую второй емкостной датчик, соединенный со схемой компенсации. 4. Преобразователь давления по п. 1, отличающийся тем, что удлиненный изолирующий напряжение элемент и чувствительная к давлению часть имеют ширинуи толщину Т, отношение / между которыми приблизительно меньше 4,0. 5. Преобразователь давления по п. 1, отличающийся тем, что удлиненный изолирующий напряжение элемент и чувствительная к давлению часть имеют ширинуи толщину Т, отношение / между которыми приблизительно меньше 2,3. 6. Преобразователь давления по п. 1, отличающийся тем, что удлиненный изолирующий напряжение элемент и чувствительная к давлению часть имеют ширинуи толщину Т, отношение / между которыми приблизительно меньше 1,0. 7. Преобразователь давления по п. 1, отличающийся тем, что электрическое соединение между емкостным датчиком и схемой компенсации выполнено в виде электрических проводников, имплантированных в удлиненный изолирующий напряжение элемент. 8. Преобразователь давления по п. 1, отличающийся тем, что удлиненный изолирующий напряжение элемент имеет длину , подвергаемую действию технологической среды, максимальную ширинуи отношение / приблизительно больше 3,0. 9. Преобразователь давления по п. 1, отличающийся тем, что емкостной датчик включает первую подложку из монокристалла сапфира с первой полированной поверхностью,имеющей полость с первой емкостной пластиной,вторую подложку из монокристалла сапфира со второй полированной поверхностью со второй емкостной пластиной,причем полость получена травлением горячим газом РОС 1 з через маску, а первая полированная поверхность соединена со второй полированной поверхностью путем сплавления при температуре, составляющей от 68 до 95 от точки плавления сапфира. 10. Преобразователь давления по п. 9, отличающийся тем, что емкостные пластины получены имплантацией в поверхность подложек. 2 7286 1 2005.09.30 11. Преобразователь давления по п. 9 или 10, отличающийся тем, что в качестве маски использован 2. 12. Преобразователь давления по п. 1, отличающийся тем, что емкостной датчик выполнен из хрупкого, стойкого к коррозии материала, установлен в корпусе и соединен с ним, при этом емкостной датчик включает первую подложку, связанную со второй подложкой сплавлением, в основном свободным от примесного материала, со сформированной полостью между первой и второй подложками,а также первую и вторую емкостные пластины, соединенные с внутренними стенками полости, емкость между которыми изменяется в результате деформации полости под действием давления. 13. Преобразователь давления по любому из пп. 9-12, отличающийся тем, что по меньшей мере одна емкостная пластина выполнена из металла, выбранного из группы,включающей хром, вольфрам, тантал, платину, иридий. 14. Преобразователь давления по любому из пп. 9-12, отличающийся тем, что по меньшей мере одна емкостная пластина выполнена из легированного полупроводника. 15. Преобразователь давления по любому из пп. 9-12, отличающийся тем, что по меньшей мере одна емкостная пластина включает силицид молибдена. 16. Преобразователь давления для использования в системе управления производственным процессом для обеспечения выходного сигнала, относящегося к разности давлений технологической среды, включающий корпус преобразователя,установочную часть в корпусе, выполненную из керамического материала,первую чувствительную к давлению часть, образованную из монокристаллического хрупкого, стойкого к коррозии материала, на которую воздействует первое давление технологической среды,первый емкостной датчик, соединенный с первой чувствительной к давлению частью,имеющий выходной сигнал, относящийся к отклику первой чувствительной к давлению части на первое давление технологической среды,первый удлиненный изолирующий напряжение элемент из материала первой чувствительной к давлению части, соединенный с установочной частью и связывающий первую чувствительную к давлению часть с корпусом преобразователя,вторую чувствительную к давлению часть из материала первой чувствительной к давлению части, на которую воздействует второе давление технологической среды,второй емкостной датчик, соединенный со второй чувствительной к давлению части,имеющий выходной сигнал, относящийся к отклику второй чувствительной к давлению части на второе давление технологической среды,второй удлиненный изолирующий напряжение элемент из материала первой чувствительной к давлению части, соединенный с установочной частью и связывающий вторую чувствительную к давлению часть с корпусом преобразователя,выходные средства в корпусе преобразователя, изолированные технологическим экраном от установочной части, соединенные с первым и вторым емкостными датчиками для определения разницы первого и второго давлений технологической среды и обеспечивающие выходной сигнал, относящийся к разности давлений,а связи между удлиненными изолирующими напряжение элементами и чувствительными к давлению частями выполнены путем сплавления и свободны от примесных материалов. 17. Преобразователь давления по п. 16, отличающийся тем, что первая и вторая чувствительные к давлению части расположены непосредственно в технологической среде, а монокристаллический материал является устойчивым к коррозии, вызываемой технологической средой. 18. Преобразователь давления по п. 16, отличающийся тем, что первая и вторая чувствительные к давлению части связаны с первым и вторым опорными давлениями и явля 3 7286 1 2005.09.30 ются чувствительными к разности между соответствующими опорным давлением и давлением технологической среды. 19. Преобразователь давления по п. 16, отличающийся тем, что опорные давления подаются вместе и являются равными. 20. Преобразователь давления по п. 16, отличающийся тем, что опорные давления являются независимыми от давлений технологической среды. 21. Преобразователь давления по п. 16, отличающийся тем, что опорные давления являются вакуумным давлением. 22. Преобразователь давления по п. 16, отличающийся тем, что опорные давления являются давлениями газа. 23. Преобразователь давления по п. 16, отличающийся тем, что хрупкий, стойкий к коррозии монокристаллический материал является сапфиром. 24. Преобразователь давления по п. 16, отличающийся тем, что первая и вторая чувствительные к давлению части поддерживаются при одной температуре посредством корпуса преобразователя. 25. Преобразователь давления по п. 24, отличающийся тем, что расстояние между чувствительными к давлению частями составляет менее 0,5 дюйма. 26. Преобразователь давления по п. 16, отличающийся тем, что технологические давления превышают 1000 фунтов на кв.дюйм, а разность давлений составляет менее 30 фунтов на кв.дюйм. 27. Преобразователь давления по п. 16, отличающийся тем, что каждая чувствительная к давлению часть поддерживается при постоянной температуре на всем протяжении. 28. Преобразователь давления по п. 16, отличающийся тем, что монокристаллический материал выбран из группы, включающей кремний, рубин, кварц, алмаз. 29. Преобразователь давления по п. 16, отличающийся тем, что первый и второй емкостные датчики включают первую подложку из монокристалла сапфира, с первой полированной поверхностью,имеющей полость с первой емкостной пластиной,вторую подложку из монокристалла сапфира, со второй полированной поверхностью,со второй емкостной пластиной,причем полость получена травлением горячим газом РОС 1 з через маску, а первая полированная поверхность соединена со второй полированной поверхностью путем сплавления при температуре, составляющей от 68 до 95 от точки плавления сапфира. 30. Преобразователь давления по п. 16, отличающийся тем, что емкостные пластины получены имплантацией в поверхность подложек. 31. Преобразователь давления по пп. 29. или 30, отличающийся тем, что в качестве маски использован 2. 32. Преобразователь давления по п. 16, отличающийся тем, что первый и второй емкостные датчики выполнены из хрупкого, стойкого к коррозии материала, установлены в корпусе и соединены с ним, при этом каждый из емкостных датчиков включает первую подложку, связанную со второй подложкой сплавлением, в основном свободным от примесного материала, со сформированной полостью между первой и второй положками,а также первую и вторую емкостные пластины, соединенные с внутренними стенками полости, емкость между которыми изменяется в результате деформации полости под действием давления. 33. Преобразователь давления по любому из пп. 16-32, отличающийся тем, что по меньшей мере одна емкостная пластина выполнена из металла, выбранного из группы,включающей хром, вольфрам, тантал, платину, иридий. 34. Преобразователь давления по любому из пп. 16-33, отличающийся тем, что по меньшей мере одна емкостная пластина выполнена из легированного полупроводника. 35. Преобразователь давления по любому из пп. 16-33, отличающийся тем, что по меньшей мере одна емкостная пластина включает силицид молибдена. 