Способ и система для определения очага лесного пожара
Текст
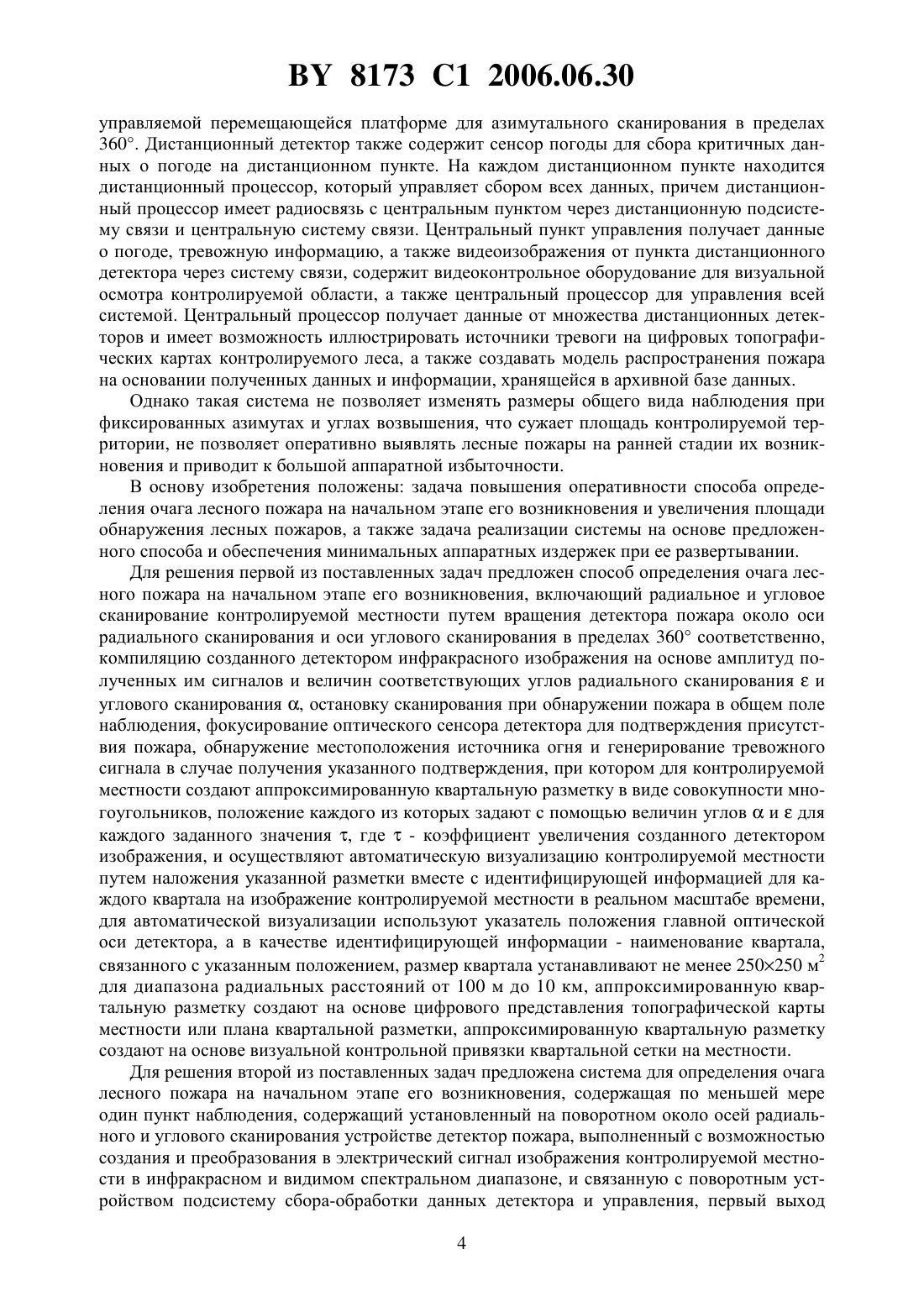
СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ОЧАГА ЛЕСНОГО ПОЖАРА(71) Заявитель Белорусский государственный университет(72) Автор Левко Иван Аркадьевич(73) Патентообладатель Белорусский государственный университет(57) 1. Способ определения очага лесного пожара на начальном этапе его возникновения,включающий радиальное и угловое сканирование контролируемой местности путем вращения детектора пожара около оси радиального сканирования и оси углового сканирования в пределах 360 соответственно, компиляцию созданного детектором инфракрасного изображения на основе амплитуд полученных им сигналов и величин соответствующих углов радиального сканированияи углового сканирования , остановку сканирования при обнаружении пожара в общем поле наблюдения, фокусирование оптического сенсора детектора для подтверждения присутствия пожара, обнаружение местоположения источника огня и генерирование тревожного сигнала в случае получения указанного подтверждения, отличающийся тем, что для контролируемой местности создают аппроксимироанную квартальную разметку в виде совокупности многоугольников, положение каждого из которых задают с помощью величин угловидля каждого заданного значения , где- коэффициент увеличения созданного детектором изображения, и осуществляют автоматическую визуализацию контролируемой местности путем наложения указанной разметки вместе с идентифицирующей информацией для каждого квартала на изображение контролируемой местности в реальном масштабе времени. 8173 1 2006.06.30 2. Способ по п. 1, отличающийся тем, что для автоматической визуализации используют указатель положения главной оптической оси детектора, а в качестве идентифицирующей информации - наименование квартала, связанного с указанным положением. 3. Способ по п. 1, отличающийся тем, что размер квартала устанавливают не менее 250250 м 2 для диапазона радиальных расстояний от 100 м до 10 км. 4. Способ по п. 1, отличающийся тем, что аппроксимированную квартальную разметку создают на основе цифрового представления топографической карты местности или плана квартальной разметки. 5. Способ по п. 1, отличающийся тем, что аппроксимированную квартальную разметку создают на основе визуальной контрольной привязки квартальной сетки на местности. 6. Система для определения очага лесного пожара на начальном этапе его возникновения, содержащая по меньшей мере один пункт наблюдения, содержащий установленный на поворотном около осей радиального и углового сканирования устройстве детектор пожара, выполненный с возможностью создания и преобразования в электрический сигнал изображения контролируемой местности в инфракрасном и видимом спектральном диапазоне, и связанную с поворотным устройством подсистему сбора-обработки данных детектора и управления, первый выход которой соединен с первым входом подсистемы связи,отличающаяся тем, что содержит устройство суммирования изображений, устройство воспроизведения изображения, а также установленные на осях поворотного устройства датчики углов радиальногои угловогоположений детектора, выходы которых соединены с первым и вторым входами подсистемы сбора-обработки данных и управления, выполненной с возможностью задания коэффициентаувеличения созданного детектором изображения, выход детектора соединен с третьим входом подсистемы сбора-обработки данных и управления и первым входом устройства суммирования изображений, второй вход которого соединен со вторым выходом подсистемы сбора-обработки данных и управления, а выход подключен ко входу устройства воспроизведения изображения и второму входу подсистемы связи, при этом устройство суммирования изображений выполнено с возможностью суммирования созданного детектором изображения контролируемой местности и созданного устройством сбора-обработки данных с учетом сигналов указанных датчиков изображения аппроксимированной квартальной разметки этой местности в виде совокупности многоугольников, с идентифицирующей информацией для каждого квартала. 7. Система по п. 6, отличающаяся тем, что подсистема связи выполнена с возможностью обмена изображениями и управляющими командами между соседними пунктами наблюдения. 8. Система по п. 6, отличающаяся тем, что точность датчика радиального положения детектора составляет 0,003 . 9. Система по п. 6, отличающаяся тем, что подсистема сбора-обработки данных выполнена с возможностью задания коэффициентав диапазоне 1-100. Изобретение относится к области систем слежения за объектом и может быть использовано для раннего обнаружения лесных пожаров. Известен двухволновой способ обнаружения 1, использующий прием и преобразование в электрические сигналы суммарного излучения как от огня, так и от других источников инфракрасного излучения, на двух длинах волн, выделение амплитуд множества фликкер-частот (в диапазоне 0-10 Гц) для каждого из этих электрических сигналов вычисление отношения амплитуд соответствующих фликкер-частот для каждого из этих электрических сигналов, формирование индикатора отношения, если отношение соответствующих фликкер-частот первой и второй длин волн превышает заданный порог, форми 2 8173 1 2006.06.30 рование индикатора корреляции, если корреляция между фликкер-частотами для первой и второй длин волн является положительной, формирование положительного индикатора для каждой из фликкер-частот, для которых сформированы как индикатор отношения, так и индикатор корреляции. Данный способ позволяет различать небольшой сигнал от огня в присутствии значительно большего сигнала от других источников излучения случайного или неслучайного происхождения. Однако такой способ не позволяет локализовать с высокой точностью очаг пожара на расстояниях, превышающих 1 км, из-за низкого значения отношения сигнал/шум на таких расстояниях. Наиболее близким по технической сущности к заявляемому является выбранный в качестве прототипа способ дистанционного обнаружения 2, использующий подготовку радиальной сканирующей антенны, прием сигнала, имеющего длину волны в пределах