4 7286 1 2005.09.30 36. Преобразователь давления по п. 16, отличающийся тем, что выходные средства включают два генератора прямоугольных импульсов в корпусе преобразователя, каждый из которых подключен к емкостным пластинам соответствующего емкостного датчика,аналого-цифровой преобразователь в корпусе преобразователя давления, цифровой выходной сигнал которого является функцией разности емкостей емкостных датчиков,интерфейс в корпусе преобразователя, конфигурация которого предназначена для передачи сигнала давления на цепь управления производственным процессом как функции преобразованного в цифровую форму выходного сигнала емкостных датчиков. Настоящее изобретение относится к промышленным системам управления производственными процессами. В частности, изобретение относится к преобразователям давления. Преобразователи давления в промышленных системах измеряют давление технологического процесса с высокой чувствительностью и передают информацию по двухпроводной линии, используемой в процессе, например, по токовой цепи на 4-20 мА. Датчики давления в преобразователях обычно включают некоторый тип структуры, чувствительной к давлению, которая имеет деформируемую диафрагму, перемещающуюся в соответствии с приложенным давлением. Эти структуры могут использоваться для измерения как абсолютного, так и дифференциального давления. В настоящем изобретении датчик дифференциального давления является датчиком, который измеряет относительно небольшие разности давлений (например возникающие в поперечном сечении расходомера Вентури или между двумя различными высотами в контейнере, заполненном жидкостью или газом) в относительно большом диапазоне абсолютных давлений. В типичном преобразователе известного уровня техники для измерения дифференциального давления к противоположным сторонам структуры прикладываются два различных давления, вызывая относительную деформацию структуры, которая подлежит измерению. Измерение деформации можно осуществлять, например, путем измерения изменения электрической емкости из-за перемещения пластин конденсатора, нанесенных на структуру, или изменения сопротивления резистивного тензодатчика. Возникла необходимость в высокоточных датчиках абсолютного давления. Однако трудно было получить датчик абсолютного давления, обеспечивающий точные измерения в широком диапазоне давлений, например от 0,4 фунта на квадратный дюйм до 4000 фунтов на квадратный дюйм (от 280 кгм до 2800000 кгм). Кроме того, желательно измерять дифференциальное давление с помощью двух датчиков абсолютного давления, потому что механически это осуществить проще, чем прикладывать механически два давления к датчику дифференциального давления. Кроме того, избыточное давление в таком дифференциальном датчике давления может разрушить датчик дифференциального давления. Однако трудно получить датчики абсолютного давления, имеющие точность, достаточную для измерения дифференциального давления в диапазоне от 0,4 фунтов на квадратный дюйм (280 кгм) до 40 фунтов на квадратный дюйм (28000 кгм) в устройствах,которые должны выдерживать статическое или линейное экстремальное давление до 4000 фунтов на квадратный дюйм (2800000 кгм). Например точность 0,01 при давлении 4 фунта на квадратный дюйм (2800 кгм) требует точности 0.00001 при давлении 4000 фунтов на квадратный дюйм (2800000 кгм) (10-7 или 0,1 частей на миллион). Типичные известные датчики давления, используемые в процессах, в зависимости от датчика различаются по чувствительности к измеряемому давлению, а также по нежелательным откликам на внешние параметры, например на температуру. Это может быть особой проблемой, когда выходные сигналы двух датчиков абсолютного давления или тензодатчиков объединяются для получения выходного сигнала, представляющего дифференциальное давление, или когда датчик используется в большом диапазоне давлений. 5 7286 1 2005.09.30 Кроме того, механическое напряжение, связанное с установкой датчика на преобразователь давления, приводит к достаточно большим ошибкам в измерении давления. Предметом изобретения является преобразователь давления в системе управления производственным процессом для передачи информации о давлении технологической среды в цепь управления производственным процессом, включающий схему ввода/вывода, соединенную с цепью управления для передачи информации в цепь управления,схему компенсации, принимающую сигнал, связанный с давлением технологической среды, и соответственно управляющую схемой ввода/вывода для передачи информации о давлении в цепь управления,корпус преобразователя, содержащий схему ввода/вывода и схему компенсации,установочную часть в корпусе, выполненную из керамического материала,технологический экран в корпусе, который изолирует схему ввода/вывода и схему компенсации от установочной части,удлиненный изолирующий напряжение элемент с проходящим через него каналом, образованный из монокристаллического хрупкого, стойкого к коррозии материала, который отличается от материала установочной части, и соединенный с установочной частью проксимальным концом,чувствительную к давлению часть из материала удлиненного изолирующего напряжение элемента на дистальном конце удлиненного изолирующего напряжение элемента для введения в среду, которая находится под давлением, относящимся к давлению технологической среды, деформируемую в ответ на давление технологической среды,емкостной датчик, соединенный с чувствительной к давлению частью и имеющий электрическое соединение со схемой компенсации через канал в удлиненном изолирующем напряжение элементе и через токоведущие проводники в технологическом экране в корпусе, причем емкостной датчик и электрические соединения изолированы от технологической среды посредством удлиненного изолирующего напряжение элемента,а связи между удлиненным изолирующим напряжение элементом и чувствительной к давлению частью выполнены путем сплавления и свободны от примесного материала. В предпочтительном варианте удлиненный изолирующий напряжение элемент включает проходящую через него полость для подачи опорного давления к чувствительной к давлению части. В предпочтительном варианте преобразователь давления содержит второй удлиненный изолирующий напряжение элемент, соединенный с установочной частью и связанный со второй чувствительной к давлению частью, имеющей второй емкостной датчик, соединенный со схемой компенсации. В предпочтительном варианте удлиненный изолирующий напряжение элемент и чувствительная к давлению часть имеют ширинуи толщину , отношение / между которыми приблизительно меньше 4,0, предпочтительно приблизительно меньше 2,3 и еще предпочтительней приблизительно меньше 1,0. В предпочтительном варианте электрическое соединение между емкостным датчиком и схемой компенсации выполнено в виде электрических проводников, имплантированных в удлиненный изолирующий напряжение элемент, который имеет длину , подвергаемую действию технологической среды, максимальную ширинуи отношение / приблизительно больше 3,0. В предпочтительном варианте емкостной датчик включает первую подложку из монокристалла сапфира, с первой полированной поверхностью,имеющей полость с первой емкостной пластиной,вторую подложку из монокристалла сапфира, со второй полированной поверхностью со второй емкостной пластиной,причем полость получена травлением горячим газом РОС 1 з через маску, а первая полированная поверхность соединена со второй полированной поверхностью путем сплав 6 7286 1 2005.09.30 ления при температуре, составляющей от 68 до 95 от точки плавления сапфира, причем емкостные пластины получены имплантацией в поверхность подложек, а в качестве маски использован 2. Предпочтительно емкостной датчик выполнен из хрупкого, стойкого к коррозии материала, установлен в корпусе и соединен с ним, при этом емкостной датчик включает первую подложку, связанную со второй подложкой сплавлением, в основном свободным от примесного материала, со сформированной полостью между первой и второй подложками,а также первую и вторую емкостные пластины, соединенные с внутренними стенками полости, емкость между которыми изменяется в результате деформации полости под действием давления. В предпочтительных вариантах по меньшей мере одна емкостная пластина выполнена из металла, выбранного из группы, включающей хром, вольфрам, тантал, платину, иридий, и по меньшей мере одна емкостная пластина выполнена из легированного полупроводника, и предпочтительно по меньшей мере одна емкостная пластина включает силицид молибдена. Предметом изобретения является также преобразователь давления для использования в системе управления производственным процессом для обеспечения выходного сигнала,относящегося к разности давлений технологической среды, включающий корпус преобразователя,установочную часть в корпусе, выполненную из керамического материала,первую чувствительную к давлению часть, образованную из монокристаллического хрупкого, стойкого к коррозии