миллиметрового диапазона длин волн, через вышеуказанную радиальную сканирующую антенну, радиальное сканирование вышеуказанной радиальной сканирующей антенны вращением по крайней мере части сканирующей антенны около оси радиального сканирования и угловое сканирование вышеуказанной радиальной сканирующей антенны вращением радиальной сканирующей антенны около вертикальной оси углового сканирования в пределах 360, компиляцию изображения на основе амплитуд сигналов и углов радиального и углового сканирования, изменение угла возвышения для изменения разрешения изображения, остановку углового сканирования, когда сканирующее устройство обнаруживает пожар в общем поле наблюдения, фокусирование оптического сенсора для подтверждения присутствия пожара, и, если пожар присутствует, определение конкретного положения источника огня, располагающегося в пределах общего поля наблюдения, генерирование сигнала предупреждения и включение тревоги. Однако такой способ не дает возможности производить привязку очага возгорания к топографической основе местности в реальном масштабе времени и поддерживать квазипостоянной площадь общего вида наблюдения, что снижает оперативность обнаружения пожара на ранней стадии его возникновения. Известна система 3, включающая базовую станцию, расположенную в центре защищаемой области, причем указанная базовая станция снабжена средствами для генерирования и приема сканирующего лазерного луча, средствами обработки изображений и сигналов, средствами памяти, средствами речевого приема и передачи и средствами просмотра изображений, приемные средства, расположенные на базовой станции, для приема лазерного луча, сгенерированного базовой станцией и отраженного от осматриваемой области, обрабатывающие средства для обработки принимаемого отраженного света для генерирования изображения осматриваемой области, память для хранения одного или более сканированных изображений, используемых как контрольные изображения, сравнивающие средства для сравнения в любой заданный момент времени сканированного в реальном времени изображения с одним или более хранимым контрольным изображением для определения изменений, произошедших в изображении, которые превышают величины заданных порогов, и тревожные средства для предупреждения оператора базовой станции о любых таких изменениях. Однако такая система требует применения сложных методов обработки изображений для идентификации очага возгорания, что существенно снижает ее оперативность. Наиболее близкой по технической сущности к заявляемой является система наблюдения и мониторинга леса для раннего обнаружения и оповещения о лесных пожарах в контролируемом лесном массиве 4. Система включает множество дистанционных детекторов,установленных в пределах лесного массива и телеметрически связанных с центральной системой обработки. Каждый дистанционный детектор включает инфракрасный сенсор для обнаружения нагретых до 200-300 С источников излучения в малых угловых зонах вдоль нескольких линий сканирования и видеокамеру, установленные на дистанционно 3 8173 1 2006.06.30 управляемой перемещающейся платформе для азимутального сканирования в пределах 360. Дистанционный детектор также содержит сенсор погоды для сбора критичных данных о погоде на дистанционном пункте. На каждом дистанционном пункте находится дистанционный процессор, который управляет сбором всех данных, причем дистанционный процессор имеет радиосвязь с центральным пунктом через дистанционную подсистему связи и центральную систему связи. Центральный пункт управления получает данные о погоде, тревожную информацию, а также видеоизображения от пункта дистанционного детектора через систему связи, содержит видеоконтрольное оборудование для визуальной осмотра контролируемой области, а также центральный процессор для управления всей системой. Центральный процессор получает данные от множества дистанционных детекторов и имеет возможность иллюстрировать источники тревоги на цифровых топографических картах контролируемого леса, а также создавать модель распространения пожара на основании полученных данных и информации, хранящейся в архивной базе данных. Однако такая система не позволяет изменять размеры общего вида наблюдения при фиксированных азимутах и углах возвышения, что сужает площадь контролируемой территории, не позволяет оперативно выявлять лесные пожары на ранней стадии их возникновения и приводит к большой аппаратной избыточности. В основу изобретения положены задача повышения оперативности способа определения очага лесного пожара на начальном этапе его возникновения и увеличения площади обнаружения лесных пожаров, а также задача реализации системы на основе предложенного способа и обеспечения минимальных аппаратных издержек при ее развертывании. Для решения первой из поставленных задач предложен способ определения очага лесного пожара на начальном этапе его возникновения, включающий радиальное и угловое сканирование контролируемой местности путем вращения детектора пожара около оси радиального сканирования и оси углового сканирования в пределах 360 соответственно,компиляцию созданного детектором инфракрасного изображения на основе амплитуд полученных им сигналов и величин соответствующих углов радиального сканированияи углового сканирования , остановку сканирования при обнаружении пожара в общем поле наблюдения, фокусирование оптического сенсора детектора для подтверждения присутствия пожара, обнаружение местоположения источника огня и генерирование тревожного сигнала в случае получения указанного подтверждения, при котором для контролируемой местности создают аппроксимированную квартальную разметку в виде совокупности многоугольников, положение каждого из которых задают с помощью величин угловидля каждого заданного значения , где- коэффициент увеличения созданного детектором изображения, и осуществляют автоматическую визуализацию контролируемой местности путем наложения указанной разметки вместе с идентифицирующей информацией для каждого квартала на изображение контролируемой местности в реальном масштабе времени,для автоматической