материала, на которую воздействует первое давление технологической среды,первый емкостной датчик, соединенный с первой чувствительной к давлению частью,имеющий выходной сигнал, относящийся к отклику первой чувствительной к давлению части на первое давление технологической среды,первый удлиненный изолирующий напряжение элемент из материала первой чувствительной к давлению части, соединенный с установочной частью и связывающий первую чувствительную к давлению часть с корпусом преобразователя,вторую чувствительную к давлению часть из материала первой чувствительной к давлению части, на которую воздействует второе давление технологической среды,второй емкостной датчик, соединенный со второй чувствительной к давлению частью,имеющий выходной сигнал, относящийся к отклику второй чувствительной к давлению части на второе давление технологической среды,второй удлиненный изолирующий напряжение элемент из материала первой чувствительной к давлению части, соединенный с установочной частью и связывающий вторую чувствительную к давлению часть с корпусом преобразователя,выходные средства в корпусе преобразователя, изолированные технологическим экраном от установочной части, соединенные с первым и вторым емкостными датчиками для определения разницы первого и второго давлений технологической среды и обеспечивающие выходной сигнал, относящийся к разности давлений,а связи между удлиненными изолирующими напряжение элементами и чувствительными к давлению частями выполнены путем сплавления и свободны от примесных материалов. В предпочтительном варианте этого преобразователя давления первая и вторая чувствительные к давлению части расположены непосредственно в технологической среде, а монокристаллический материал является устойчивым к коррозии, вызываемой технологической средой. Предпочтительно первая и вторая чувствительные к давлению части связаны с первым и вторым опорными давлениями и являются чувствительными к разности между соответствующими опорным давлением и давлением технологической среды. 7 7286 1 2005.09.30 Предпочтительно опорные давления подаются вместе и являются равными независимыми от давлений технологической среды. Опорные давления могут быть вакуумным давлением либо являются давлениями газа. В одном из вариантов выполнения первая и вторая чувствительные к давлению части поддерживаются при одной температуре посредством корпуса преобразователя, причем расстояние между чувствительными к давлению частями составляет менее 0,5 дюйма. В предпочтительных вариантах технологические давления превышают 1000 фунтов на кв.дюйм, а разность давлений составляет менее 30 фунтов на кв.дюйм, а каждая чувствительная к давлению часть поддерживается при постоянной температуре на всем протяжении. Предпочтительно монокристаллический материал выбран из группы, включающей кремний, рубин, кварц, алмаз, сапфир. В одном из примеров выполнения изобретения первый и второй емкостные датчики включают первую подложку из монокристалла сапфира, с первой полированной поверхностью,имеющей полость с первой емкостной пластиной,вторую подложку из монокристалла сапфира, со второй полированной поверхностью,со второй емкостной пластиной,причем полость получена травлением горячим газом 3 через маску, а первая полированная поверхность соединена со второй полированной поверхностью путем сплавления при температуре, составляющей от 68 до 95 от точки плавления сапфира. Емкостные пластины могут быть получены имплантацией в поверхность подложек,при этом в качестве маски используют 2. В другом варианте исполнения первый и второй емкостные датчики выполнены из хрупкого, стойкого к коррозии материала, установлены в корпусе и соединены с ним, при этом каждый из емкостных датчиков включает первую подложку, связанную со второй подложкой сплавлением, в основном свободным от примесного материала, со сформированной полостью между первой и второй подложками,а также первую и вторую емкостные пластины, соединенные с внутренними стенками полости, емкость между которыми изменяется в результате деформации полости под действием давления. В этом варианте по меньшей мере одна емкостная пластина выполнена из металла,выбранного из группы, включающей хром, вольфрам, тантал, платина, иридий и по меньшей мере одна емкостная пластина выполнена из легированного полупроводника, и предпочтительно по меньшей мере одна емкостная пластина включает силицид молибдена. В одном из вариантов этого преобразователя давления выходные средства включают два генератора прямоугольных импульсов в корпусе преобразователя, каждый из которых подключен к емкостным пластинам соответствующего емкостного датчика,аналого-цифровой преобразователь в корпусе преобразователя давления, цифровой выходной сигнал которого является функцией разности емкостей емкостных датчиков,интерфейс в корпусе преобразователя, конфигурация которого предназначена для передачи сигнала давления на цепь управления производственным процессом как функции преобразованного в цифровую форму выходного сигнала емкостных датчиков. Изобретения проиллюстрировано на чертежах. Фиг. 1 - поперечное сечение преобразователя давления. Фиг. 2 - разрез аксонометрической проекции вставки, которая содержит датчик давления. Фиг. 3 - аксонометрическая проекция датчика давления. Фиг. 4 - график, который иллюстрирует работу датчика по настоящему изобретению. Фиг. 4 А - график зависимости ослабления напряжения от отношения / для датчика давления. 8 7286 1 2005.09.30 Фиг. 5 - изображение деформации одной четверти датчика давления, когда отношение/ равно 1.0. Фиг. 6 - поперечное сечение другого примера осуществления датчика давления согласно изобретению. Фиг. 7 - поперечное сечение датчика давления. Фиг. 8 - поперечное сечение датчика давления на рисунке 7. Фиг. 9 - схематичный вид сверху верхней подложки датчика давления, показанного на фиг. 7. Фиг. 10 - схематичный вид сверху нижней подложки датчика давления, показанного на фиг. 7. Фиг. 11 - блок-схема устройства для измерения емкости датчика давления. Фиг. 12 - поперечное сечение корпуса датчика. Фиг. 13 - вид снизу корпуса датчика, показанного на фиг. 12. Фиг. 14 - поперечное сечение корпуса датчика. Фиг. 15 - вид снизу корпуса датчика, показанного на фиг. 14. Фиг. 16- 16 показывают поперечные сечения различных примеров осуществления изобретения. Фиг. 17 А и 17 В показывают два примера осуществления пластин конденсатора согласно изобретению. Фиг. 18 - график зависимости температуры сцепления, представленной в процентах от температуры точки плавления, от силы связи, представленной в процентах от силы связи в материале. На фиг. 1 показан преобразователь давления 50, содержащий корпус преобразователя 52, корпус датчика 54 и фланец 55. Корпус датчика 54 включает датчики давления 7 и 70 В, которые измеряют соответственно абсолютное давление 1 и абсолютное давление Р 2 технологической жидкости. Корпус преобразователя 52 включает схему (ввода-вывода) преобразователя 60, которая передает информацию, относящуюся к давлениям 1 и Р 2, по двухпроводной линии управления процессом, например по токовой цепи на 4-20 мА. Печатная плата 57 соединяет печатную плату 58 датчика с датчиками 70 и 70 В и получает электрические сигналы, относящиеся к давлениям 1 и Р 2. Схема на печатной плате 58 датчика оцифровывает и обрабатывает эти сигналы и передает информацию о давлении к схеме 60 преобразователя по шине данных 62. Вставки 67 А и 67 В содержат датчики 70 и 70 В. Технологический экран 71 образует объем 75 и предотвращает утечку давленийи Р 2 в корпус датчика 54 при нарушениях вставок 67 А или 67 В. Объем 75 может быть вакуумным или заполненным инертным газом. Токопроводящие контакты 73 А, 73 В и 73 С обеспечивают электрические соединения через экран 71 между печатными платами 57 и 58. На фиг. 2 дано сечение аксонометрической проекции вставки 67 А, которая содержит датчик 70. В одном примере осуществления изобретения вставка 67 включает окись алюминия. Кроме того, датчик 70 должен быть маленьким по сравнению с корпусом 54 и располагаться относительно близко к датчику 70 В для уменьшения тепловых колебаний и, следовательно, увеличения точности. Это достигается тем, что тепловая постоянная времени датчика значительно меньше тепловой постоянной времени корпуса, что позволяет минимизировать температурные градиенты в чувствительном элементе. На фиг. 3 показан датчик 7 в соответствии с одним примером осуществления изобретения. Датчик 70 содержит верхнюю подложку 72 и нижнюю подложку 74, которые образуют между собой объем 76. На рисунке 3 показана общая длина , толщина , ширина , минимальная ширина объемадеформирующейся структуры чувствительного объема и центральная деформация у под действием приложенного давления . Типичные датчики известного уровня техники имеют диапазон отношений максимального давления к минимальному, в котором они работают точно, около 1001. Это прежде всего ограничивается непериодическими погрешностями в структуре и помехами. 