визуализации используют указатель положения главной оптической оси детектора, а в качестве идентифицирующей информации - наименование квартала,связанного с указанным положением, размер квартала устанавливают не менее 250250 м 2 для диапазона радиальных расстояний от 100 м до 10 км, аппроксимированную квартальную разметку создают на основе цифрового представления топографической карты местности или плана квартальной разметки, аппроксимированную квартальную разметку создают на основе визуальной контрольной привязки квартальной сетки на местности. Для решения второй из поставленных задач предложена система для определения очага лесного пожара на начальном этапе его возникновения, содержащая по меньшей мере один пункт наблюдения, содержащий установленный на поворотном около осей радиального и углового сканирования устройстве детектор пожара, выполненный с возможностью создания и преобразования в электрический сигнал изображения контролируемой местности в инфракрасном и видимом спектральном диапазоне, и связанную с поворотным устройством подсистему сбора-обработки данных детектора и управления, первый выход 4 8173 1 2006.06.30 которой соединен с первым входом подсистемы связи, которая дополнительно содержит устройство суммирования изображений, устройство воспроизведения изображения, а также установленные на осях поворотного устройства датчики углов радиальногои угловогоположения детектора, выходы которых соединены с первым и вторым входами подсистемы сбора-обработки данных и управления, выполненной с возможностью задания коэффициентаувеличения созданного детектором изображения, выход детектора соединен с третьим входом подсистемы сбора-обработки данных и управления и первым входом устройства суммирования изображений, второй вход которого соединен со вторым выходом подсистемы сбора-обработки данных и управления, а выход подключен ко входу устройства воспроизведения изображения и второму входу подсистемы связи, при этом устройство суммирования изображений выполнено с возможностью суммирования созданного детектором изображения контролируемой местности и созданного устройством сбора-обработки данных с учетом сигналов указанных датчиков изображения аппроксимированной квартальной разметки этой местности в виде совокупности многоугольников,с идентифицирующей информацией для каждого квартала, подсистема связи выполнена с возможностью обмена изображениями и управляющими командами между соседними пунктами наблюдения, точность датчика радиального положения детектора составляет 0,003, подсистема сбора-обработки данных выполнена с возможностью задания коэффициентав диапазоне 1-100. Сущность изобретения поясняется фиг. 1-фиг. 5, где на фиг. 1 изображена площадь уверенного контроля системы обнаружения лесных пожаров, состоящей из 3-х ПН, при использовании метода кросс-пеленгации, на фиг. 2 изображена упрощенная модель одного лесного квартала на местности, обозреваемая ПН, на фиг. 3 изображена визуализация двумерного изображения границ лесного квартала (номер квартала условно выбран равным 35) посредством набора элементов изображения (пикселов) с разрешением , ,на фиг. 4 показано изображение лесного квартала, получаемое на ПН путем применения предлагаемого способа (номер квартала условно выбран равным 35), на фиг. 5 изображена структурная схема ПН предлагаемой системы обнаружения лесных пожаров. Оперативность определения очага лесного пожара зависит, в основном, от двух факторов скорости выявления факта возгорания и скорости обнаружения местоположения очага возгорания. Существенное значение при этом имеет предельная площадь уверенного контроля ,которая является важной характеристикой эффективности систем обнаружения лесных пожаров. Предельная площадьслагается из площадей обнаружения отдельных пунктов наблюдения (ПН) ПН и зависит от рельефа контролируемой территории, метеорологических условий, времени суток, точности локализации очага возгорания и допустимых значений вероятностей ложной тревоги и пропуска пожара. В свою очередь площадь обнаружения ПН может быть выражена через радиус обнаружения каждого ПН (вышки) в предположении, что оптическая ось наблюдения, проходящая через дымовой шлейф, пересекает линию горизонта в зоне, контрастной к цвету дымового шлейфа, по формуле где А - область допустимого контраста, Ф - функция контраста дымового шлейфа на местности,- радиус наблюдения,- азимут. Функция контраста является сложной характеристикой системы, связанной с различными параметрами, к которым можно отнести рельеф местности, время суток, метеорологические условия, высоту вышки ПН, качество приемно-регистрирующей аппаратуры,качество ретрансляции и воспроизведения видеоизображения. В предельном случае это выражение сводится к 5 где- предельное расстояние, при котором вероятность пропуска возгорания меньше допустимой величины при использовании плоской монотонной модели ландшафта или эффективный радиус обнаружения. Это условие применимо, когда местность представляет собой плоскость, перпендикулярную основанию вышки, либо имеющую монотонный наклон как в сторону больших,так и меньших высот. Нарушение монотонности (резкие подъемы или спады высот) приводит к потере контраста и, следовательно, уменьшает площадь обнаружения. При этом выражение (2) дает слишком грубые результаты и для расчетов следует применять выражение (1). Площадь уверенного контроля зависит от числа пунктов наблюдения , ПН отдельных ПН и метода определения местоположения очага возгорания, от которого зависит коэффициент , и может быть представлена уравнением Скорость обнаружения местоположения пожара зависит от точности определения азимута и расстояния до очага возгорания ОВ. Для повышения точности определения расстояния может быть использован метод засечки или кросс-пеленгации 5. Этот метод (фиг. 1) требует измерения направления из различных точек наблюдения,как правило, двух или трех, и дает хорошие результаты при ОВ. Величина коэффициентадля этого метода для случая 2-х ПН, расстояние междукоторыми равно , при условии абсолютного контраста и плоского рельефа местности будет задаваться выражением где/2. Если, например,, то с учетом выражений (2-4)0,2. Отсюда видно,что основным недостатком этого метода является существенное снижение площади обнаружения. Кроме того, засечка объекта, пространственные характеристики которого зависят от угла наблюдения (например, дымового шлейфа), представляет определенные трудности. В свою очередь использование на каждом ПН дальнометрической аппаратуры для измеренияприводит к значительным материальным издержкам, а традиционное измерение дальности с помощью глазомера может давать весьма приблизительные результаты. Системы обнаружения лесных пожаров используют стационарные (неподвижные) ПН,что обусловливает снижение площади кросс-пеленгации, которая, как известно, обеспечивает высокую эффективность обнаружения для подвижных ПН. Однако стационарность ПН имеет и положительную сторону, которая обусловливает возможность геодезической привязки ПН, наблюдаемого объекта и его положения на плане местности. Практически это достигается установлением связи между пространственным положением главной оптической оси регистрирующей аппаратуры каждого ПН и топографической основой местности. В этом случае отпадает необходимость определения расстояния до объекта, так как появляется возможность точно определить какие объекты попадают в поле зрения ПН в каждом конкретном случае. Помимо этого, не требуется централизованная иерархическая организация системы обнаружения лесных пожаров, которая предполагает наличие центрального пункта наблюдения (ЦПН), координирующего деятельность всей системы посредством передачи/приема цифровых изображений местности и телеметрических команд для всех 6 8173 1 2006.06.30 развернутых пунктов наблюдения, а также мощной управляющей ЭВМ на ЦПН, содержащей помимо управляющего программно-математического обеспечения цифровую карту местности. Положение главной оптической оси регистрирующей аппаратуры может быть описано с помощью 2-х координат- азимута (угла углового сканирования),- угла радиального сканирования. Для описания общего поля наблюдения требуется дополнительная характеристика- коэффициент увеличения созданного детектором изображения, который слагается из увеличения оптики входного объектива и коэффициента изменения размера элемента изображения преобразователя оптического излучения в электрический сигнал или дискретного увеличения. Для обнаружения начального этапа возникновения лесного пожара с помощью данных координат должна быть обеспечена возможность математического описания участков местности площадью 250250 м 2 на расстояниях. Отсюда может быть определена дискретность задания , . Угловая протяженность отрезка ,перпендикулярного линии наблюдения, может быть представлена в виде Если принять 10 км,250 м и 1, то угловая протяженностьотрезка ,перпендикулярного линии наблюдения, на плоскости составляет около 1,4. Данная дискретность обеспечивается типовыми поворотными устройствами. Угловая протяженность отрезка , расположенного вдоль линии наблюдения, может быть рассчитана с помощью выражения- высота вышки ПН. Для 10 км,30 м,250 м на основании выражения (6) получим 0,0043. Для реализации такой дискретности на практике требуется точная механика. Однако, если учесть, что современные датчики углового положения имеют разрешение 0,003 и выше, то поворотное устройство с такой дискретностью вполне реализуемо на практике. Например, фирмавыпускает прецизионный резистивный вращательный датчик углового положения 2001502 6, который имеет линейность 0,015 в диапазоне 350. Так как для обозрения в радиальном направлении достаточно углового диапазона 70, то, используя прецизионный привод на данный датчик положения с коэффициентом 15, можно получить линейность, которая будет в 5 раз выше и составит 0,003 . Для современных оптических сенсоров величинаизменяется в пределах 1100. Поэтому значение 0,5 является достаточным для задания дискретности изменения коэффициента увеличенияпоследнего. Как правило, для создания планов квартальной разметки лесных хозяйств используется масштаб изображения леса 110000. Для описания координат контролируемой с помощью одного ПН территории в декартовой системе координат при 10 км требуется задать координаты минимум 30000 элементарных участков (при дискретности 100100 м 2),то есть около 60000 точек в трехмерном пространстве. Это возможно при использовании достаточно мощной компьютерной техники, например персонального компьютера. Однако, применение технологии географических информационных систем (ГИС) позволяет избежать необходимости хранения цифровой копии обычных топографических карт в машинной памяти, которые представляют совокупность высот точек на местности над уровнем моря как функцию широты и долготы в зависимости от масштаба карты и метода проецирования сферической поверхности на плоскость. С учетом этого в предло 7 8173 1 2006.06.30 женном способе на основе плоской модели местности расстояния между точками местности выражены через углы возвышения, а положение точек - через азимуты, что снижает количество хранимых координат и обеспечивает возможность эффективной выборки географических данных по различным критериям поиска при выявлении очага возгорания. Для пояснения данного факта рассмотрим упрощенную модель местности (фиг. 2). Здесь начало координатсовмещено с положением вышки ПН, высота основания которой над уровнем моря задается величиной , а высота самой вышки - ПН. На рисунке показан только один квартал, границы которого представлены высотами над уровнем моря 1, 2, 3, 4 и точка пересечения главной оптической оси Р (в данном случае - линии визирования) детектора пожара с земной поверхностью, высота которой равна . Остальные точки местности опущены. При решении задачи определения принадлежности точкик определенному лесному кварталу требуется решить задачу принадлежности этой точки к области, задаваемой границами этого квартала. В линейной системе координат для этого границы всех кварталов могут быть представлены в виде прямых линий в пространстве при аппроксимации такой области многоугольником и критерием принадлежности точкик определенному