9 7286 1 2005.09.30 Кроме того, датчики известного уровня техники имеют ограничения из-за использования материалов с несовершенной эластичностью, неполной изоляции от напряжений и низкого соотношения сигнал-шум чувствительного элемента. Например датчики давлений на основе металлов имеют недостатки, связанные с гистерезисом, ползучестью материалов и релаксацией. Датчики на основе керамик образованы матрицами кристаллов, обычно покрытых кремниевым стеклом, и также обладают этими недостатками. Датчики на основе стекла проявляют нестабильность из-за фазовых изменений и вязкости стекла. Обнаружено, что однокристальные материалы имеют исключительные эластические свойства и что датчики на основе таких материалов могут иметь улучшенную точность. Используют также датчики с однокристальными диафрагмами, однако из-за внутренних напряжений их, как правило, устанавливают под высоким растягивающим напряжениям. Кроме того,этот тип датчика обычно включает стеклянные или металлические структурные элементы и использует связующие материалы с низкой прочностью, такие как стеклообразную фритту, припой или эпоксидную смолу. Далее этот тип датчика обычно имеет неполную изоляцию от напряжения. Типичные датчики известного уровня техники используют масляное заполнение, такое как силиконовое масло, для использования с механизмами предохранения от избыточных давлений. Масляное заполнение также применяется, когда с датчиком давления связана изолирующая диафрагма, стойкая к коррозии. Отказ в таких датчиках происходит при потере заполняющей жидкости. Типичные изолирующие диафрагмы известного уровня техники выполнены из металла и служат для удержания частиц и коррозийных материалов вдали от датчика давления. Эти диафрагмы должны быть тонкими, чтобы минимизировать ошибки, однако это делает диафрагму особенно хрупкой и ограничивает срок службы диафрагмы. Кроме того, для различных применений требуются различные материалы диафрагм, и не существует такого металла, который может использоваться универсально. В настоящем описании приводится структура датчика давления, образованного из однокристального материала. Соединения материалов образованы присоединением методом сплавления, так что они, по существу, свободны от инородных материалов, которые могут привести к неточностям. Структура может быть окружена технологической средой, которая оказывает давление на структуру. Это становится возможным, потому что структура сформирована из материала, стойкого к коррозии. Хрупкий материал деформируется сжатием, что обеспечивает более высокий показатель отношения рабочего напряжения к напряжению ошибки и поэтому более высокий показатель отношения сигнал-шум. Это следует из того, что хрупкие материалы имеют большую прочность к сжатию, чем к растяжению. Эта конфигурация позволяет датчику быть менее чувствительным к коррозии внешней поверхности, потому что выходной сигнал меньше зависит от куба толщины и более линейно зависит от толщины. Размещение структуры в технологической среде улучшает надежность, поскольку устраняются изолирующие диафрагмы и масляное заполнение. Удлиненный стержень обеспечивает изоляцию от напряжения и образован из того же самого однокристального материала, что помогает уменьшить ошибки. Электрические связи обеспечиваются через удлиненный стержень и изолированы от жидкости процесса. Путь через стержень может также использоваться для подачи опорного давления. В одном примере осуществления изобретения используется стойкий к коррозии материал, например сапфир, и используется интегральный датчик, который позволяет устранить масляное заполнение и изолирующие диафрагмы. В одном примере осуществления изобретения согласованные датчики используются как двойные датчики для измерения дифференциального давления, что позволяет уменьшить ошибки, общие для двух датчиков. Желательно производить измерение емкости, поскольку это обеспечивает стабильный низкошумовой сигнал. Конденсаторы не имеют никакого внутреннего теплового шума, и они имеют высокий масштабный коэффициент с соответственно высоким выходным 10 7286 1 2005.09.30 сигналом, что минимизирует шумовой вклад электронной схемы детектирования. Они также имеют превосходную стабильность нуля и почти нулевой температурный коэффициент. Эти факторы делают возможным их практическое применение для детектирования очень небольших изменений давления в датчиках высокого давления, что встречается в дифференциальном преобразователе давления, основанном на двух независимых чувствительных элементах. Улучшенное разрешение давления достигают путем применения электронной схемы.3 Хорошо известно, что деформация изгиба у в диафрагме пропорциональна 2, где- эффективная минимальная ширина диафрагмы и- ее толщина 2. Выходной сигнал датчика поэтому сильно зависит от изменений размера. Известно, что деформация сдвига в диафрагме пропорциональна 32 /2(2 / ) . Это уменьшает зависимость изменения выходного сиг нала от размеров датчика, но это изменение может быть далее уменьшено при учете объемного отклонения, как определено ниже. Деформация у объема 76 будет зависеть от влияния деформации изгиба, деформации сдвига и объемной деформации. Предположим, что / равно постоянной, которая больше 2, тогда это можно записать в следующем виде 3 где 1 - постоянная объемной деформации для материала К 2 - постоянная деформации сдвига для материала К 3 - постоянная деформации изгиба для материала- ширина датчика- внешнее давление у - центральная деформация объема 76 под действием приложенного давления- ширина объема 76- толщина до щели 76 датчика 70 (для квадратного поперечного сечения,/2)- толщина объема 76- длина датчика, которая намного больше шириныи толщиныдатчика- модуль Юнга и- модуль сдвига. Уравнение 1 показывает, что деформации сдвига и изгиба объема 76 зависят от ширины объемаи толщины датчика . Термин объемная деформация используется здесь для описания компоненты 1/ уравнения (1), где у прямо пропорционален ширинеобъема 76 (у). Поэтому объемная деформация является высокоточной и необходимой для определения давления и по существу не зависит от изменений толщины , возникающих при коррозии. Одна из целей настоящего изобретения заключается в создании датчика давления, имеющего такие размеры, при которых увеличивается вклад компоненты объемной деформации в общее отклонение датчика. На фиг. 4 представлены зависимости, полученные из уравнения (1), которые показывают общую деформацию и ее индивидуальные компоненты объемную деформацию, деформацию сдвига и деформацию изгиба. Когда значение / находится между 1 и 4, в общей деформации преобладает сдвиговая деформация. Когда значение / уменьшается,11 7286 1 2005.09.30 вклад деформации сдвига, по сравнению с объемной деформацией, уменьшается. Для значения / меньше, чем 1,0, объемная деформация является преобладающим фактором,способствующим общей деформации датчика 70 под действием приложенного давления. Таким образом, одна из целей изобретения заключается в создании датчика давления,имеющего отношение(ширины объема) к(толщине от внешней поверхности до внутренней поверхности) меньше или равное приблизительно 1,0. Чтобы деформация сдвига превысила деформацию изгиба, отношение / должно быть меньше 4,0. В одном примере осуществления изобретения отношение / составляет 0,05/1,0. Минимальное значение / определяется тем, насколько малым можно получитьна практике, а также погрешностями из-за тепловых градиентов, поскольку получают большое значение . Желательно минимизировать деформации растяжения в датчиках, сделанных из хрупких материалов, так как это уменьшает вероятность отказов из-за разрушения датчика. Одна из целей изобретения заключается в создании вокруг датчика измеряемого давления и придании датчику соответствующих размеров с тем, чтобы гидростатические напряжения сжатия превышали напряжения растяжения-изгиба. Так как напряжения, в основном,являются аддитивными, всю структуру полностью можно поддерживать в состоянии сжатия. Это происходит, когда / меньше приблизительно 2,3. При этом также достигают экранирования датчика 70 от напряжений. Напряжение,возникающее из-за крепления датчика 70 к корпусу 54, вызывает силу, действующую на датчик (дополнительно к силе, возникающей из-за приложенного давления), и вносит ошибку в измерение давления. Удлиненная структура уменьшает воздействие напряжения крепления и обеспечивает точное измерение дифференциального давления и широкий рабочий диапазон. Как правило, требования к напряжению крепления снижаются при увеличении длины . Любые ошибки, вызываемые напряжением крепления, должны быть эффективно ослаблены по всей длинедля получения требуемого значения ошибки измерения давления. На фиг. 4 А представлен график зависимости, которая показывает соотношение между ослаблением напряжения и отношением / для датчика на фиг. 3. Вертикальная ось на фиг. 4 А показывает отношение напряжения в точке крепленияк измеренному напряжению под действием напряжения крепления . Изменение в напряжении креплениявызывает ошибку в измерении давления, вызываемую изменением напряжения крепления на датчике давления . Согласно одному примеру осуществления изобретения, требуемая точность составляет 0,01 , с тем, чтобы при измерении давления 4 фунта на кв.