кварталу может служить учет пересечений проекции линии визирования на плоскостьпроекций границ кварталов на эту же плоскость. Очевидно, что у искомого квартала число таких пересечений будет на 1 меньше от максимально возможного числа пересечений. Однако данный подход требует проведения большого числа операций умножения и деления, что существенно увеличивает время определения номера квартала. Процедура поиска квартала может быть ускорена, если перейти к угловым координатам для задания точек земной поверхности. При этом каждая -ая точка будет описываться азимутальным углом , углом радиального сканированияи высотой . Согласно фиг. 2, ряд чисел, образованный разностями азимутального угла текущего положения линии визирования и азимутальных углов, задающих границы квартала, р - , для изображенного квартала будет знакопеременным, а для всех остальных кварталов - знакопостоянным. Эта же закономерность справедлива для ряда чисел, образованного разностями угла возвышения текущего положения линии визирования и углов возвышения, задающих границы квартала. Тогда критерием попадания линии визирования в определенный квартал будет задаваться одновременным выполнением следующих неравенств где- число точек, задающих границы квартала. При этом не требуется учитывать величину . На типовых планах квартальной разметки лесничеств величина кварталов может колебаться от 50 до 1600 га. Если принять за основу минимальную площадь квартала 50 га и аппроксимацию каждого квартала четырехугольником, то при 10 км требуется задать координаты 630 таких областей, то есть всего лишь около 1260 пар угловых координат , . При этом обработка данных по критериям (7), (8) может быть реализована на однокристальном микроконтроллере, например, 3254 фирмы 7,имеющем первичный и вторичный банки -памяти объемом соответственно 256 и 32 КБ иобъемом 32 КБ. Для визуализации положения общего вида контролируемой местности относительно квартальной разметки на данное изображение может быть наложен указатель главной оптической оси, например в виде перекрестия, и номер квартала (фиг. 4). Тогда при обнаружении очага пожара для определения его местоположения достаточно навести вышеуказанное перекрестие на этот очаг. 8 8173 1 2006.06.30 Кроме того, в некоторых случаях оперативность доставки средств пожаротушения может быть повышена, если известно расположение границ квартала на изображении местности. Решение этой задачи требует визуализации квартальной разметки в реальном масштабе времени. При этом основной сложностью является тот факт, что при изменении увеличения детектора пожара изменяется положение границ лесного квартала на изображении. Поэтому определение положения границ квартала необходимо производить относительно точки, инвариантной к изменению увеличения. В качестве такой точки может быть выбрано положение оптической оси детектора пожара, так как из теории оптических приборов известно, что изображение точечного источника, находящегося на оптической оси оптической системы, будет также находиться на этой оси вне зависимости от увеличения данной системы. Для упрощения расчетов можно считать, что в первом приближении для равнинных территорий все точки земной поверхности, относящиеся к отдельному кварталу,лежат на одной плоскости, причем эта плоскость параллельна плоскости . Согласно фиг. 2, такой точкой является точка Р, представляющая проекцию точки пересечения линии визирования Р с земной поверхностьюна плоскость . Тогда величина нормалей, проведенных от оснований высот 1-4 к проекции линии визированияна плоскость ху, и положение этих нормалей на данной линии относительно точки Р могут быть выбраны в качестве базовых отрезков для визуализации границ квартала. Изображение на фиг. 3 построено с учетом вышесказанного в предположении, что номер квартала условно выбран равным 35. Линияна фиг. 3 соответствует проекции линии визированияна плоскость ху (фиг. 2), точка Р - точке Р. Как известно, двумерные изображения представляются набором элементов изображения (пикселов) и имеют горизонтальную и вертикальную границы, обозначенные на фиг. 3 соответственнои . Координаты -ой граничной точки квартала 35 могут быть заданы величинами , . Выражения для расчета этих величин, согласно теории оптических приборов, будут иметь следующий вид где р, р - координаты точки Р на изображении- коэффициент увеличения изображения- расстояние от оптического центра детектора пожаров до изображения, проецируемого на светочувствительный элемент, например ПЗС-матрицу р, р - угловые координаты линии визирования, выраженные в градусах ,- угловые координаты граничных точек лесного квартала, выраженные в градусах. Согласно выражениям, очевидно,что при изменении коэффициента увеличениянекоторые граничные точки текущего квартала могут выходить за пределы изображения либо быть искаженными из-за недостаточного разрешения изображения. В этих случаях может применяться технология генерализации по аналогии с ГИС 8. Кроме того, возможность измененияпозволяет производить подстройку видимых контуров квартальной разметки в зависимости от положения квартала относительно ПН в автоматическом режиме с тем, чтобы на изображении квартал был полностью виден. При этом оптимальное значениедля каждого квартала может быть занесено в память системы на этапе подготовки ее к работе. Это является одним из несомненных достоинств предложенного способа. Предложенный способ позволяет также решать задачу визуализации и при отсутствии цифровой карты контролируемой местности. Для этого можно использовать метод калиб 9 8173 1 2006.06.30 ровки по контрольным поджигам в контролируемом лесном массиве. При этом достаточно навести линию визирования, задаваемую, например, перекрестием (фиг. 4), на дымовой шлейф над кромкой леса от контрольного источника огня, выставить оптимальное увеличение изображения местности, задать номер квартала и сохранить азимутальные углы ,углы радиального сканированияи коэффициент увеличенияв энергонезависимой памяти системы. Следует отметить, что могут существовать и другие варианты визуализации квартальной разметки, что