дюйм (2800 кгм) величина ошибки, вызываемой напряжением крепления, должна составлять менее 410-4 фунта на кв.дюйм (0.28 кгм). Типичная величинасоставляет 400 фунтов на кв.дюйм (280000 кгм), так что ослабление напряжения крепления должно быть 4 10-4/40010-6. Как показано на фиг. 4 А, это возникает при значении отношения / приблизительно равном 4. В том примере осуществления изобретения, в котором для измерения дифференциального давления используются два датчика, согласованные с точностью 10 , соотношение/ уменьшается в 10 раз, так что / приблизительно равно 3. В одном из примеров осуществления изобретения величина / находится между 3 и 5. Фиг. 5 представляет собой поперечное сечение, показывающее картину смещения для датчика 70. На фиг. 5 показана одна четверть поперечного сечения датчика 70. На фиг. 5 толщина датчикаприблизительно равна ширине объема . Приложенное давление 4500 фунтов на квадратный дюйм (3150000 кгм) вызывает смещение в датчике 70. На фиг. 5 почти половина деформации вызвана растяжением смещения и почти половина - объемной деформацией. Это показано на фиг. 4, на которой есть и сдвиговая, и объемная деформации. Если датчик 70 находится в режиме объемного сжатия, то датчик 70 будет сохранять свою прямоугольную форму при приложении давления. Нарушения формы происходят, в основном, из-за сдвиговых деформаций. 12 7286 1 2005.09.30 На фиг. 6 показано сечение датчика 120, включая удлиненную часть 122 и оконечную часть 124, которые образуют объем 125 шириной . Согласно одному примеру осуществления изобретения, объем 125 имеет прямоугольное сечение. Размеры ,итакже показаны на фиг. 3. Оконечная часть 124 несет конденсаторную пластину 128, которая образует конденсатор с пластиной 126, находящейся на части 122. Проводники 130 и 132 присоединены к пластинам 126 и 128 соответственно. Давление , вызывающее деформацию объема 125, изменяет емкость между пластинами 126 и 128. На фиг. 7 представлено поперечное сечение датчика давления 200. Датчик давления 200 включает верхнюю подложку 202 и нижнюю подложку 204. Отверстие 203 проходит через подложку 202 для получения контакта с электрическими проводниками в объеме 205. Фиг. 8 показывает верхний защитный проводник 210, верхний проводник конденсатора 212, верхний защитный проводник 214, нижний защитный проводник 216, нижний проводник конденсатора 218 и нижний защитный проводник 220. На фиг. 9 представлен вид сверху подложки 202, на котором показаны электрические проводники на нижней стороне подложки 202. На фиг. 9 показана пластина конденсатора 222, соединенная с проводником 212 и окруженная защитой 224, которая соединена с проводниками 214 и 210. На фиг. 9 также показаны отверстия 203 и 226, которые проходят через подложку к проводникам 210 и 212 соответственно. На фиг. 10 приведен вид сверху нижней подложки 204, на которой показаны электрические проводники, нанесенные на нижнюю сторону подложки 204. В данном примере подложка 104 является сапфировой. На фиг. 10 показана пластина конденсатора 228, которая емкостным образом взаимодействует с конденсаторной пластиной 222. Пластина 228 окружена электрической защитой 230 и температурным датчиком 232. Защита 230 экранирует пластину 228 от паразитной емкости, а температурный датчик изменяет сопротивление в зависимости от температуры. Это обеспечивает температурные измерения датчика 200 и позволяет компенсировать измерения давления, которые для увеличения точности основываются на измерении температуры. Соединение осуществляют предпочтительно методом сплавления, также известным как прямое сплавление или вафельное сцепление, при котором полированные поверхности матируют и соединяют при нагревании. Травление осуществляют с применением газа РОС 3 при температуре от 900 до 1100 С через маску 2. Желательно согласовывать кристаллические структуры подложек так, чтобы получаемая в результате кристаллическая структура являлась в основном непрерывной после сцепления. Кроме того, прямое сплавление желательно проводить при температуре, как можно более близкой к точке плавления. По этой причине материал электродов должен быть способен выдержать высокие температуры прямого сплавления. Например хром, вольфрам, тантал, платина и иридий допускают температуры сплавления в диапазоне от 1300 до 1700 С, так что сила связи становится максимальной и происходит залечивание дефектов в кристалле. Типичное время соединения составляет один час. Другие проводники включают силициды металлов, например силицид молибдена. В преобразователе дифференциального давления разница температур между двумя датчиками вызывает ошибку. Допустимые характеристики требуют, чтобы эта разница составляла меньше 1 и измерялась с точностью выше 0,1 с компенсацией. Согласно типичному применению для этого требуется, чтобы расстояние между датчиками составляло менее 0,5 дюйма (1,27 см). Температурный градиент внутри чувствительного элемента также вызывает ошибку. Допустимые характеристики требуют, чтобы разница температур внутри и вне датчика составляла приблизительно менее 0,001, а также чтобы датчики были хорошо согласованы. Превышение ширины или толщины датчика приблизительно на 0,25 дюйма(0,635 см) влечет за собой чрезмерно высокие требования к согласованию датчиков при типичном применении. 13 7286 1 2005.09.30 На фиг. 11 представлена упрощенная блок-схема устройства 250 для восприятия дифференциального давления с использованием двух датчиков абсолютного давления, имеющих конденсаторы 1 и 2, чувствительные к давлению и размещенные в датчиках. Каждый датчик давления содержит защитные электроды 252, которые образуют конденсаторы, соединенные с заземлением 253 преобразователя 50. Корпус преобразователя,таким образом, обеспечивает экранировку или защиту для стабилизации емкостного сигнала и предотвращения воздействия электрического шума на схему. Кроме того, охранный электрод может быть нанесен на внешнюю поверхность датчика или внутреннюю поверхность керамической вставки, показанной на рисунке 1. Для согласования схем на ток 4-20 мА, которые имеют соединения с заземлением в других точках, может быть обеспечена электрическая изоляция. Конденсатор 1 подключен к генератору прямоугольных импульсов 254 и конденсатор 2 - к генератору прямоугольных импульсов 256. Инверсный вход малошумящего дифференциального усилителя 258 соединен с точкой между конденсаторами С 1 и 2, на которую не подается сигнал от генераторов, а прямой вход дифференциального усилителя 258 соединен с электрической землей. Дифференциальный усилитель 258 имеет отрицательную обратную связь через конденсатор 1 и имеет зарядот конденсаторов 1 и 2, втекающий и вытекающий на инверсном входе. Выходной сигнал дифференциального усилителя 258 является прямоугольным сигналом, представляющим дифференциальную емкость, который преобразуется в цифровой формат аналого-цифровым преобразователем 260. В схеме 250 представлен в виде(2) ппВХ(1-2) . А выходной сигнал усилителя представлен в следующем виде(3) ппВЫХ/1 ппВХ(1-2/1) С 1 должен быть выбран таким образом, чтобы он при максимальном дифференциальном давлении приблизительно равнялся (С 1-С 2)/2, например 1 пФ. Кроме того, для компенсации различий при производстве желательно иметь отдельный согласующий усилитель для каждого датчика. Помимо этого, должна быть включена схема для измерения 1,С 2 или 1 С 2 независимым образом для компенсации изменений в выходном сигнале,вносимых общим или линейным давлением. Схема для измерения выходной емкости описана в патенте США 5083091 под названием Сбалансированная по заряду схема для измерения обратной связи и полностью указана в настоящем изобретении. Выходной сигнал преобразователя 260 подается на схему интерфейса 262. Интерфейс 262 соединен с токовой цепью на 4-20 мА и обеспечивает цифровой сигнал от аналогоцифрового преобразователя 260 в токовой цепи 264 в цифровой или аналоговой форме. Интерфейс 262 также способен принимать команды, имеющиеся в стандарте связи. На фиг. 12 и 13 показаны другие примеры осуществления изобретения, в которых имеется корпус датчика 300 с размещенными в нем датчиками давления 200 А и 200 В. На фиг. 12 показано поперечное сечение корпуса датчика 300, а на фиг. 13 - вид сверху корпуса 300. Корпус 300 содержит печатные платы 57 и 58, соединенные проводами через токоведущие проводники 73 А, и 73 В, и 73 С, проходящие через защитный экран 71. Датчики 200 А и 200 В расположены в алюмосиликатной вставке 302. Защитный экран 71 образует камеру 75, которая