не меняет сути данного изобретения. Для реализации заявляемого способа предложена система для определения очага лесного пожара на начальном этапе его возникновения, имеющая повышенную оперативность, включающая, по меньшей мере, один пункт наблюдения (фиг. 5). Пункт наблюдения содержит детектор пожара 1, преобразующий излучение в одном или нескольких поддиапазонах длин волн от контролируемой местности в электрический сигнал, поворотное устройство 2, на котором установлен детектор, для задания азимутаи угла радиального сканированиядля горизонтального и вертикального обзора местности, подсистему сбора-обработки данных и управления 3, обеспечивающую координацию деятельности пункта наблюдения и взаимодействие с системой в целом, подсистему связи 4 для взаимодействия с другими пунктами наблюдения, датчики углов радиального 5 и углового 6 положения детектора, устройство суммирования изображений 7, устройство воспроизведения изображения 8. Пункт наблюдения функционирует следующим образом. В режиме слежения за контролируемым лесным массивом подсистемой сбора-обработки данных и управления 3 производится управление сканированием поворотного устройства 2 в автоматическом режиме, в процессе которого изменяются азимутальный уголв диапазоне 0360 и угол радиального сканированияв диапазоне 2090, например серпантинное сканирование,для того, чтобы охватить требующиеся участки лесного массива. При этом детектор 1 производит формирование изображения участка местности, например, в видимом спектральном поддиапазоне, регистрирует интенсивность суммарного излучения от этого участка, например в инфракрасном спектральном поддиапазоне, и производит электрический сигнал, содержащий информацию об указанном изображении и интенсивности. Данный сигнал обрабатывается подсистемой сбора-обработки данных и управления 3, которая анализирует интенсивность излучения на соответствие критерию превышения ее над средним уровнем. Одновременно с этим данная подсистема определяет пространственное положение линии визирования детектора на плане квартальной разметки лесного массива по текущим значениям азимутального углаи угла радиального сканированияв соответствии с выражениями (7), (8), рассчитывает границы квартала по выражениям (9), (10),устанавливает оптимальное значение коэффициента увеличениядетектора и формирует дополнительное изображение, содержащее идентифицирующую информацию, например номер квартала, и изображение границ квартала с учетом принципа генерализации ГИС 8. Это изображение накладывается на изображение местности, формируемое детектором 1, в устройстве суммирования изображений 7. Далее, суммарное изображение преобразуется в форму, удобную для просмотра оператором, в устройстве воспроизведения изображения, а также передается через подсистему связи 4 на другие пункты наблюдения системы раннего обнаружения пожаров. В случае возникновения пожара выполняется критерий превышения интенсивности излучения над средним уровнем, что вызывает останов сканирования и добавление в идентифицирующую информацию на дополнительном изображении, наряду с номером квартала, предупредительного сообщения о пожаре. Формирование сигнала, содержащего информацию об изображении и интенсивности светового потока, позволяет располагать детектор 1 и поворотное устройство 2 дистанционно от остальных устройств пункта наблюдения, а также передавать данную информацию 10 8173 1 2006.06.30 на другие ПН, что имеет важное значение для повышения оперативности обнаружения пожаров. При использовании стандартного телевизионного сигнала для передачи изображения местности, дополнительные данные в цифровом формате могут быть размещены в служебных строках по аналогии с телетекстом. В качестве прецизионного поворотного устройства 2 может быть выбрана поворотная платформа с подвижным элементом полусферической формы, который не требует применения зубчатой передачи изменения ее положения в пространстве и сводит к минимуму влияние люфта на точность задания положения линии визирования 9. Обеспечиваемая при этом точность определения вертикального углового положения 0,003 позволяет довести радиус обнаружения до 10 км. Таким образом, как видно из приведенного описания, применение данного способа и системы в сравнении с прототипом повышает оперативность выявления очага возгорания в лесных массивах, увеличивает площадь обнаружения системой обнаружения лесных пожаров до теоретически возможной, снижает аппаратные издержки на развертывание такой системы и не требует от обслуживающего персонала специальной подготовки для работы с последней. Источники информации 1. Патент США 5850182, МПК 08 017/12. - Опубл. 15.12.1998. 2. Патент США 5959589, МПК 01 003/00. - Опубл. 28.09.1999 (прототип). 3. Патент США 5500525, МПК 01 009/04. - Опубл. 19.03.1996. 4. Патент США 5734335, МПК 08 019/06. - Опубл. 31.03.1998 (прототип). 5. Патент США 5739789, МПК 01 003/02. - Опубл. 14.04.1999. 6..,,Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 12
МПК / Метки
МПК: G08B 17/12, G08B 25/00, G08C 19/06
Метки: система, определения, лесного, очага, пожара, способ
Код ссылки
<a href="https://by.patents.su/12-8173-sposob-i-sistema-dlya-opredeleniya-ochaga-lesnogo-pozhara.html" rel="bookmark" title="База патентов Беларуси">Способ и система для определения очага лесного пожара</a>
Способ тушения пожара и ранцевая установка для его осуществления
Номер патента: 2822
Опубликовано: 30.06.1999
Авторы: Астапов Валерий Петрович, ДЕМЕНЧЕНОК Петр Васильевич
МПК: A62B 18/00, A62C 15/00, A62C 5/00...
Метки: установка, ранцевая, способ, пожара, осуществления, тушения
Текст:
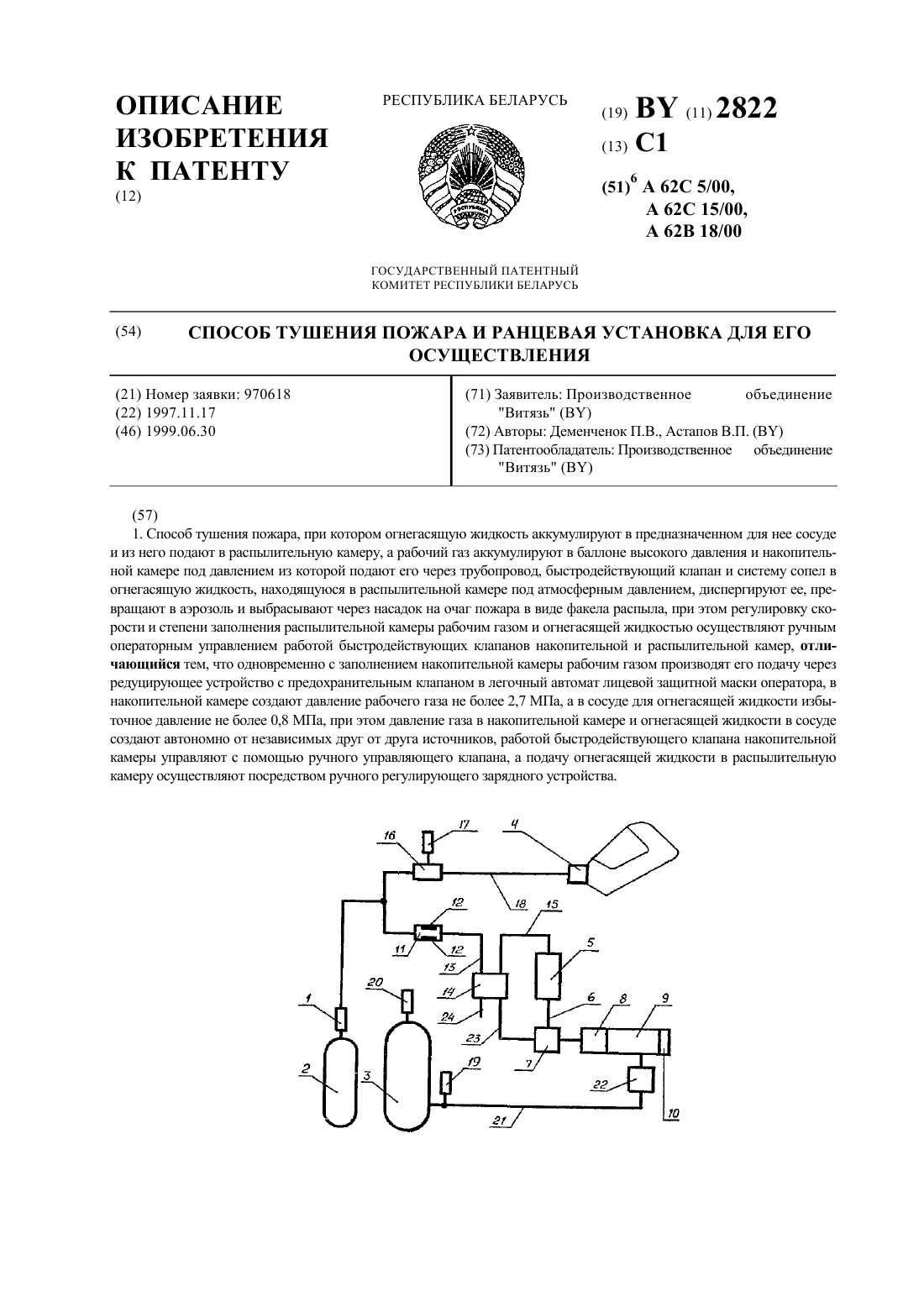
...газом производят его подачу через редуцирующее устройство с предохранительным клапаном в легочный автомат лицевой защитной маски оператора, в накопительной камере создают давление рабочего газа не более 2,7 МПа, а в сосуде для огнегасящей жидкости избыточное давление не более 0,8 МПа, при этом давление газа в накопительной камере и огнегасящей жидкости в сосуде создают автономно от независимых друг от друга источников, работой...