может быть вакуумной или заполненной инертным газом. Канавка 304 окружает алюмосиликатную вставку 302 и обеспечивает изоляцию от тепла и напряжения. Отверстия крепления 306 используются для крепления корпуса 300 к трубе(не показана). В другом примере осуществления изобретения граница между датчиком и преобразователем является сплавленной границей. На фиг. 14 и 15 показан корпус датчика 310, включающий промежуточную оболочку 312, в которой расположена алюмосиликатная вставка 314. Датчики 200 А и 200 В расположены в алюмосиликатной вставке 314, в которой также размещен чип 316. Чип 316 выполняет те же функции, что и печатная плата 57. Канавка 318 обеспечивает 14 7286 1 2005.09.30 изоляцию от напряжений вставки 314 и датчиков 200 А и 200 В. Технологический экран 320 герметизирует оболочку 312, обеспечивая второй барьер для технологической среды. Объем 322 в оболочке 312 может быть заполнен вакуумом или инертным газом. Токоведущие проводники 324 обеспечивают путь для электрических соединений отчипа 316 к печатной плате 326. Конструкция, показанная на фиг. 3, позволяет проводить тестирование конструкции датчика до размещения оболочки 312 в корпусе датчика 310. Высокотемпературные технологические операции (например вваривание датчика в алюмосиликатную вставку) можно производить до размещения конструкции датчика в корпусе. В одном примере осуществления датчик давления, согласно изобретению, имеет размеры, представленные в табл. 1. Типичная величина емкости для датчика составляет 42 пФ при нулевом давлении. В одном примере осуществления изобретения параметры датчика давления представлены в табл. 2. На фиг. 16-16 показаны поперечные сечения датчика давления в соответствии с одной из целей изобретения. Фиг. 16 А показывает прямоугольную структуру, в которой все внутренние углы равны 90. Фиг. 16 В показывает гексагональную структуру датчика,в которой все внутренние углы равны 60. Ромбическая структура показана на фиг. 16 С, у которой два внутренних угла равны 150 и два угла - 30. Фиг. 16 представляет треугольную структуру, у которой все внутренние углы равны 60. Структуры, показанные на рисунках 16 А - 16, являются удобными структурами для сапфира, потому что они имеют тенденцию располагаться вдоль плоскостей кристалла сапфира. Фиг. 16 Е показывает датчик 340, в котором скругленная часть 342 присоединена к прямоугольной части 344. Полость 346 сформирована в прямоугольной части 344. Фиг. 16 показывает другую реализацию, в которой полость сформирована в скругленной части. Также возможны различные альтернативные решения, включая скругление обеих частей, как показано на рисунке 16. Желательно иметь круглое поперечное сечение, поскольку оно может быть плотно вставлено в круглое отверстие и заизолировано с помощью круглого кольца. Такой датчик может быть изготовлен при механической обработке квадратной структуры с помощью алмазного шлифовального круга. На фиг. 17-17 В приводятся примеры расположений электродов конденсаторных пластин. Нестабильности электродов вызывают ошибки в емкостных датчиках давления,которые имеют небольшие зазоры. Остаточные напряжения вызывают искривление структуры датчика давления. К тому же, изменения размеров поверхности электродов изменяют размер промежутка . Эти изменения могут быть вызваны окислением и уменьшением или миграцией атомов на противоположные поверхности. На фиг. 17 А и 17 В показаны примеры устранения этого недостатка, когда пластины конденсатора разделены на полоски,имеющие такую ширину и расположенные на таком расстоянии, что приводят к величине емкости, равной, по существу, емкости сплошного электрода. Например если подложка имеет диэлектрическую постоянную в 10 раз большую, чем диэлектрическая постоянная зазора, тогда расстояния могут быть почти в 10 раз больше размера зазора, и ширина может быть меньше, чем размер зазора. Это уменьшает количество материала, приводящего к деформации структуры датчика. Кроме того, полоски могут быть выполнены таким образом, чтобы большая часть электрического потока выходила из обратной стороны электродов. Поскольку обратная сторона электродов находится в контакте с сапфиром, это предохраняет от поверхностных эффектов и обеспечивает стабильную емкость даже при изменении размеров внутренней поверхности. На фиг. 17 А и 17 В показаны два примера конфигураций, которые увеличивают величину потока, исходящего из обратной стороны электродов. Варианты такого осуществления изобретения включают выполнение защитных электродов (298), которые располагаются над каждым электродом пластины и защищают каждый электрод пластины. Хотя эти пластины разделены, они похожи на обычные конденсаторные пластины благодаря их расположению и относительным размерам. 15 7286 1 2005.09.30 Согласно одному примеру осуществления изобретения, электроды конденсатора имплантируют в поверхность подложки. Это обеспечивает стабильность электрода путем предохранения электрода и способствует уменьшению величины изменений емкости с течением времени. Сапфировую подложку подвергают имплантации ионами ванадияс дозой 11018 ионов/см 2 при уровне энергии 200 кэВ. Это изменяет удельное сопротивление сапфира от очень высокого сопротивления до величины около 15 Ом/кв. В результате процесса имплантации большая часть ванадия концентрируется приблизительно в слое 1000 А под поверхностью первичного сапфира. Пример имплантированного электрода 300 показан пунктиром на фиг. 17 В. Фиг. 18 показывает зависимость температуры связи (в процентах от температуры точки плавления) от силы связи (в процентах от силы связи в материале). Для достижения максимальной стабильности и точности желательно, чтобы сила связи была как можно более близкой к силе связи в материале, тогда структура датчика ведет себя как единое целое. Согласно одному примеру осуществления изобретения, температура связи располагается в диапазоне, обозначенном как 350 на фиг. 18. Для создания датчика давления можно использовать сапфир, кварц или кремний, имеющих точки плавления, равные соответственно 2050 С, 1723 С и 1415 С. Желаемый диапазон 350, показанный на фиг. 18,начинается от температуры, составляющей приблизительно 68 от абсолютной температуры точки плавления. Согласно одному примеру осуществления изобретения, температура связи не должна превышать приблизительно 95 от температуры точки плавления. Желаемая связь сплавления, используемая здесь, - это связь, имеющая силу, которая по существу равна силе связи низлежащего кристаллического материала и образуется при нагревании в основном беспримесных материалов. Хотя настоящее изобретение описано со ссылками на предпочтительные примеры осуществления, специалистам в данной области техники понятно, что могут быть внесены изменения, касающиеся формы и отдельных элементов, которые не затрагивают существо и объем изобретения. Монокристаллические материалы включают сапфир, кремний,кварц, рубин и алмаз. В основном, это материалы с малым гистерезисом, которые являются высоко стабильными, обеспечивая малую ползучесть. Как правило, материалы с более высокой точкой плавления являются более стабильными, и, следовательно, сапфир является одним из предпочтительных материалов. Полость датчика может быть вакуумной или заполненной жидкостью или газом. Электроды могут включать проводники, например металлы, оксиды металлов или легированные полупроводники, и могут быть защищены с помощью изолирующих диэлектрических материалов, таких как кварц. В другом примере осуществления изобретения структура, изолирующая от напряжений, образована из поликристаллического материала. Кроме того, сцепление может быть осуществлено с использованием давления или без него. Таблица 1 Измерения Размер (диапазон) Предпочтительный(/ экран защиты в предположении длины 0,6 дюйма) (1,5 см) Температурный коэффициент датчика (фунтов на кв.дюйм/С) Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G01L 13/06, G01L 9/12, G01L 7/02
Метки: давления, преобразователи
Код ссылки
<a href="https://by.patents.su/21-7286-preobrazovateli-davleniya.html" rel="bookmark" title="База патентов Беларуси">Преобразователи давления</a>
Датчик давления
Номер патента: 4468
Опубликовано: 30.06.2002
Автор: Довгяло Дмитрий Александрович
МПК: G01L 9/14
Текст:
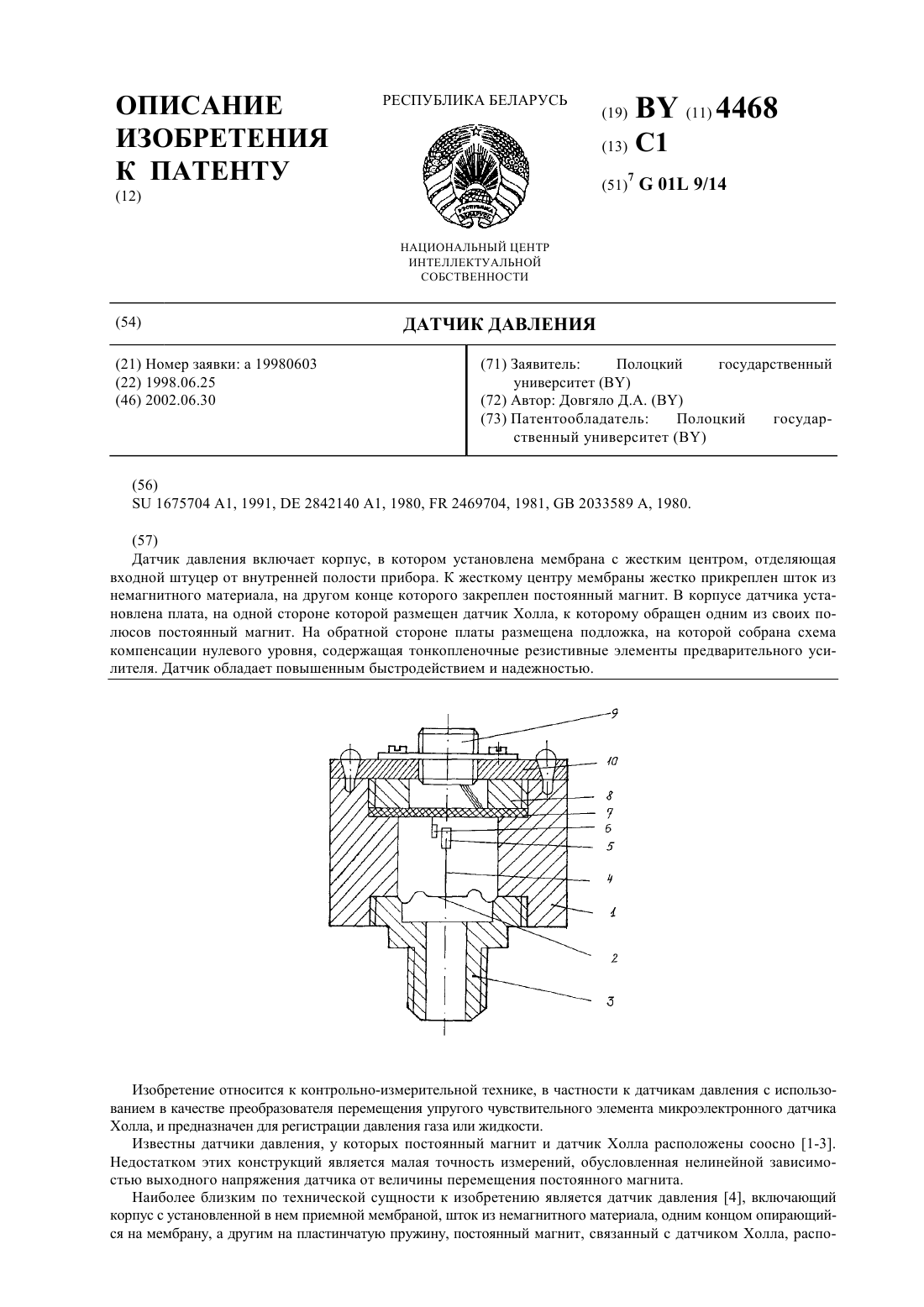
...и установленную в корпусе плату, на которой размещен датчик Холла, к которому обращен одним из своих полюсов постоянный магнит, в отличие от прототипа мембрана выполнена с жестким центром, к которому жестко прикреплен один конец штока, а на другом конце штока жестко закреплен постоянный магнит. Кроме того, в датчик введена схема компенсации нулевого уровня, состоящая из тонкопленочных резистивных элементов предварительного усилителя,...
Способ определения давления
Номер патента: 5625
Опубликовано: 30.12.2003
Авторы: Шилько Сергей Викторович, Бодрунов Николай Николаевич
МПК: G01N 3/08, G01N 3/00, G01L 11/00...
Метки: способ, давления, определения
Текст:
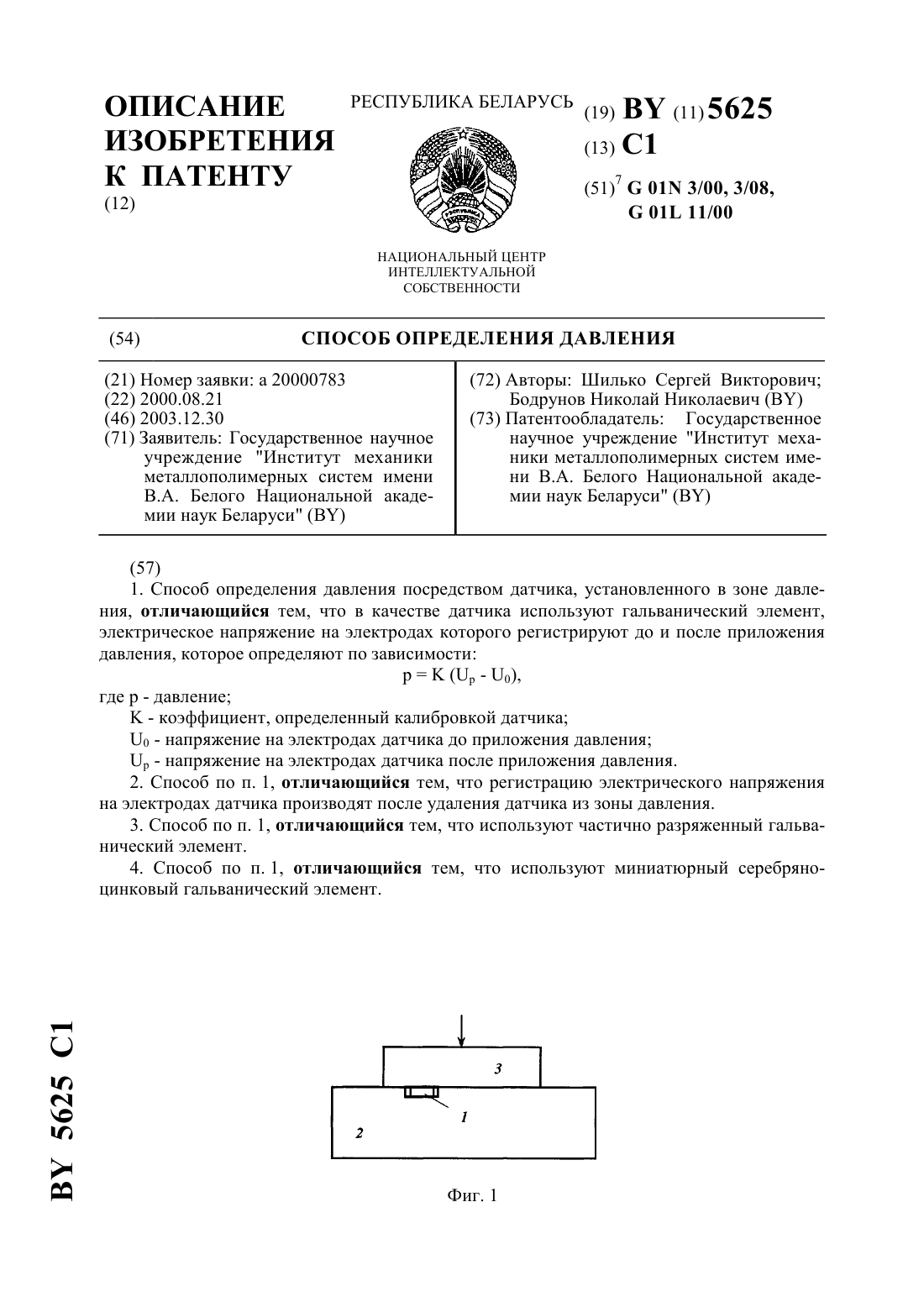
...из зоны нагружения для последующего измерения. На фиг. 1 показана схема установки в контакте одиночного датчика, на фиг. 2 - схема установки группы датчиков, на фиг. 3 показан чертеж датчика давления. 2 5625 1 В соответствии с предлагаемым способом датчик устанавливают в зоне давления, регистрируют электрическое напряжение используемого в качестве датчика гальванического элемента до и после нагружения, а контактное давление определяют по...
Датчик давления
Номер патента: U 230
Опубликовано: 30.03.2001
Авторы: Рымарев Виталий Анатольевич, Бурдин Сергей Максимович, Довгяло Дмитрий Александрович
МПК: G01L 9/14
Текст:
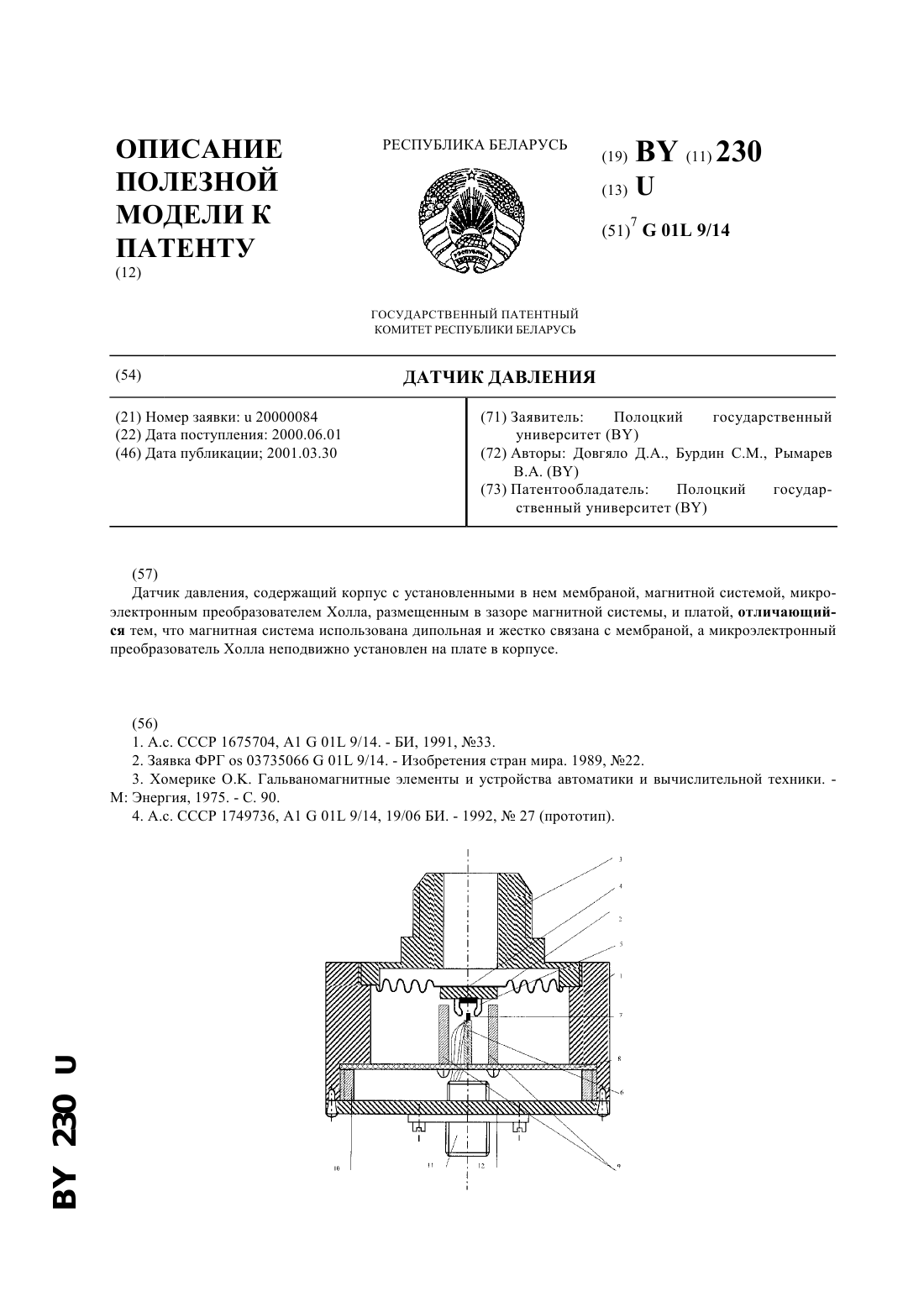
...кольцо, расположенное снаружи разделительной трубки и закрепленное в упругом центрирующем подвесе, с которым связан электрический измерительный преобразователь, выполненный в виде двух датчиков Холла, размещенных в зазоре магнита. В данной конструкции возникают погрешности,связанные с наличием передаточных элементов, что значительно увеличивает погрешность измерений. Кроме того, в конструкции применяется два постоянных магнита....