Система для определения конфигурации соединения портов передачи данных
Номер патента: 6726
Опубликовано: 30.12.2004
Автор: undefined
МПК: G06F 13/12
Метки: система, передачи, данных, соединения, портов, конфигурации, определения
Текст:
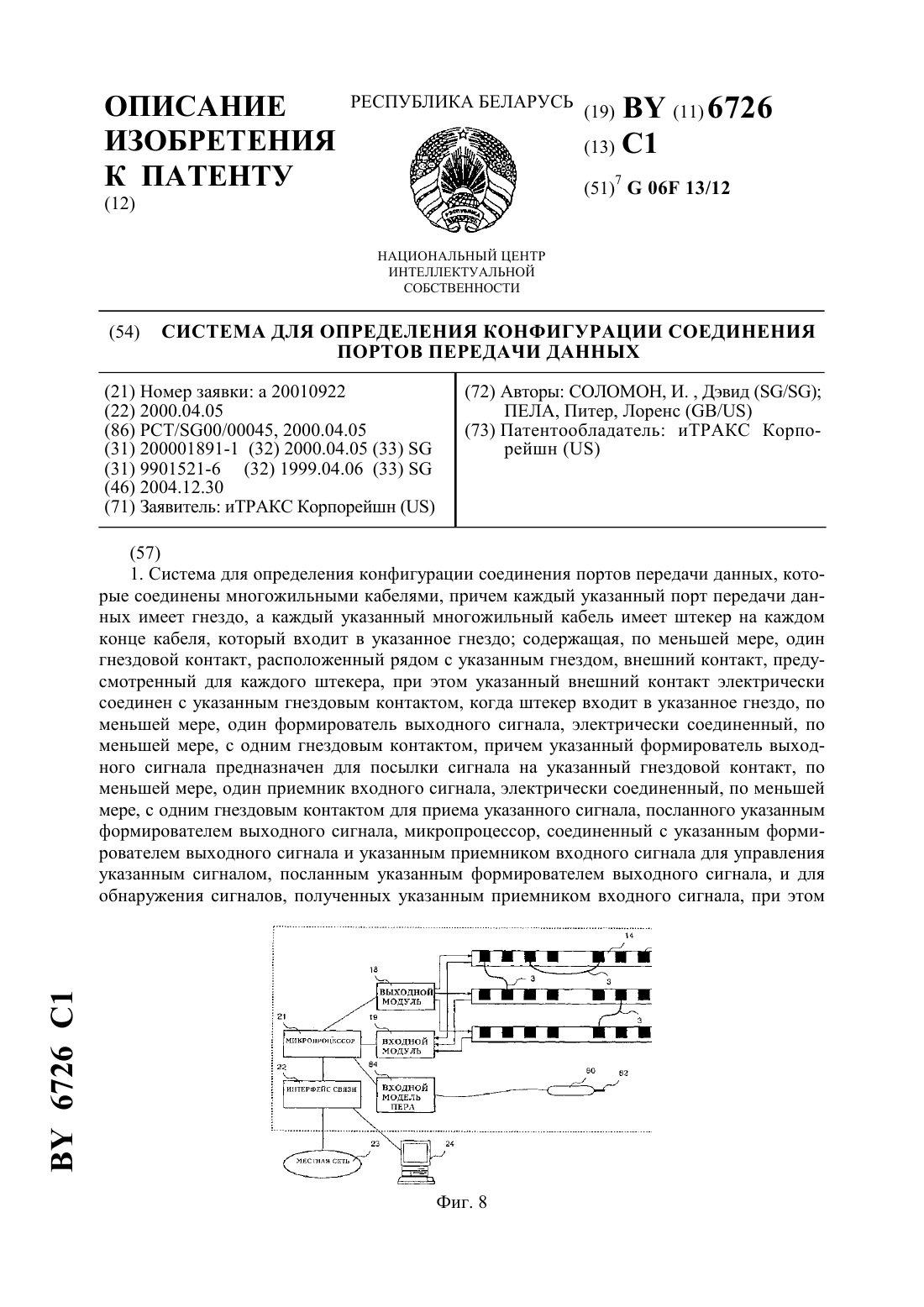
...разработка системы для контроля и определения соединения портов, которая не требует специальных наборных панелей или соединительных кабелей. Кроме того, целью настоящего изобретения является разработка системы для контроля и определения соединения портов, в которой используются стандартные соединительные кабели. 7 6726 1 Настоящее изобретение определяет и непрерывно отслеживает конфигурацию соединения портов данных, соединенных многожильными...