Устройство для измерения давления в подвижных деталях
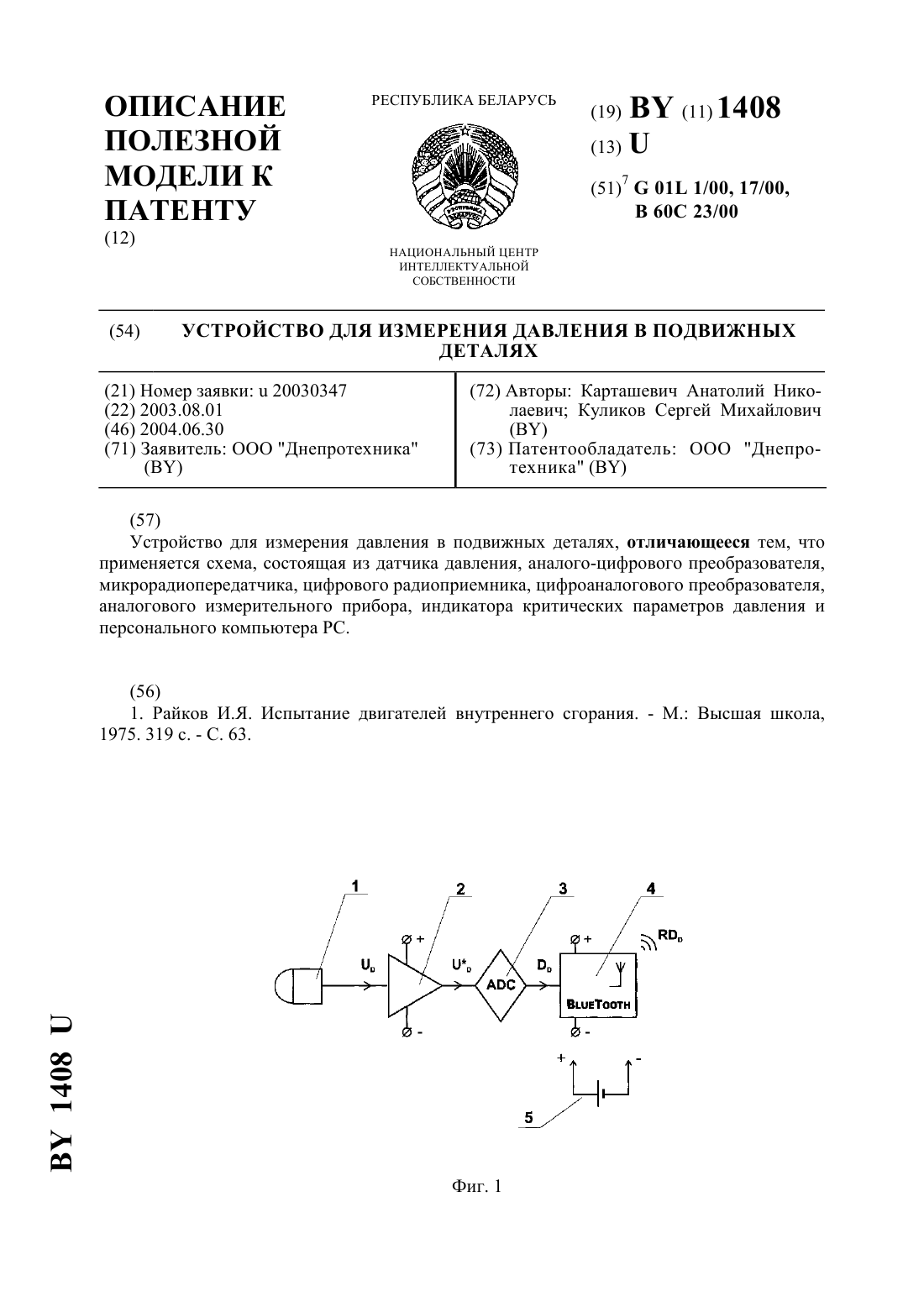
Номер патента: U 1408
Опубликовано: 30.06.2004
Авторы: Куликов Сергей Михайлович, Карташевич Анатолий Николаевич
МПК: B60C 23/00, G01L 1/00, G01L 17/00...
Метки: давления, устройство, деталях, измерения, подвижных
Текст:
...в подвижных деталях к колесу автомобиля. Схема передатчика (фиг. 1) устройства для измерения давления в подвижных деталях состоит из датчика давления 1, операционного усилителя 2, аналого-цифрового преобразователя 3, микрорадиопередатчика 4 и миниатюрного источника питания 5. Схема приемника (фиг. 2) состоит из цифрового радиоприемника 6, цифроаналогового преобразователя 7, аналогового измерительного прибора 8, индикатора критических...
Датчик давления
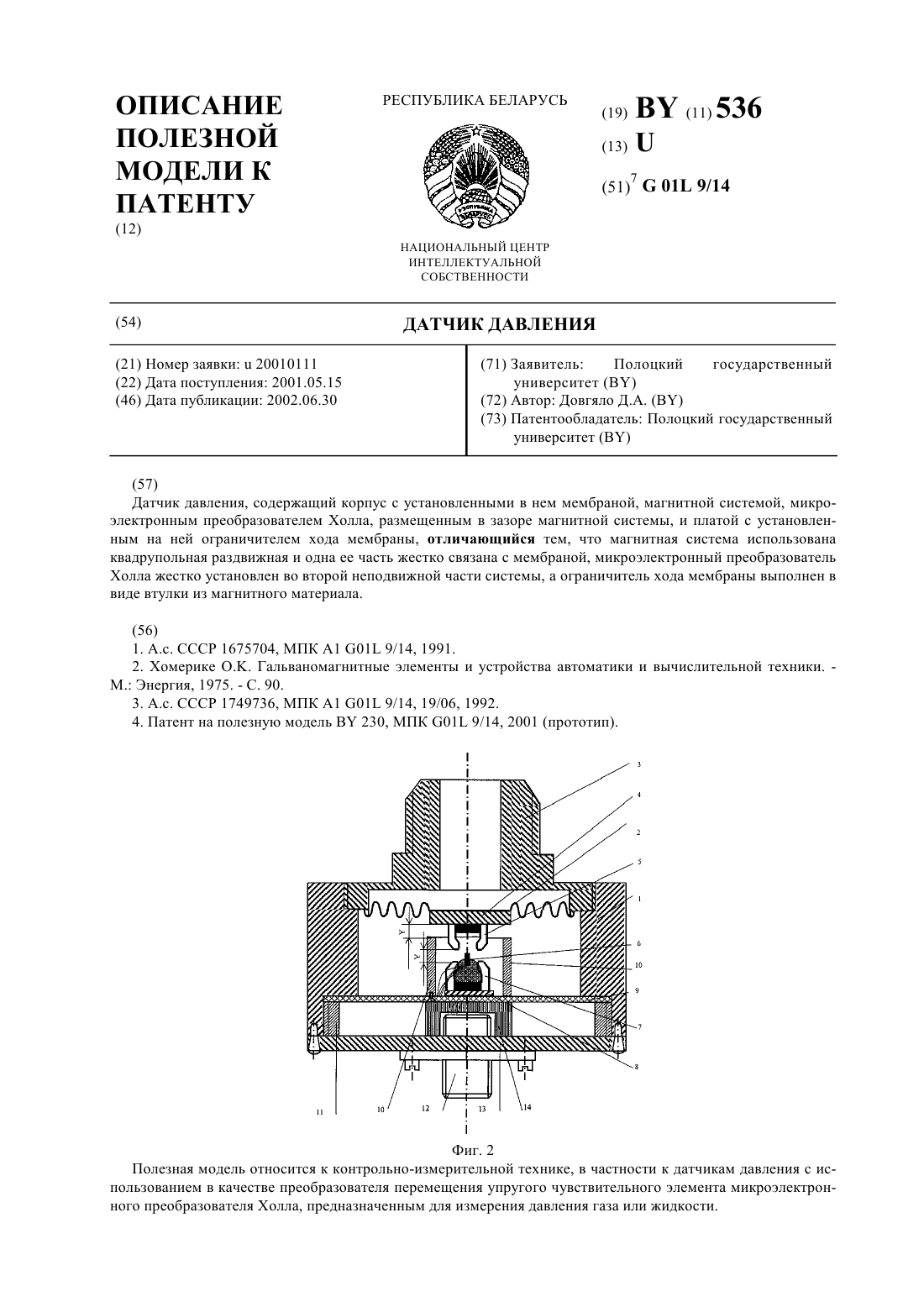
Номер патента: U 536
Опубликовано: 30.06.2002
Автор: Довгяло Дмитрий Александрович
МПК: G01L 9/14
Текст:
...неподвижно установлен на плате. За счет применения дипольной магнитной системы градиент магнитной индукции в направлении механического перемещения имеет достаточно высокое значение. Однако данная система имеет невысокую линейность преобразования линейность сохраняется лишь на незначительном участке А-Б (фиг. 1). Задача полезной модели - повышение точности и линейности измерений, расширение динамического диапазона работы и устранение влияния...
Предыдущий патент: Устройство для продольного разделения раската при многоручьевой прокатке
Следующий патент: Гербицидные средства с эфирами 4-иод-2-[3-(4-метокси-6-метил-1,3,5-триазин-2-ил)уреидосульфонил]бензойной кислоты
Случайный патент: Устройство для наблюдения в условиях ограниченной видимости (варианты)