Устройство для тушения фонтанирующего источника пожара на устье скважины
Номер патента: 1905
Опубликовано: 30.12.1997
Авторы: Трушко Валентина Петровна, Дадиомов Евсей Исаакович
МПК: E21B 35/00
Метки: фонтанирующего, устройство, устье, источника, тушения, пожара, скважины
Текст:
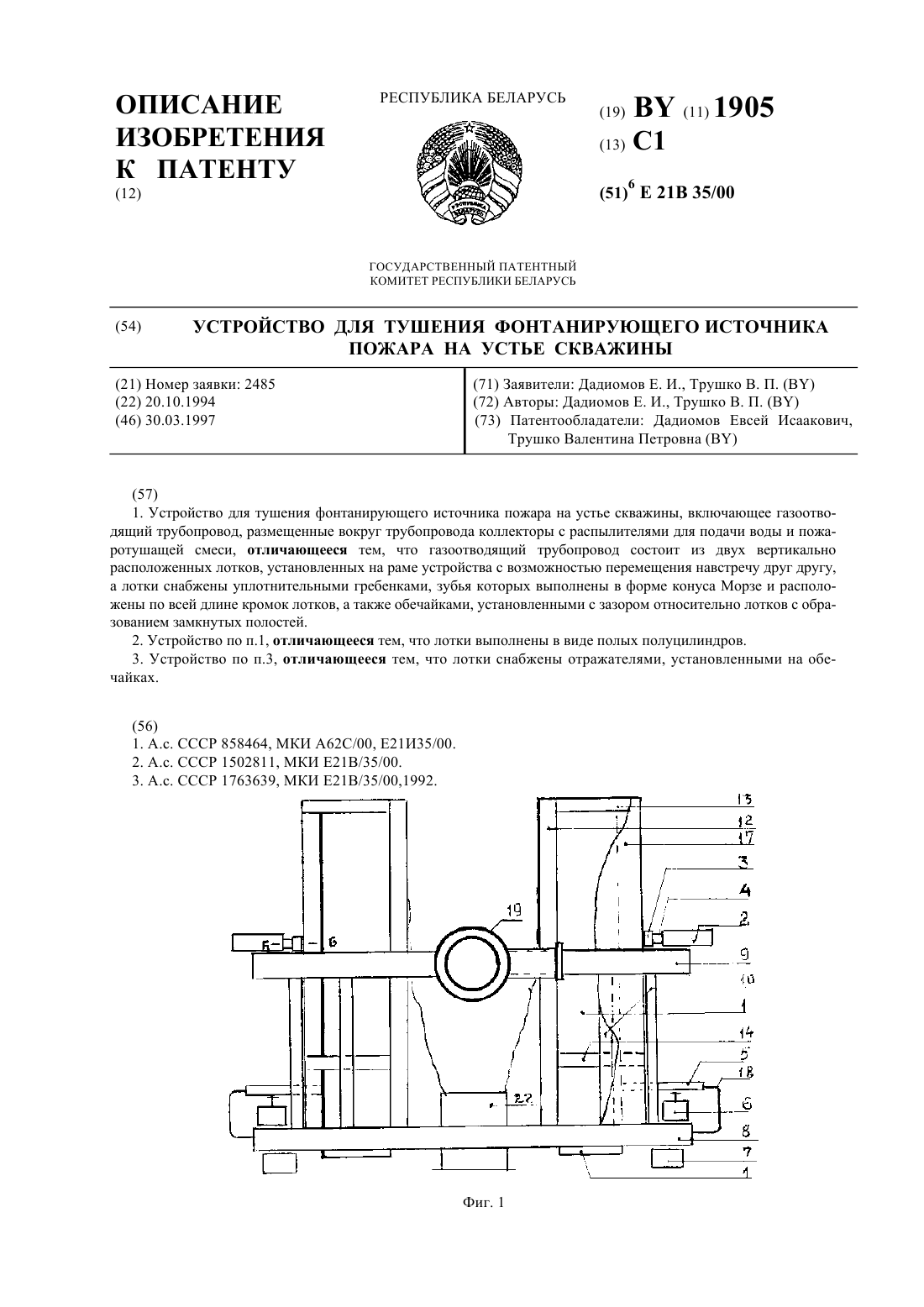
...тушения фонтанирующего источника пожара на устье скважины - вид спереди на фиг. 2 - вид сверху на фиг. 3 - узел скользящей подвески лотков на фиг. 4 - схема охлаждения устройства на фиг. 5 - лоток с соплами, коллекторами. Устройство состоит из двух стальных лотков 1, установленных на раме устройства с возможностью перемещения навстречу друг другу, например гидродомкратами 2 (фиг.1, 2), образующих цельный газопровод. Лотки 1 закреплены на...
Способ определения аномалии рефракции глаза и устройство для его реализации

Номер патента: 2943
Опубликовано: 30.09.1999
Авторы: Фролов Леонард Александрович, Козлов Иван Петрович, Яхницкая Людмила Константиновна, Федоров Юрий Германович
МПК: A61F 9/00
Метки: аномалии, устройство, определения, рефракции, способ, реализации, глаза
Текст:
...предлагаемого способа заключается в следующем. Светящийся точечный оптотип располагают на уровне глаз пациента на расстоянии 5 метров. Такое удаление оптотипа необходимо для обеспечения хорошей параллельности световых лучей, падающих на зрачок обследуемого глаза. Проходя через оптическую систему глаза, световой поток при наличии дефекта в ней рассеивается, образуя на глазном дне светлое пятно, конфигурация которого определяется аномалией...
Состав для тушения пожара
Номер патента: 3218
Опубликовано: 30.12.1999
Авторы: Пак Зиновий Петрович, Кривошеев Николай Алексеевич, Марченко Анатолий Васильевич, Деружинский Вячеслав Иванович, Дикова Мария Викторовна, Кузнецов Роберт Александрович, Коробенина Татьяна Павловна, Беляков Владимир Иванович, Шахрай Галина Григорьевна, Русин Дмитрий Леонидович, Андреева Елена Львовна, Голубев Анатолий Дмитриевич, Анашкин Павел Петрович, Белоконь Вячеслав Владимирович, Вершинин Владимир Николаевич, Перепеченко Борис Петрович
Метки: тушения, состав, пожара
Текст:
...изделий из таких состаВОВ, экспериментально подтверждено ИСПОЛЬЗОБЯНИО СВЯЗУЮЩИХ ПО прототипу И одновременно расширена номенклатура КЗУЧУКОВ, полимеров И смол, ИСПОЛЬЗУЕМЫХ В КЗЧССТВС горючего СВЯзующего. Показано, что они могут быть использованы в широких пределах, но для технологии непрерывного прессования В состав С ПОСЛСДНИМИ НСООХОДИМО ВВОДИТЬ ДОПОЛНИТСЛЬНО И пластификаторы. В качестве пластификаторов оценены нитраты различных...
Предыдущий патент: Прецизионный рециркуляционный дальномер
Следующий патент: Способ получения композиционного порошка
Случайный патент: Устройство для получения оксидокерамических покрытий